新一代天气雷达介绍www
雷达气象学之第一章(天气雷达系统及探测理论)

天气雷达产品的显示方式2
• RHI (距离高度显示):固定方位角,天线 做俯仰扫描,探测某方位上回波垂直结构 。坐标:R-最低仰角的斜距; H-按测高 公式计算(标准大气折射)。
天气雷达产品的显示方式3
• CAPPI (等高平面位置显示):雷达以多 个仰角(仰角逐渐抬高)做0-360 °扫描 ,得到三维空间回波资料(体扫描),利 用内插技术获得某高度的平面分布
• 基本径向速度:表示整个360度方位扫描径 向速度数据,径向速度即物体运动速度平 行与雷达径向的分量。径向速度有许多直 接的应用,可以导出大气结构,风暴结构, 可以帮助产生、调整和更新高空分析图等。 平均径向速度产品有两点局限性:一是垂 直于雷达波束的风的径向速度被表示为0; 二是距离折叠和不正确的速度退模糊。
• 散射开来的电磁波称 为散射波
入射波
散射波
• 雷达波束通过云、降水粒子时将被散射, 其中有一部分散射波要返回雷达方向,被 雷达天线接收,在雷达显示器上就反映有 回波信号。
二、散射成因
• 微粒——粒子在入射电磁波极化下作强迫 的多极振荡,从而发出次波(散射波)。
• 粒子对电磁波的散射只改变电磁波的传播 方向,没有改变能量大小。
• d≈λ的大球形质点的散射,称为米散射。
§3.2 球形水滴和冰粒的散射
• 雷达天线接收到的只是粒子散射中返回雷 达方向(即θ= 180º方向)的那一部分能量, 这部分能量称为后向散射能量。
在a 2 r 1时 的瑞利散射条件下
在a 2 r 复数1时模的平方
后(向) 散16射 44函r6数mm:22 12(2 代入 4 ( )中
• 产品生成:根据操作员的输入指令,RPG在 体积扫描的基础上产生所需产品。
气象雷达

电波,它在传播过程中和大气发生各种相互作用。如 大气中水汽凝结物(云、雾和降水)对雷达发射波的 散射和吸收,以及散射体积内散射目标的运动对入射 波产生的多普勒效应等。
气象雷达回波不仅可以确定探测目标的空间位置、形
状、尺度、移动和发展变化等宏观特性,还可以根据 回波信号的振幅、相位、频率和偏振度等确定目标物 的各种物理特性,例如云中含水量、降水强度、风场、 铅直气流速度、大气湍流、降水粒子谱、云和降水粒 子相态以及闪电等。
1、应用较为广泛的天气预报
2、交通,能源,航空航天,国防,旅游,医疗,地质等领域的专业 气象服务
3、对严重影响民航安全的风切变,湍流和鸟类危险目标的有效探测 和预警
天气预报
制作天气预报的关键
是雷达回波分析,根 据回波特征判断影响 本区域的天气系统和 回波未来的发展趋势。 右图所示为一台风的 气象云图
高邮市天山镇龙卷的监测预警图
气象雷达发展动向与趋势
多普勒天气雷达是天气雷达发展的方向和趋势 快速扫描技术将应用于天气雷达 加强对多普勒风场反演技术的研究
返回 飞机在较大湍流作业下急 速下坠
鸟击探测
鸟击是指航空 器起降或飞行 过程中与鸟类, 蝙蝠等飞行物 相撞,ICAO (国际民航组 织)将鸟击灾 害定义为A类航 空灾害
我国气象雷达的发 展与建设
早期703、711型电子管体制的天气雷达
早期713、714、716A型半导体化天气雷达 第一代714CD型脉间相参多普勒天气雷达
常见雷达的主要技术参数
测云雷达 测雨雷达 测风雷达 圆极化雷达 调频连续波雷达 气象多普勒雷达 甚高频和超高频多普勒雷达
测云雷达
作用:探测云滴直径较
小,尚未形成降水的低 云和中云,测量其顶部 和底部高度及内部物理 特征
新一代天气雷达机房环境自动控制系统

3 视 频 监控
采用高 清晰视频 设备 ,能在远程 通过人 工控制
摄像 头旋转 任一个 角度 ,对 设备进行 监视 。视频监
要 是 因为雷 达机房 一般都是 在十几 层 的塔楼 或离办 公 区较远 的 山上 ,平时无人 值守 。若雷达在 机房环 境 温度高或 湿度大 时开机 ,又没有 启动空调 机和除
