QSZ-400型全断面道砟清筛机简介
轨道碴清筛机说明

“轨道碴清筛机”液压系统
清筛机适用于线路大、中修时的道碴清筛作业。
不拆卸轨枕,即可通过安装于本机上的提碴机构、混碴输送装置、筛分装置、污土输送装置等作业机构及低速走行系统实现对道床的连续清筛作业,可以和物料运输车等其它养路机械组成作业车组。
我公司采用液压新技术、新工艺,使该液压系统具有结构合理、使用可靠、便于保养、维护。
系统的装配及性能应符合GB3766-88《液压系统通用技术条件》.
用液压叠加集成或整体集成技术,将阀件集成一体, 保证系统功能和结构简洁
电机:Y250M-4-B35-55KW
油泵:CBW-F306-ALP
不锈钢油箱总成:500L。
大型养路机械清筛机资料讲解
• 5.5 上道作业
• 5.5.1 进入封锁施工地点后,应立即按规定设置有 关防护信号。
• 5.5.2 清除影响机械作业的各种障碍,组织在计划 清筛范围内进行抽出调高垫片。
• 5.5.3 在封锁天窗内,开挖好连接清筛机水平导槽 和挖掘链所需的导槽坑,导槽坑的要求为:
• 5.1.3 线路两侧建筑物(包括埋设在道床中的 固定物体)至线路中心的距离必须大于等于 2.1米。
• 5.1.4 作业地段线路的曲线半径应大于等于 250米。
• 5.1.5 在无缝线路地段施工,长轨锁定轨温 按TB/T2658.2执行。
• 5.1.6 道床翻浆冒泥严重地段不适合机械清 筛,可进行道床机械换砟作业。5.1.7 清筛 机不能在桥梁及两端桥台范围内、道岔、两 侧铺有硬质路面的道口和人行过道及宽轨枕 线路上作业。
• 长度:沿轨道方向1500毫米在导槽下方的道碴壤积 角小于30度。
• 宽度:5000开挖后需用枕木头支垫
• 深度: 枕下300mm(道床不足300mm时,挖至路基 面)。
• 5.5.4 进入封锁施工地点后,应立即按规定 设置有关防护信号。
• 5.5.4.1 机械准备
• 5.5.4.1.1 程序
• (1)大型机械车列按封锁命令进入封锁区间。 到达作业地段后,各机组解体并到指定地点 就位。
——下放起拨道装置并夹紧钢轨。 ——下放两侧上升、下降导槽。 • a.先连接枕下导槽,再连接挖掘链。 • b.张紧挖掘链。 • c.在曲线超高地段施工时污土输送 带和振动筛。
• e.两侧道碴回填输送带外摆。 • f.启动挖掘链。
大型养路机械清筛机技术介绍
筛分系统
筛分系统是清筛机的重要工作机 构之一,负责对挖掘出来的石砟
进行筛分和分离。
筛分系统通常由振动筛、筛网和 传动机构组成,可以将石砟中的 杂质和小石子筛选出来,保证铁
路轨道的清洁和平整。
筛分系统的筛网通常采用高强度、 高耐磨性和耐腐蚀性的材料制成,
以保证筛分效果和使用寿命。
回填系统
污土处理系统通常由吸污管、污土运输车和污土堆放场组 成,可以将挖掘和筛分过程中产生的污土及时清理和处理, 保证作业现场的整洁和环保。
污土处理系统的吸污管通常采用高强度、高耐磨性和耐腐 蚀性的材料制成,以保证吸污效果和使用寿命。Βιβλιοθήκη 液压和电气系统01
液压和电气系统是清筛机的核心控制系统之一,负责对清筛机的各个工作机构 进行控制和调节。
THANKS
感谢观看
大型养路机械清筛机技术
BIG DATA EMPOWERS TO CREATE A NEW
ERA
介绍
• 引言 • 清筛机技术概述 • 清筛机的结构与功能 • 清筛机的应用与效果 • 清筛机的未来发展与挑战 • 结论
目录
CONTENTS
