视觉定位与涂胶机器人的自主匹配
工业机器人视觉定位技术及应用研究

工业机器人视觉定位技术及应用研究摘要:将工业机器人的视觉技术应用到实际生产中,不仅可以减少操作员的工作量,还可以提高产品的制造效率,提高产品的加工精度。
在获取图像并确定其运动轨迹时,工业相机和工业机器人需要确定其相对位置关系,这需要对相机和工业机器人进行校准。
在完成校准后,可以获得工业机器人与工件之间的相对位置,然后通过轨迹规划等方法实现工业机器人与零件之间的相对运动,以实现预期的设计。
工业机器人视觉是一种基于工业相机的产品特征提取方法,它分析产品的形状、颜色等特征,并将其反馈给工业机器人。
关键词:工业机器人;视觉定位;技术引言工业机器人在一旦投入生产工作之后,对工作的条件和环境都有特别强大的应对能力和适应能力,主要表现在无论是生产多个批次的产品,还是生产多个品种的产品,都能够合理使用于生产中,这样一来不仅能够提高生产的品质,还能够全面提高生产工作的效率。
在原有工业机器人一体化技术的基础上,应用视觉定位技术可以更好地促进工业机器人更好地感知周围环境。
在实际工作中,它可以帮助他们有一个更平稳的工作速度,使他们能够更快、更全面地完成生产工作,确保工业机器人发挥更全面的作用。
1、工业机器人视觉标定的定位原理分析目前,复杂数学模型和非线性算法是工业机器人的主要标定算法。
它们主要根据相机的特定参数对关键参数进行变换矩阵运算,以减少机器人视觉校准中的潜在误差。
(1)视觉系统的组成。
光源组件、定位相机、镜头、视频图像采集卡和CTRL单元控制器是构成视觉系统的主要组件。
工业机器人的图像采集相对复杂,在这个过程中需要去噪,以获得更清晰的图像,并确保图像采集的有效性。
系统图像采集过程示意图如图1所示。
图1工业机器人视觉定位图像采集过程(2)提取工件信息。
工业机器人在进行视觉校准和定位时,必须从图像中提取被测物体的特征信息,存储被测物体数据信息,并对被测物体理论姿态进行数学求解。
2、工业机器人视觉定位技术应用2.1工业机器人视觉系统根据相机的安装位置,机器人视觉系统可以分为两部分:将摄像头固定在机器人的末端执行器上,眼科系统会跟随机器人的运动,但两者之间的相对位置保持不变。
机器人喷涂FANUC机器人标准LASD涂胶系统
机器⼈喷涂FANUC机器⼈标准LASD涂胶系统1.背景随着汽车⼯业的不断发展,涂胶技术在汽车制造⽅⾯的应⽤越来越⼴泛,为汽车向轻量化、⾼速节能、延长寿命和提⾼性能的发展发挥着重要作⽤。
涂胶⼯序直接关系到车⾝的密封防漏、耐蚀防锈、隔热降噪、外表美观性,因此对涂胶⼯艺有着严格的要求。
⽬前,出于减轻⼯⼈⼯作负担、提升⽣产节拍、降低⽣产成本的考虑,许多传统的⼯⼈⼿动涂胶的⼯序被机器⼈⾃动化施⼯所代替。
例如,机器⼈⾃动喷涂液态阻尼胶的应⽤(LIQUID APPLIED SOUND DEADENER以下简称LASD涂胶),是作为⼈⼯摆放沥青阻尼垫的替代品出现。
国内整机⼚绝⼤部分还是热熔型的沥青阻尼垫。
沥青阻尼垫由沥青(⽯油中提炼产物,⾼碳重质油),磁化铁粉等融合⽽成,吸附于车⾝钢板上,在烘炉内烘烤固化,起到隔⾳减振的功能。
由于沥青阻尼板在⾼温烘烤后,会持续挥发对⼈体有害的有机物,在健康越来越被消费者看重的环境下,⼚商转⽽寻找更加环保、健康的材料作为NVH阻尼材料。
⽽LASD涂胶在欧美等汽车⼯业发达国家于⼗⼏年前已⼴泛应⽤,是⼀种成熟的涂胶应⽤,适合采⽤机器⼈进⾏施⼯。
国内整车⼚仅在近⼏年才逐渐引⼊。
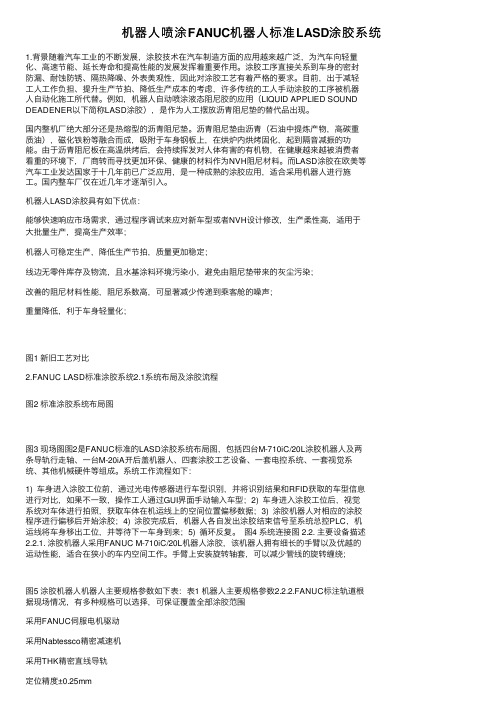
机器⼈LASD涂胶具有如下优点:能够快速响应市场需求,通过程序调试来应对新车型或者NVH设计修改,⽣产柔性⾼,适⽤于⼤批量⽣产,提⾼⽣产效率;机器⼈可稳定⽣产,降低⽣产节拍,质量更加稳定;线边⽆零件库存及物流,且⽔基涂料环境污染⼩,避免由阻尼垫带来的灰尘污染;改善的阻尼材料性能,阻尼系数⾼,可显著减少传递到乘客舱的噪声;重量降低,利于车⾝轻量化;图1 新旧⼯艺对⽐2.FANUC LASD标准涂胶系统2.1系统布局及涂胶流程图2 标准涂胶系统布局图图3 现场图图2是FANUC标准的LASD涂胶系统布局图,包括四台M-710iC/20L涂胶机器⼈及两条导轨⾏⾛轴、⼀台M-20iA开后盖机器⼈、四套涂胶⼯艺设备、⼀套电控系统、⼀套视觉系统、其他机械硬件等组成。
AGV移动机器人的五种定位技术介绍
AGV移动机器人的五种定位技术介绍AGV(Automated Guided Vehicle)移动机器人是一种自动导引车辆,能够在工业和物流领域进行物品运输和搬运任务。
为了准确定位AGV移动机器人的位置,可以采用多种定位技术。
下面将介绍五种常见的AGV定位技术。
1.激光定位技术:激光定位技术是一种通过激光扫描仪实现的定位方法。
它通过扫描周围环境并计算与物体的距离和角度来确定机器人的位置。
这种定位技术具有高精度和高可靠性的特点,适用于需要精确定位的场景,如仓库等。
