VMSENS VM-i三维运动姿态测量系统--说明书(中文版)
VMM影像测量软件

前言感谢您选用本公司测控系统感谢您使用本公司精准测控系统, 感谢您对我们工作的支持! 对精密计量事业的支持! 我们会继续努力, 竭尽全力的为您服务, 在软件的测量性能和测量方法上推陈出新, 以答谢您的厚爱。
为了回报客户,我们将以一流的品质、完善的售后服务、高效的技术支持帮助您建立自己的测控系统。
用户手册的用途用户通过阅读本手册,能够了解测控系统的基本结构,正确安装整套系统工程,完成系统的基本调试。
本手册包括软件的概要和操作说明。
在初学阶段, 它是一本关于影像测量仪的教程,帮助您学习、导入使用;在日常的使用与解决具体问题阶段,它是一本工具书,您可以通过目录作为索引, 快速查找您要解决的问题。
希望通过本手册能对您有所帮助, 在仪器的操作上让您尽快的进入状态, 享受测量计算机化所带给您的便利和快捷,减轻您的工作负担,提高质量管理能力。
※注意:本手册是以VMA系列为基础对整套系统进行详细说明,其余系列如VME、VMM系列均是在VMA系列基础上删减部份功能。
1.1 简介本套系统综合了机器视觉、精密光机、精密测量算法等技术。
广泛应用于电子、军工、模具、橡胶、塑胶制品、五金、刀具、弹簧、汽车零件及教学、科研、产品研发等领域。
软件特点:拥有超强及完善的2D几何测量功能和CNC自动控制功能。
适合用于解决批量工件或复杂尺寸之检测效率;强调快速、精准;品质保证。
提供影像截取、对比、校正、补偿、自动寻边、自动取点、自动对焦、智能学习等功能。
针对重复工件的测量具有记忆、学习、自动编程的功能,快速准确的现场实时测量。
1.2 测控系统型号及含义软件版本测量方式控制方式驱动器适用仪器VMD 系列手动手动无金相显微镜VMM 系列自动手动无手动型影像测量仪VME 系列自动自动步进电机二次元影像测量仪VMA 系列自动自动伺服电机二次元影像测量仪1.3 测控系统的基本组成精准测控系统并不是仅仅一个软件而已,它包括一定的硬件系统才能发挥软件的功能,一套完善的测控系统应包括如下组成部分:测量软件__________︱_________| | | |视频采集 CNC控制器 数据采集 光源控制器 | | | |视频信号 控制信号 光栅尺信号 光源信号 1.4 计算机的配置要求1.4.1 硬件要求最低配置:CPU:Celeron 2.0GHz内存:256 MB独立显卡:显存 64 MB硬盘:800MB 空间显示器:支持1024*768 平面直角显示推荐配置:CPU: Pentium4 2.4GHz内存:512 MB独立显卡:显存 128MB硬盘:800MB 空间显示器:支持1024*768 平面直角显示1.4.2 操作系统要求精准测控系统支持Windows 2000/XP简体中文操作系统,需要安装DirectX8.0及以上版本的软件;如果要在英文、繁体等其它语言版本的Windows操作系统中安装精准测控系统,则需要选择软件的专业版本。
空间三维动态目标检测及姿态识别系统详细配置

空间三维动态目标检测及姿态识别系统详细配置序号名称型号性能单位数量1 嵌入式高性能图像处理器V6000嵌入式工业图像处理,紧凑,坚固,抗震,支持intel高性能处理器,超强图像数据处理和强大的运算能力,广泛的机器视觉工业现场及科研应用。
套 12 高精度高灵敏度数字摄像机VS078SF1024X768,30帧/S,高灵敏度数字摄像机,可通过外部信号触发采集或连续采集实时图像数据,用于图像采集处理、航空航天等领域个23 高精度高像素镜头M0814-MP 高精度、无畸变、失真率非常小个 24 高速数字图像数据采集卡和数据线VS-1394 dual超高速度实时传输数据,配套VS-078SF使用块 25 双目视觉标定板MV-SB320特征圆成陈列分布,间距30mm、板子尺寸:300X300mm.用特征圆的圆心坐标进行标定块16 高精度视觉云台MV-5959旋转角度:前后俯仰:-36°~ +36°水平旋转:-157°~157°分辨率:0.0129°,提供二进制指令集、软件开发包(SDK),可进行二次软件开发1 个7 高精度视觉云台控制器MV-C5959 VS-5959使用 1 个8 二维移动机器视觉平台VS-XY300平台尺寸:140mm*140mm运动距离(行程)X轴:180mm,Y轴:180mm运动速度(MAX)X轴:20步/Sec,Y轴:20步/Sec机器视觉运动控制实验开发平台可利用其集成了图像采集模块,光源照明模块,运动控制模块,提供了的丰富的运动控制函数进行二次开发,无需复杂编程,就可搭建自己的机器视觉运动控制系统,解决现代工业产品生产过程中涉及的各种各样视觉问题,实验平台结构开放,提供扩展接口。
