多点定位技术及应用
多点定位系统信号处理流程及假信号处置

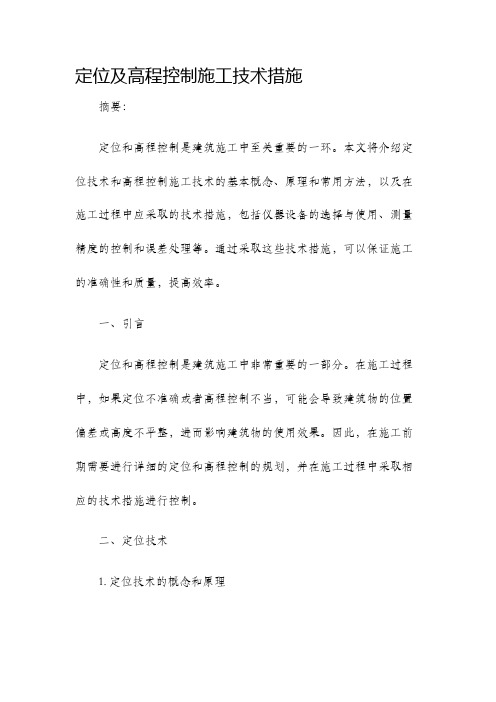
2022年 3月 March 2022Digital Technology &Application 第40卷 第3期Vol.40 No.3数字技术与应用111中图分类号:V35 文献标识码:A 文章编号:1007-9416(2022)03-0111-03DOI:10.19695/12-1369.2022.03.36多点定位系统信号处理流程及假信号处置中国民用航空华北地区空中交通管理局 张孝泽本论文介绍了多点定位系统(MLAT)的基本信息,在技术上讲解了多点定位原理以及系统对信号的处理流程。
针对大兴机场场面上出现不明目标的问题进行了故障分析,为空管技术保障人员提供了相关处理经验。
随着国内航空运输量的不断增长,北京大兴国际机场及其周边区域的飞机数量急剧增加。
高密度的航班架次使得机场场面内飞机与飞机之间、飞机与场面车辆之间的间距减少。
运行中的ADS-B系统(广播式自动相关系统)目标易受机载设备影响,定位偏移频发。
场监一次雷达覆盖有盲区且易受固定目标干扰。
在低能见度或者极端天气运行情况下,利用这两套设备监视场面时,频频发生不明目标侵入跑道的情况。
这对要求高效运行的空管指挥造成了干扰。
航空器安全问题、航班正点问题日益突出,空管单位迫切需要更加先进可靠的监视手段。
多点定位系统(MLAT)针对大兴机场场面的特点进行优化,可以完全覆盖大兴机场本场,扫描更新率快、精度高。
不依赖机载设备定位,可为场监雷达补盲,并同时与其配对,为航空器提供二次标牌。
多点定位系统为塔台管制员提供了更加精准的场面监视[1]。
1 多点定位系统基本信息1.1 系统介绍多点定位系统是一个典型的分布式系统,利用现有机载应答机发射的1090MHz应答信号就可以实现对飞机的定位。
同时对已有的监视设备和机载设备无需改造,也无需在航空器上安装任何额外设备。
多点定位系统接收机可以接收航空器发射的多种应答信号,包括A/C模式二次雷达信号,S模式二次雷达信号和ADS-B信号。
定位及高程控制施工技术措施
定位及高程控制施工技术措施摘要:定位和高程控制是建筑施工中至关重要的一环。
本文将介绍定位技术和高程控制施工技术的基本概念、原理和常用方法,以及在施工过程中应采取的技术措施,包括仪器设备的选择与使用、测量精度的控制和误差处理等。
通过采取这些技术措施,可以保证施工的准确性和质量,提高效率。
一、引言定位和高程控制是建筑施工中非常重要的一部分。
在施工过程中,如果定位不准确或者高程控制不当,可能会导致建筑物的位置偏差或高度不平整,进而影响建筑物的使用效果。
因此,在施工前期需要进行详细的定位和高程控制的规划,并在施工过程中采取相应的技术措施进行控制。
二、定位技术1. 定位技术的概念和原理定位技术是通过各种测量手段确定物体在空间中的位置和方位的技术。
常用的定位技术包括全站仪测量、GPS测量和激光测量等。
定位技术的原理是利用不同的测量原理和仪器设备来实现目标的定位。
2. 定位技术的方法(1)全站仪测量:全站仪是目前广泛使用的一种测量仪器,可以通过仪器上的望远镜和角度测量装置来测量目标的方位和坐标等信息。
(2)GPS测量:GPS是全球定位系统的缩写,利用卫星信号来测量目标的位置和方位。
GPS测量具有无线传输、多点观测和高精度等特点,适用于大范围的定位需求。
(3)激光测量:激光测量利用激光束的反射和探测来确定目标的位置和方位。
激光测量具有高精度和高效率的特点,适用于小范围的定位需求。
三、高程控制技术1. 高程控制技术的概念和原理高程控制技术是通过测量和控制目标的高度和高程变化来实现建筑物的平整和均衡。
常用的高程控制技术包括水准测量和雷达测量等。
2. 高程控制技术的方法(1)水准测量:水准测量是通过测量目标和基准面之间的高度差来确定目标的高程。
水准测量需要使用水平仪和测量杆等仪器设备,具有较高的精确度和稳定性。
(2)雷达测量:雷达测量利用雷达波的反射和接收来测量目标的高程。
雷达测量具有非接触式和自动化的特点,适用于高程变化较大或复杂的场景。