2.视觉定位技术:视觉定位技术是一种使用摄像头和图像处理算法来确定机器人位置的方法。
它通过识别和匹配环境中的特征点或标志物来进行定位。
视觉定位技术具有较高的灵活性和适应性,可以适应不同环境和场景的变化。
3.超声波定位技术:超声波定位技术是一种使用超声波传感器来测量距离和方向的方法。
机器人通过发送超声波信号,并根据接收到的反射信号计算与物体的距离和方向,进而确定自身位置。
这种定位技术需要在环境中设置超声波信号源,适用于开放空间和室内场景。
4.地磁定位技术:地磁定位技术是一种通过检测地球磁场强度和方向来进行定位的方法。
机器人搭载磁力计和罗盘传感器,通过测量环境中的地磁场来确定自身位置。
地磁定位技术具有较高的稳定性和精度,适用于室内和地下场景。
5.惯性导航定位技术:惯性导航定位技术是一种使用加速度计和陀螺仪等惯性传感器来确定机器人位置的方法。
它通过测量机器人的加速度和角速度来计算和集成运动路径,并推算出位置。
惯性导航定位技术具有较高的实时性和灵活性,适用于复杂环境和短距离运动。
这些AGV定位技术各有优劣,可以根据不同的应用场景和需求选择合适的技术。
在实际应用中,也可以将多种定位技术进行组合和协同,以提高定位的精度和鲁棒性。
随着技术的不断进步,AGV定位技术将会越来越成熟和普及。
基于双目视觉机器人自定位与动态目标定位

基于双目视觉机器人自定位与动态目标定位卢洪军【摘要】Aiming at the fact that, the mobile robot based on binocular vision is very easy to be disturbed by the complex environment, such as the influence of noise, illumination change and the occlusion of the robot, which will seriously affect the positioning accuracy of the self localization and the moving objects, the color feature of the HSV model is proposed to accurately segment the artificial landmarks, and the robot position is determined according to the principle of parallax.A method was proposed based on Harris operator which is accurate to the position of a moving object in a complex environment.The dynamic object is detected by the frame difference method.Harris operator was used to extract the feature points on the moving objects, so as to obtain the disparity value, and then to calculate the position of the moving objects.The experimental results show that the self localization and target localization can overcome the external disturbance and have strong adaptability by using this method.The algorithm has good real-time performance.%针对基于双目视觉自定位与动态目标定位极易受复杂环境(如噪声、机器人发生遮挡、光照变化等)的干扰导致移动机器人定位精度低的问题,提出基于HSV颜色模型特征准确分割出人工路标,根据视差原理确定机器人位置.同时提出一种双目机器人基于Harris算子实现在复杂环境下对动态目标精确定位的方法,利用帧间差分法将运动目标检测出来,采用Harris算子在该运动目标上提取特征点,并获得视差值,从而精确的计算出运动目标的位置.实验结果表明,利用该方法进行自定位与目标定位能够克服外界干扰,具有较强的适应性,且算法的实时性好.【期刊名称】《沈阳大学学报》【年(卷),期】2017(029)001【总页数】6页(P37-42)【关键词】双目视觉;目标定位;Harris算子;帧间差分法;HSV模型【作者】卢洪军【作者单位】沈阳工业大学信息科学与工程学院, 辽宁沈阳 110870【正文语种】中文【中图分类】TP391.420世纪末,对目标定位技术主要有基于红外线的定位技术、基于超声波的定位技术和基于频射识别技术等[1].近年来,由于图像处理和计算机视觉的飞速发展,机器视觉的研究越来越受到广大专家和学者的青睐[2].