01
引言
BIG DATA EMPOWERS TO CREATE A NEW
回填
清筛机完成清筛作业后,会将清 洁的道砟回填到轨枕空隙中,并 利用捣固装置对道砟进行捣固,
恢复线路的几何尺寸。
清筛机的种类和特点
大型养路机械清筛机主要分为两类:连续式清筛机和步进式 清筛机。连续式清筛机作业效率高,适用于长距离线路的清 筛作业;步进式清筛机则适用于短距离线路或道岔的清筛作 业。
大型养路机械清筛机具有自动化程度高、作业效率高、对线 路影响小等特点。同时,清筛机还配备了多种安全保护装置 ,确保作业安全可靠。
QQS-300型全断面道碴清筛机的使用与改进
QQS-300型全断面道碴清筛机的使用与改进
张忠勤
【期刊名称】《铁道建筑》
【年(卷),期】2002(000)002
【摘要】叙述洛阳北工务段使用和管理QQS-300型全断面道碴清筛机的情况,并介绍对该机使用中发现的问题进行技术改进。
【总页数】2页(P26-27)
【作者】张忠勤
【作者单位】洛阳铁路分局洛阳北工务段
【正文语种】中文
【中图分类】U2
【相关文献】
1.减少道碴清筛机挖掘链中间体裂纹倾向的研究 [J], 陈亚飞;董雯;陈小华
2.道碴清筛机挖掘链耙板材料ZGSiMnCrMoNiV的研制 [J], 赵晓东;张建国;刘彦和;刘燕明
3.RM80型全断面道碴清筛机作业工况牵引性能计算及匹配方式分析 [J], 程立
4.SRM80全断面道碴清筛机旋转污土带装置常见故障分析 [J], 郭建良
5.RM80型道碴清筛机挖掘链的失效分析及改进策略 [J], 赵晓东;刘燕明;刘彦和;张建国
因版权原因,仅展示原文概要,查看原文内容请购买。
QSZ-450型全断面道砟清筛机简介
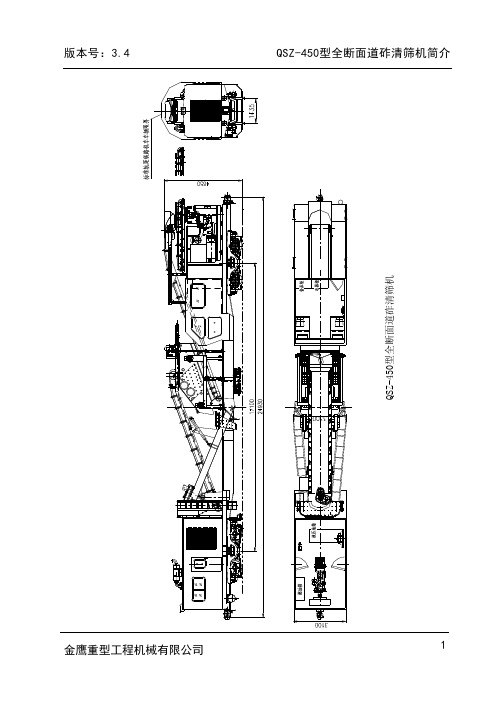
1.概述QSZ-450型全断面道砟清筛机适用于对隧道内的道床及一般线路道床进行大、中修清筛作业,能在不拆解道床上部钢轨与轨枕的情况下,通过轨枕下的挖掘扒链将已脏污的道砟挖起,并通过提升导槽将脏污道砟送进落砟斗,由混砟输送带将脏污道砟送入振动筛进行筛分,筛分后的洁净道砟经过回填砟斗直接回填到轨枕下道床里,污土则通过污土输送带输送至回转输送带,由回转输送带将污土输送到与本机联挂的物料运输车上,在无桥梁和隧道的地段,本机还可将污土抛至线路一侧。
在各工作机构工作的同时,本机通过自走行实现连续作业,完成对线路道床的清筛作业。
本机还可在需全部更换道砟的地段,不通过筛分装置将脏污道砟全部抛至线路一侧或输送到物料运输车上。
QSZ-450型全断面道砟清筛机外观该车具有以下技术特点:1.1.转向架采用利诺尔减振器减振,并采用弹性旁承,最高运行速度120km/h,整车具有良好的运行稳定性和平稳性。
1.2挖掘机构采用液压马达驱动,过载能力强,设有四档挖掘链速。
挖掘机构见图6所示。
挖掘扒链设四档链速,作业时可根据道床阻力进行选择,以获得最佳的作业效率。
挖掘链轮采用悬臂方式安装,更换方便。
挖掘扒链导轮采用集中注油方式润滑,作业过程中可以很方便地在副司机位给每个导轮注油。
1.3.振动筛为一体结构,采用侧板式振动电机,筛内具有较高的净空,通过能力强。
设调平机构。
出砟口设分砟装置。
挖掘机构外形1.4.液压系统主要的液压元件及管件均采用进口件。
液压油箱采用不锈钢制作,液压阀采用阀块集成安装,设有直流电机驱动的应急油泵,在主液压系统出现故障时,可用于机构复位。