文 章 编 号 :1 7 — 4 1 ( 0 7 增刊 Ⅲ一 0 0 6 38 1 2 0 ) 01 -2 7
新 一 代 天 气 雷 达 机 房 环 境 自动 控 制 系 统
韦信 高
( 西气 象 技 术 装 备 中心 , 西 南 宁 5 02 ) 广 广 3 0 2
摘 要 : 绍 新 一 代 天气 雷 达 机 房 环境 温 、 度 自动 控 制 及视 频 监 控 的 实 现 ,确 保机 房 因 故 临 时停 电而 自动恢 复 启 介 湿 动 制冷 、除 湿 设备 的 目的 ,保持 机 房 温 湿 度 达 到要 求 ,同 时 达 到远 程 的 监 控 。
发 热 ,而且 雷达采用 了较多 的高速 芯片 ,对 环境要 求 比较严格 。尤其是 对温湿 度的要求 更高 ,为保证 雷达 能正常 运行 , 备 自身 已采用 了多级防 护措施 , 设
如在 各关键 部位设 置 了过压 、过流 、过热 、过湿 的 检 测手段 ,一旦 出现过载 ,雷达能 发 出警报 或 自动
湿 机 ,必然 会给雷 达运行带 来严重 影响 ,甚 至烧毁 设 备 。因此 ,给雷 达机 房增设温 湿度 自动控制 和视 频监控 系统显得尤 为重要 。
控 主 要 是监 控 机 房里 的各 种仪 表 和 设 备 的 工作 状 态 ,比如 电流表 、电压表 、功率表及 空调器 、去湿 机 等等 。在 远程监控 机上能 随时观察 到有 哪个仪表
新一代天气雷达产品数据格式
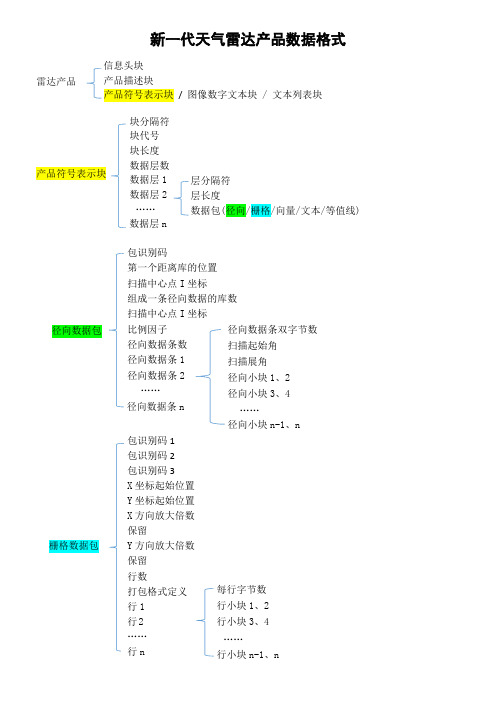
长度 2 2 4 4 2 2 2
名称 productCode productDate productTime fileLength radarCode receiveCode blockCount
含义 产品代号 产品生成日期,1970 年 1 月 1 日以来的天数 产品生成时间,00:00 以来的秒数 文件包含的字节数 雷达站代号 接收站代号 文件包含的数据块数目
扫描中心点 I 坐标
组成一条径向数据的库数
扫描中心点 I 坐标
比例因子
径向数据条双字节数
径向数据条数
扫描起始角
径向数据条 1 径向数据条 2
…… 径向数据条 n
扫描展角 径向小块 1、2 径向小块 3、4
…… 径向小块 n-1、n
包识别码 1 包识别码 2 包识别码 3 X 坐标起始位置
Y 坐标起始位置
3.1.1.3.1 首尾相连的数据包(Linked Vector Packet)
长度 2 2 2 2 2 2 2
名称 packetCode blockLength colorLevel
2 2
含义
包识别码, 6/9 数据块字节数
矢量颜色等级, 可选域,packetCode=9 时有此域 第 1 点 X 坐标 第 1 点 Y 坐标 第 2 点 X 坐标 第 2 点 Y 坐标 … 第 n 点 X 坐标 第 n 点 Y 坐标
径向小块 0、1,高字节为小块 0,低字节为小块 1
2 data[2]、data[3]
径向小块 2、3
…
…
2 data[n-2]、data[n-1] 径向小块 n-2、n-1
3.1.1.1.1.1 径向小块
长度
名称
新一代天气雷达(CINRAD/SA)PUP的地图汉化

新一代天气雷达(CINRAD/SA)PUP的地图汉化
张深寿
【期刊名称】《《福建气象》》
【年(卷),期】2002(000)005
【摘要】新一代天气雷达的PUP(产品处理系统)是敏视达公司新一代天气雷达
配套的产品接收处理显示软件,该软件显示的地名以拼音表示,极不直观,给识别回波地理位置带来很大的不便。
笔者经过反复摸索,发现了一种把地图汉化的方法,下面就向大家作一简单介绍:
【总页数】1页(P26-26)
【作者】张深寿
【作者单位】福建省龙岩市气象局龙岩364000
【正文语种】中文