1 套9 运动控制卡MV-MCC04 配套VS-XY300使用 1 个10 运动控制盒MV-MCB(XY)配套VS-XY300使用 1 个11软件及使用光盘软件开发安装光盘,配套VS-XY300使用 1 个12 双目视觉物体标定及测量系统开发平台CCAS系统操作方便简洁;●标靶特征圆精度0.01mm●能够现场实现标定;●特征圆检测精度0.02像素●标定残差小于0.1像素;●具有非常高的测量精度;系统各模块可方便修改;●具有强大的帮助系统;●可根据用户需求对API函数进行扩展;相机配套使用1 套13 空间目标姿态识别跟踪系统软件VS230系统主要功能1、双目立体视觉大范围标定;2、双目立体测量;3、双目多目标匹配;4、目标姿态识别及轨迹描述;5、测量数据通过串口输出;6、测量精度可调,≦2mm;7、测量速度≥2次/秒;8、系统有自学习功能,且学习过程操作简单;9、系统具备局域网间通讯功能。
NexiusZoom (EVO)立体显微镜产品说明书
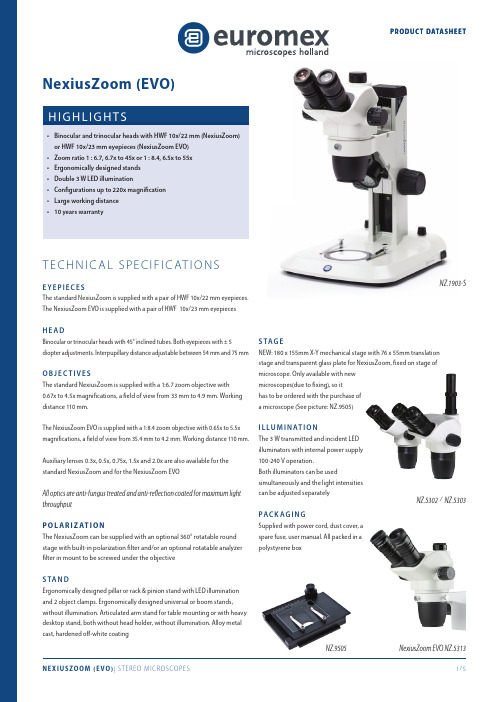
NZ.1903-SBinocularTrinocularPillar standRack & pinion standUniversal standBoom standArticulated arm standWeight (kg)NZ.1702-P ••5.0NZ.1702-S ••4.9NZ.1702-U ••15.6NZ.1702-B ••22.1NZ.1702-A ••8.6NZ.1703-P ••5.2NZ.1703-S ••5.1NZ.1703-U ••15.7NZ.1703-B ••22.2NZ.1703-A••8.7M O D E L S N E X I U S Z O O M E V O 0.65-5.5 (W F10X /23M M )BinocularTrinocularPillar standRack & pinion standUniversal standBoom standArticulated arm standWeight(kg)NZ.1902-P ••5.0NZ.1902-S ••4.9NZ.1902-U ••15.6NZ.1902-B ••22.1NZ.1902-A ••8.6NZ.1903-P ••5.2NZ.1903-S ••5.1NZ.1903-U ••15.7NZ.1903-B ••22.2NZ.1903-A••8.7M O D E L S N E X I U S Z O O M 0.67-4.5 (W F10X /22M M )M AG N I F I C AT I O N SNexiusZoom standard & ESD Working distance and field of view with standard HWF 10x / 22 High Wide Field eyepiecesZoom indicationObjective 1x (standard)Working distance 110 mm Auxiliary lens 0.5x Working distance 165 mm Auxiliary lens 0.75x Working distance 120 mm Auxiliary lens 1.5x Working distance 45 mm Auxiliary lens 2x Working distance 30 mm TotalMagnificationsField of view in mmTotalMagnificationsField of view in mmTotalMagnificationsField of view in mmTotalMagnificationsField of view in mmTotalMagnificationsField of view in mm0.67 6.732.8 3.3565.7 5.043.810.121.913.416.40.77.031.4 3.562.9 5.341.910.521.014.015.70.88.027.5 4.055.0 6.036.712.018.316.013.81.010.022.0 5.044.07.529.315.014.720.011.01.515.014.77.529.311.319.622.59.830.07.32.020.011.010.022.015.014.730.07.340.0 5.53.030.07.315.014.722.59.845.0 4.960.0 3.74.040.0 5.520.011.030.07.360.0 3.780.0 2.84.545.04.922.59.833.86.567.53.390.02.4NexiusZoom EVO Working distance and field of view with standard HWF 10x / 23 High