微位移技术
电感式微位移测量电路
- III -
哈尔滨理工大学学士学位论文-------------电气学院周三强
目录
摘要 .................................................................................................................. I Abstract............................................................................................................ II 第 1 章 绪论 ................................................................................................... 1 1.1 本文的背景及意义 ............................................................................... 1 1.2 国内外的研究现状 ............................................................................... 1 1.3 本文的主要研究内容 ........................................................................... 3 第 2 章 电感式微位移测量电路硬件设计 ..................................................... 4 2.1 电感式传感器工作原理........................................................................ 4 2.1.1 电感式传感器简介......................................................................... 4 2.1.2 自感式传感器工作原理 ................................................................. 4 2.1.3 互感式传感器工作原理 ................................................................. 6 2.2 电路的总体设计 ................................................................................... 8 2.3 主要芯片说明 ....................................................................................... 8 2.3.1 STC 单片机 ..................................................................................... 8 2.3.2 OP07 集成运放 ............................................................................... 9 2.4 放大电路的设计 ................................................................................... 9 2.4.1 集成运算放大电路......................................................................... 9 2.4.2 差动放大电路 .............................................................................. 11 2.5 改进的相敏整流电路的设计 .............................................................. 13 2.5.1 典型整流电路 .............................................................................. 13 2.5.2 改进的相敏整流电路................................................................... 14 2.6 稳压电路的设计 ................................................................................. 16 2.7 低通滤波器的设计 ............................................................................. 17 2.8 A/D 采样电路设计............................................................................... 18 2.9 本章小结............................................................................................. 20 第 3 章 软件仿真及系统调试....................................................................... 21 3.1 Multisim 10 仿真软件简介 .................................................................. 21 3.2 系统软件的设计 ................................................................................. 21 3.3 硬件电路的仿真结果及分析 .............................................................. 22 3.4 系统的调试 ......................................................................................... 26 3.5 本章小结............................................................................................. 27 结论 ............................................................................................................... 28 致谢 ............................................................................................................... 29
微热弯成形的微位移计算机视觉测量方法
程序 并 计 算 摄 像 机 的 内外 参 数 , 用 利 O eC 对 被 测 对 象的 图像 进 行 灰 度 化 、 pnV 二 值 化 和 C ny边 缘 提 取 , 用 序 贯 相 an 采 似 性 检 测 算 法 ( S A) 行 模 板 匹 配 , SD 进 实
现 了热 弯 曲成 形 过 程 中模 具 与 工 件 位 置
微 位 移 的 实 时在 线 检 测 . 实验 结 果 表 明 , 该 系统 对 微 位 移 的 测 量 具 有 操 作 简 单 、 高效 的 特 点 . 关 键 词 微 位 移 ; 觉 测 量 ;a n 视 C n y边 缘 检 测 ; 序 贯 相 似 ; pn V( 算机 视 觉 开 放 库 ) O eC 计 中 图 分 类 号 T 3 14 P9.1
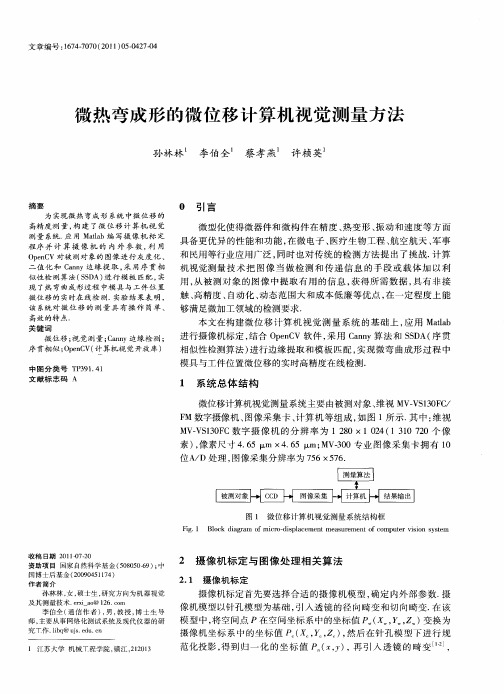
图 1 微 位 移 计 算 机 视觉 测 量 系 统 结 构 框
Fg. Bl c a r m fmir ds lc m e e s r m e fc m p e iin s se i 1 o k dig a o co— ip a e ntm a u e nto o utrvso y t m
.