机场跑道入侵及跑道防入侵系统
机场跑道入侵及跑道防入侵系统摘要:机场跑道入侵是全世界民航面临的难题之一,飞行员、管制员和环境等多重因素导致跑道入侵存在一定的发生概率,难以消除。
本文首先归纳了跑道入侵的等级及危害,明确了检测技术和设备应用是防跑道入侵的重点。
对比分析了国际上应用较为广泛的跑道防入侵系统及应用场景。
最后,总结归纳了主要的跑道防入侵关键技术,对跑道入侵的防治具有借鉴意义。
关键词:机场跑道;跑道入侵;防入侵系统引言安全是民用航空永恒的主题。
跑道是机场中最容易发生事故也是事故性质最严重的区域,跑道入侵增加了航空器碰撞的发生概率和危险程度,严重威胁着机场的运行安全[1]。
据统计,从2009年到2011年,我国民航发生跑道入侵事件69起,其中包括4起严重事故,1起一般事故和64起其他不安全事件。
根据2013-2016年美国民用航空的统计数据,跑道侵入的数量每年上升约10%。
2013年至2016年9月,分别发生了1200次、1300次、1400次和1500次;从跑道侵入的责任来看,53%是由飞行员失误造成的,29%是由于管制员失误造成的,17%是由于其他原因造成的。
有鉴于此,跑道入侵是多因素综合造成的,国内外安全形势不容乐观。
防止跑道入侵是全面建成安全高效的现代化民用航空体系的必要一环。
本文在阐述跑道入侵及危害的基础上,明确了检测技术和设备应用是防跑道入侵的重点。
阐述了四种国际上应用较为广泛的跑道防入侵系统,并梳理了各系统的应用场景,最后总结归纳了主要的跑道防入侵关键技术,对目前机场跑道入侵的防治具有一定的参考价值。
1跑道入侵及危害跑道上飞机起降和滑行的速度很高,一旦有物体入侵跑道,很可能发生机毁人亡的重大事故。
美国联邦航空局FAA将跑道入侵定义为在机场上发生的任何下列事件[2]:航空器、车辆、人员或者地面上的物体对正在起飞、着陆的飞机或即将起飞、着陆的飞机造成碰撞危险或导致间隔缩小。
可见,跑道入侵并不是事故,它是可能导致事故的一种危险情况。
WiFi定位技术在室内定位中的应用研究

WiFi定位技术在室内定位中的应用研究随着智能手机的普及和应用的不断发展,人们对于室内定位技术的需求也越来越迫切。
在室内环境中,由于GPS信号受到建筑物遮挡的影响,定位精度无法满足需求。
而WiFi定位技术则以其便捷、准确的特点,成为了解决室内定位需求的一种重要方法。
WiFi定位技术是通过手机或其他终端设备扫描周围的WiFi 信号,获取所处位置的一种定位方法。
具体来说,WiFi定位技术主要包括无线信号指纹定位和信号强度定位两种方法。
无线信号指纹定位是基于WiFi信号在不同位置的特征差异进行定位的。
在建立无线信号指纹定位系统前,首先需要进行离线的训练和数据采集。
采集人员会在待定位的室内环境中设置一定数量的位置节点,然后利用智能手机或其他移动设备进行数据采集。
在数据采集过程中,设备会记录下当前位置节点的WiFi信号信息,包括MAC地址、信号强度等。
通过大量的数据采集和处理,可以建立起环境中不同位置节点的信号指纹库。
在实际定位时,移动设备会扫描周围的WiFi信号,并将扫描到的信号与信号指纹库进行匹配,从而得出当前位置的估计。
无线信号指纹定位技术的优点是定位精度高,但需要进行较为复杂的离线训练和数据采集。
信号强度定位则是根据WiFi信号强度与距离之间的关系进行定位的。
该方法简单直接,无需事先建立信号指纹库,可以实时进行定位。
在信号强度定位中,设备会扫描周围的WiFi 信号,并测量每个信号的信号强度。
根据已有的信号强度与距离的关系模型,可以通过信号强度的测量值估计出当前位置的距离。
然后通过多点测距的方法,可以进一步得到准确的位置估计。
相比于无线信号指纹定位,信号强度定位的过程更简单,但定位精度较低。
WiFi定位技术在室内定位中的应用非常广泛。
首先,在商场和超市等大型室内场所,WiFi定位技术可以帮助用户准确定位自己的位置,并给出相应的导航指引,提高用户的购物体验。
其次,在仓库和物流中心等物流场所,WiFi定位技术可以实现对货物的实时定位和管理,提高物流效率和准确性。
全球定位系统(GPS)在地质测绘中的应用与发展

