风力发电机组控制系统设计 —最大功率点跟踪控制
风力发电机组控制系统

昝润鹏双馈机运行原理图•控制系统利用DSP或单片机,在正常运行状态下,主要通过对运行过程中对输入信号的采集、传输、分析,来控制风电机组的转速和功率;如发生故障或其它异常情况能自动地检测并分析确定原因,自动调整排除故障或进入保护状态•DSP(digital signal processor)是一种独特的微处理器,是以数字信号来处理大量信息的器件。
其工作原理是接收模拟信号,转换为0或1的数字信号。
再对数字信号进行修改、删除、强化,并在其他系统芯片中把数字数据解译回模拟数据或实际环境格式。
它不仅具有可编程性,而且其实时运行速度可达每秒数以千万条复杂指令程序,远远超过通用微处理器,是数字化电子世界中日益重要的电脑芯片。
它的强大数据处理能力和高运行速度,是最值得称道的两大特色。
•控制系统主要任务就是能自动控制风电机组依照其特性运行、故障的自动检测并根据情况采取相应的措施。
•控制系统包括控制和检测两部分,控制部分又分为手动和自动。
运行维护人员可在现场根据需要进行手动控制,自动控制应该在无人值守的条件下实施运行人员设置的控制策略,保证机组正常安全运行。
•检测部分将各种传感器采集到的数据送到控制器,经过处理作为控制参数或作为原始记录储存起来,在机组控制器的显示屏上可以查询,也要送到风电场中央控制室的电脑系统,通过网络或电信系统现场数据还能传输到业主所在城市的办公室。
•第一:低于切入风速区域。
一旦满足切入条件,控制启动风机。
•第二:切入风速到额定风速区域。
控制目标是最大风能捕获,通常将桨距角保持在某个优化值不变,通过发电机转矩控制叶轮转速,实现最佳叶尖速比。
•第三:超过额定风速区域。
通过变桨控制保持输出功率和叶轮转速恒定。
叶尖速比:叶轮的叶尖线速度与风速之比。
叶尖速比在5-15时,具有较高的风能利用系数Cp(最大值是0.593)。
通常可取6-8。
•风传感器:风速、风向;•温度传感器:空气、润滑油、发电机线圈等;•位置传感器:润滑油、刹车片厚度、偏航等;•转速传感器:叶轮、发电机等;•压力传感器:液压油压力,润滑油压力等;•特殊传感器:叶片角度、电量变送器等;•⑴控制系统保持风力发电机组安全可靠运行,同时高质量地将不断变化的风能转化为频率、电压恒定的交流电送入电网。
风力发电系统运行及控制方法
风力发电系统运行及控制方法摘要:加强使用各类新能源的发展,风力发电系统作为一种新能源逐渐被应用到人们的生活和工作,利用风力发电系统不仅可以减少煤炭资源的消耗,保护环境,减少环境污染,电力供应质量可以继续为我国提供安全高效的保障。
本文主要研究风力发电系统的运行与控制。
关键词:风力发电系统;运行控制;方法前言:今天,随着技术无污染、高效发展的发展,各国都在积极探索和研究风能和其他新能源的开发,特别是在当前能源短缺的形势下。
风力发电系统的研究越来越重要。
根据各种运行方式和控制技术,风力发电系统可分为定速恒频系统和变速恒频系统,以充分利用风能。
1风力发电系统结构风力发电系统的系统结构,主要由风轮、齿轮箱、发电机和转换器设备和其他设备,风轮主要是用来捕获风能,然后进一步将捕获的风能转化为机械能,机械能可以用到人们生活中的发电中,可以利用风的能量由发电机最终完成发电,然后转移到电网实现发电的目的。
以小型风力发电系统中风力发电机为例简单介绍,小型风力发电系统主要由小型风力发电机、发电机、三相无控整流器、升压变换器、逆变器、滤波器、直流电压负载和负载局部用户部分组成。
和谐运行,促进风电系统正确运行与控制。
在风力发电系统的运行控制过程中,为了实现风力发电机组的最大功率跟踪,对变换器进行了一系列相关的控制研究。
2风力发电系统液压系统综述压力冲击应保持在最小值,压力冲击大能造成危险。
即使在电源故障恢复的情况下,也必须保证安全的工作条件。
下列外部因素不影响液压系统的运行:(1)污染介质;(2)沙尘;(3)杂质;(4)外加磁场、电磁场和电场;(5)阳光;(6)振动。
如果液压系统是保护系统的一部分,电网故障和外部极限温度不应危及系统的正常运行。
