EPS双星型绕组六相电机复杂驱动及采样时序设计
大容量双六相储能电机系统建模与仿真_欧阳斌
第 18 卷
第1 期
2014 年 1 月
电 机 与 控 制 学 报 Electri c Machines and Control
Vol. 18 No. 1 Jan. 2014
大容量双六相储能电机系统建模与仿真
1 1 1 2 1 欧阳斌 , 马伟明 , 王东 , 魏克垠 , 翟小飞
第1 期
欧阳斌等: 大容量双六相储能电机系统建模与仿真
93
0
引
言
相应的大容量储能电机为其提供脉冲电源 。脉冲功 率负载由两套工作模式完全对称的变流器并联供 电, 每套变流器由两台级联的变流器构成 , 每台变流 系统结构如 器的直流母线由三相整流器提供支撑, 图 1 所示, 可为上述脉冲功率负载提供幅值 、 频率完 全可调控的大容量、 高质量电能。
A11 A12 A21 A22
2
系统结构
C12 B11 C11 B12
C22
B21
某负载所需的秒级脉冲功率几十兆瓦, 秒级内 消耗的电能达几十甚至近百兆焦, 普通市电电网难 以承受这种短时大容量载荷冲击, 因此需特别研制
C21
B22
图2 Fig. 2
发电机双六相绕组的相量图
Phasor of dualsix phase electric machine
通过电压电流和转速的仿真波形与实验波形vcmdpi调节电路电路尽管整个能量释放过程的电压电流和转速呈现大幅度快速动态变化但仿真vf滤波器程序仍较好地模拟了实际的能量释放过程仿真与励磁控制器模型框图figexcitercontroller将励磁机的励磁电压与励磁电流之间的传函近似等效成为一阶惯性环节其励磁电流反馈通道的滤波器截止频率低于pwm触发脉冲的载波频率据此可按照经典的自动控制理论配置内环pi调节器的参数
六相对称互补超大功率PFC电路的建模与设计
功率因素校正(Power Factor Correction,PFC)技术是电力电子领域研究的热点,随着电力电子设备的功率越来越大,中小功率的PFC技术已经不能满足要求,超大功率PFC解决方案的研究提上日程[1]。
单相Boost PFC技术和两相交错并联Boost PFC技术[2]已经发展得非常成熟,但随着电力电子设备功率等级的提高,这两种电路中的开关器件将承受更大的电流应力,直到不堪重负而崩溃,由于制造工艺和技术的限制,开关器件的功率不可能无限提高,只有在电路上加以改进才能进一步提高PFC电路的功率等级,因此文章提出了一种新型的六相对称互补超大功率PFC电路,其功率等级比是单相Boost PFC电路的六倍,两相交错并联Boost PFC电路的三倍,很大程度上减少了开关器件的电流应力,提高了电力电子设备的功率等级。
而其控制技术可采用比较成熟的单相Boost PFC电路的控制技术,如平均电流控制[3],电流峰值控制[4]、电流滞环控制[5]、单周期控制[6]和无差拍控制[7]等,并在此基础上加入均流控制。
其控制策略与另一种大功率的PFC技术,也就是“三相PWM整流电路”[8]相比,更加简单,实现起来比较容易,功率等级更高。
本文选择平均电流控制技术并配合均流技术来实现这种新型的六相对称互补超大功率PFC电路。
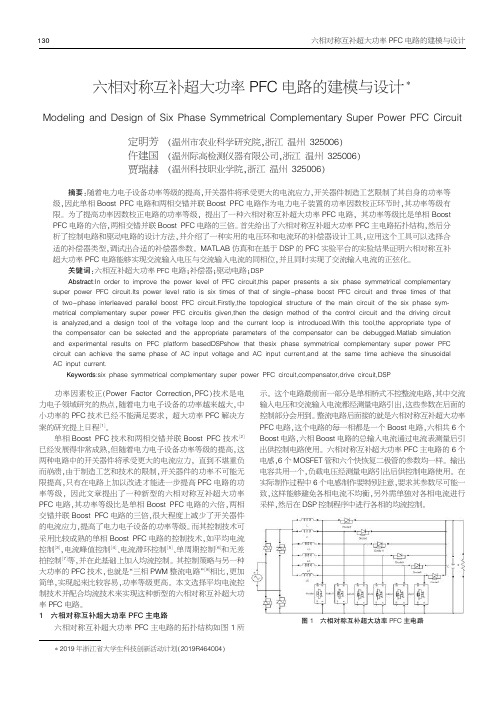
1六相对称互补超大功率PFC主电路六相对称互补超大功率PFC主电路的拓扑结构如图1所示。
这个电路最前面一部分是单相桥式不控整流电路,其中交流输入电压和交流输入电流都经测量电路引出,这些参数在后面的控制部分会用到。
整流电路后面接的就是六相对称互补超大功率PFC电路,这个电路的每一相都是一个Boost电路,六相共6个Boost电路,六相Boost电路的总输入电流通过电流表测量后引出供控制电路使用。
六相对称互补超大功率PFC主电路的6个电感,6个MOSFET管和六个快恢复二极管的参数均一样。
输出电容共用一个,负载电压经测量电路引出后供控制电路使用。
EPS双星型绕组六相电机复杂驱动及采样时序设计

EPS双星型绕组六相电机复杂驱动及采样时序设计作者:罗来军张善来源:《汽车与驾驶维修(维修版)》2019年第04期摘要:随着自动驾驶级别趋于SAE L4/L5的级别,传统的电动助力转向(EPS)作为自动驾驶执行器的关键部件已无法满足功能需求,采用双路备份的安全冗余电机结构和电控方案已经受到业界广泛关注。