双目立体视觉是机器视觉的一个重要分支,能够直接模仿人类双眼处理外界环境[3],可以代替人类完成危险的工作(如深海探测、火灾救援、核泄漏监测等)[4].而基于双目立体视觉对动态目标检测与定位也是机器视觉领域备受关注的前沿课题之一[5].双目立体视觉定位主要分为六个步骤[6]:①图像获取;②图像预处理;③摄像机标定;④特征点提取;⑤特征点的立体匹配获取视差值;⑥基于视差原理实现机器人定位.特征点提取和立体匹配是实现机器人定位的关键环节.通常的方法是依靠目标的形状、颜色等特征检测目标,并以运动物体的形心或中心作为特征点[7].该方法虽然计算简单,但极易受噪声干扰,只选择一个点作为特征点,一旦该特征点发生遮挡或光照变化等,都会严重影响定位精度.1977年,Moravec提出根据图像的灰度变化来提取图像角点,称为Moravec角点[8].该方法计算相对简单,但对于处于边缘上的点会存在误检,也极易受光照变化的影响.SIFT特征点[9]和CenSurE特征点[10]虽然对尺度、亮度变化不敏感,但在弱纹理等复杂情况下难以提取稳定的特征点,算法复杂度高,计算时间较长.不满足移动机器人对实时性的要求.针对以上缺陷,本文首先利用帧间差分法检测出运动目标,然后在运动目标上基于Harris算法提取多个特征点来实现移动机器人在复杂环境下实时的对运动目标精确定位.机器人整体定位流程如图1所示,移动机器人首先基于HSV颜色模型空间分割出人工路标,实现机器人自定位.然后利用帧间差分法检测出运动目标,根据Harris算法在左右两幅图像上提取特征点,根据区域匹配原理获取视差值,利用视差原理即可求出运动目标的世界坐标,即完成了对运动目标的定位.1.1 人工路标检测(1) HSV颜色模型.RGB色彩空间分别以红色、绿色、蓝色为三原色,通过适当的搭配可以合成成千上万种颜色,是一种常见的颜色表示法.但是RGB色彩空间与人眼的感知差异大,其空间的相似不代表实际颜色的相似.为了能够更准确分割出人工路标,本文采用HSV色彩空间颜色模型,如图2所示.RGB颜色空间转化到HSV色彩空间只是一个简单的非线性变换,计算简单.HSV模型中H代表色调,S代表饱和度,并且独立于亮度信息V.色调H代表颜色信息,取值范围为0~180°,对其设定阈值可以区分不同颜色的路标;饱和度S表示颜色中掺杂白色的程度,取值范围为0~1,S 越大,颜色越深;亮度V表示颜色的明暗程度,取值范围为0~1,V越大,物体亮度越高.(2) 基于颜色特征提取人工路标.由于本文是在室内环境下对移动机器人定位,所以本文设计的人工路标是由红黄蓝三种颜色组成的矩形纸板.如图3a所示为左摄像机拍摄到的带有人工路标的室内环境.根据HSV颜色模型对H、S、V三个分量进行阈值设置即可分割出人工路标,如图3b所示.然后利用图像处理中的形态学操作对分割出的路标进行完善使其效果最佳,如图3c所示.图3d为获取人工路标的中心点,利用视差原理即可得到当前帧机器人的位置.1.2 帧间差分法帧间差分法[11]的思想是对一段连续视频的相邻两帧进行差分运算,从差分运算的结果中得到运动目标的轮廓.该算法的优点是实现简单,对光照变化不敏感,稳定性好.适用于多目标或背景变化较快的场合.图4为在室内环境下用帧间差分法检测到运动物体.结果显示,帧间差分法能够有效的将运动目标检测出来.2.1 双目立体视觉测距原理双目立体视觉的视差原理[12]是利用两台摄像机从两个视点观察同一景物,以获取在不同视角下的感知图像,通过计算空间点在两幅图像中的视差来获取目标物体的三维坐标.2.2 Harris角点检测Harris角点[13]是在Moravec角点的基础进行改进的算法. Harris算子是用高斯函数代替二值窗口函数, 对离中心点越远的像素赋予越小的权重, 以减少噪声的影响. 高斯函数如式(1)所示.Moravec算子只考虑了四个方向的像素值,Harris算子则用Taylor展开式去近似任意方向.图像I(x,y)平移(Δx,Δy)可以一阶近似为在图像I(u,v)中,像点(u,v)平移(Δx,Δy)后的自相关函数为将式(2)代入式(3)可得:其中M如下所示:根据式(5)中矩阵M的特征值可以近似的表示函数C(x,y)的变化特征.矩阵M的特征值需要考虑以下三种情况,如图5所示.(1) 如果矩阵M的两个特征值都比较小,则表征图像灰度变化函数C(x,y)的值也较小,就说明该像素点的邻域内灰度差值不大,图像较平滑,无角点.(2) 如果矩阵M的两个特征值一个较大,一个较小,说明该像素点的曲率也是如此,则该点的窗口区域处于一条边界,无角点.(3) 如果矩阵M的两个特征值都比较大,则图像灰度变化的自相关函数值也较大,该点的窗函数沿任意方向都将引起灰度的剧烈变化,该点即为角点.根据这一准则,只要计算行列式的特征值就可以检测图像中的哪些点是角点.Harris 提出角点的响应函数:det(M)为行列式的值,trace(M)为行列式的迹.而k根据Harris的建议一般取0.04~0.06之间.