全球定位系统(GPS)在地质测绘中的应用与发展摘要:本文主要探讨了全球定位系统(GPS)在地质测绘中的应用与发展。
本文介绍了GPS的基本原理和技术特点,然后分析了GPS在地质测绘领域的应用情况,并探讨了GPS技术在地质测绘中的发展趋势。
通过对相关文献的综述和案例分析,本文总结了GPS在地质测绘中的优势和不足,并提出了进一步研究的方向和建议。
关键词:全球定位系统;地质测绘;应用;发展;原理;技术特点;地质构造测量引言地质测绘是研究地球表面地貌和地质构造的重要手段,对于资源勘探、环境保护和灾害防治具有重要意义。
全球定位系统(GPS)作为一种先进的定位技术,具有高精度、高效率和全球覆盖等优点,已经广泛应用于地质测绘领域。
本文将重点探讨GPS在地质测绘中的应用情况和发展趋势。
一、GPS的基本原理和技术特点1.1 GPS的基本原理1.1.1 卫星定位原理GPS系统由一组卫星组成,这些卫星分布在地球轨道上,并以固定的轨道和时间间隔向地面发射信号。
卫星发射的信号包含了卫星的精确位置和时间信息。
接收机接收到多颗卫星的信号后,通过计算信号的传播时间差和卫星的位置信息,可以确定接收机与卫星之间的距离。
通过接收多颗卫星的信号并进行测量和计算,可以得到接收机的三维位置坐标。
1.1.2 接收机定位原理接收机是用来接收卫星信号并进行定位的设备。
接收机接收到卫星发射的信号后,首先进行信号解算,将接收到的信号转换为距离信息。
然后,接收机通过测量多颗卫星信号的传播时间差,并结合卫星的位置信息,进行三角定位计算,以确定接收机的位置。
接收机还可以通过接收更多的卫星信号,进行多点定位和时间差测量,以提高定位的精度和可靠性。
1.2 GPS的技术特点1.2.1 高精度定位能力GPS具有较高的定位精度,通常可以达到几米甚至更小的精度。
这是由于GPS系统中的卫星位置和时钟都经过精确测量和校正,并且接收机可以同时接收多颗卫星的信号进行计算,从而提高定位的精度。
ADS―B系统与多点系统共3页文档

ADS―B系统与多点系统随着航空事业的不断发展,空中交通流量的大幅上升,雷达管制的全面实施,雷达监视越来越成为空中交通管理系统的主要信息来源。
它也是实现空域管理、流量管理的基础。
常用的一次监视雷达和二次监视雷达,由于其费用问题、场地问题、应用问题等,也渐渐不能完全满足现在空中交通管理系统的要求。
那么多点系统以及ADS-B系统的引入,较好的弥补了一、二次监视雷达的不足,满足了当前空域流量的监视需求。
自动相关监视(ADS)技术是新航行系统发展最重要的成果,是国际上解决空中交通管制最有效的办法。
而ADS-B是一种基于全球卫星定位系统(GNSS/GPS)和利用空-地、空-空数据链通信完成交通监视和信息传递的航空器运行监视技术,即航空器通过广播模式的数据链,自动提供由机载导航设备和定位系统生成的数据。
包括航空器识别、方位、高度、速度及意向信息等。
地面和其它航空器可以接受此数据,并用于各种用途,如在无雷达覆盖区域提供ATC监视、机场场面监视以及未来的空-空监视等应用服务。
国际民航组织(ICAO)将其确定为未来监视技术发展的主要方向,目前许多机场已投入使用。
ADS-B(Automatic Dependent Surveillance-Broadcast)是指广播式自动相关监视。
国际民航组织(ICAO)将ADS-B定义为“用于传递飞行参数,如:位置、航迹和速度等,通过数据链广播模式,在特定的间隔时间内发送,任何空地用户都可以申请这一功能”。
ADS-B?包含了以下几层含义:自动(Automatic):数据传送不需要人工操作和地面的询问;相关(Dependent):数据的发送全部基于机载设备;监视(Surveillance):提供的状态数据适用于监视的任务;广播(Broadcast):采用广播方式发送数据,所有用户都可以接收这些数据。
我国已制定出ADS-B推广应用的中、长发展规划。
部分ADS数据链组网可行性试验工程、支持ADS-B的地―空应用基础设施建设已经完成,系列配套工程正有序展开。
基于百度地图的多点导航系统实现