【中图分类】P283.7
【相关文献】
1.CINRAD/SA、CINRAD/CA新一代天气雷达定标技术操作规范及注意事项 [J], 邵楠;步志超;秦建峰;姚喜乔
2.新一代天气雷达PUP地图细化设计与实现 [J], 张廷秀;付彦兵;苏添记
3.CINRAD/SA雷达PUP地图汉化编辑与准确定位 [J], 余建华陈秋萍赖荣钦
黄东兴傅伟辉
4.新一代天气雷达CINRAD/SA伺服系统故障分析与处理 [J], 毛承敏; 石伟; 黄梦妮; 王新发
5.新一代天气雷达CINRAD/SA伺服系统故障分析与处理 [J], 毛承敏; 石伟; 黄梦妮; 王新发
因版权原因,仅展示原文概要,查看原文内容请购买。
新一代多普勒天气雷达远程控制器

i
-
配电箱
2 2 0 V
i
;
功
电源 控 制
山 上 _ . J 璧 l l J
一
f 一
电 脑 L . — J L — _ J L — — — — J 一 圉 开 关 信 号 开 关 流 接
率交
.
关 , 按 键 信 号 手 动 — l _ _ l ; ! :
具有 全遥 控 功 能 的 雷 达 , 理 论 上 可 以实 现 无 人 值守 。但 强大 的功 能不 可避 免 的 使雷 达 软硬 件 都更 加 的复杂 化 , 从 而 导致 雷 达 的稳 定性 、 可 靠 性难 以达 到 无 人值 守 的要 求 。特 别 是 C I N R A D 至今 仍存 在 一 些 经 常 反 复 发 生 的小 故 障 , 更 是 给实 现无 人值 守带来 极 大的 障碍 。 经过统计 , 我 们 发 现绝 大 多 数 的 C I N R A D 停机 故 障都 是 一些 小 故 障 , 主要 发 生 在 R D A S C 计算 机通 讯和 伺服控 制 部分 , 最 常发 生 的是 “ 天
器 触器
R DA计算 L 伺服 汁算机
伺服总 电源
图 1 控 制 器原 理 框 图
1 . 2 控 制 器 方 案
可靠 , 不需 要 昂 贵 的 专用 设 备 就 可 以开 发 制 作 ,
控 制软件 也 相对 简单 。因此 选 择 计 算 机 的并 口 作 为控 制器 的 通讯 接 口。而且 空 出来 的两 个 串
4 2
浙 江 气 象
3 4卷 1期
新 一 代 多 普 勒 天 气 雷 达 远 程 控 制 器
林 忠南 张伟 红 徐 才 陈荣 华
《新一代天气雷达选址规定》

《新⼀代天⽓雷达选址规定》新⼀代天⽓雷达选址规定中国⽓象局⼆○○五年五⽉第⼀章总则第⼀条为指导我国新⼀代天⽓雷达选址⼯作,充分发挥新⼀代天⽓雷达这⼀⼤型设备的建设效益,特制定本规定。
第⼆条本规定所指的新⼀代天⽓雷达是⼀个能够定量测量回波强度、径向速度和谱宽等信息的S波段或C波段多普勒天⽓雷达系统。
第三条中国⽓象局监测⽹络司负责全国新⼀代天⽓雷达站址的规划与审批⼯作。
第四条本规定适⽤于我国统⼀布点的新⼀代天⽓雷达的选址⼯作。
第⼆章基本要求第五条新⼀代天⽓雷达站址应选定在《全国新⼀代天⽓雷达发展规划》所确定的地点(参见附表⼀)附近,所选站址与当地⽓象台(站)的直线距离⼀般不应⼤于50公⾥。
第六条新⼀代天⽓雷达站址近处四周⽆⾼⼤建筑物、⼭脉、⾼⼤树林等的遮挡。
在雷达主要探测⽅向上(降⽔过程的主要来向)的遮挡物对雷达天线的遮挡仰⾓不应⼤于0.5°,其它⽅向的挡⾓⼀般不应⼤于1°,对个别孤⽴障碍物可适当降低要求。
对每个候选站址应绘制四周挡⾓分布图以及距测站地平⾯1公⾥和海拔3公⾥、6公⾥⾼度的等射束⾼度图,作为站址论证的技术材料。
第七条新⼀代天⽓雷达应避免与其它⽆线电设施产⽣相互电磁⼲扰,重点候选站址须进⾏电磁环境测试。
第⼋条新⼀代天⽓雷达站址应便于建⽴与当地⽓象台的通信链路,以确保雷达探测信息和遥控信息的实时、可靠传输。
第九条选择站址时,应综合考虑供电、道路、⽤⽔、避雷、抗震等所需的建设投资额度。