同步发电机以恒定的速度运行,它不受连接电网频率作用,也不受转矩的影响。
电网频率所规定的速度也是通常的同步速度。
异步发电机也是一种发电机,它允许一定的偏离,即偏离电网频率所规定的速度。
直驱式永磁同步风力发电机组建模及其控制策略
直驱式永磁同步风力发电机组建模及其控制策略一、本文概述随着全球能源需求的持续增长和环境保护的日益紧迫,风力发电作为一种清洁、可再生的能源形式,正受到越来越多的关注。
直驱式永磁同步风力发电机(Direct-Drive Permanent Magnet Synchronous Wind Turbine Generator, DDPMSG)作为一种新型风力发电技术,以其高效率、高可靠性以及低维护成本等优点,逐渐成为风力发电领域的研究热点。
本文旨在对直驱式永磁同步风力发电机组的建模及其控制策略进行深入研究。
文章将介绍直驱式永磁同步风力发电机的基本结构和工作原理,为后续建模和控制策略的研究奠定基础。
接着,文章将详细阐述直驱式永磁同步风力发电机组的数学建模过程,包括机械部分、电气部分以及控制系统的数学模型,为后续控制策略的设计提供理论支持。
在控制策略方面,本文将重点研究直驱式永磁同步风力发电机组的最大功率点跟踪(Maximum Power Point Tracking, MPPT)控制和电网接入控制。
最大功率点跟踪控制旨在通过调整发电机组的运行参数,使风力发电机组在不同风速下都能保持最佳运行状态,从而最大化风能利用率。
电网接入控制则关注于如何确保发电机组在并网和孤岛运行模式下的稳定运行,以及如何在电网故障时实现安全可靠的解列。
本文还将探讨直驱式永磁同步风力发电机组的控制策略优化问题,以提高发电机组的运行效率和稳定性。
通过对控制策略进行优化设计,可以进一步减少风力发电机组的能量损失,提高风电场的整体经济效益。
本文将对直驱式永磁同步风力发电机组的建模及其控制策略进行总结,并展望未来的研究方向和应用前景。
通过本文的研究,可以为直驱式永磁同步风力发电机组的实际应用提供理论指导和技术支持,推动风力发电技术的持续发展和优化。
二、直驱式永磁同步风力发电机组的基本原理直驱式永磁同步风力发电机组(Direct-Drive Permanent Magnet Synchronous Wind Turbine Generator,简称DD-PMSG)是一种将风能直接转换为电能的装置,其基本原理基于风力驱动、机械传动、电磁感应和电力电子控制等多个方面。
风力发电机组的控制系统
风力发电机组的控制系统风力发电作为一种清洁、可再生的能源,越来越得到人们的重视和使用。
而风力发电最核心的部分就是风力发电机组控制系统。
本文将深入探讨风力发电机组控制系统的相关知识。
一、风力发电机组的基本组成部分风力发电机组通常由3个主要部分组成:风力涡轮、变速器和发电机。
其中变速器是为了将风力涡轮的旋转速度转变成适合发电机的速度,同时保证风力涡轮在各种风速下都能正常转动。
而发电机则是将机械能转变为电能。
二、风力发电机组的控制系统的分类根据控制对象的不同,风力发电机组控制系统可以分为风力涡轮控制系统和整机控制系统。
1. 风力涡轮控制系统风力涡轮控制系统主要由风速测量仪、方向传感器、转矩信号传感器、角度传感器、变桨控制器等部分组成。
其主要作用是对风速和转矩进行检测和获取,然后根据这些数据控制机组桨叶的角度,调节风力涡轮的输出功率,以适应不同的风速和负载要求。
当遭遇大风或预期外部异常情况时,风力涡轮控制系统还可以自动停机。
2. 整机控制系统整机控制系统主要由仪表、控制器、通信模块、电动机传动机构、机械部分等部分组成。
整机控制系统起到了协调、控制各部分工作的作用,可以实现以最佳的效率输出电能。
其主要作用是监控发电机组的运转状态,通过检测各项参数实时调整变速器的转速,并及时进行告警和自动停机。
三、风力发电机组控制系统的关键技术1. 风力涡轮桨叶轴系统的控制风力涡轮桨叶轴系统的控制是风力发电机组控制系统的核心部分之一,也是解决风机输出功率波动和抖动问题的重要技术。