第39卷第6期辽宁工业大学学报(自然科学版)V ol.39, No.6 2019年12月Journal of Liaoning University of Technology(Natural Science Edition)Dec. 2019收稿日期:2019-06-10作者简介:刘丹(1987-),女,江苏淮安人,讲师,硕士。
优先出版地址:/kcms/detail/21.1567.T.20191115.1346.008.html DOI:10.15916/j.issn1674-3261.2019.06.003基于百度地图的多点导航系统实现刘 丹(江苏联合职业技术学院苏州工业园区分院,江苏苏州215123)摘 要:提供了基于百度地图的多点导航系统的设计和实现方案,重点阐述了地图显示、实时定位、地理编码和多点导航功能的实现。
系统采用了安卓系统和百度地图API开发实现,可以满足用户设置多个途经点的导航需求,定制更多个性化的导航路线。
关键词:Android;百度地图;定位;地理编码;导航中图分类号:TP319 文献标识码:A文章编号:1674-3261(2019)06-0359-04Research on Multi-point Navigation Based on Baidu MapLIU Dan(Suzhou Industrial Park Branch, Jiangsu Union Technical Institute, Suzhou 215123, China)Abstract: This paper provides the design and implementation of a multi-point navigation system based on Baidu Map, the implementation of map display, real-time positioning, geocoding and multi-point navigation is emphasized. The system is implemented with Android system and Baidu map API, which can satisfy the navigation needs of users to set up multiple transit points and customize more personalized navigation routes.Key words: android; Baidu map; location; geographic coding; navigation随着社会发展,人们生活水平不断提高,旅游占休闲活动比重日渐上升,逐渐成为国人的“幸福必须品”。
《天文定位原理》课件

三点定位和多点定位
1
三点定位原理和方法
解释三点定位原理和使用三个已知位置进行定位的方法。
2
多点定位的意义和需求
探讨多点定位的优势、应用领域,并解释多点定位在航空和导航中的重要性。
3
多点定位的处理方法和应用案例
介绍多点定位的处理方法和提供一些实际应用案例。Fra bibliotek总结与展望
天文定位的优缺点和适 用范围
总结天文定位技术的优点和局 限性,并讨论其在不同领域的 适用范围。
3
地球磁场定位的误差分析和校正
讨论地球磁场定位中可能存在的误差,并提供校正方法。
天球坐标定位
天球坐标定位原理
解释天球坐标定位的原理,包括赤道坐标和赤经赤纬的计算方法。
天球坐标系统和坐标转换方法
介绍天球坐标系统和坐标转换的方法,包括地平坐标和黄道坐标。
天球坐标定位的方法和仪器
讨论使用经纬仪和光电定位仪器进行天球坐标定位的方法。
《天文定位原理》PPT课 件
天文定位原理是一门关于天文学中各种定位技术的介绍和应用。本课件将详 细介绍太阳定位、星历定位、地球磁场定位、天球坐标定位、三点定位和多 点定位等内容。
简介
定位的概念和意义
介绍定位的定义和在导航和航海领域的重要性。
天文定位的分类和应用场景
将天文定位技术根据不同的特点进行分类,并介绍各类技术在航空、航海等领域的应用场景。
天文定位的未来发展趋 势和前景