1.5.本机设有压缩空气系统,利用该系统,本机安装有旁路制动系统,与液压制动一起形成双保险,保证作业安全。
筛分装置外形液压泵站外形1.6.回转输送装置可作±180°旋转。
回转输送装置外形1.7.设有隧道清筛功能选项,通过使用基本底梁,拆换拢砟板,并采用小挖掘扒链,可获得3500mm的挖掘宽度,用于在隧道内作业。
QS1200全断面道砟清筛机筛分车新型调平装置的研究
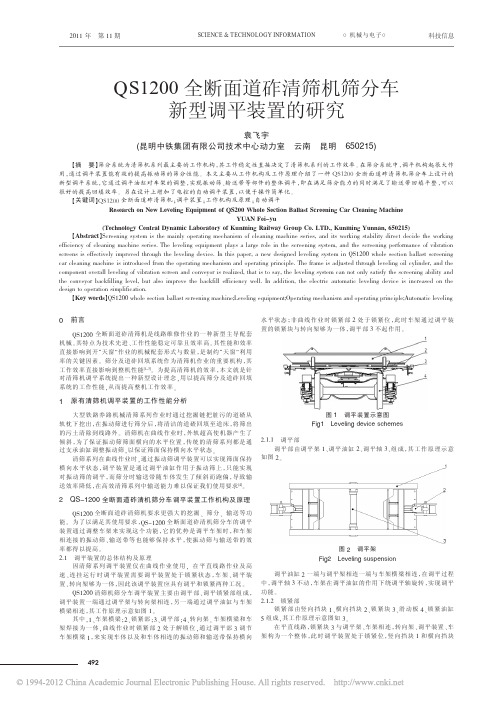
在平直线路,锁紧块 3 与调平架、车架相连,转向架、调平装置、车 架构为一个整体,此时调平装置处于锁紧位,竖向挡块 1 和横向挡块
492
科技信息
○机械与电子○
SCIENCE & TECHNOLOGY INFORMATION
2011 年 第 11 期
2 连接,防止锁紧块脱出;在曲线上,竖向挡块 1 在转轴的作用下与横 向挡块 2 分开,锁紧块 3 在锁紧油缸 5 的作用下与转向架、车架分开, 调平装置在调平油缸的作用下根据测量曲线的不同情况自动调整。
每个心盘受力 Pcp =0.5* (68×9.81-22.5×4)=288.5kN
5 结语
图 4 车辆通过最大超高曲线示意图 Fig4 Vehicles through the biggest ultra-high curve schemes
其中L1 为整车重心离心盘中心的横向距离,L2 为油缸作用在车架 点离心盘中心的横向距离。
L1=(1807-649)×tan(6°)=121mm QS1200 清 筛 机 筛 分 车 转 向 架 4 个 弹 性 旁 承 2 个 球 面 心 盘 承 载 , 旁承的刚度为 K1=2.5kN/mm,旁承压缩量为 F1=9mm;心 盘 摩 擦 副 摩 擦 系数 μcp=0.25,旁承横向跨距 2bs=1.52m 3.1 转向架旁承受力分析: 每个旁承受力 PSB=K1×F1=2.5×9=22.5kN 3.2 转向架心盘的受力分析:
2011 年 第 11 期
SCIENCE & TECHNOLOGY INFORMATION
○机械与电子○
全断面道砟清筛机PLC控制系统研究与设计

me h d o h s p p ri v r o d,h n a o to r b e s l t n p o i e o d t o o al y ma n e a c c i — t o ft i a e s e y g o t ema u l n r lp o lm o u i r v d s a g o o l r r i c o f wa i t n n ema h n
o c a iain, u h ign c iea pid t h als ,ce nn ft eQS 6 0b l s ce ns a ie ign e fme h nz t o b ttedg ig ma hn p l ot eb l t s re ig o h -5 al ts re c rf rdg ig d — e a a i
分的 QS 5 一6 O道砟 清 筛机 的挖掘 装置操 作还 是 手动控 制 , 筛机 驾 驶 员操作 不方便 , 清 不灵 活 。应 用 P C L 控 制挖 掘 装置 实现各 种规 定 的动作 , 以减 轻操 作 人 员劳动 强度 , 高 劳动 生 产 率 , 证 工作 区间 安 全 。 可 提 保