得 到规 范 化坐 标值 P ( , , 后 转换 为 图像平 面 他 点对 的 差值 累加 起 来 , 累加 次误 差 超 过 阈值 Y ) 最 当 上 像 素坐标 系 中坐标值 P ( , ] u ) : 则停 止 累加 , 并记 下 累加 次数 R, 义 S D 的检 定 SA
摄像 机标 定首 先要 选择 合 适 的摄像 机 模 型 , 定 内外 部 参 数 . 确 摄 像 机 模 型以针 孔模 型为 基 础 , 入 透镜 的径 向 畸变 和 切 向 畸变 . 该 引 在
模 型中, 将空 间点 P在 空 间坐标 系 中 的坐标值 P ( r , 变换 为 X ,w Z ) 摄像 机 坐标 系 中 的坐标 值 P.X , , , . Z ) 然后 在 针 孑 模 型下 进 行 规 ( L
基于模板匹配算法的压电微位移器位移量原位测量技术
t m p a e m a c i l o ih e l t — t h ng a g r t m
Wa gD o ag Y n o gig L oY nj , i D n , h oY nmo n ad n , a gY nyn , u o g e Lu o g Z u o g i
( teKyLbrt yo dr O ta s u et i , h in nvrt, aghu30 2 ,C i ) Sa e aoa r Moen pi lnt m na o Z ea gU i sy H a zo 10 7 h a t o f c I r tn j ei n
Ab t a t:Th sp p rp e e t o e t o o n st ip a e n a u e n fP T c n e ,wh c s b s d sr c i a e r s n sa n v lmeh d fri — i ds lc me tme s r me to Z s a n r u ih i a e
王道 档 , 甬英 , 永 洁 ,刘 东,卓永模 杨 骆
( 浙江大学现代光学仪器国家重点实验室 摘 杭州 30 2 ) 10 7
要:针对压 电微位移器的位移量高精度测量需要 , 基于模板匹配算法提 出了一种新颖 的位移量原 位测量方法。利用改进
型的 T y nG en干涉系统对压 电微位移器 的电压——位移特性曲线进行原位测量 , w ma— r e 根据模板匹配算法实时计算干涉条纹的 移动量 , 进而得到对应的压 电微位移量 , 并对相关实验测量结果进行 了分析与验证 。结果表 明, 该测, 其测量精度和分辨率均可达到纳米量级。该方 法属于非接触式测量 , 具有较 高的可靠性 , 在 微位移 的高精度原位 自动测量 中具有较好 的实用性 。 关键词 : 微位移测量 ; 模板匹配 ; 泰曼——格林干涉系统 ;原位测量
基于柔性铰链的微位移设计
第一章绪论1.1 柔性铰链简介1.1.1 柔性铰链定义柔性铰链作为一种小体积、无机械摩擦、无间隙和运动灵敏度高的传动结构,被广泛应用于各种要求微小线位移或角位移、且高精度定位的场合。
开创了工作台进入毫米级的新时代。
柔性铰链有成千上万的应用,如:陀螺仪、加速度计、天平、控制导弹的喷嘴、控制器显示仪、记录仪、调整器、放大连杆、计算机、继电器和传动连杆。
60年代前后,由于宇航和航空等技术发展的需要,对实现小范围内偏转的支承,不仅提出了高分辨率的要求,而且对其尺寸和体积提出了微型化的要求。
人们在经过对各种类型的弹性支承实验探索后才逐步开发出体积小、无机械摩擦、无间隙的柔性铰链。
随后柔性铰链在支撑结构、联接结构、调整机构和测量仪器中的得到广泛应用,并获得了前所未有的高精度和稳定性,并日益成熟。
70年代末,美国国家标准局引入了柔性铰链机构以放大压电驱动器的位移,使其设计的工作台既具有亚纳米级的位移分辨率,又具有相对较大的行程。
近年来,柔性铰链以其特殊的性能在精密机械、精密测量、微米技术和纳米技术等领域得到广泛应用没,尤其是柔性铰链与压电致动结合实现超精密位移和定位。