在其它条件相近的情况下,优先考虑基础建设投资少、便于维持的站点,并尽可能考虑基础设施的综合利⽤。
第⼗条候选站址需考虑当地的城镇建设规划。
第三章前期准备第⼗⼀条省(区、市)⽓象局应组织由天⽓雷达专业技术⼈员和防雷、通信、基建等相关专业⼈员参加的新⼀代天⽓雷达选址⼯作班⼦。
选址组织管理应有专⼈负责,技术⼯作有专⼈把关。
第⼗⼆条根据本规定的基本要求,参考“新⼀代天⽓雷达候选站址条件⽐较表”(参见附表⼆),结合当地的实际情况,明确新⼀代天⽓雷达选址的技术要点,制定选址调研、勘察⽅案。
山东滨州新一代天气雷达气象产品简介

山东滨州新一代天气雷达气象产品简介
朱君鉴;吴书君
【期刊名称】《山东气象》
【年(卷),期】2000(020)004
【摘要】简要介绍了滨州使用的成都784厂生产的新一代多普勒天气雷达
714SDN提供的气象产品。
【总页数】3页(P43-45)
【作者】朱君鉴;吴书君
【作者单位】山东省气象中心,山东济南250031;滨州地区气象局,山东滨州256612
【正文语种】中文
【中图分类】TN959.4
【相关文献】
1.省大气探测技术中心在全国首次制定气象灾害预警信号新一代天气雷达组网技术提升我省气象应急能力 [J], 蒹葭
2.滨州新一代天气雷达车务楼综合布线设计 [J], 吴书君;刘云忠
3.山东滨州新一代天气雷达简介 [J], 吴书君;邵楠
4.山东省农科院与滨州市人民政府农业科技合作协议签字暨省农科院滨州分院、省农科院黄河三角洲高效生态经济研究中心揭牌仪式在山东绿都生物高科技园举行[J], 沈志强;于智慧
5.山东省气象局关于公布《山东省气象局实施新建扩建改建建设工程避免危害气象
探测环境行政许可细则》和《山东省气象局实施气象台站迁建行政许可细则》的通知鲁气办发[2016]154号 [J], ;
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
中国气象局颁发了新一代多普勒天气雷达 统一型号命名规定: CINRAD产品型号,分为两类八种型号 中美合资生产 国内独立研制 SC ( 714SDN ) CC ( 3830CD ) CD ( 714CDN ) CC J( 3830CD J)
SA — S波段增强型 SB — S波段标准型 CA — C波段增强型 CB — C波段标准型
多普勒天气雷达也是基于物理学中的多 普勒效应发展起来的,它可用来测量降水 区域内风场结构,大气垂直速度和某些强 对流天气的风场特征。它探测的是云、雨 、冰雹等弥散的群目标物。常规数字化天 气雷达利用的是降水回波的幅度信息,即 利用信号强度来探测雨区的分布、强度、 垂直结构等,多普勒除此之外,还可利用 降水回波频率与发射频率之间变化的信息 来测定降水粒子的径向速度,并通过此推 断风速分布,垂直气流速度,大气湍流, 降水离子谱分布,降水中特别是强对流降 水中风场结构特征。
主用户处理器 PUP
主用户处理器PUP的主要功能是获取、存储和显示 产品。预报员主要通过这一界面获取所需要的雷达产 品,并将它们以适当的形式显示在图形监视器上。因 此,预报员应当熟练掌握PUP的基本操作。 PUP(CINRAD WSR-98D)的操作界面主要分为 4个区域:视窗、菜单、工具栏和状态栏。视窗进一步 分为3个子区域:图象区、标注区和属性表区。在产品 有显示状态下菜单的种类有12个。工具栏有4种:常规 工具栏、动画工具栏、警报信息栏和编辑工具栏。状 态显示栏的状态信息有三种。
2、CINRAD/CB组成:
新一代天气雷达系统由五个主要部分构成:雷达数据采 集子系统(RDA)、宽/窄带通讯子系统(WNC)、雷达产 品生成子系统(RPG)、主用户处理器(PUP)和附属安装 设备。
天气雷达的组成
天气雷达由发射系统、天线系统、接收系统和显 示系统等部分组成。 发射系统功能:产生某一功率电平的所需射频波 形。组成:射频功率源、调制器、电源。产生射频 功率的两种方法,功率振荡器发射机和主振功率放 大器发射机。发射机产生的射频信号可以是连续波 或脉冲波。