若Harris角点响应大于阈值,则被认为是角点.Harris角点的生成只涉及到一阶导数,所以该角点对噪声影响、光照变化引起的灰度值变化都不敏感,是一种比较稳定的特征提取算子.3.1 实验环境本文使用的机器人是由北京博创兴盛技术有限公司开发的自主移动机器人旅行家Ⅱ号,如图6所示.该机器人上安装了由加拿大Point Grey Research公司生产的Bumblebee2双目摄像机,其性能参数如表1所示.3.2 传统移动机器人对运动目标定位实验环境为一间办公室,装有双目摄像机Bumblebee2的移动机器人为工作机器人,用于检测运动目标.将另一台机器人视为运动目标,运动速度为0.1 m/s.传统的方法是提取运动目标的中心点,获取视差值,从而给运动目标定位.传统方法仅获取图像中的一个点作为立体匹配的特征点,当该点受到环境的干扰时定位精度会受到极大的影响,图7为传统方法提取运动目标中心点.表2为传统方法对运动目标定位的实验数据,表3为改变光照后传统方法移动机器人对运动目标定位的实验数据.可以得出传统方法机器人定位误差相对较大,一旦光照发生改变,对运动物体定位误差会更加严重.3.3 基于Harris算子机器人对运动目标定位针对传统方法定位精度不足,极易受外界环境的干扰的问题,决定采用基于Harris角点特征提取,即在相机获得的左右两幅图像上基于Harris算子提取多对特征点,如图8所示.表4、表5为基于Harris方法机器人对运动目标定位的实验数据,可以得出基于该方法对运动目标定位误差很小,相对误差降低到1%左右,当光照发生变化时也能实现对运动目标精确定位.最后将每一帧的两幅图像根据区域匹配原理[14]和极限束准则找到正确的匹配点,排出易受噪声干扰的点,从而得到视差值,即可准确的对运动目标定位.(1) 本文研究了机器人基于双目立体视觉实现自定位与对运动目标定位,充分利用双目视差原理,并结合Harris算法和帧间差分法来实现运动目标的精确定位.从仿真结果可以看出,提取多个特征点可以避免只用一个点易受干扰的不足,实现更精确的运动目标定位.(2) 虽然本文在运动目标上提取多个特征点,有效的克服了传统方法的不足.但还存在问题需要改进.首先,需要找到一种更快更准确的特征点立体匹配算法;其次,本文只是将每一帧图像得到的多个视差值做平均值处理,如何有效的将多个视差值融合也是对运动目标精确定位的关键.【相关文献】[1] 李艳. 双视频目标定位技术[J]. 沈阳大学学报(自然科学版), 2016,28(4):302-305. (LI Y. Dual video target location technology[J]. Journal of Shenyang University(Natural Science), 2016,28(4):302-305.)[2] 李天健. 基于机器人视觉的汽车零配件表面缺陷检测算法研究与实现[J]. 沈阳大学学报(自然科学版), 2013,25(6):476-480. (LI T J. Research and implementation of auto parts surface defect detection algorithm bases on robot visio[J]. Journal of Shenyang University (Natural Science), 2013,25(6):476-480.)[3] 杜宇. 三维重建中双目立体视觉关键技术的研究[D]. 哈尔滨:哈尔滨理工大学, 2014:1-5. (DU Y. Research on key technology of binocular stereo vision in three-dimensional reconstruction[D]. Harbin:Harbin University of Science and Technology, 2004:1-5.)[4] 余俊. 基于双目视觉的机器人目标检测与控制研究[D]. 北京:北京交通大学, 2011:1-4. (YU J. Research on target detection and robot control based on binocular vision[D]. Beijing: Beijing Jiaotong University, 2011:1-4.)[5] DESOUZA G N, KAK A C. Vision for mobile robot navigation: A survey[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2002,24(2): 237-267.[6] 高栋栋. 基于双目立体视觉定位和识别技术的研究[D]. 秦皇岛:燕山大学, 2013:9-11. (GAO D D. Research on recognizing and locating binocular stereo vision technology[D]. Qinhuangdao:Yanshan University, 2013:9-11)[7] 崔宝侠,栾婷婷,张弛,等. 