柔性铰链用于绕轴作复杂的有限角位移,它的特点是:无机械摩擦、无间隙、运动灵敏度高。
柔性铰链有很多种结构,最普通的形式是绕一个轴弹性弯曲,这种弹性变形是可逆的。
1.1.2 柔性铰链运动的实现方法柔性铰链是通过弹性形变来实现铰链运动。
施加的弹性变形力会导致铰链中心点偏移其几何中心,从而影响柔性铰链的转动精度。
柔性铰链用于绕轴做复杂运动的有限角位移,它有很多种结构,最普通的形式是绕一个轴弹性弯曲,这种弹性变形是可逆的。
1.1.3 柔性铰链类型柔性铰链可分为单轴柔性铰链和双轴柔性铰链。
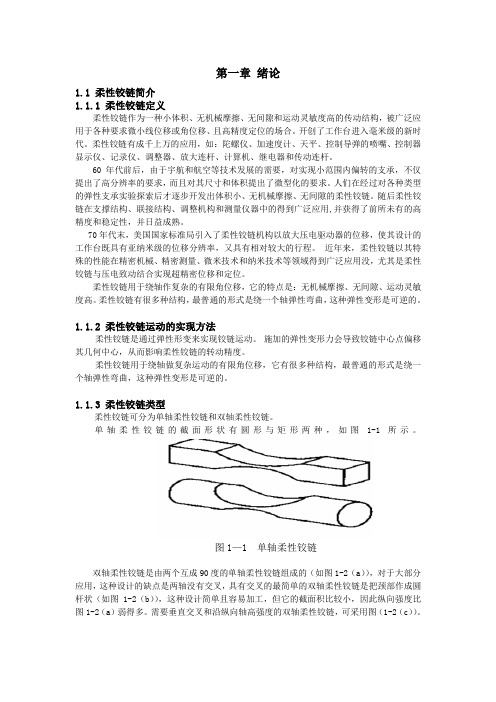
单轴柔性铰链的截面形状有圆形与矩形两种,如图1-1所示。
图1—1 单轴柔性铰链双轴柔性铰链是由两个互成90度的单轴柔性铰链组成的(如图1-2(a)),对于大部分应用,这种设计的缺点是两轴没有交叉,具有交叉的最简单的双轴柔性铰链是把颈部作成圆杆状(如图1-2(b)),这种设计简单且容易加工,但它的截面积比较小,因此纵向强度比图1-2(a)弱得多。
微小尺度位移的测量
xxxxxx 学士学位论文微小尺度位移的测量2013年5月30日独创声明本人郑重声明:所呈交的毕业论文(设计),是本人在指导老师的指导下,独立进行研究工作所取得的成果,成果不存在知识产权争议。
尽我所知,除文中已经注明引用的内容外,本论文(设计)不含任何其他个人或集体已经发表或撰写过的作品成果。
对本文的研究做出重要贡献的个人和集体均已在文中以明确方式标明。
此声明的法律后果由本人承担。
作者签名:二〇一年月日毕业论文(设计)使用授权声明本人完全了解鲁东大学关于收集、保存、使用毕业论文(设计)的规定。
本人愿意按照学校要求提交论文(设计)的印刷本和电子版,同意学校保存论文(设计)的印刷本和电子版,或采用影印、数字化或其它复制手段保存论文(设计);同意学校在不以营利为目的的前提下,建立目录检索与阅览服务系统,公布论文(设计)的部分或全部内容,允许他人依法合理使用。
(保密论文在解密后遵守此规定)论文作者(签名):二〇一年月日毕业论文结题报告毕业论文成绩评定表注:总成绩=指导教师评定成绩(30%)+评阅人评定成绩(20%)+答辩成绩(50%),将总成绩由百分制转换为五级制,填入本表相应位置。
目录1.引言 12.光学测量技术 2 2.1 电子散斑干涉技术 2 2.1.1电子散斑干涉技术简介 2 2.1.2散斑干涉测量原理 3 2.2 莫尔条纹测量原理 4 2.2.1莫尔条纹简介 4 2.2.2莫尔条纹技术的测量原理 4 2.3 光杠杆法 6 2.3.1光杠杆法简介 6 2.3.2光杠杆法的实验原理 62.3.3光杠杆的应用73 电学测量技术8 3.1 电感式位移测量8 3.1.1电感式传感器简介8 3.1.2电感式传感器的测量原理9 3.2 电容式位移测量10 3.2.1电容位移传感器简介103.2.2电容式位移测量测量104. 总结13 参考文献14 致谢14微小尺度位移的测量xxx(物理与光电工程学院xxxx xx级x班xxxxxx)摘要:微小位移测量技术可以实现实时,精度高,非接触,大范围的精确监控测量,因此它有着广泛的应用范围和应用前景。
电致伸缩微位移器在机床刀具微进给系统的应用
高, 微位 移技 术应用越来越广泛 。主要有 以下几 方面 : ( )精度补偿 1 效 率问题已经成为衡量设备 先进性 的重 要指标之一 , 因此 , 先进 的设 备 和仪器 中 的运 动 部件 , 向高 速
度 、 度发展 , 高精 以提高设 备 的工作 效率 。但 是 , 速度带 来 高
关键 词: 电致 伸缩 微位 移器效 率 ; 精度 ; 控制
中图分类号 :M1 T 2 文献标识码 : A 文章编号 :0 7— _1 (0 7 o 10 4 4 2 0 ) 4—05 o 4 0 3一 2