目前常见的调节方式包括机械调节和电动调节两种。
机械调节方式主要采用伺服驱动的伸缩臂与桨叶之间的连杆机构实现,而电动调节则利用变速器的电动油门、电子液压伺服系统或液压拉杆控制桨毂角度。
其中,电动调节方式更加智能化、精准化。
2. 整机控制系统的优化算法整机控制系统的优化算法是风力发电机组控制系统技术的另一个重要方向。
通过对风能、转速、功率、角度等数据进行分析,整机控制系统可通过智能算法,实现最大效率的输出电能。
风力发电机组控制技术
恒速定桨距风力发电机组存在低风速运行时风能转换效 率低的问题。在整个运行风速范围内由于气流的速度是不断 变化的,如果风力机的转速不能随风速而调整,必然要使风 轮在低风速时的效率最低。发电机本身也存在低负荷时的效 率低的问题。 变桨距的风力发电机组,起动时可对转速进行控制,并 网后可对功率进行控制,使风力机的起动性能和功率输出特 性都有显著的改善。风力发电机组的变桨距系统组成的闭环 控制系统,使控制系统的水平提高到一个新的阶段。
1.2.2 风力发电机组安全运行的基本条件 对安全运行起决定因素是风速变化引起的转速的变化,所以 转速的控制是机组安全运行的关键。风速的变化、转速的变化、 温度的变化、振动等都会直接威胁风力发电机组的安全的运行。 1.2.2.1 风力发电机组工作参数的安全运行范围 1风速 风速的规定工作范围3~25m/s,风速超过25m/s以上时,会 对机组的安全性产生威胁。 2转速 风力发电机组超速时,对机组的安全性将产生严重威胁。
风力发电机组的控制系统
风力发电机组的控制系统
1 概述 2 定桨距风力发电机的控制 3 变桨距风力发电机的控制 4 变速风力发电机的控制 5 控制系统的执行机构 6 偏航系统
1 概述 风力发电机组控制系统是机组正常运行的核心,其控制技 术是风力发电机组的关键技术之一,其精确的控制、完善的功 能将直接影响机组的安全与效率。 1.1 风力发电机组控制系统的基本组成 控制系统关系到风力机的工作状态、发电量的多少以及设备 的安全。 发电机的结构和类型不同形成了多种结构和控制方案。风力 发电机组控制系统由传感器、执行机构和软/硬件处理器系统组 成。
(4)热继电器保护运行,设过热、过载保护控制装置。 (5)接地保护,设备所有零部件因绝缘破坏或其他原因可能引 起出现危险电压的金属部分,均应实现保护接地。
小型风力发电控制系统的设计与实现
文章 编 号 : O 7 9 1 ( 0 0 1 -0 1 — 2 l O — 4 2 1 ) l 0 0 6 2
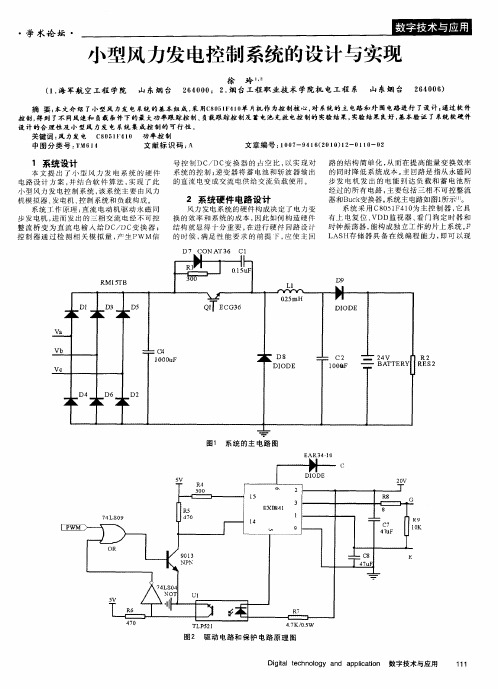
路 的 结构 简 单 化 , 而在 提 高 能量 变换 效率 从 的同 时降 低 系统 成 本 。 回路 是 指 从永 磁 同 主 步 发 电机 发 出 的 电能 到 达 负 载 和 蓄 电池所 经 过 的昕 有 电路 , 主要 包 括三 相 不 可控 整流 器和 B c 变换器 。 uk 系统 主 电路如 图l 所示 …。 系统 采 用 C8 5l l 为 主控 制 器 , 具 0 F4 O 它 有上 电复 位 、 VDD监 视 器 、 门狗 定 时器 和 看 时钟 振 荡器 , 能构成 独立 工 作 的片上 系统 。 F L S A H存储 器 具 备 在 线 编程 能力 , 即可 以现
1 系统设计
本 文 提 出 了小 型 风力 发 电 系 统 的硬 件 电路 设 计 方 案 , 结 合软 件 算法 , 现 了 此 并 实 小 型 风力 发 电控 制 系统 , 系统 主 要 由风 力 该 机模 拟器 、 电机 、 制系统 和 负 载丰 成 。 发 控 句 系统 ] 作 原理 : 流 电动 机驱 动 永 磁 同 - 直 步 发 电机 , 进而 发 出 的三相 交流 电经 不可 控 整 流桥 变为 直流 电输 入 给 Dc/ DC变 换 器 ; 控 制器 通 过检 测相 关模 拟 量 , 生PW M信 产
・
学 术论 坛 ・
小型风 力发 电控制 系统的设计 与实现