Wide Field eyepiecesZoom indicationObjective 1x (standard)Working distance 110 mm Auxiliary lens 0.5x Working distance 165 mm Auxiliary lens 0.75x Working distance 120 mm Auxiliary lens 1.5x Working distance 45 mm Auxiliary lens 2x Working distance 30 mm TotalMagnificationsField of view in mmTotalMagnificationsField of view in mmTotalMagnificationsField of view in mmTotalMagnificationsField of view in mmTotalMagnificationsField of view in mm0.65 6.535.4 3.2570.8 4.947.29.823.613.017.70.77.032.9 3.565.7 5.343.410.521.914.016.40.88.028.8 4.057.5 6.038.312.019.216.014.41.010.023.0 5.046.07.530.715.015.320.011.51.515.015.37.530.711.320.422.510.230.07.72.020.011.510.023.015.015.330.07.740.0 5.83.030.07.715.015.322.510.245.0 5.160.0 3.84.040.0 5.820.011.530.07.760.0 3.880.0 2..94.545.0 5.122.510.233.8 6.867.5 3.490.0 2.65.555.04.227.58.441.35.682.52.81102.1NZ.1902-UNZ.1902-P100330 450360º360º340º310max1.000 maxFrom 0 to 295 max40NZ.1902-ANZ.1903-BNZ.1902-SNZ.1903-P-ESDNZ.1903-U-ESDNZ.1903-P-ESDE S D S AF E M O D E L SBinocularTrinocularPillar standRack & pinion standUniversal standBoom standArticulated armstandAntistatic ESDWeight (kg)NZ.1902-P-ESD ••• 5.0NZ.1902-S-ESD ••• 4.9NZ.1902-U-ESD •••15.6NZ.1902-B-ESD •••22.1NZ.1903-P-ESD ••• 5.3NZ.1903-S-ESD •••5.1NZ.1903-U-ESD •••15.7NZ.1903-B-ESD•••22.2NexiusZoom ESDEuromexMicroscopenbv•Papenkamp20•6836BDArnhem•TheNetherlands•T+31(0)263232211•F+31(0)263232833•****************•ACCE SS O R I E S A N D SPA R E PA R T SNZ.5302 NexiusZoom binocular head with eyepieces NZ.5303 NexiusZoom trinocular head with eyepieces NZ.5312 NexiusZoom EVO binocular head with eyepieces NZ.5313 NexiusZoom EVO trinocular head with eyepieces NZ.6010 Pair of HWF 10x / 22 mm eyepieces NZ.6015 Pair of HWF 15x / 16 mm eyepieces NZ.6020 Pair of HWF 20x / 12 mm eyepiecesNZ.6110 HWF 10x / 22 mm eyepiece with micrometerNZ.6210 Pair of HWF 10x / 23 mm eyepieces (only suitable for the EVO)NZ.6099 Pair of eyecupsNZ.8903 A uxiliary lens 0.3x (not suitable for NZ.1902-S, NZ.1903-S, NZ.1902-S-ESD and NZ.1903-S-ESD)NZ.8905 A uxiliary lens 