App i a i n l c r sr ci e mi r diplc m e ti he m ir — e d y t m f ma h n o lc to ofe e t o ti tv c o s a e n n t c o- f e s s e o c i e t ol
维普资讯
第2 0卷
第 4期
ቤተ መጻሕፍቲ ባይዱ机 械研 究 与应用
MECHANI CAL RES EARCH & APPLI CATI ON
Vo 0 No4 l2
20 0 7年 8月
2 7- 00 08
电致 伸 缩 微 位 移 器 在 机床 刀 具 微进 给 系统 的应 用
“ W e —qa i in。Ya gJ n —yn n u ig ( i su sakm ci o C . Ld inh i as 7 12 C i Ta h ip r ahn t l O , i ,T su nu 4 04,hn n e o a G a)
Ab t a t h e u r n fa c rc fp e iin ma h n r s mo e a d mo e h g ih t e d v lp n fe e to i e h sr c :T e r q i me to c u a y o r cso c i ey i r n r i h w t h e eo me to lc r n c tc -
微位移机构的现状及趋势
微位移机构的现状及趋势程颖【摘要】微位移机构是精密机械和精密仪器的关键部件之一。
介绍了一些典型的微位移机构的结构、原理、特点和应用, 并对这些机构进行了比较。
关键词: 微位移机构; 扭轮摩擦传动; 直线电机; 弹性变形; 柔性铰链; 压电陶瓷【 Abstract】The micro-motion mechanism is one of key components of precision machinery and precision instrument.Introducesstructure,principle,characteristics and applications of some typical the micro-motion mechanisms.The comparison among these mechanisms are carried out.Keywords: Micro- motion mechanism; Torsion wheel friction transmission; Linear motor ; Elastic deformation; Flexible hinge; Piezoelectric ceramic当前随着科学技术的迅速发展, 尤其是在微电子技术、宇航、材料、生物工程等学科的发展, 对精密机械和精密仪器的精度及灵敏度要求越来越高。
例如, 在材料学科中, 科学家们为了探测材料表面的原子结构, 甚至将其原子结构做重新排列, 对于相应的操作精度要求达到了亚纳米级。
[1]1 机械传动式微位移机构机械传动式微位移机构是一种最古老的机构, 在精密机械和仪器中应用很广, 其结构形式较多, 主要有螺旋机构、杠杆机构、契块凸轮机构以及它们的组合机构。
但因机构中存在机械间隙、摩擦磨损以及爬行现象等, 所以运动灵敏度和精度都很难达到高精度, 所以该机构只适宜于中等精度。
基于法布里-珀罗干涉仪的微位移测量方法研究
O 引 言
随着 纳 米科 技 的迅 速 发 展 和现 代 制 造技 术 水 平 的
珀干涉 仪实 际测量 分辨 力具 有重 大 的理 论 和现 实 意义 , 国 内外 有 很 多 研 究 者 致 力 于 这 一 方 向 的研 究 。L a w a l l 等 通过 对法 布里一 珀 罗腔 的相邻 模 进 行测 量 ,将 测 量 范 围扩展 至 2 5 mm 以上 ;Ha i t j e ma等 人 研 制 的法 布里 -