新一代多普勒天气雷达 在天气预报中的应用
咸阳市气象局
吴宇华
主要内容
新一代雷达简介 多普勒雷达的原理及基本识别
数据模糊的处理
多普勒雷达的基本产品 西安多普勒雷达产品的识别等
一、雷达的发展过程
雷达这个名词是美国海军在第二次世界大战的1940年 使用的一个保密代号。它是“无线电探测和测距”(Radio Detection and Ranging)缩写radar译音。雷达的基本任务是 探测感兴趣的目标,并从中提取诸如目标距离、角坐标、 速度和反射特征方面的信息。雷达有着广泛的用途,如航 空、航海、气象、测地学、天文、卫星通信、宇宙航行等。 尽管雷达是在第二次世界大战期间获得了广泛的应用和 发展,但在此之前,它却未得到应有的声誉,而雷达的工 作原理则是早在1900年便为科学家所知晓和提出来了。 从雷达出现的历史来看,雷达就是在第二次世界大战 前夕,为了防空的需要而研制发展起来。
CINRAD雷达与常规 天气雷达相比的优势
1.灵敏度提高 2.分辨率提高
3.具有风场探测
4.具有三维数据的自动采集能力 5.具有一套科学的数据处理的能力
频率控制精 度10-9 !
•较合理的硬件工作模式和观测模式
为了能够获得最大不折叠距离探测范围同时获得最大 的不模糊径向速度,在雷达硬件工作模式方面,采用了连 续监测模式CS、连续Doppler模式CD和批模式B,对雷达脉 冲对数、脉冲宽度、脉冲重复频率等雷达参数进行了组合 ,以适应上述要求。在观测模式方面,设有四种观测模式 ,其中:降水模式有VCP11模式和VCP21模式两种,以适应 不同降水类型的需要。CINRAD-SA雷达由于发射机功率强大 ,接受机灵敏度高,还设有晴空模式:VCP31模式和VCP32 模式,用以探测晴空湍流、风切变等。在上述降水观测模 式中,为了达到获得最大探测不折叠距离和最大不模糊径 向速度,雷达采用了扫描方式与雷达参数相结合的办法实 现上述目标。
2
Z=∫N(D)D dD
Z dBZ 10 lg Z0
6
Z
0
1m m6 / m 3
3.1.2 径向速度和谱宽
多普勒效应 频率变化难以直接测量 脉冲对相移 全相干雷达:每个发射脉冲的位相相对于一个 内部参考信号而言是相同的。当脉冲返回时, 与参考信号做比较以确定信号位相。任何脉冲 到脉冲的位相变化可以被计算。
工作模式(Operational Mode)
CINRAD/CB雷达使用两种工作模式,即 降水模式和晴空模式。雷达的工作模式决定了 使用哪种VCP,而VCP又确定了具体的扫描方式。 工作模式A:降水模式使用VCP11或VCP21, 相应的扫描方式分别为14/6 和9/6。
工作模式B:晴空模式使用VCP31或VCP32, 两者都使用扫描方式5/10。
C波段移动型
合肥雷达楼
我国1999年安 装的第一部多 普勒雷达
西 安 雷 达
2 0 0 4 年 8 月 正 式 使 用
二、多普勒天气雷达的原理
一般归定离开雷达方向的速度为正, 向着雷达的速度为负,一般在图上用暖色 表示正径向速度,冷色表示负径向速度。 因此在分析速度图时,应首先查看色标, 某些雷达的约定是相反的。 径向速度中的速度的分析有一定的限 制,两点的信息不在同心圆上,就代表所 处的高度不同,看图示不能仅从平面的角 度去理解,应由空间立体的概念。 雷达图上,一般用紫色时表示不能识别的 值,观测时通过调整要尽量使紫色最小。
雷达数据采集子系统
RDA 是用户所使用的雷达数据的采集单元。 RDA由四个部分构成:发射机,天线,接收机 和信号处理器。它的主要功能是产生和发射射 频脉冲,接收目标物对这些脉冲的反射能量, 并通过数字化形成基数据(base data)。RDA 的上述功能是由RDA计算机监视和控制的。