Ab ta t D u i w e t - r tc n u y, aloa fourc sr c : rng t n y f s e t r r ir d o oun r s g t n s e d r ii i t yha ote p e — asng.R al y r arng e e e hee a iwa ep ii ntr d t r
c ntolt e e a a i e ie f he r gulr p oc s i g mov m e s c n to y s v t ne gy ofo r tn t f , uta s o r h xc v ton d v c ort e a r e sn e nt a no nl a e he e r pe a i g s a f b lo e a e t or ng e fce c nd s f t fw o kig pr e sng Thi a ri r du e h pp ia i nh nc hew ki fii n y a a e y o r n oc s i . s p pe nt o c d t e a lc ton ofPLC n hyd a lc i r u i c nt o ort xc va in e c o s r e c rfe nd a lt PLC ogr m d sgn w a s o r lf he e a to d vie f c e n s a iir a l he pr a e i s hown n de al . The es a c i t is r e r h
大型养路机械的现状和发展分析及如何提高施工和维修效率
大型养路机械的现状和发展分析及如何提高施工和维修效率大型养路机械的现状和发展分析及如何提高施工和维修效率摘要:随着铁路事业的整体进步,大型养路机械在我国铁路线路基础设施维修中的作用日益凸显,文中介绍了我国铁路大型养路机械发展历程和几种主要铁路大型养路机械设备, 论述了大型养路机械施工作业中在运输组织配合方面应解决的几个关键问题,从业务管理、设备管理和现场管理三个方面找出效率损失的原因,提出相应对策建议,并对养路机械的发展前景谈了一些看法。
关键词:铁路;养护;大型养路机械;运输组织;施工;效率1 引言在列车长时间运行和自然条件作用下,铁路线路会不可避免地发生变形或损坏。
为了确保列车安全、平稳、快速运行,延长线路各组成部分的使用寿命,必须加强线路的养护和维修工作,使线路设备经常保持良好状态。
上世纪60年代以前,我国的铁路养护主要是依靠人力,劳动强度大,工作效率低,作业质量不高。
随着铁路事业的发展,铁路养护开始在工作中使用小型机械,这些设备的使用,不仅提高了作业效率,而且减轻了养路工人的劳动强度。
为了适应发展步伐,工务段普遍设立了机械化工队和养路工区,配备了以单项、小型为主的养路机械。
进入80年代之后,随着我国铁路运输密度的加大,繁忙干线的维修工作采用手工、小型养路机械和非标准自制设备的修理手段已无法完成。
与此同时,轨道结构的日益现代化也向养路机械的作业质量提出了更高的要求。
在这种形势下,我国铁路养护走向大型机械化。
2 我国铁路大型养路机械发展历程20世纪80年代,我国铁路进入现代化铁路的发展阶段,仅仅采用小型养路机械进行线路养护维修作业已不可能保证作业质量和安全。
在这种情况下,人们对发展养路机械化工作在观念上发生了重大突破,即:铁路高速重载的发展需要养路机械化的支持;养路机械化装备需要很大的投入;养路机械化需要合理的封锁天窗;高技术的养路机械需要现代化的管理等等。