Re s e a r c h o n Me a s ur e me n t Me t h od o f Mi c r o . . d i s pl ac e me n t Ba s e d o n Fa br y. . Pe r o t I nt e r f e r o me t e r DUAN Xi ao y a n, REN Dong me i,ZH U Zhe ny u ,LI Hua f e ng, LAN Yi bi ng
珀罗频率追踪装置可在 3 0 0 m范围内对传感器进行纳
米 精度 校准 ;而 J o o等 人设 计 的折 叠 式 法 . 珀 干 涉 仪 则 实现 了测量 灵 敏 度 的提 高 J 。 在 国 内 , 中 国计 量科 学研 究 院从 1 9 9 0年 即联 合 清华大 学开 展频 率追踪 法. 珀 干涉仪 位移 测 量研 究 L 5 j , ‘ 并 进 行 了 一 系列 改 进 和 非 线 性 误差 分 析 J ,在 0 . 2 3 0 9 m 的测 量 范 围 内实 现 了 亚 纳米 级测 量 分 辨 力 ,并 通 过 换模 锁 定 将 测 量 范 围扩 展到 1 . 7 m。本 文对基 于法布里 - 珀罗 干涉仪 的微位 移 测 量方 法进 行 了理 论 分 析 ,设 计 构 建 了一 套 基 于 法 布
微小位移测量技术探究
微小位移测量技术探究盖巍奇【摘要】随着现代科技的发展,在精密加工、自动控制、半导体制作工艺中经常要对微小位移进行测量和控制.本文提出采用光学和莫尔条纹电子学细分技术为基础的一种测量微小位移的方法,并研制了微小位移传感器.该传感器体积小,实现简单,测量精度可达微米级,理论测量分辨率可达:0.078μm.为验证该方法的有效性和准确性,设计了用步进电机带动微距丝杠的滑动平台和计算机控制软件控制系统.由计算机控制系统发送命令,控制滑动平台移动微小距离作为理论位移数据,由微小位移传感器测量滑台移动距离作为实验数据,经对比分析,该微距传感器测量精度可达10μm.【期刊名称】《黑龙江科学》【年(卷),期】2018(009)009【总页数】3页(P162-164)【关键词】微距测量;莫尔条纹;电子学细分;光栅【作者】盖巍奇【作者单位】东北师范大学附属中学,长春130021【正文语种】中文【中图分类】TH822微小位移的测量可以应用在很多领域。
无论是测量长度、高度、厚度、间距或直线位移,还是在精度检测、设备标定、精密加工、半导体制作设备、武器系统等方面,都能够看到微小位移测量技术的应用。
现代科技的发展推动工业技术不断的进步,工业4.0的提出,对自动控制、精密加工以及需要微小位移测量领域提出了更高的要求。
目前微小位移的测量技术大体可分为三类:一是显微镜结合CCD图像处理方式的测量技术,向被测物体发射45°角的激光,由CCD接收反射光,通过人工观测反射光点照射在CCD光电阵列中的位置来判读物体移动的距离。
二是通过光学方法,根据光学干涉原理,通过测量干涉条纹移动的数量测量位移,如迈克尔逊激光干涉仪测量。
另外,光栅尺也是根据光学方式测量位移的专门测量装置,但由于体积较大,光栅刻线较粗,测量精度低,只适合测量要求不高的应用环境。
三是利用霍尔效应的电子学测量方法。
根据霍尔元件的磁电阻效应与磁感应强度的平方成正比这一关系,通过改变磁铁与霍尔元件之间的距离引起霍尔元件磁电阻的变化,再把这一变化转换成电压信号,测量电压信号从而得到与之对应的位移量。
微位移驱动器的控制模型及仿真技术研究
ap n ao al ajs r pe dar snb dut . e e o Ke o d : at antsit e m c -i l e e t c a r antm m c iecul g s uao yw r sg n geotcv : ir ds a m n t t ;m ge s - ahn o pi ; i lt n i m r i o pc au o i n m i
维普资讯
20 0 7年 第 ( r sue n coytm T cnlg s Ta d cr dMi ss eh o i ) n a r e oe