徐 玲l ' ( . 军航 空工程 学 院 山 东烟 台 2 4 0 1海 6 0 0;2. 台工 程职 业 技 术 学 院机 电工 程 系 山 东 烟 台 烟 240) 6 0 6
风力发电系统的MPPT方法研究
风力发电系统的MPPT方法研究摘要:文章介绍了几种MPPT方法,说明其方法的优点和缺点。
通过优化MPPT控制的算法,可以提高风力发电的效率。
关键词:风力发电;最大功率点跟踪;爬山法;反馈控制对最大功率点跟踪控制的研究是风电系统研究的热点之一。
文章介绍了常用的MPPT算法,对于研究新型的MPPT算法有参考价值。
1 风力机特性研究风力机把风能转化为机械能的模型非常困难,因而用一种简单的模型进行描述。
由贝兹定理可知,风机吸收的功率为:Pm=1/2ρA V3Cp(λ,θ)。
其中,ρ为空气密度,A为风轮叶片面积,V为风速,CP(λ,θ)为风轮利用系数,与叶尖速比λ和浆距角ρ有关,λ=ωR/V。
其中,ω为风轮机械角速度,R为风轮半径。
在正常运行时,浆距角θ不变,功率输出与叶尖速比λ有关。
叶尖速比λ保持在最佳叶尖速比处,就能使输出功率Pm保持在最大功率点。
2最大功率点跟踪方法常用的MPPT算法大致归为两类:反馈控制和扰动控制。
反馈控制中有最佳叶尖速比、功率反馈法等,扰动控制法又称爬山法。
2.1最佳叶尖速比法最佳叶尖速比法是在风速变化时,保持叶尖速比λ在最佳λopt处。
这样在变风速时,都能保持风能最佳利用率。
这种方法直接、明确,但是需要测量风速和风机转速。
由于风速的不确定性,风速测量不精确,这种算法会导致系统可靠性低,且需要风力机的特性,导致成本增加,很少在实际中应用。
2.2功率反馈法功率反馈法测量出风机转速,然后根据最大功率曲线得出对应的功率值,作为机侧双闭环控制的给定值,与实际功率值进行比较。
通过双闭环控制,使发电机输出功率跟随最大功率的给定值。
这种方法不需要测量风速,因为不存在测量风速所带来的问题。
最大功率曲线需要通过模拟仿真得到,实现起来相对麻烦。
不过,可由先进的设备测量得到。
在一些大型风电场中也有应用。
2.3爬山法由转速功率曲线可知,控制转速扰动,可调节输出功率接近最大功率。
当前风机功率与前周期风机功率进行比较,如果功率下降,转速扰动反向,否则保持符号不变。
风力发电机组的电力调节与功率控制模型
风力发电机组的电力调节与功率控制模型1. 引言风力发电是一种可再生的清洁能源,在全球范围内得到了广泛的应用和发展。
然而,由于风力发电的依赖性和不稳定性,需要对风力发电机组进行电力调节和功率控制,以确保电网的稳定性和安全性。
本文旨在讨论风力发电机组的电力调节与功率控制模型,并提出一种有效的解决方案。
2. 风力发电机组的电力调节风力发电机组的电力调节是指根据电网负荷需求和风速变化,调整风力发电机组的输出功率。
在电网负荷低于风力发电机组的输出功率时,需要将多余的电力存储起来或者将其余放入电网;当电网负荷高于风力发电机组的输出功率时,需要从电网中补充额外的电力。
因此,电力调节对于维持电网的平衡和稳定非常重要。
3. 风力发电机组的功率控制风力发电机组的功率控制是指根据电网负荷需求和风速变化,控制风力发电机组的输出功率稳定在一个预设的目标范围内。
一方面,功率控制需要使风力发电机组的输出功率与电网需求保持一致,以满足电网的需求;另一方面,功率控制还需考虑风速变化对风力发电机组的影响,以确保风力发电机组的安全运行和寿命。
4. 电力调节与功率控制模型为了实现风力发电机组的电力调节与功率控制,需要建立相应的数学模型。
常用的模型有以下几种:4.1 传统PID控制模型PID控制模型是最常用和经典的控制模型之一。
它通过测量误差(电网需求功率与风力发电机组输出功率的差值)和控制器得到控制信号,从而实现对风力发电机组输出功率的调节和控制。
PID控制模型简单且易于实现,但在面对复杂动态环境和大幅风速变化时,可能无法满足精确控制的要求。
4.2 模糊控制模型模糊控制模型利用模糊逻辑和模糊规则对风力发电机组进行调节和控制。
由于模糊控制模型可以处理模糊性和不确定性,因此在对风力发电机组进行控制时更具适应性和鲁棒性。