这些共识为养路机械化工作的持续发展提供了良好基础,也正是这些观念突破促使铁道部在上世纪末、本世纪初进行了有效的、影响深远的铁路修制改革。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.概述
QSZ-400型全断面道砟清筛机适用于铁道线路大、中修清筛作业,能在不拆解道床上部的钢轨与轨枕的情况下,通过轨枕下的挖掘扒链将已脏污的道砟挖起,并通过提升导槽将脏污道砟送进落砟斗,由混砟输送带将脏污道砟送入振动筛进行筛分,筛分后的洁净道砟经过回填砟斗直接回填到轨枕下道床里,污土则通过污土输送带抛送到线路一侧。
在各工作机构工作的同时,本机通过自走行实现连续作业,完成对道床的清筛作业。
QSZ-400型全断面道砟清筛机外观
2.适用环境
海拔高度≤3000m(海拔高度超过1500m需修正发动机功率)环境温度-10℃~+50℃
限界符合GB146.1-1983标准轨距铁路机车车辆限界
轨距1435mm
3.整车主要技术参数
清筛作业效率400m3/h
抛砟作业效率300m3/h
最小作业曲线半径250m
最小运行曲线半径120m
最大坡度33‰
最大外轨超高180mm
转向架轴距2000mm
转向架中心距14910mm
车轮直径840mm
车钩型式13B下作用式车钩
缓冲器ST型缓冲器
车钩中心线高度(距轨面)880±10mm
外形尺寸(长×宽×高)21890mm×3300mm×4650mm 整车重量75t
联挂最高运行速度100km/h
发电机组额定输出功率300kW
作业走行速度0~440m/h
作业牵引力160kN
4.作业机构主要技术参数
4.1.挖掘机构
最大挖掘能力460m3/h
挖掘电机功率75kW×2
挖掘宽度3900mm、4200mm、4400mm
最大挖掘深度(轨面以下) 850mm
挖掘链速 3.2m/s
4.2.筛分装置
最大筛分能力550m3/h
振动电机数量4台
振动电机功率6kW×4
振动电机单台激振力0~75kN
双振幅8~11mm
第一层筛网网孔尺寸40mm×40mm
第二层筛网网孔尺寸20mm×20mm
4.3.混砟输送装置
带宽1000mm
电动滚筒功率18.5kW
带速 3.2m/s
输送能力500m3/h
4.4.污土输送装置
带宽800mm
电动滚筒功率 5.5kW
带速 6.0m/s
输送能力400m3/h
4.5.提轨装置
最大提轨高度120mm
最大提轨力200kN
5.主要结构特点
QSZ-400型全断面道砟清筛机采用电气传动与液压传动、电气控制和气动控制相结合的技术,整机主要由主车架、转向架、车轴齿轮箱、司机室、机器间、制动系统、电气系统、液压系统、提砟机构、提轨装置、混砟输送装置、混砟落砟斗、筛分装置、污土输送装置、回填砟斗、柴油发电机组等组成,并设有排砟装置、底梁起重机、压缩空气系统、工具箱等附属设施。
主要结构介绍如下:
5.1.主车架和转向架
主车架采用低合金钢焊接结构,具有足够的强度和刚度。
转向架为焊接构架,轴距2000mm,采用变摩擦减振器和导框定位方式,心盘和旁承共同承载,并采用滑槽式制动梁结构,具有结构刚度大,重量轻,维修空间大,运行稳定性好的优点。
5.2.发电机组
发电机组额定输出功率为300kW,采用康明斯KTA19-G2型电站用水冷柴油发动机,持续功率为336kW,具有可靠性好、油耗低、短时过载能力强的特点,能满足清筛机起动和作业工况的需要。
在发动机空滤器进气口安装有旋风除尘装置,可满足在粉尘较多的环境下工作的要求。