基于双目视觉的移动机器人运动目标检测与定位[J]. 沈阳工业大学学报, 2016,38(4):421-427. (CUI B X, LUAN T T, ZHANG C, et al. Moving object detection and positioning of robot based on binocular vision[J]. Journal of Shenyang University of Technology, 2016,38(4):421-427.)[8] 邓国栋. 基于多尺度特征的双目立体视觉目标定位[D]. 哈尔滨:哈尔滨工业大学, 2012: 21-22. (DENG G D. Object location of binocular stereo vision base on multi-scale feature[D]. Harbin: Harbin Institute of Technology, 2012:21-22.)[9] LOWE D G. Distinctive image feature from scale-invariant key point[J]. International Journal of Computer Vision, 2004,60(2):91-110.[10] KONOLIGE K, AGRAWAL M, SOLA J. Large-scale visual odometry for roughterrain[C]∥Robotics Research: The 13thInternational Symposium ISRR, 2011,66:201-212.[11] 熊英. 基于背景和帧间差分法的运动目标提取[J]. 计算机时代, 2014(3):38-41. (XIONG Y. Moving object extraction based on background difference and frame differencemethod[J]. Computer Era, 2014(3):38-41.)[12] 林琳. 机器人双目视觉定位技术研究[D]. 西安:西安电子科技大学, 2009:8-10. (LIN L. The research of visual positioning technology on the binocular robot[D]. Xi’an: Xi'an Electronic and Science University, 2009:8-10.)[13] 张从鹏,魏学光. 基于Harris角点的矩形检测[J]. 光学精密工程, 2014,22(8):2259-2266. (ZHANG C P, WEI X G. Rectangle detection base on Harris corner[J]. Optics and Precision Engineering, 2014,22(8):2259-2266.)[14] 罗桂娥. 双目立体视觉深度感知与三维重建若干问题研究[D]. 长沙:中南大学, 2012:48-53. (LUO G E. Some issues of depth perception and three dimension reconstruction from binocular stereo vision[D]. Changsha: Central South University, 2012:48-53.)。
机器人视觉导航中的SLAM算法应用教程

机器人视觉导航中的SLAM算法应用教程导语:随着人工智能技术的不断发展,机器人逐渐成为各个领域中不可或缺的工具。
机器人视觉导航是机器人实现自主移动和环境感知的关键技术之一。
而同样重要的是,SLAM(Simultaneous Localization and Mapping)算法的应用。
本篇文章将向大家介绍机器人视觉导航中的SLAM算法应用教程,帮助读者了解SLAM算法的原理和应用。
一、什么是SLAM算法SLAM,即同时定位与地图构建,是指在未知环境中,机器人实时地建立自身的地图,并通过自身感知的信息进行定位与路径规划。
SLAM算法是目前机器人自主导航和环境建模的基础。
SLAM算法的核心思想是通过传感器获取环境的感知信息,同时估计机器人自身的位置和姿态,从而实现对环境的建模和导航。
常用的传感器包括摄像头、激光雷达、超声波传感器等。
SLAM算法可以分为基于滤波和基于优化的方法。
滤波方法采用递推的方式在更新机器人位姿和地图,其中常用的滤波算法有扩展卡尔曼滤波(EKF)和粒子滤波(PF)。
优化方法则采用迭代优化的方式,通常使用最小二乘法进行参数优化,如图优化算法和非线性优化算法。
二、机器人视觉导航中SLAM算法的应用场景1. 室内导航机器人在未知的室内环境中实现自主移动和路径规划是目前SLAM算法的主要应用场景之一。