本文提出一种应用于冗余式EPS的双星型绕组六相电机的电控驱动设计,公开阐明一种对冗余独立的双绕组的同步驱动、冗余输出及定时电流采样等方法。
通过该方法可实现电机单侧驱动及采样的运行失效,系统依旧能够维持另一侧驱动的冗余独立地运行,达到失效可用性的安全运行模式,大大提高了车辆行驶安全性。
关键词:六相电机;复杂驱动;采样时序中图分类号:U463 文献标识码:A对于现代汽车而言,转向控制系统的电气化成熟发展并形成的基于一款电机的EPS电控驱动,一般采用检测到失效之后切断电机的驱动输出电路且将系统置为安全状态,之后驾驶员依然能够夺回汽车的控制权。
但对于未来汽车而言,驾驶员的依赖将随着冗余度与多元化的增加而逐渐消失,失效保护( FaiISafe)模式将演化至失效后系统继续保持对汽车完全控制的失效可操作( Fail Operational)模式,由此对系统提出了供电电池系统、传感器、控制单元及执行器等冗余设计要求。
因此,双星型绕组六相电机驱动及采样时序设计,是将传统应用中的永磁同步三相无刷电机(PMSM)的转子绕组形成双份备份,在电控策略及驱动输出时分别两路冗余的PWM独立控制且保持时序的驱动同步性,在采样电路中应用统一的定时时基触发的双电阻ADC采样时刻,保证了单侧电机绕组的相电流等信号采样的复杂度,提升了在EPS应用中的转向系统鲁棒性。
1 六相电机复杂驱动方案设计本文根据冗余EPS软硬件架构的主从ECU设计,详解六相电机的转子冗余独立式结构[1],以及EcuA单侧“一拖二”形式的电机复杂驱动( Complex Driver)独立控制两组三相桥驱MOSFET电路的原理,最终实现对两组冗余独立绕组的PWM输出驱动功能。
机电综合设计

机械电子工程课程设计指导书浙江大宁波理工学院目录第一章概述 (2)一、机电专业课程设计目的 (2)二、机电专业课程设计的任务和要求 (2)三、机电专业课程设计的时间及进度安排 (2)第二章课程设计流程分析 (4)一、课程设计的应知与应会 (4)二、课程设计中的创新与综合 (4)三、课程设计的基本流程 (4)第三章总体方案设计 (6)一、驱动控制方式选择 (6)二、传动形式确定 (6)第四章步进电机的参数计算与选型 (7)第一节 步进电动机的分类 (7)第二节 步进电机的参数计算 (8)第三节 常用步进电机特性参数 (13)第五章机械系统设计计算 (21)第一节 齿轮传动副的选用 (21)第二节 滚珠丝杠设计计算 (23)第三节 滚动导轨设计计算 (30)第四节 联轴器的选用 (32)第五节 机械系统装配图基本要求 (33)第六章二坐标工作台数控装置设计与分析 (36)第一节 数控工作台电气原理图设计要求 (36)第二节 步进电机控制电路 (36)第三节 输入/输出通道设计 (39)第四节 人机交互通道配置与接口 (41)第五节 光电隔离电路设计与应用 (44)第六节 电源设计与选择 (48)第七节 典型数控工作台电气原理图分析 (52)第七章设计说明书撰写 (61)一、基本要求 (61)二、主要内容 (61)第八章课程设计资料提交与答辩 (62)一、设计资料提交 (62)二、答辩准备 (62)三、成绩评定 (62)附录 (63)第一章概述一、机电专业课程设计目的本课程设计是学生在完成专业课程学习后,所进行的机电一体化设备设计的综合性训练。
通过该环节达到下列目的:1、巩固和加深专业课所学的理论知识;2、培养理论联系实际,解决工程技术问题的动手能力;3、进行机电一体化设备设计的基本功训练,包括以下10个方面的基本功:1)查阅文献资料; 2)分析与选择设计方案;3)机械结构设计; 4)电气控制原理设计;5)机电综合分析; 6)绘制工程图;7)运动计算; 8)动力计算和精度计算;9)撰写设计说明书; 10)贯彻设计标准。
EPS双星型绕组六相电机复杂驱动及采样时序设计

图2 正六相电机图3 双三相电机
图5 冗余EPS电机驱动架构
图6 两路下桥臂双电阻采样
图7 双三相电机信号与时序关系图
图8 双绕组三相电机驱动采样时序图
图9 六相电机控制及诊断调度时序图
图10 六相电机驱动功能验证的示波器截图图11 六相电机驱动功能验证的Gliwa T1截图