但是,模糊控制模型需要事先确定模糊规则和隶属函数,对于复杂系统和精确控制要求较高的环境可能存在一定的局限性。
4.3 预测控制模型预测控制模型通过预测风速变化和电网负荷需求,得到风力发电机组的最优输出功率。
风光互补发电系统最大功率跟踪综述
风光互补发电系统最大功率跟踪综述张丽霞1,张秀霞1,2,刘婷1,王二垒1,杨小聪1,魏舒怡3(1.北方民族大学电气信息与工程学院,宁夏银川750021;2.西安交通大学电子信息工程学院,陕西西安710049;3.中国科学院研究生院北京100049)摘要:风光互补发电系统的运行需要快速准确地进行最大功率点跟踪,为此综述了风光互补发电系统最大功率点跟踪的几种方法,包括在太阳能电池阵列部分日益成熟、改进和优化策略较多的扰动观察法、电导增量法和恒压控制法;风力发电机部分的叶尖速比控制法、功率信号反馈法、扰动观察法,分别说明了各种跟踪控制方法的优点和不足之处。
最后探讨了最大功率点跟踪控制方法的发展思路,对该领域今后的研究方向做了展望。
关键词:风光互补;最大功率点跟踪;控制策略;太阳能电池阵列;风力发电机中图分类号:TM614;TM615文献标识码:A文章编号:1674-6236(2012)23-0029-03Reveiw of maximum power point tracking for wind -solar hybrid generation systemZHANG Li -xia 1,ZHANG Xiu -xia 1,2,LIU Ting 1,WANG Er -lei 1,YANG Xiao -cong 1,WEI Shu -yi 3(1.School of Electronics and Information Engineering ,North National University ,Yinchuan 750021,China ;2.School of Electronics and Information Engineering ,Journal of Xi ’an Jiaotong University ,Xi ’an 710049,China ;3.Graduate School of the Chinese Academy of Sciences ,Beijing 100049,China )Abstract:The Maximum Power Point Track(MPPT )of the wind -solar hybrid generation rapidly and accurately wasnecessary and it can increase the output power.This paper summarizes the methods of MPPT ,the solar panels MPPT control technology including the Perturbation and observation control ,incremental conductance control and constant pressure control.the wind turbine including tip speed ratio control ,power signal feedback control and perturbation and observation control.Points out the limitations and notes of those methods.Finally ,some feasible thoughts with new technologies for wind -solar hybrid generation are discussed and its study direction in the future is also looked ahead.Key words:wind -solar hybrid ;maximum power point tracking ;control technologies ;solar array ;wind driven generator收稿日期:2012-08-17稿件编号:201208077基金项目:国家自然科学项目基金(60844006);北方民族大学研究生创新项目基金(2012XYC040、2012XYC041);国家级大学生创新项目(CJJ-CX-DX-39);宁夏高等学校科学研究项目基金(2011JY002);北方民族大学科学研究专项任务项目基金资助(2011XJZKJ02)。