为方便发动机冷却水的加注,设置有电动上水装置。
5.3.提砟机构
提砟机构采用两台绕线式异步电动机驱动,单台功率为75kW,采用频敏电阻起动,并设有过载保护系统,起动平稳,挖掘力大,作业效率高,在作业过程中遇大块石头或其它障碍物超载时可自动停机。
挖掘扒链、导槽内衬板均采用耐磨合金钢,挖掘扒链、导轮、耐磨板等易损零部件更换非常方便。
通过使用挖掘底梁及在其上安装加长底梁,可获得3900mm、4200mm和4400mm三种作业宽度,以适应不同的作业要求。
设有导轮润滑脂气动加注系统,操纵手柄位于操纵台副司机位,可方便地给每一个导轮加注润滑脂。
5.4.筛分装置
筛分装置具有激振力大,通过能力强的特点。
振动筛为一体结构,采用两层筛网;筛网采用圆钢上下搭接制造,使用寿命长,同时维修更换方便。
筛网网孔尺寸可根据用户要求制造。
筛分装置在电气系统中设置了快速停止装置,使振动筛在停机后能迅速消振,从而避免了对机件的损坏。
筛分装置设有机械锁定机构和液压调平机构,以适应高速运行和曲线区段作业的需要。
5.5.电气系统
电气系统主要由柴油发电机组、工作电路、操作控制显示电路、配电箱、控制台、交流电动机、直流电动机、蓄电池、电磁阀以及电器仪表和电气元件、照明设施等组成。
可根据用户要求安装空调。
操作控制系统能控制作业机构顺序起动和顺序停机,以保证作业的安全性。
主要的电气控制元件选用西门子(SIEMENS)和施耐德(SCHNEIDER)等国际名牌产品,性能优越,使用可靠。
显示装置设在操纵台上,能显示挖掘电机电流、作业机构动作情况等信息,同时,操作室内还设有电气、机械故障自动声光报警装置。
在正副司机位和车下两侧均设有紧急停止按钮,在紧急情况下按下该按钮使整个系统停止工作。
车下和车顶均设有作业照明灯,能满足在夜间作业的要求。
5.6.液压系统
液压系统主要由工作液压系统和走行液压系统组成,分别由电动机驱动工作油泵和走行油泵提供压力油,其中走行液压油泵采用机械变量泵,通过操纵位于主司机位的手柄改变该泵排量可实现作业走行无级调速。
液压系统中设有溢流阀、液压锁等安全保护阀件,保证了系统工作安全可靠。
此外,还设有直流电机驱动的应急油泵,在主液压系统出现故障时,可用于机构复位。
5.7.走行传动系统
本机低速作业走行采用四台液压马达分别驱动四根车轴,所有液压马达的挂上、脱开及锁定均通过液压油缸控制。
操纵台上有指示灯可显示马达的挂上与脱开状态。
5.8.制动系统
本车设有空气制动、停车手制动及液压制动。
空气制动系统包括104型客车分配阀、副风缸、制动缸等,具有在一定范围内制动力不衰减的特性,有利于在长大坡道区段使用。
设有一套手制动机,用于停车制动。
液压制动系统由电磁换向阀、液压油缸、制动开关组成,用于液压低速走行时的整车制动,从而保证了作业走行的可靠性。
5.9.操作司机室和机器间
操作司机室和机器间均采用矩形钢管焊接骨架结构,操作司机室骨架内填隔音、隔热材料,外蒙钢板,内部采用多孔铝板装修,机器间外蒙钢板,内部喷涂阻尼胶,侧窗为双层推拉式结构,所有玻璃均为安全玻璃。
操作司机室内布置有两把可调节的真皮司机
椅、两张床铺(上下布置)、一个文件柜。
5.10.附属装置
本机设有各种附属装置,为本机的使用提供了方便,如排砟装置,具有清扫轨面道砟的作用;底梁起重机,用于装卸、存放挖掘底梁,可减轻现场作业人员的劳动强度;配备有压缩空气系统和橡胶软管,便于作业结束后清扫灰尘;工具箱,方便现场存放各种作业工具。