图12 六相电机驱动及采样功能验证CANape观测图
4 结束语
本文基于六相电机工作原理,从电机控制的驱动输出理论与电机采样时序设计2个方面,阐述在EPS产品中的应用方法,利用单片机内核2个电机控制单元独立双三相PWM定时器输出及定时延迟采样触发时刻的方式,实现了双星型绕组UVW/ XYZ的冗余独立控制,且保证了时序上的同步性。
进一步实验论证了软件运行中,六相电机零电流、相电流、相电压以及RPS传感器相关数据的有效性和设计的合理性。
通过该设计应用将为推进冗余EPS六相电机在未来智能驾驶领域,转向执行器的安全和系统持续助力可用性提供技术保证。
执行元件的选择与设计OK课件

伺服系统结构图
1、开环伺服系统 (1)组成:☻步进电机; ☻驱动控制电路(控制器).
1、开环伺服系统
(2)开环伺服系统特点
① 没有位置和速度反馈回路; ② 设备投资低,调试维修方便; ③ 精度差; ④ 高速扭矩小.
(3)开环伺服系统应用场合 ①中、低档数控机床;
②普通机床数控改造.
一、执行元件的作用
1.作用:执行元件主要用来根据控制信息和指令, 将来自电、液压、气压等各种能源的能量转换成 旋转运动、直线运动等方式机械能,并完成要求 动作的能量转换装置,它在机电一体化系统中所 处的位置参见下图。
二、执行元件的种类及特点
根据使用能量的不同,可以将执行元件分为电气式、 液压式和气压式等几种类型。
采用脉宽调速驱动系统,开关频率高(2000~3000Hz), 伺服机构能够响应的频带范围也较宽,与晶闸管相比, 其输出电流脉动非常小,接近于纯直流。
• 日本法纳克(FANUC)公司生产的用于工业机器人、 CNC机床、加工中心(MC)的L系列(低惯量系列)、 M系列(中惯量系列)和H系列(大惯量系列直流伺服 电动机)。其中L系列适合于频繁起动、制动场 合应用,M系列是在H系列的基础上发展起来的, 其惯量较H系列小,适合于晶体管脉宽调制(PWM)
(回转运动) ➢ 表征输出动力的性能指标:推力F、转矩T、功率P ➢ 对直线运动:a=F/m;对回转运动:P=ωT,ε=T/J。即加速
度a与角加速度ε表征了执行元件的加速性能。 ➢ 比功率:表征动力大小的综合指标,包含功率、加速性能与
转速三种因素,即比功率=P ε/ω=T2/J (2)体积小,重量轻:用功率密度或比功率密度来评价
2、闭环与半闭环伺服系统
(1)闭环伺服系统组成示意图
六相感应电机建模与控制技术研究的开题报告
六相感应电机建模与控制技术研究的开题报告一、研究背景六相感应电机是一种新型电机,它与传统的三相感应电机相比,具有更高的效率、更稳定的性能和更广泛的应用范围。
六相感应电机的电容器起始方案比三相感应电机更加灵活,可以根据实际的应用场景来调整,这使得六相感应电机具有更高的适用性和灵活性。
同时,六相感应电机还具有更低的功率损耗和更高的绝缘强度,使得其在高温和高湿等苛刻的环境下也能够正常运转。
然而,目前对于六相感应电机的建模和控制技术仍存在很多挑战和难点,主要表现为以下几个方面:1.六相感应电机的电路模型较为复杂,需要考虑到更多的相数,因此建模难度较大。
2.六相感应电机的控制策略和方法还不够成熟,需要进一步探索和研究。
3.六相感应电机的应用场景多样,需要考虑到不同应用场景下的控制需求和特点。
为了进一步推进六相感应电机的研究和发展,本研究将围绕六相感应电机的建模与控制技术进行深入研究,探索和发展相应的技术方案,并在实际应用中进行验证和优化。
二、研究目的本研究的主要目的是:1.研究六相感应电机的电路模型,并建立相应的数学模型。
2.探索六相感应电机的控制方法和策略,发展相应的控制技术方案。
3.在实际应用中对研究结果进行验证和优化,并提出相应的改进意见和建议。
三、研究内容本研究的主要内容包括:1.六相感应电机的基本原理与电路模型分析。
2.六相感应电机的速度调节与定位控制策略分析。
3.基于MATLAB/Simulink和PLECS的六相感应电机仿真模型的建立与验证。
4.六相感应电机控制策略的实现与控制算法的设计。
5.基于硬件实验平台的六相感应电机的实际控制实验和性能分析。
四、研究意义本研究的意义在于:1.对六相感应电机的电路模型和控制技术进行深入研究,为这种新型电机的应用和推广提供技术支持。
