一级倒立摆的建模与控制分析
控制工程与仿真课程设计报告
报告题目直线一级倒立摆建模、分析及控制器的设计
组员1专业、班级14自动化1 班朱永远学号1405031009 组员1专业、班级14自动化1 班王宪孺学号1405031011 组员1专业、班级14自动化1 班金红学号1405031013
报告评分标准
总分
直线一级倒立摆建模、分析及控制器的设计
一状态空间模型的建立
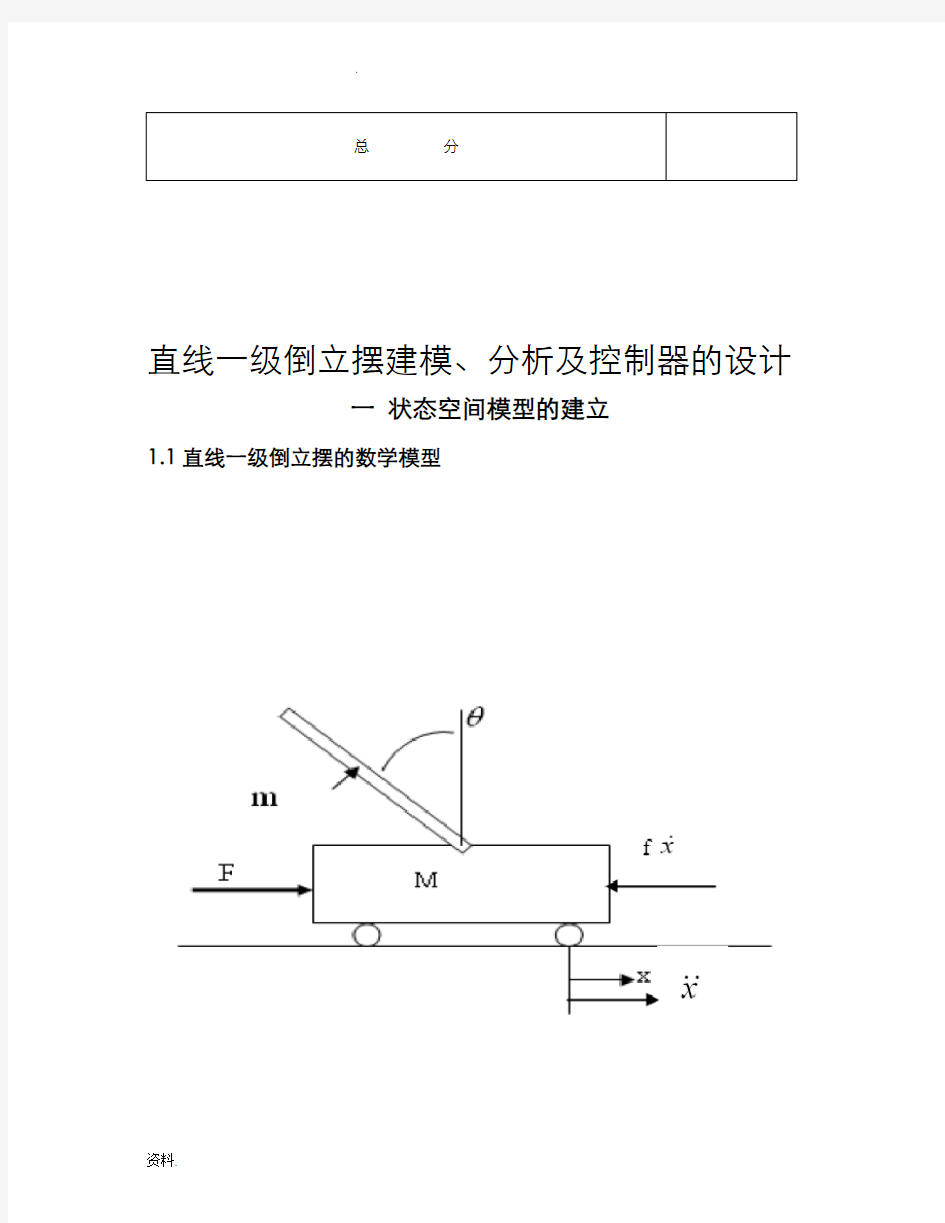
1.1直线一级倒立摆的数学模型
图1.1 直线一级倒立摆系统
本文中倒立摆系统描述中涉及的符号、物理意义及相关数值如表1.1所示。
图1.2是系统中小车的受力分析图。其中,N和P为小车与摆杆相互作用力的水平和垂直方向的分量。
图1.2 系统中小车的受力分析图
图1.3是系统中摆杆的受力分析图。F s是摆杆受到的水平方向的干扰力, F h是摆杆受到的垂直方向的干扰力,合力是垂直方向夹角为α的干扰力F g。
图1.3 摆杆受力分析图
分析小车水平方向所受的合力,可以得到以下方程:
()11-
设摆杆受到与垂直方向夹角为α 的干扰力Fg ,可分解为水平方向、垂直方向的干扰力,所产生的力矩可以等效为在摆杆顶端的水平干扰力FS 、垂直干扰力Fh 产生的力矩。
()21-
对摆杆水平方向的受力进行分析可以得到下面等式:
()θsin 22
l x dt
d m F N S +=- ()31-
即:
αθθθθsin sin cos 2f
F ml ml x
m N +-+= ()41-
对图1.3摆杆垂直方向上的合力进行分析,可以得到下面方程:
()θcos 22
l l dt
d m F mg P h -=++-
()51-
即 θθθθ
αcos sin cos 2 ml ml F mg P g
+=++- ()61-
力矩平衡方程如下:
N x f F x M --=
0cos sin sin cos cos sin =++++θ
θθθαθα I Nl Pl l F l F g g ()71-
代入P 和N ,得到方程:
()
0cos 2sin sin 2cos sin cos 2cos sin 2222=+-++++θθθθθθθαθαx
ml ml mgl ml I l F l F g g
()81-
设φπθ+=,(φ是摆杆杆与垂直向上方向之间的夹角,单位是弧度),代入上式。假设φ<<1,则可进行近似处理:
φφφφφφφ===???
??==2sin ,12cos ,0,sin ,1cos 2
dt d
由于:23
1
ml I =
方程化为:
()x
m mg ml F g
=-+--φφαφα3
4cos sin 2 ()91-
令:()αφαcos sin --=g f F F ,则()91-可化为:
x m mg ml F f
=-+φφ
3
42 ()101-