发射机 天线 接收机 信号处理器 RDA内的数 据记录 宽带通讯 雷达监控系统
中国气象局计划在全国范围内建设126部CINRAD多普勒天气雷达, 其中有66部S波段多普勒天气雷达,60部C波段多普勒天气雷达。图中 红色圆点表示S波段。兰色方块表示C波段雷达。
一般,在沿海地区安装S波 段雷达,内陆地区安装C波段 雷达,这样可以减少衰减, 成本也较小。 S波段雷达与C 波段雷达价格相差10倍。
用于降雨模式, VCP21
扫描方式#3:10分钟完成5个不同仰角上的扫描(5/10) 用于晴空模式, VCP31和VCP32
体扫模式 (VCP:Volume Cover Pattern)
扫描方式确定一次体积扫中使用多少个仰角,而具体是哪 些仰角则由体扫模式来规定。WSR-88D 可有20个不同的VCP,目 前只定义了其中的4个: VCP11 --- VCP11(scan strategy #1,version 1)规定5 分钟内对14个具体仰角的扫描方式。一般用于测云和降雪。 VCP21 --- VCP21 (scan strategy #2,version 1)规定 6分钟内对9个具体仰角的扫描方式。一般用于较强的大气对流。 VCP31 --- VCP31 (scan strategy #3,version 1)规定 10分钟内对5个具体仰角的扫描方式。主要用于低层晴空大气观 测。 VCP32 --- VCP32(scan strategy #3,version 2)确定 的10分钟完成的5个具体仰角与VCP31相同。不同之处在于VCP31 使用长雷达脉冲而VCP32使用短脉冲。
3.1.3 最大不模糊距离与距离折叠
最大不模糊距离:最大不模糊距离是指一个发射脉冲 在下一个发射脉冲发出前能向前走并返回雷达的最长 距离 c Rmax 2 PRF
其中,Rmax为最大不模糊距离,c为光速,PRF为脉冲重复频率
• 距离折叠(模糊)
距离折叠
雷达测距公式 R=0.5ct,t为脉冲发出到返回的 时间。 雷达测距按照最新发出的脉冲从发出到返回的 时间来计算。 距离折叠是指雷达确定的目标物方位是正确的 但距离是错误的。当目标物位于雷达最大不模 糊距离之外时会发生这一现象,也就是说,目 标物的定位是模糊的。
目前我国共有130多部多普勒雷达,分为
10cm的s波段和5cm的c波段两种,南方为 s波段、北方为c波段。西安的雷达型号 为CINRA—CB型。我省内共有5部多普 勒雷达:延安、榆林、汉中、安康、宝 鸡。 应用领域:主要在强对流天气的监测和 预警,天气尺度和次天气尺度降水的监 测,降水的测量、风的测量以及数据的 同化应用等
雷达产品生成子系统(RPG)
RPG是一个多功能的单元。它由宽带通讯线 路从RDA接受数字化的基数据,对其进行处理生 成各种产品,并将产品通过窄带通讯线路传给用 户。RPG还可以通过雷达控制台(UCP)对RDA 进行监控(遥控方式)。RPG是整个雷达系统的 指令中心。 雷达控制台UCP是RPG的操作界面,可以实 时地对RPG和RDA进行控制。UCP采用流行的窗 口界面。主要的命令集成在菜单和工具栏中,使 用这些命令可实现对RPG和RDA的有效控制。 UCP为雷达操作员提供了一个可以与RPG和RDA 系统人机交互的界面。
图1 多普勒雷达体扫描观测方式
常规雷达观测无法得到三维数据结构、 常用不同仰角的体扫,从0.5度低仰角到 19.5度高仰角14个角度进行。
3、雷达观测
扫描方式(scan strategy)
扫描方式告诉雷达在一次体积扫描(volume scan) 中使用多少仰角和时间。CINRAD/CB 使用三种扫描方式: 扫描方式#1:6分钟完成14个不同仰角上的扫描(14/6) 用于降雨模式,VCP11 扫描方式#2:6分钟完成9个不同仰角上的扫描(9/6)
ห้องสมุดไป่ตู้
什么是Doppler速度 ? 风矢量的径向分量