9 3
{ ) 前沿技术 l I
、
微 位 移 驱 动 器 的控 制模 型 及 仿 真 技 术研 究
宋仁 旺 ,陈琳 英
( 兰州物理研究所 。 甘肃 兰 州 70 0 ) 3 00
摘 要 :介绍 了超磁致伸缩驱动器 ( M ) G A 的结构 、 工作原理 、 特性方程 以及 超磁致伸缩效 应模 型 , 从有助 于理解压磁效应 的角度 , 建立了 G A的静态位 移~ M 力模 型和磁一 机耦合模型 。 并对后者进行了仿 真研究 , 仿
e c e ig q a tt a d ic e sn n ua in I i mp r n o a l r t y a c c a a trs c o h y t m t x e d n u n i n n r a i g u d lt . t si o a t me i a e d n mi h r ce it fte s s o y o t t o i e
0 引 言
量 的磁 畴 。 各个磁畴的 自发磁化方 向不相 同, 在没有加 外磁 场 时, 自发磁化引起的形变互相抵消 。外加磁场后 , 个磁 各 畴 的 自发磁化都转 向外施磁 场方 向, 于是 产生 了宏观磁 致
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
微位移技术第一章概论第二章微位移机构第三章柔性铰链第一章概论作为精密机械与精密仪器的关键技术之一一微位移技术,近年来随着微电子技术、宇航、生物工程等学科的发展而迅速的发展起来。
例如用金刚石车刀直接车削大型天文望远镜的抛物面反射镜时,要求加工出几何精度高于l/l0光波波长的表面,即几何形状误差小于0.5u m。
计算机外围设备中大容量磁鼓和磁盘的制造,为保证磁头与磁盘在工作过程中维持1um内的浮动气隙,就必须严格控制磁盘或磁鼓在高速回转下的跳动。
特别是到20世纪70年代后期,微电子技术向大规模集成电路和超大规模集成电路方向发展,随着集成度的提高,线条越来越微细化。
256K动态RAM线宽已缩小到1.25um左右,目前己小于0.1um,对与之相应的工艺设备(如图形发生器、分步重复照相机、光刻机、电子束和X射线曝光机及其检测设备等)提出了更高的要求,要求这些设备的定位精度为线宽的1/3~1/5,即亚微米甚至纳米级的精度。
生物工程是当今一门崭新的学科,现代科学的发展要求,随意捕捉和释放单一游离细胞,或向细胞内注入和拾取某一成份,同时还能测定和记录细胞生物的电参数,因此研制满足这一要求的设备同样离不开微位移技术。
随着机器人技术的发展,机器人精微操作已成为机器人研究领域中的重要课题之一,如用机器人完成精密伺服阀,压电陀螺等精密零部件的装配作业,其技术关键之一是微位移技术的研究.[1]因此,微位移技术是现代工业基础的重要组成部分,它几乎左右着上述各领域的发展,并引起国内外研究人员的极大关注,他们加紧了这方面的研究,并取得了很大进展。
由于定位技术的水平几乎影响着整个设备的性能,因此直接影响到微电子、宇航、生物工程等高科技技术的发展。
例如精密仪器,无论是大行程的精密定位,还是小范围内的光学对准,都离不开微位移技术。
因此微位移技术,成为现代精密仪器工业的共同基础。
1.1国内外现状及发展趋势美国LLN以美国知名核聚变实验室)研制的加工大口径光学元件的金刚石车床(LODTM)是目前世界上能进行最高精度切削加工的车床,其所用的快速刀具伺服机构采用了PZT(错钦酸铅压电陶瓷),能在士1.27um范围内分辨力达到2.5nm,频率响应可达到IOOHz;日本日立制作所采用柔性支承导轨、压电晶体驱动方式的微位移机构的位移精度为士0.05um,行程为士8um,该机构已成功应用于电子束曝光机;中国国防科技大学采用柔性支承导轨、电致伸缩驱动方式的微位移机构的分辨力为0.01um,行程为20um[4]。
现将收集的具体资料列于下表1-11.2系统研制的意义微位移技术是超精密加工及检测中的一项关键技术。