0.5x. Working distance 165 mm (not suitable forNZ.1902-S and NZ.1903-S)NZ.8907 Auxiliary lens 0.75x. Working distance 120 mm NZ.8915 Auxiliary lens 1.5x. Working distance 45 mmNZ.8920 A uxiliary lens 2.0x. Working distance 30 mm (not suitable forNZ.1902-S and NZ.1903-S)NZ.8950 Protection glass for NexiusZoom headNZ.9010 E rgonomic rack & pinion stand with transmitted and incident LEDilluminatorsNZ.9015 E rgonomic pillar stand with transmitted and incident LEDilluminatorsNZ.9020 Universal (single arm) stand without NexiusZoom head holder NZ.9030 Boom (double arm) stand without NexiusZoom head holder NZ.9090 NexiusZoom head holder (for NZ.9020 and NZ. 9030)NZ.9025 A rticulated arm stand with table clamp |(without NexiusZoomhead holder)NZ.9027 A rticulated arm stand with heavy stand (without NexiusZoomhead holder)NZ.9081 NexiusZoom head holder (for articulated arm stand NZ.9025)NZ.9520 P olarization kit for NexiusZoom: 360° rotatable round stage withbuilt-in polarization filter (NZ.9524) + analyzer in mount to be screwed under head (NZ.9525)NZ.9524 360° rotatable round stage with built-in polarization filter forNexiusZoomNZ.9525 360° rotatable analyser in mount to be screwed under head ofNexiusZoomAE.5168-NZ Heating stage with PID controller up to 50oC NZ.9950 Standard opaque stage plate NZ.9956 Black/white stage plate NZ.9570 Pair of object clamps for stageNZ.9572 Adjustable GEM object clamp for NexiusZoom (EVO)NZ.9833 C -mount adapter with 0.33x lens for 1/3” cameras (suitable fortrinocular models)NZ.9850 C -mount adapter with 0.5x lens for 1/2” cameras (suitable fortrinocular models)50.876 Dark field attachmentAE.5130 U niversal SLR camera adapter with 2x projection lens for23.2 mm tubes. Need T2 adapterAE.5025 T2 adapter for Nikon D digital SLR camerasAE.5040 T 2 adapter for Canon EOS digital SLR camerasOther T2 adapterson requestLE.1974 R ing illuminator with 72 LEDs with adjustable light intensity.External mains adapter 100-240 V. With segment controller. Brightness of 21.000 Lux at height of 100 mm and color temperature of 