展望天文定位技术的未来发展 方向和可能的研究重点。
天文定位在航空、航海、 导航等领域的重要作用
探讨天文定位技术在航空、航 海和导航等领域的应用和重要 性。
星历定位的方法和仪器
介绍使用卫星导航仪器进行星 历定位的方法,如GPS和北斗 系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
多点定位系统关键技术—布站与GDOP影响
多点定位系统关键技术—时钟同步与TOA测量
集中式时钟同步
分布式时钟同步
多点定位系统关键技术—时钟同步与TOA测量
信号脉冲沿TOA测量:
脉冲前沿
检测门限
多点定位系统关键技术—时钟同步与TOA测量
多点定位技术 及应用简介
科研开发中心
徐自励
主要内容
多点定位系统定位原理 多点定位系统关键技术 多点定位系统主要应用 多点定位系统与ADS-B系统的联系
多点定位技术及应用简介
一、多点定位系统定位原理
多点定位原理
TDOA-TSOA定位原理
多点定位技术及应用简介
三、多点定位系统主要应用
多点定位系统主要应用
场面运动监视 航路及进近区域的SSR替代 高度监视(Height Monitoring Unit,HMU) 平行跑道监视(Parallel Runway Monitoring, PRM) ADS-B性能验证 ……
差分匹配滤波-过零点TOA测量:
输入信号脉冲
差分匹配滤波器输出信号波形 差分匹配滤波器
多点定位系统关键技术—目标定位算法
定位方程:
f i ( x, y, z , xk , yk , zk ) = ui = mki − ei , i = 1, 2,..., n
ui
mki
σ P = GDOP * σ toa
Intersection of 2 hyperbolas (bad HDOP)
Intersection of 2 hyperbolas (bad HDOP) - detail
多点定位系统关键技术—布站与GDOP影响
多点定位系统信号功能
雷达信号功能——位置 测量(反欺骗) 通信信号功能——数据 传输
ADS-B信号功能
通信信号功能——数据 传输
敬请各位专家 批评指正
2011年11月9日
测量真值 实测值 测量误差 目标位置
ei
( x, y , z )
( xk , yk , zk ) 传感器几何位置
多点定位系统关键技术—目标定位算法
迭代定位算法 Taylor级数法
算法收敛时,精度高(取决于测量噪声强度) 需要选择迭代初值 多次迭代,效率较低 算法收敛性难以保证(取决于初值选择,TOA测 量精度)
多点定位原理
|d1-d2| =常数
双曲线 - 到两点距离差是常数的点构成的线
三个接收机,就可产生两条双曲线 目标位置是两个双曲线的交点
多点定位技术及应用简介
二、多点定位系统关键技术
多点定位系统关键技术—系统组成
必需部分
接收机 中心站
可选部分
参考应答机(同 步与时间校正) 询问机(有源定 位)
多点定位系统关键技术—布站与GDOP影响
2 2 GDOP ( x, y, z ) = σ x + σ y + σ z2 / σ toa
Intersection of 2 hyperbolas (good HDOP) Intersection of 2 hyperbolas (good HDOP) - detail
闭式定位算法 Chan方法
闭式解,效率高 定位精度相对较差 非线性较强,受观测噪声影响大
多点定位系统关键技术—无源与有源定位 无源定位系统
无需发射询问信号 无需申请发射许可 不占用频率资源 适用于航空器安装ACAS系统以及现有MSSR覆盖区 域目标监视
多点定位系统主要应用
多点定位系统主要应用
多点定位系统主要应用
多点定位技术及应用简介
四、多点定位系统与ADS-B系统 的联系
多点定位系统与ADS-B系统的联系
多点定位系统关键技术—无源与有源定位 有源定位系统
具有无源定位系统的功能 可以询问目标并获得应答信号 通过询问增强对终端区及低空域的覆盖 通过询问提高目标刷新率 改善定位方式(TDOA-TSOA定位)和定位精度
多点定位系统关键技术—无源与有源定位
TDOA定位
A
B
TDOA-TSOA定位