特别是纳米技术的飞速发展,使微位移的精度要求由微米级而上升到纳米级。
随着扫描隧道显微镜(STM)及原子力显微镜(AFM)的广泛应用,更加需要有高精度,高分辨率,能够灵活控制的微动系统,以实现纳米级的加工及检测精度。
微位移技术也推动了微电子技术、宇航、生物工程等学科的迅速发展。
例如精密仪器,无论是大行程的精密定位,还是小范围内的光学对准,都离不开微位移技术。
因此微位移技术,己经成为现代精密仪器工业的共同基础,是衡量一个国家科技水平的重要标志,代表了一个国家加工技术水平的高低。
发展微位移技术,是非常重要的。
1.3微位移系统工作原理[2]压电陶瓷PZT存在着迟滞、蠕变和非线性等缺点,在要求实现高分辨率微量位移的场合,必须建立闭环控制系统把与输出位移对应的电压值反馈回来,控制加在压电陶瓷上的电压,不断地修正各种干扰造成的机构位移偏差,以实现给定的位移.控制原理框图如图1所示。
机构的位移量由传感器测量,测量信号一路送给计算机,另一路与计算机发出的指令信号进行比较,经比较放大后再把信号加到PZT 上,实现精密定位和微量位移.第二章微位移机构微位移技术包括:微位移机构、检测装置和控制系统3大部分。
微位移机构是指行程小(小于毫米级),精度高(亚微米、纳米级)及灵敏度高的机构,它是微位移技术中的关键部件之一,也是一种机、电、磁一体化的组合件。
它既可作为微进给和微调节部件,也可作为工艺系统动、静误差补偿的关键部件。
现在,微位移机构已能达到0.005-0.01um的分辨率。
微位移机构由微位移驱动器和微动工作台组成。
根据微位移驱动器和微动工作台导轨形式可分为5类:a)柔性支承,压电晶体或电致伸缩微位移器驱动。
b)滚动导轨,压电晶体或电致伸缩微位移器驱动。
c)平行弹性导轨,电磁、压电或机械式驱动。
d)滑动导轨,机械式或压电式驱动。
e)气浮导轨,伺服电机和直线电机驱动。
本文将介绍一些典型的微位移机构的结构原理、特点及应用,并对它们作一些比较分析。
1直线电机式微位移机构直线电机具有任意的调节行程,无限的位移分辨率的优点。
在利用空气轴承微步进直线电机作为驱动件产生微位移时,由于简化了系统的结构,从而避免了由于中间环节的弹性变形、间隙、磨损和发热等因素带来的运动误差,故这种微位移机构最明显的优点是响应快、可达到瞬时高加速度和减速度。
为此,它的快速进给速度达到以上,几乎在瞬间可加速到几个重力加速度。
在高加速度时,通常可产生几个牛顿推力。
在常载下可达到1um以内的重复定位精度。
另使用直线电机的伺服系统具有较大的刚度和较小的外形尺寸,在计算机控制的精密车削和磨削加工中得到成功的应用。
但是,直线电机目前还存在着成本较高、发热较严重、控制系统较复杂等问题,故应用还受到一定限制。
但是,随着科学技术的发展,直线电机的上述问题将得到解决,直线电机式微位移机构将会得到广泛的应用。
2机械传动式微位移机构机械传动式微位移机构是一种最早出现的机构,在精密机械和仪器中应用甚广,比较成熟,其结构形式较多,主要有螺旋机构、杠杆机构、楔块凸轮机构、弹性机构以及它们的组合机构。
机械传动式微位移机构的特点:(i)具有较好的分辨率;(2)行程较大;(3)存在机械间隙、摩擦磨损以及爬行等缺点,所以运动灵敏度和运动精度都难以达到高精度,故仅适应于中等精度。
2.1螺旋式和差动螺旋式微位移机构1.螺旋式微位移机构螺旋式微位移机构具有较高的分辨率,可以获得大行程的位移,结构简单,制造维修方便,它是利用螺旋传动原理来获得微小直线位移。
图1是螺旋式微位移机构的简图。
转动手轮1经螺杆将螺旋运动转换为直线位移运动。
位移S与手轮转角切之间的关系为:其微动灵敏度为:式中,t—螺距;Ψ——手轮转角因此,若螺杆螺距t已定,在螺杆与螺母配伍和传动平稳时,精确控制ψ的大小,就可得到微位移,一般精度可达到10μm。
它广泛应用于测量机构及微调机构,如千分尺和精密工作台的传动机构等。
2.差动螺旋式微位移机构为了得到更高精度的微位移,可采用如图2所示的差动螺旋式微位移机构。