6.500K. Mounting diameter between 25-61 mmLE.1973 R ing illuminator with 144 LEDs with adjustable light intensity.External mains adapter 100-240 V. With segment controller. Brightness of 23.000 Lux at height of 100 mm and color temperature of 6.500K. Mounting diameter between 25-61 mmAE.1112 O bject micrometer 50 mm (divided in 500 parts on glass slide76 x 26 mm)。
VMSENS iVM-w无线惯性三维运动姿态追踪测量系统--说明书(中文版)

iVM-w是VMSENS公司提供的基于MEMS技术的低成本的、高性追踪测量系统。
VMSENS iVM-w无线惯性三维运动姿态追踪测量系统欧拉角表示的零漂移、无累计误差的三维姿态数据,以及三维空间内强度等信息,是首个为满足人体运动科学研究、虚拟现实等需要运动踪与测量设备。
基本指标:惯性传感器与地磁传感器工作续航时间:4.5~5小时3D运动目标的追踪显示硬件系统1、4套iVM-w惯性运动追踪单元2、1套运动追踪数据收集器3、魔术贴捷联安装系统运动自如1、完全无线数据传输,没有电缆困扰2、方便拆卸,易于搬运3、没有光线要求的运动追踪4、使用地点无限制,可以在户外、办公室内使用无需专用实验室或专用环境。
易于使用1、方便的魔术贴捷联系统,使得安装部署轻而易举2、易于使用的PC的管理软件,可以实时查看运动追踪数据3、完备的软件开发支持,以及开放源代码实例,使得开发更加容易4、采用通用Micro-USB充电,使用更加便捷5、长达5个小时的使用时间,使用时间更加长久6、提供丰富灵活的软件开发编程接口以及开放源代码实例,开发更加便捷性能表现VMSENS iVM-w无线惯性三维运动姿态追踪测量系统内置运动姿态传感器与辅助测量设备,通™空间状态数据融合算法,实现实时高精度的姿态测量,通过VMSENS公司对不同运动模式的的运动状态设定使用环境,更加切合多种不同的应用场合需求1、高精度的运动追踪与可靠的无线传输2、高精度360 度全方位运动姿态输出3、基于IEEE 802.15.4无线数据传输协议开发4、快速动态响应与长时间稳定性(无漂移,无积累误差)5、全固态集成的 MEMS 惯性器件,高度集成的三轴加速度、角速率和磁场强度计相结合6、快速更新率输出模式(四元数、欧拉角、DCM旋转矩阵、传感器数据)软件开发包( SDK)1、COM-Object组件和 DLL API 应用程序开发接口(适用Windows平台C++/ C#/ Java/VB2、Matlab/ Labview交互接口3、VMSENS Low Level Communication Lib(适用嵌入式平台设备)4、VMSENS SDK应用开发实例源代码5、VMSENS Multi-Motion Tracker System6、MMTS是一款针对VMSENS的无线运动姿态测量产品的图形化管理软件,通过MMTS配合VM 可以很轻易的读取,存储和显示实时的姿态数据,并且运动数据可以通过多种可视化的图形发人员。
3D仿真机器人系统使用说明

纳英特机器人3D 仿真系统用户手册V1.2杭州纳英特电脑电子工程有限公司目录1. 软件简介 (3)2. 软件的安装 (5)2.1. 安装中的其他问题 (6)2.2. 关于D IRECT X (6)2.3. 卸载 (7)3. 软件界面 (8)3.1. 系统主菜单 (8)3.2. 快速启动 (9)3.3. 进入仿真 (10)3.3.1. 机器人组队设置 (10)3.3.2. 控制程序的编辑 (11)3.3.3. 机器人场地合成 (11)3.3.4. 仿真运行 (11)3.4. 机器人搭建 (14)3.4.1. 基本操作 (15)3.5. 场地编辑 (16)3.5.1. 界面说明 (16)3.5.2. 场地属性设置 (17)3.6. 灰度传感器属性设置 (18)3.7. 红外传感器属性设置 (18)3.8. 指南针属性设置 (18)3.9. 马达属性设置 (18)4. 程序编辑器的使用 (19)4.1. 基本操作 (19)4.2. 模块说明 (20)4.2.1. 执行器模块库 (20)4.2.2. 程序模块库 (26)5. 技术支持 (30)1. 软件简介NSTRSS 是NST 科技新近推出的一款以.NET 平台为基础,使用Microsoft DirectX9.0 技术的3D 机器人仿真软件。
用户通过构建虚拟机器人、虚拟环境,编写虚拟机器人的驱动程序,模拟现实情况下机器人在特定环境中的运行情况。