即是化简后的直线一级倒立摆系统微分方程。带入实际数据后,微分方程为:
m
F x f
234.29-+= θθ
()111-
当忽略了F f 时,系统的微分方程如式(1-12)所示
x 34.29+=θθ
()121-
忽略干扰力后,直线一级倒立摆系统是单输入二输出的四阶系统,考虑干扰力
α
sin g S F F =α
cos g h F F =
后,直线一级倒立摆系统是二输入二输出的四阶系统。其部的4个状态量分别是小
车的位移x 、小车的速度x
、摆杆的角度θ、摆杆的角速度θ 。系统输出的观测量为小车的位移x 、摆杆的角度θ。其控制量为小车的加速度θ
将微分方程(1-12)化为关于加速度输入量和角度输出量的传递函数:
()
()4
.293
2
-=s s R s θ ()131-
1.2 直线一级倒立摆系统的状态方程
实验所使用的直线一级倒立摆系系统是加速度x
作为系统的控制输入,所以根据式(1-12)建立系统的状态方程为:
x
l
l g x
x x x
4343+====φφφφ
整理后得到系统状态方程:
[][]x x x x y x l g x x l g
x x
??????+?????
?
????????????=??????=????
??????????+?????????????????????????
?=????????????000100
0001430100430
010********
10φφφφ
φφφ
将实际参数代入得到一级倒立摆系统的状态空间方程为:
[][]x x x x y x
x x x x ??
????+?????
?????????????=??????=?
?
???
???????+????????????????????????=????????????00
01000001301004.2900
1000000000
10φφφφφφφ
?????????
???=04.2900
1000000000
1
0A ?
????
?
??????=3010B ??
????=01000001C ??????=00D
二 运动分析、能控性及能观性分析
2.1 运动分析
线性定常系统非齐次状态方程为:
则其解为:
系统的输出方程为:
则
运动分析可以借助计算机的MATLAB 进行。用MATLAB 仿真求线性非齐次状态方程的解实例如例1 所示。
例1 已知系统状态方程为
用以下MATLAB 程序求系统方程的解。其中,collect( )函数的作用是合并同类项,而ilaplace( )
函数的作用是求取拉普拉斯逆变换,函数det( )的作用是求方阵的行列式,语句phi=subs(phi0,’
t’ ,(t-tao))表示将符号变量phi0 中的自变量t 用(t-tao)代换就构成了符号变量phi,而语句
x2=int(F,tao,0,t)表示符号变量F 对tao 在0 到t 的积分区间上求积分,运算结果返回到x2。
程序执行结果为