风力发电多智能体协同控制系统设计与性能分析
风力发电多智能体协同控制系统设计与性能分析随着全球对可再生能源的关注度不断增加,风力发电作为一种绿色、清洁的能源形式逐渐受到了广泛的关注与应用。
为了提高风力发电的效率和可靠性,现代风力发电站往往采用多个风力涡轮发电机进行协同工作。
风力发电多智能体协同控制系统成为了提高风力发电站整体性能的关键技术。
一、风力发电多智能体协同控制系统的设计原理与目标风力发电多智能体协同控制系统是基于多个智能体之间协同合作的控制系统。
每个智能体代表着一个风力涡轮发电机,通过相互通信、数据共享和决策交互来实现整个发电站的协同控制。
系统设计的目标是通过有效的资源分配和动态调整,最大化发电系统的总体效能、稳定性和可靠性。
二、风力发电多智能体协同控制系统的关键技术与主要功能1. 智能体通信与数据共享技术:风力发电站中的每个风力涡轮发电机是一个智能体,通过网络通信技术实现各个智能体之间的通信和数据共享。
智能体可以共享自身的状态信息、风速和发电数据等,以便进行全局优化和决策。
2. 智能体决策与优化技术:智能体通过分析接收到的数据,并结合预测模型与优化算法,采取合适的控制策略,实现发电系统的最优功率追踪。
同时,智能体之间还需要进行协商与协调,以实现整个系统的协同工作。
3. 系统状态监测与故障检测技术:风力发电系统需要实时监测和检测风力涡轮发电机的运行状态和故障情况。
通过建立合适的监测装置和故障检测算法,可以实现对发电机的健康状况进行实时监控,并及时进行故障诊断和维护。
4. 动态资源分配和负载均衡技术:风力发电站中的每个发电机都需要动态分配风资源,并进行负载均衡控制,以保证整个系统的运行效率和平稳性。
通过建立动态资源分配模型和负载均衡算法,可以实现系统的优化控制。
三、风力发电多智能体协同控制系统的性能分析与评估风力发电多智能体协同控制系统的性能分析和评估主要包括以下几个方面:1. 效率与可靠性分析:通过对风力发电机的发电效率、能量损失和故障率等指标进行分析,评估协同控制系统对整个系统效率和可靠性的影响。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
课程设计说明书 风力发电机组控制系统设计 —最大功率点跟踪控制
专业 新能源科学与工程 学生姓名 喻绸绢 班级 能源121 学号 1210604122 指导教师 薛迎成 完成日期 2015年12月14日 目录 1.控制功能设计要求 .............................................................................. 1 1.1任务 ............................................................................................. 1 2.设计 ...................................................................................................... 3 2.1 介绍对象(风力发电系统的最大功率点跟踪控制技术研究)3 2.2控制系统方案 ............................................................................. 