NSTRSS 与市面上的同类产品相比,它具有如下的特点:1.全3D 场景。
用户可自由控制视角的位置,角度,甚至以第一人称方式进行场景漫游。
2.逼真的仿真效果。
采用虚拟现实技术,高度接近实际环境下的机器人运动状态,大大简化实际机器人调试过程。
3.实时运行调试。
运行时,依据实际运行情况,调整机器人参数,帮助用户快速实现理想中的效果。
4.自由灵活的机器人搭建与场地搭建。
用户可自由选择机器人及其配件,进行机器人搭建,可自行编辑3D 训练比赛场地,所想即所得。
物流体积测量产品说明书

北京伟景智能科技有限公司物流体积测量产品说明书文件名称:物流体积测量产品说明书文件编号:VIZUM/ZD-MRT(201910)-V1.0生效日期:发布日期起文件页数:29页发文类型:用户手册版本号/修订日期:001/20200620发送部门:市场部发布日期:2019年10月25日目录一、产品概述 (1)1.1产品简介 (1)1.2产品用途及适用范围 (1)1.3产品特点 (3)二、产品配件清单及其说明 (3)2.1产品配件清单 (3)2.1.1线激光立体相机模块清单 (4)2.2产品硬件模块说明 (4)2.3产品硬件系统工作通讯图 (5)三、产品核心部件结构图 (6)3.1立体视觉系统结构图 (6)3.2结构说明 (7)四、技术特性 (8)4.1主要性能描述 (8)4.2详细参数列表 (8)五、产品安装说明 (10)5.1产品安装流程图 (10)5.2产品硬件安装说明 (10)5.3通讯配置 (11)六、产品操作使用说明 (12)6.1产品工作流程图 (12)6.2软件操作步骤说明 (12)6.3故障排查操作说明 (23)6.3.1通讯故障 (23)6.3.2检测图像“不全/没有” (24)6.3.33D图像“拉长/缩小” (24)6.4产品logo、标题修改说明 (25)七、产品系统对接说明 (27)7.1产品触发工作方式说明 (27)7.1.1网络协议触发 (27)7.1.2SDK函数调用触发 (27)7.1.3界面软触发方式 (28)7.1.4外部触发信号 (28)7.2数据结果输出说明 (29)7.2.1数据结果种类 (29)7.2.2显示方式 (30)7.3系统对接SDK操作说明 (30)八、产品注意事项 (30)8.1特别提示 (30)8.2安全注意事项 (30)8.3产品的保养与维修 (31)一、产品概述1.1产品简介物流体积测量产品采用伟景智能自主研发的软硬件体系,利用线激光立体相机对运动传送带上的物体及包裹进行扫描并将物体的三维尺寸、姿态等信息进行算法分析,从而得到长、宽、高、面积、体积等多方面尺寸测量应用,并可适用于单个物体摆放、多个物体接触摆放、多个物体水平摆放等场景,产品具备终端智能、模块化、相机安装高度可调、激光器安装位置可调、多台相机联动、大景深、易用性、灵活性等特点。
Siemens 3D Motion Sensor 产品说明书

The radar transmits a millimetre wave signal in the 24G band, the measured target reflects the electromagnetic wave signal and demodulates the transmitted signal, which is then amplified, filtered and processed by ADC to obtain the echo demodulated signal data. The amplitude, frequency and phase of the echo signal are decoded in the MCU unit, which ultimately
Table of Contents
Overview................................................................................................................. 3 1. Principle of operation ....................................................................................... 3 2. Hardware Design Considerations .................................................................. 4
enables the measurement of target parameters (breathing, movement, micro-motion, etc.) and scene evaluation.