它的螺杆1有两段螺距,分别为t1和t2的螺纹,t2>t1,,且螺旋方向相同,则螺母2的微位移S为: 。
式中,ψ为手轮转角。
若t2和t1,分别为0.75mm和0.7mm,其差值0.05mm,手轮T 的圆周刻度分划为50格,则手轮转动时,运动件3的位移量可小至1μm。
差动螺旋式微位移机构除此之外还有采用差动螺母的形式,其工作原理相似,结构相对紧凑,但是差动螺母的加工精度较难保证。
2.2组合式机械传动式微位移机构1.凸轮式微位移机构它是利用凸轮曲线的微小变化来实现运动件的微位移,其传动链短、刚性好、结构简单。
2.螺旋—斜面组合式微位移机构它由螺旋机构和斜块机构两部分组成,如图3所示。
旋转螺杆1,从动螺母2推动推杆3向前移动,并推动斜块5移动,从而使滑块6产生微动,其位移量为:式中: —螺杆的螺距;—螺杆转角;—斜块斜面与水平面的倾角,一般取=1/50。
3.蜗轮一凸轮组合式微位移机构如图4所示,它由蜗轮蜗杆副1及凸轮4组成,主动件蜗杆1转动,经过蜗杆蜗轮副减速,带动凸轮转动,通过滚轮5使滑板6得到微位移。
4.齿轮一杠杆组合式微位移机构如图5所示,手轮轴1转动,经过三级齿轮副减速后,变成扇形齿轮2的微小转角,2是一个杠杆机构,转换成运动件5的微位移。
此外,还有摩擦一齿轮组合式微位移机构(可以获得很高的微动灵敏度0.1μm)和螺旋一锥轮组合式微位移机构等等。
这些组合式微位移机构相对复杂些,一般应用于特定场合。
3扭轮摩擦传动式微位移机构它是利用扭轮摩擦传动来实现微位移的机构。
一般的摩擦传动方式,是将驱动摩擦轮展开为直线运动,运动分辨率有限。
当将摩擦副的主动轮l(见图6)与从动杆2的母线交角从直角减小到一很小角度时,此时形成的摩擦副即为扭轮摩擦副,而所形成的机构也就称为扭轮摩擦传动式机构。
它可以得到很小的导程和纳米级的运动分辨率和定位精度,且有运动平稳、无间隙和无爬行等优点。
它可应用于许多超精密传动领域。
4弹性变形传动式微位移机构这种机构是利用两个弹簧的刚度比而缩小输人位移的机构,见图7。
假设两个弹簧A B的刚度分别为K A K B,输人位移为X i,则输出位移为x如果KA >> KB ,则工作台位移x 相对输人位移X i 就被大大缩小,例如K A : K B =99:1,缩小比为1/100。
如输人位移X i =10μm ,则输出位移x=0.1μm 。
这种机构结构简单,可获得较多的分辨率;定位精度较低。
由于输人位移是步进状的,故易产生过渡性振荡,不适于要求动态响应的场合。
可用于高精度测量技术及光学零件的精密调整机构等。
5压电元件式微位移机构本机构利用压电元件(陶瓷)的逆压电效应来实现微位移,如图8所示。
改变输人电压的大小即可得到不同的微位移,避免了机械结构造成的误差,故具有结构简单、尺寸小、分辨率极高(可达纳米级)、发热少、无杂散电磁场、便于遥控、能实现自动微量进给、有较好的动特性和有很高的响应频率(响应时间达100μs)等优点。
为了解决压电元件装置的移动范围较窄的最大缺点,美国BI公司研制成了由3个压电元件组成的尺镬式移动机构,图9表示机构的移动原理。
它可在25mm移动范围内,同时获得最小定位分辨率为0.02μm,移动速度为0.01一0.5m/s的性能。
它已成功应用于高科技领域,如机器人微位移定位器、磁头、喷墨打印和光跟踪系统以及压电式刀具补偿机构(可用于切削加工非轴对称特殊型面时刀具微进给的控制)等等。
6热变形式微位移机构本机构的微动原理见图10所示,传动杆1的一端固定在机架上,另一端固定在沿导轨作微位移的零件2上。
当线圈3通电后,产生热量,使传动杆受热伸长,其伸长量△L为式中: 一传动杆材料的线膨胀系数;L一传动杆的长度;t 1 t 0一被加热达到的温度和加热前的温度。
例如,钢的线膨胀系数为12×106,当长度为50mm的钢棒,从20℃加热到60℃时,可获得从0一24μm的位移量。
为了减小位移的相对误差,应选择线膨胀系数和弹性模量较高的材料制成传动杆。