3 2.2.1风力机最大功率点跟踪原理 ............................................. 3 2.2.2风力机发电系统 ................................................................. 6 2.2.3风速变化时的系统跟踪过程 ........................................... 11 3.硬件设计 ............................................................................................ 13 4.软件设计 ............................................................................................ 16 5.仿真或调试 ...................................................................................... 17 参考文献 ............................................................................................... 19 3 1
1.控制功能设计要求 1.1任务 能源与环境是当今人类生存和发展所要解决的紧迫问题而传统能源已被过度消耗 ,因此,可再生能源的开发利用越来越受到重视和关注,其中风能具有分布广、储量大、利用方便、无污染等优点是最具大规模开发利用前景的新能源之一。 目前,变速恒频风力发电系统已经广泛用于实际风机中,在低于额定风速的情况下根据风速变化的情况调节风机转速,使其运行于最优功率点,从而捕获最大风能;在高于额定风速时,通过对桨距角的调节,使风机以额定功率输出。常用最大功率捕获方法主要有功率反馈 法、模糊控制法、混合控制法等。为了充分利用风能,提高风电机组的发电总量,本文分析风机特性及最大功率点跟踪(maximum pow er point tracking MPPT)工作原理。众多的MPPT实现方法各有千秋,对于不同的应用场所各有所长,对于多种方案,需要进行大量细致的实验工作和数据分析。 风能是一种具有随机性、不稳定性特征的能源,风能的获取不仅与风力发电机的机械特性有关,还与其采用的控制方法有关。在某一风机转速情况下,风速越大时风力机的输出功率越大,而对某一风速而言,总有一最大功率点存在。只有当风力发电机工作在最佳叶尖速比时,才能输出最大功率。好的控制方法可使风轮的转速迅速跟踪风速变化,使风力发电机始终保持在最佳叶尖速比上运行,从而最大限度地 2
获得风能。要保证最大限度地将捕获到的风能转化为电能,目前一般采用最大功率点追踪控制(MPPT)控制策略。最大功率点跟踪(MPPT)是在可变风速条件下提高风力机能量转换效率的有效方法。 变速风电系统目前一般采用最大功率点追踪(Maximum Power Point Tracking,MPPT)的控制策略。 3 2.设计 2.1 介绍对象(风力发电系统的最大功率点跟踪控制技术研究) 双馈风力发电系统最大功率点跟踪通常基于实验测定的最佳风速.功率一转速曲线,但在长期运行中系统参数的变化会使实际最大功率点偏离原曲线,影响最大功率跟踪效果。在分析风力机特性、双馈风力发电机数学模型及功率关系的基础上,提出了一种以向电网输出电能最大为目标、不依赖最佳风速.功率.转速曲线的最大功率点跟踪策略,实现了定子输出有功、无功解耦控制。仿真和实验证明,基于该方法,双馈风力发电系统在风速变化过程中能自动寻找并跟随最大功率点,且控制相对简单,运行可靠,有较高的实用价值。
2.2控制系统方案 2.2.1风力机最大功率点跟踪原理
根据贝茨理论,风力机从风中捕获的功率为
其中ρ 表示空气密度,β 表示桨距角, 表示风力机的风能
利用系数,R 是风轮的半径,ν 表示风速,λ 表示叶尖速比,ω 为风力机的角频率(rad/s)。 风能利用系数与叶尖速比之间的关系如图 2-1 所示。