机器人通过摄像头或激光雷达等传感器获取环境的信息,通过SLAM算法实现自身位置和地图的实时更新,从而实现室内导航。
2. 建筑物巡检机器人用于建筑物的巡检和监控是SLAM算法的另一个重要应用场景。
机器人通过将建筑物的平面进行扫描并使用SLAM算法进行建图,可以实时检测建筑物的结构和安全问题,并提供状态反馈和报警。
3. 无人驾驶无人驾驶是SLAM算法的一个热门应用领域。
无人驾驶汽车通过激光雷达和摄像头等传感器获取道路和周围环境的信息,利用SLAM算法实时估计自身的位置和姿态,并规划行驶路径,从而实现自动驾驶。
基于模板匹配的视觉定位技术研究与应用

3、多模态信息融合:在现实场景中,往往同时存在多种类型的视觉信息(如 文字、图形、人脸等)。因此,未来的研究可以尝试将多模态信息进行融合, 从而更加全面地提取出视觉中的有用信息。
4、跨领域应用拓展:目前基于模板匹配的视觉定位技术已经在多个领域得到 了应用。然而,仍有诸如艺术鉴赏、遥感图像分析等众多领域尚未得到充分应 用。
未来展望
基于模板匹配的视觉定位技术在当前的应用中已经取得了显著的成果,未来的 发展也将会更加广泛和深入。以下是几个可能的研究方向:
1、高性能计算资源的利用:随着计算能力的提升,未来可以考虑使用更强大 的计算资源来提高模板匹配的效率和精度。例如,利用GPU等加速器可以加速 图像处理的速度。
2、深度学习技术的融合:目前基于模板匹配的视觉定位技术主要依赖于传统 的图像处理方法。然而,随着深度学习技术的不断发展,未来的研究可以尝试 将深度学习技术融入到视觉定位过程中,从而进一步提高匹配的精度和鲁棒性。
应用场景
基于模板匹配的视觉定位技术在多个领域都有应用,以下是几个主要应用场景 的介绍。
1、机器人导航
在机器人导航领域,基于模板匹配的视觉定位技术可用于实现机器人对环境的 感知和定位。例如,机器人可以通过拍摄周围环境的图片,与预先存储的模板 图片进行匹配,从而确定自身的位置和方向。
2、智能家居控制
基于模板匹配的视觉定位技术研究与应 用
01 引言
03 应用场景 05 未来展望
目录
02 技术原理 04 案例分析
引言
在当今的计算机视觉领域,基于模板匹配的视觉定位技术具有广泛的应用前景。 这种技术通过在目标图像中寻找与模板图像相匹配的特征,从而实现目标定位。 它在机器人导航、智能家居控制、视频监控等领域都具有重要的实用价值。本 次演示将详细阐述基于模板匹配的视觉定位技术原理,介绍其应用场景,并通 过具体案例进行分析,最后对未来发展进行展望。
机器人涂胶系统原理与维护技术

机器人涂胶系统原理与维护技术机器人涂胶系统采用机器人进行自动化涂胶,能够提高涂胶的精度和效率,广泛用于汽车制造和其他工业领域。
本文将介绍机器人涂胶系统的原理和维护技术。
机器人涂胶系统由涂胶机、机器人、控制器和反馈系统组成。
涂胶机用于储存和喷出胶水,机器人用于在零件表面涂胶,控制器用于控制机器人和涂胶机的动作,反馈系统用于监测涂胶的质量。
1. 涂胶机涂胶机主要由胶水箱、涂胶枪和压缩空气系统组成。
胶水箱用于储存和加热胶水,涂胶枪用于将胶水喷涂到零件表面,压缩空气系统用于提供压缩空气使胶水喷出。
2. 机器人机器人有不同种类,包括SCARA机器人和6轴机器人。
机器人的任务是将涂胶枪定位在正确的位置上,在零件表面按照预定的路径涂胶。
3. 控制器控制器用于控制机器人和涂胶机的动作,包括控制机器人的坐标和动作速度,控制涂胶机喷涂胶水的速度和压力。
4. 反馈系统反馈系统用于监测涂胶的质量,包括记录涂胶的厚度、均匀性和湿度。
涂胶机需要经常清洗以防止胶水堵塞喷嘴。
在清洗时,需要先将涂胶枪从机器人上卸下,然后清洗喷嘴和内部管道。
清洗时使用清水和清洗液,不要使用酸性和腐蚀性的物质。
清洗后需进行干燥。
机器人需要进行定期的维护以确保其正常运行。
维护包括对机器人的润滑和清洁,包括清洁移动部件和涂胶枪零部件,检查并更换不正常的零部件。
控制器需要定期调整以确保机器人和涂胶机的协调运行。
调整包括对机器人的位置、速度和精度进行校准,对涂胶机的喷胶速度和压力进行调整。
反馈系统需要定期监测,包括检查涂胶厚度、均匀性和湿度。
如果发现问题,应立即采取措施解决。
机械手视觉定位方法【秘籍】

视相机标定-特征点旋转法在机械手的旋转轴的固定支架上安装一个针尖。
针尖越细越好,越垂直标定结果越精确。
用机械手移动使针尖在相机视野内显示出针尖这个特征点。
先将特征点移到图像的角落处拍照,将机械手坐标记录,然后只移动机械手的X坐标和Y坐标将特征点移到相机拍照中心附近进行拍照,记录机械手坐标。
最后不动机械手的X 坐标和Y坐标,只改变机械手的角度,然后每改变一次就拍照记录一次,大概再抓取4到6个只改变角度拍照记录的数据点。
俯视相机标定-针尖对点法将机械手的旋转轴上的吸头和相机固定机构都拆除,然后装上机械手标定使用的针尖。
针尖越细越好,越垂直标定结果越精确。
要确保针尖和机械手旋转轴的同轴度。