VM-i

产品介绍产品介绍VM-i 是VMSENS 提供的基于MEMS 技术的低成本的,高性能三维运动姿态测量系统。
VM-i 包含三轴陀螺仪、三轴加速度计(即IMU ),三轴电子罗盘等辅助运动传感器,通过内嵌的低功耗处理器输出校准过的角速度,加速度,磁数据等,通过基于四元数的Motion Sensor Fusion 算法进行数据融合,实时输出以四元数、欧拉角等表示的零漂移三维运动姿态数据。
VM-i 可广泛应用于航模无人机、机器人、摄像云台、天线云台、地面及水下设备、虚拟现实、人体运动分析等需要低成本、高动态三维姿态测量的产品设备中。
VM-i微型AHRS 姿态方位参考系统姿态方位参考系统特点特点高精度360 度全方位空间姿态输出。
无需水平静态下启动。
快速动态响应与长时间稳定性(无漂移,无积累误差)相结合。
全固态微型MEMS 惯性器件,三轴加速度、三轴角速度和三轴磁场强度计高度集成9DOF 。
快速更新率,多种可编程的数据输出模式(四元数,欧拉角,旋转矩阵等)。
提供灵活的软件开发的编程接口,针对嵌入式的底层的通信接口以及应用层的DLL 动态链接库,便开发到多种设备以及应用。
性能性能内置运动姿态传感器与辅助测量设备,通过高效的空间状态数据融合算法,实现实时高精度的姿态测量,通过VMSENS 对不同运动模式的分析,可以根据不同的运动状态设定使用环境,更加切合多种不同的应用场合需求。
三维陀螺仪 三维加速度 三维磁力计 温度计VMSENSSensorFusion & Calibriated典型应用无人机无人机,,航模航模,,飞艇飞艇,,潜艇潜艇,,水下机器人等水下机器人等• 控制稳定 AUV/ROV/UUV 。
•水下定位设备姿态校准。
VM-i 是目前集成度最高的的商业化AHRS 系统,非常适合安装在航拍无人机,飞艇潜艇等对重量敏感的设备上,通过使用VMSENS 的AHRS 产品可以实现这些设备的姿态校准和自动稳定,确保无人机,飞艇,潜艇等能保证正确的空间姿态,内置的地磁传感器可以保证在任何时候保持航向不变,即使在在发生碰撞等剧烈运动的时候仍然知道自己姿态,能做出迅速的调整,确保设备的正常运行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
VM-i 是VMSENS提供的基于MEMS技术的低成本、高性能三维运动姿态测量系统。
VMSENS VM-i三态测量系统包含三轴陀螺仪、三轴加速度计(即IMU),三轴电子罗盘等辅助运动传感器,通过内耗处理器输出校准过的角速度,加速度,磁数据等,通过基于四元数的传感器数据算法进行运动姿实时输出以四元数、欧拉角等表示的零漂移三维姿态数据。
VMSENS VM-i三维运动姿态测量系统可于航模无人机、机器人、摄像云台、天线云台、地面及水下设备、虚拟现实、人体运动分析等需要高动态三维姿态测量的产品设备中。
特点
∙高精度360 度全方位位置姿态输出
∙可输出绝对方向(地平/ 地磁方向)
∙无需静态水平条件下限制启动
∙快速动态响应与长时间稳定性(无漂移,无积累误差)相结合
∙三轴加速度、三轴角速度和三轴磁场强度计高度集成9DOF
∙全固态微型 MEMS 惯性器件
∙快速更新率,多种可编程的数据输出模式(四元数,欧拉角,旋转矩阵等)
∙针对低成本方案,提供运动姿态算法,满足系统应用需求
∙提供灵活的软件开发的编程接口,针对嵌入式的底层的通信接口以及应用层的DLL动态链接发到多种设备以及应用
∙提供完整的软件运行环境,更容易上手应用
输出模式:
∙三维全姿态数据(四元数 / 欧拉角 / 旋转矩阵)
∙三维加速度 / 三维角速度 / 三维地磁场强度
软件支持
VMSENS Explorer
VMSENS Explorer是一款针对VMSEN三维运动姿态测量系统姿态测量产品的图形化接口的软件,通Explorer可以很轻易的读取,存储和显示实时的姿态数据,并且通过多种可视化的图形界面呈现给系统开发人员。
通过VMSENS Explorer可以很容易的设置VMSENS的姿态测量传感器参数,以及进行磁传感器的软的校准。
VMSENS SDK
VMSENS COM-Object API和 DLL API (适用Windows平台)。