4
图2-1 由上图可见,风能利用系数随着叶尖速比λ 的变化而变化。当时,即为风能利用系数的最大值。而叶尖速比,在风速变化时,相应地调节风轮的转速就可以将叶尖速比维持在处,此时风能利用系数为最大值 ,风力机对风能的捕获量最大,即运行在最大功率点上。 在不同的风速下,风力机的输出功率与风轮转速的关系,如图 2-2 所示,其中,P 表示风力机的输出功率,ω 表示风轮的转速,ω1 、ω2 、ω3 分别为风力机在风速为υ1 、υ2 、υ3 时相应于最大输出功率P1 、P 2、P3的风轮转速。由图 2-4 可以看出,在风速一定的情况下,输出功率随着风轮转速的变化而变化,其中存在着一个与最大功率点相对应的叶尖速比,此时的风能利用系数为最大值。在风速发生变化时,风力机最大功率点所对应的风轮转速也不同。 把不同风速下的风力机输出最大功率点相连,将得到一条曲线即为风力机的最大功率曲线。为了提高风力机的效率,在风速发生改变时,就必须对风力机实行变速控制,使其始终运行在最大功率曲线上。在风速变化时,通过调节风力机的转速,将叶尖速比维持在处,以确保风力机运行在最大功率曲线上,即为对风力机最大功率点的跟踪控制原理。 5
图2-2 风力机输出功率与转速的关系 图 2-3 为风速变化时,变速风力机对最大功率点的跟踪过程。在风速为 ν1 时,风力机运行于 A 点,为了追踪最大功率点 B,需要增加风力机风轮的转速ω 。
图2-3 风力机工作点的变化 当ω = ω1时,风力机运行于 B 点,A→B 的变化过程即为变速风力机在风速ν1 下,对最大功率点 B 的追踪过程。当风速从ν1 增加到ν3 时,风力机的运行状态将从 B 点跳变到 C 点,同样为追踪该风速下的风力机的最大功率点,需要增加风力机转速ω ,当ω =ω3时,风力机运行于对应风速ν3下的最大功率点 D 点,C→D 的变化过程即为变速风力机在风速ν3 下,对最大功率点 D 的追踪过程。同理,当风速从ν3 下降到ν2 时,风力机的运行状态从 D 点跳变到 E 点,而 E 点位于风速为ν2 时的风力机的最大功率点 F 6
点的右侧,所以应该减小风力机的转速ω 直到ω = ω2,此时风力机运行在最大功率点 F 点。E→F的变化过程是风力机在风速为ν2 时,对最大功率点的追踪过程。以上即为变速风力机在风速发生变化时对最大功率点的跟踪过程。 2.2.2风力机发电系统 双馈风力发电机数学模型及能量关系 同步旋转坐标系下的DFIG矢量方程 双馈电机在三相静止ABC坐标系是一个多变量、强耦合、非线性高阶系统。经过三相静止到两相旋转坐标变换后,同步旋转坐标系下的DFIG矢量模型如式(3)和式(4)所示。 u3=Rsis+pψs+jω1ψs ur=Rrir+pψr+jω3ψr (3) Ψr= Lmis+Lrir ψs=Lsis+Lmir (4) 式中 us, ur——定转子端电压矢量; is, ir——定转子绕组中的电流矢量; ψs, ψs——定转子绕组中的磁链矢量; ω1——发电机的同步角速度; ωs——转差角速度; Lms——定子互感; Lls——定子漏感 L1r——转子漏感。 且 Lm=1.5Lms;Ls=Lls+Lm;Lr=Llr+Lm。 根据式(1)和式(2)可得矢量形式的等效电 路如图1所示。 7
图1 DFIG矢量形式的等效电路 由于定子电压受到电网钳制,频率、幅值、相 位基本不变,因此可忽略定子磁链动态变化过程, 将电压方程式(4)降阶为式(6)。 Us=Rsis+jω1ψs ur=Rrir+pψr+jωsψr (6) 式(6)可作为变速恒频双馈电机风力发电矢量 控制依据,按照不同的定向方式可以得到不同的控制方案。 DFIG 运行时的功率分析 双馈电机由励磁电源和电网两边向电机供电, 由图 4 和式(4)可得绕线式双馈电机输入总有功功率为 P=Ps+Pr
=Re[usi*s]+Re[uri*r]
=RS|is|2+Rr|Ir|2+Re[Pψsi*s+Pψri*r]+Re[jw1ψsi*s+jw1ψri*r] =Pcu+Pf+Pe (8)