2.借助MATLAB/Simulink和PLECS等计算机仿真软件,对六相感应电机的模型和控制策略进行验证和优化,提高研究效率和成果质量。
机电一体化第六章伺服驱动控制系统设计
钟。 F.体积小、自定位和价格低是步进电动机驱动控制的三大优势。 G. 步进电机控制系统抗干扰性好
上一页 下一页
二、 伺服驱动控制系统设计的基本要求
1. 高精度控制 2. 3. 调速范围宽、低速稳定性好 4. 快速的应变能力和过载能力强 5. 6.
闭环调节系统。
(4) ①
② 调节方法。
(5) ① 使用仪器。用整定电流环的仪器记录或观察转速实际值波形,电
② 调节方法。
上一页 下一页
六、 晶体管脉宽(PWN)直流调速系统
晶体管脉宽直流调速系统与用频率信号作开关的晶闸管系统相比,具 (1) 由于系统主电源采用整流滤波,因而对电网波形影响小,几乎不 (2) 由于晶体管开关工作频率很高(在2 kHz左右),因此系统的 (3) 电枢电流的脉动量小,容易连续,不必外加滤波电抗器也可平稳 (4) 系统的调速范围很宽,并使传动装置具有较好的线性,采用Z2
上一页 下一页
(2) ① A. 步进电动机型号:130BYG3100D (其他型号干扰大) B. 静转矩15 N·m C. 步距角0.3°/0 6°
D. 空载工作频率40 kHz E. 负载工作频率16 kHz ② A. 驱动器型号ZD-HB30810 B. 输出功率500 W C. 工作电压85~110 V D. 工作电流8 A E. 控制信号,方波电压5~9 V,正弦信号6~15 V ③ 控制信号源。
(3) ① 标准信号控制系统(如图6-16) ②检测信号控制系统 (如图6-17)
③ 计算机控制系统(如图6-18)
上一页 返 回
图6-16 标准信号控制系统图 图6-17 检测信号控制系统图 图6-18 计算机控制系统图
两个不同结构六相永磁同步电机串联驱动系统
两个不同结构六相永磁同步电机串联驱动系统苗正戈;刘陵顺;张海洋【期刊名称】《电机与控制应用》【年(卷),期】2011(38)7【摘要】由于多相电机较以前传统的三相电机优点明显,因此越来越受到关注.其优点之一就是多台多相电机可以进行串联,并且串联的多台电机由一台电压源型逆变器供电,减少了逆变器支路数量,使设备的体积大大减小.系统由一台对称六相永磁同步电机(PMSM)和一台夹角为0°的六相PMSM组成,两台电机的定子绕组按照一定的方式联接,运用矢量控制技术使两电机解耦,两电机实现独立控制.从电机的结构入手,分析两电机原理及串联规则,并建立两电机串联的数学模型,最后确定串联驱动系统的动态解耦性.%Multiphase motors were gaining an increasing interest due to the advantages they possess compared to conventional three-phase motors. One of these advantage was that several multiphase motors could connect in series and these motors powered by a voltage source inverter. Reducing the number of branches of the inverter, and the volume of device greatly reduced. This system consists of a symmetrical six-phase PMSM and a zero-angle six-phase PMSM. The stators windings of both motors were connected in series in appropriate manner. Vector control technology was used to make the motor decouple and achieve independent control of each motor. Fristly, the work principle and series rules of two motors was analyzed, followed by the establishment of themathematical model of the two motors in series. And then the feasibility of the whole system was proved by simulation.