先将机械手移动到一个合适的拍照位置,记录下机械手标定拍照位坐标,然后在标定纸上画出此时相机拍照的范围。
移动机械手,让针尖在标定纸的拍照范围内按照九宫格点出九个点,并按顺序记录各个点的机械手坐标。
将针尖拆掉,换回吸头和相机机构,移动到标定拍照点使用相机拍照,然后在图像里面抓取九点的像素坐标,和机械手坐标一一对应,针尖对点法标定完成。
背景技术:随着工业社会的发展,越来越多的制造业需要大量的工人来从事机械生产。
而且有的工业生产工序对工人的要求较高。
但是随着中国生育率的降低,人口越来越少,这样就产生了一个矛盾,使得大量的地区产生了用工荒。
因此,有的公司采用自动化生产线进行工业生产,然而这样的自动化生产线,生产过程中当工件产生移位时,容易产生误操作。
技术实现要素:基于此,有必要提供一种不易产生误操作的视觉定位机械手。
一种视觉定位机械手,包括控制器、机械臂组件与图像传感器,所述机械臂组件包括依次转动连接的底座、第一机械臂、第二机械臂与第三机械臂,所述控制器安装于所述底座内,所述图像传感器安装于所述第三机械臂上,并与所述控制器电性连接,用于将工件的图像传输给所述控制器以供所述控制器判断工件是否移位。
在其中一个实施方式中,所述第三机械臂的末端设置有夹持工具,所述夹持工具为夹持气缸。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
论文
论文题目
视觉定位系统与涂胶机器人的自主匹配
论文
提出背景
一汽大众轿车二厂涂装车间建于2003年7月,于2005 年12月投入生产。其中PVC生产线采用了当时最先进的 VMT视觉定位系统与FANUC机器人匹配实现车身底板的 自动涂胶。设备建造和调试均由德国EISENMANN公司承 包,其中视觉系统和机器人的匹配由于技术复杂,难度大, 后续每次上新车型,都需要承包给德国公司,不仅实施周 期长,售后服务不及时,且花费大笔的规划费用。因此理 解和掌握并最终实现视觉系统和机器人的自主匹配就是非 常急迫的并且很有必要。
论文
具体实施方法与步骤
机器人 摄像头 机器人直线轨道
激光测量仪
现场布局及工作过程示意
返回
论文
具体实施方法与步骤
4. 视觉定位系统与机器人的匹配
为了实现机器人涂胶轨迹能够跟踪车壳位置的变化,我们 需要将车壳坐标系定义为机器人的一个user坐标系,由上述 2.2中描述的我们利用激光测量仪可以得出TC0-R ,即车壳0 在机器人坐标系中的位置,我们就把这个位置定义为机器人的 一个user坐标系。这样我们只需要把视觉系统所得出的TCnC0补偿到机器人相应的user坐标系中,机器人就会自动修改 涂胶轨迹,实现精准涂胶。
论文题目
视觉定位与涂胶机器人 的自主匹配
自我评价
工作业绩
本人来自一汽大众轿车二厂涂装车间维修工段,目前担任维 修乙班班长。2004年到公司实习,2005年转正。工作以来我积 极主动的学习各种专业技术知识,不断增强自己的技术能力。 曾主导实施并完成了一汽大众几款车型在轿车二厂涂装车间 PVC线的自主匹配工作(包括机器人匹配和视觉定位系统匹配)。 并由于在迈腾车型自主匹配工作中的出色表现,于2008年获得一 汽集团自主创新贡献奖,得到公司的认可。
论文
具体实施方法与步骤
(2)摄像头测量值误差对机器人的影响 虽然摄像头测量的误差不大,但是要直接发送给机器人的话 还是会对机器人涂胶精准度有影响。而我们的视觉系统发送给机 器人的是相对值,即车壳n相对于车壳0的位置变化。由于摄像头 测量车壳n和车壳0时都存在误差,俩次误差值相互抵消,所以发 给机器人的相对值还是很准确的。 经过上述研究,我们利用摄像头测量车壳的位置,成功实现 了后续车型上线时,机器人与视觉系统的自主匹配。
论文
具体实施方法与步骤
Tool
User World
fanuc机器人坐标示意图
论文
具体实施方法与步骤
5.自主实现视觉定位系统和机器人的匹配
(1)摄像头测量替代激光测量仪
实现视觉定位系统和机器人的匹配,需要用到激光测量仪,可是此设备 是厂家的核心设备,每次调试都需要从德国空运到中国。如果我们要自己调试 的话,厂家是不可能借给我们的。此设备价值一百多万,自己购买又需要大笔 费用。所以要实现视觉定位系统和机器人的自主匹配,就需要绕过激光测量仪。 经过研究我们发现,只要在设备第一次调试时,标定好摄像头和机器人后,车 壳的位置就可以通过摄像头测出来。由于摄像头和机器人相对于工作间是固定 的,在后续车型上线的时候,就可以使用第一款车型上线时机器人和摄像头的 的数据,车壳的位置通过摄像头测量可以得出。这样的话就可以不用激光测量 仪实现后续车型的自主调试。但是摄像头测量的车壳位置需要经过图像的识别 和计算,就会存在一定的误差。
自我评价
技术革新
本人工作过程中积极探索、勇于创新。经过刻苦学 习和专研,打破外方技术垄断,成功实施了迈腾、新宝 来、CC等车型及其改脸换代车型在PVC涂胶机器人线 的自主匹配,为公司节省了大笔规划费用。同时由于省 去了很多中间环节,大大缩短了调试周期。也为后期设 备出现故障的快速解决创造了有利条件。