COM-Object 组件是VMSENS提供给客户完成复杂的系统开发任务而提供的高级程序开发接口,通过COM-Object组件用户可以重复利用VMSENS的大部分代码,快速的开发属于自己的专属应用程序,和系统设计者可以更加关注您系统的设计,减少代码编写给您带来的烦恼。
同时通过使用COM-Object API 可以和Matlab、LabVIEW、Excel等进行无缝集成,使得您的程序更广泛的扩展性。
DLL API应用程序开发接口是VMSENS提供的针对小型的程序开发任务提供的开发接口,开发者通过API可以简单迅速的开发您所需要的应用程序,实现功能需求,同时DLL API也是绝大多数程序设使用的开发方式。
VMSENS Low Level Communication Lib(适用嵌入式平台设备)(可选)
针对嵌入式设备对运动姿态测量产品的需求,VMSENS公司提供针对底层程序开发的C Lib库,以嵌入式开发需要的用户同样可以使用VMSENS公司的产品进行设计。
VMSENS应用开发实例源代码
VMSENS SDK 提供基于VMSENS多种类型的应用程序接口演示实例源代码,通过阅读提供的实例源代关注释,非专业的程序开发人员也可以轻松在几分钟之内开始使用SDK 提供的API程序开发接口的应用程序。
iMT inertial Motion Tracking (可选)
iMT是VMSENS公司提供的针对工业领域中的诸多普遍具有共性的功能性应用中精简出来的功能集IMTP用户可以看到针对工业应用中可能出现的功能应用以及开发需求。
iMT不仅仅是软件功能展示集合,更重要的是一个开发软件模块集合,通过 IMPS的软件模块接口开发人员可以轻松调用组件模块,采用类似于搭积木的方式,通过组件模块的方式调用集成就可以看到的需要使用的运动姿态测量与分析功能。
iMT的的组件模块都通过了严格的现场测试,用于满足苛刻的用户需求,这些长期的使用测试经验的的程序更加安全可靠,减小自行开发出现的系统项目开发的不确定性,节省了用户的开发周期,品能够优于对手更快的占领市场。
应用领域
∙工业自动化控制
∙机器人姿态测量
∙无人机自动导航
∙云台姿态测量
∙汽车与摩托车驾驶测量
∙水下设备自动控制
∙钻井设备姿态测控
∙模拟仿真训练
∙动作捕捉与虚拟现实
∙人体运动生命科学研究
∙体育竞技训练
VMSENS VM-i三维运动姿态测量系统性能指标姿态和航向 Attitude and Heading
动态范围 orientation ranges - Pitch/ Roll/ Heading ±360°
最大角速度Full Scale of rate of
turn
±2000°/sec
静态精度俯仰/横滚 Static
accuracy roll/pitch
<0.3 deg
静态精度航向Static accuracy
heading1
<0.5 deg
动态精度Dynamic accuracy2 2 deg RMS
角度分辨率Angular resolution 0.05 deg
最大更新率Maximum update rate: 100Hz
接口 Interface
接口类型Digital interface RS232
工作电压Operating voltage 5 - 30V
功耗Power consumption 100 mW
工作环境Operational limits
环境温度Ambient temperature -20.... +60 oC 典型环境Specified performance 0.... +40 oC
物理特征 Hardware
Specifications
尺寸Dimensions (WxLxH)14x 21 x 2.25 mm 重量Weight < 1g(OEM)
说明:
1 无干扰磁场环境下测量(homogeneous magnetic environment)
2 在VMSENS数据融合算法下测定,取决于运动类型(under condition of a stabilized VMSENS sensor fusion algorithm, depend on movement type)。