【总页数】5页(P17-21)【作者】苗正戈;刘陵顺;张海洋【作者单位】海军航空工程学院研究生大队,山东烟台264001;海军航空工程学院控制工程系,山东烟台264001;海军航空工程学院研究生大队,山东烟台264001【正文语种】中文【中图分类】TM301.2;TM315【相关文献】1.矩阵变换器-永磁同步电机驱动系统滑模变结构控制 [J], 史婷娜;刘立志;王慧敏;宋鹏;夏长亮2.两个整流桥相串联的12脉波整流电路的结构、特点 [J], 俞松尧3.基于不同永磁体结构优化设计的一种混合式永磁同步电机的电磁参数特性对比分析 [J], 何松;马涛;于永军;司纪凯;李开鑫;谭金龙4.基于某款纯电动汽车永磁同步电机不同转子磁钢结构对噪声影响的分析 [J], 陶文勇;姚学松5.车用永磁同步电机的不同转子拓扑结构性能对比及振动噪声分析 [J], 贾梦凡;于冰;唐小春;谭亲目;艾增强;解文龙因版权原因,仅展示原文概要,查看原文内容请购买。
星型联接六相高效异步电动机
[3 常军 , 1] 纪志成. 基于等价输入干扰估计器 的永磁 同步电机速
度 控 制 [ ] 东 南 大 学 学 报 (自然 科 学 版 )2 0 ,8:0 5 . J. ,0 83 5 — 3
[O 韩京清. 1] 自抗扰控制技术 : 计补偿 不确定 因素 的控 制技术 估 [ . M] 北京 : 国防工业 出版社 ,0 8 20 . [ 1 劭立伟 , 1] 廖晓钟 , 张宇河 , 自抗扰 控制器在 永磁 同步电机 等. 作者简介 : 吴正成 (9 7 , , 18 一)男 硕士 , 主要研究方 向为电机非线
。 扣争
。 {
( )Y、 2系列 三 相 电 动 机 ( )星 型 联 接 六 相 高 效异 步 电动 机 a Y b
图 2 定 子 电压 波 形 图
定, 电流小 , 冲击 结构简单, 成本低 , 可靠性高 , 效率高, 9%。 达 O 下面结合 附图和具体实 施方 式对本 设计 作进 一步详 细 的说 明。图 1 为 Y、 2系列三 相 电动机定 子绕 组 图; 1 a Y 图 b
本设 计 的 技术 方 案 为 : 电动 机 包 括 定 子 绕 组 、 行 电 该 运 ( )星型联接六相高效异步电动机 a Y b
图 1 定 子绕 组 图
容、 定子铁心 、 鼠笼转子 、 端盖 、 机壳 和轴承 , 在电动机 定子铁 心上安装 三相 主绕组 与三相 辅助绕 组。本设 计 的星型联 接 六相 高效异步 电动机 , 六相 绕组 与外界运 行 电容 移相 9 。 0 配
效 异 步 电 动机 定 子 电压 波 形 图 。
节能 降耗是人类 的永 久课题 , 其是 发展 中 国家 , 得 尤 显
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图2 正六相电机图3 双三相电机
图5 冗余EPS电机驱动架构
图6 两路下桥臂双电阻采样
图7 双三相电机信号与时序关系图
图8 双绕组三相电机驱动采样时序图
图9 六相电机控制及诊断调度时序图
图10 六相电机驱动功能验证的示波器截图图11 六相电机驱动功能验证的Gliwa T1截图
图12 六相电机驱动及采样功能验证CANape观测图
4 结束语
本文基于六相电机工作原理,从电机控制的驱动输出理论与电机采样时序设计2个方面,阐述在EPS产品中的应用方法,利用单片机内核2个电机控制单元独立双三相PWM定时器输出及定时延迟采样触发时刻的方式,实现了双星型绕组UVW/ XYZ的冗余独立控制,且保证了时序上的同步性。
进一步实验论证了软件运行中,六相电机零电流、相电流、相电压以及RPS传感器相关数据的有效性和设计的合理性。
通过该设计应用将为推进冗余EPS六相电机在未来智能驾驶领域,转向执行器的安全和系统持续助力可用性提供技术保证。