自我评价
技术革新
平时工作中更是积极努力,锐意进取。主导或配合 实施了PVC机器人管路保温改造、PVC门槛机器人喷枪 改造、顶盖机器人清洗液自动保持系统、视觉系统工控 机备件一机多用配置、翻转车新增维修轨道改造、翻转 车新增操作台改造等许多大的技改项目。并累计提出并 实施合理化建议五十条以上,为公司节省大量资金的同 时,也大大降低了停台时间。
论文
本人承担的任务及担任角色
在整个项目实施期间,本人开展了大量基础理论的研究工作, 建立了整个项目的理论基础,并负责所有视觉定位系统配置工 作,包括图像获取、特征点坐标获取、特征点模板识别和学习、 3D向量计算设置等。在完成上述工作的同时,积极组织同事实 施机器人的编程、配置,车壳调配等工作。对项目的圆满完成 起到积极主导的作用。
论文
模板
参考点
搜索区域
当前图像 „最佳“ 匹配
论文
论文
具体实施方法与步骤
3. 视觉定位系统3D向量计算
利用激光测量仪先分别测量出4个摄像头在工作间坐标系中的位置,称为 摄像头的标定。同样的方法得出机器人在工作间坐标系中的位置,我们记为 TR-G。当有新车型上线时,用激光测量仪测量车壳0的特征点(这些特征点在 车壳坐标系中的位置通过车壳3维数据已知),就可以计算出车壳0在工作间 坐标系中的位置,我们记为TC0-G 。由TR-G 和 TC0-G可以得出TC0-R ,也就是车壳0 在机器人坐标系中的位置。这样,当有第n辆车壳n到位后,利用摄像头测量 车壳n的特征点,由于摄像头已标定过,我们就可以得到车壳n在工作间坐标 系中的位置TCn-G 。由TC0-G 和 TCn-G可以计算出TCn-C0 ,即车壳n相对于车壳0的 位置变化,将此结果发送给机器人,由于机器人已知TC0-R,就可以计算出TCnR 。这样机器人就知道了第n辆车壳在机器人坐标系中的位置变化,根据此结 果调整机器人的涂胶轨迹就可以实现精准涂胶。
自我评价
传授技艺
本人工作期间乐于帮助别人,累计教授徒弟9人。创造性的 运用“看、听、画、讲”的方法带领徒弟积极学习研究设备 知识。在此过程中一直为人师表、严于律己,在教授技术的 同时对他们的做人提出严格要求。为公司培养出一批有知识、 有能力的技术工人。 部分徒弟现已在公司的三厂、四厂工作,表现优秀。并于 2011年获得公司四厂颁发的”金牌师傅”荣誉称号。能够为公司 技术人才的储备做出自己的贡献我感到非常高兴和自豪。
论文
取得的成果
在整个项目实施的过程中,我们积极探索,勇于创新。用自 己的方法成功实现了涂胶机器人与视觉定位系统的自主匹配,为 公司节省了大笔资金。而且由于省去了很多中间环节,大大缩短 了调试周期。也为后期设备出现故障的快速解决创造了有利条件。 并因此在集团公司“我为做强自主建功留名竞赛”活动中获得 “自主创新贡献奖”。 这次项目的实施,不但让我学到了许多理 论知识,还提高了我处理实际问题的能力,锻炼了我的思维。学 会了更多知识,充实了自己。巩固了自己技术能力的同时还增强 了我们团队合作解决问题的能力。项目实施期间我也遇到了不少 困难,但通过公司领导和同事们的帮助,最终克服了这些困难, 完成了任务。
模拟图
论文
具体实施方法与步骤
1. 视觉定位系统获取图像
图像获取也就是图像的数字化过程,即将 图像采集到计算机中的过程。 在自然的形式下,图像并不能直接由计算机分析。因为计算机只能处理数 字而不是图片,所以一幅图像在用计算机进行处理前必须先转化为数字形 式。图像转化为数字形式的方法是将物理图像经过采样划分为称作图像像 素的小区域。最常见的划分方案是方形采样网格,图像被分割成由相邻像 素组成的许多水平线。经过采样后的图像还不是数字图像,因为这些像素 上的灰度值仍是一个连续量,必须进行量化。所谓量化就是将每个像素的 亮暗程度用一个整数值来表示,即像素的灰度离散化。完成上述转化后, 图像被表示为一个整数矩阵。每个像素具有两个属性:位置和灰度,此数 字矩阵就作为计算机处理的对象。在采样和量化处理后,才能产生一张数 字化的图像。
论文
具体实施方法与步骤
2. 视觉定位系统识别特征点
模板识别就是从图像中找出与已知模板相似的目标模板, 即识别出物体并确定出它在整幅图像中的位置和方向,是计 算机视觉系统中的关键和难点。 直接利用原始模板的灰度信息进行匹配。这是基于在输 入图像的搜索区域内一个像素一个像素的移动,每移动一次 都把模板和输入图像每个对应像素的灰度值差进行计算,直 到该搜索区域内所有像素点都对比完毕,其中灰度值差最小 的位置,就认为该模板在图像中的位置,即模板被识别出来。
论文
PVC底板自动涂胶生产线
论文
拟实现目标
1.通过研究视觉系统的图像处理,特征点识别,模板库 的学习以及坐标系统的形成,进一步理解和掌握VMT视 觉软件。 2.由于涉及到与机器人的匹配及坐标变化,所以可以更 深刻的理解机器人的坐标变换原理和机器人程序运行方 式。 3.最终在新车型上线时,实现视觉定位系统与机器人的 自主匹配,为公司节省大笔外包费用。