双高斯拟合的风廓线雷达降水时的风场反演_何越
星载雷达降水反演算法敏感性分析

星载雷达降水反演算法敏感性分析*吴 琼 尹红刚 陈 林 商 建 谷松岩 卢乃锰WU Qiong YIN Honggang CHEN Lin SHANG Jian GU Songyan LU Naimeng许健民气象卫星创新中心,中国气象局中国遥感卫星辐射测量和定标重点开放实验室/国家卫星气象中心(国家空间天气监测预警中心),北京,100081Innovation Center for FengYun Meteorological Satellite (FYSIC ),Key Laboratory of Radiometric Calibration and Validation for Environmental Satellites ,National Satellite Meteorological Centre (National Space Weather Monitoring and Early Warning Centre ),China Meteorological Administration ,Beijing 100081,China 2023-08-22收稿,2023-12-26改回.吴琼,尹红刚,陈林,商建,谷松岩,卢乃锰. 2024. 星载雷达降水反演算法敏感性分析. 气象学报,82(2):236-246Wu Qiong , Yin Honggang , Chen Lin , Shang Jian , Gu Songyan , Lu Naimeng. 2024. Spaceborne radar-based precipitation retrieval:Sensitivity analysis. Acta Meteorologica Sinica , 82(2):236-246R D m R D m R D m R D m Abstract The accuracy of the FY-3G PMR prototype algorithm is evaluated using the data of GPM KuPR . Based on the result, the sensitivity of precipitation rate retrieval to initial relation of -, phase, and the correction factor paramNUBF for NUBF is analyzed . Firstly, the - relation of stratiform and convection are adjusted and the DSD profiles, radar reflectivity factor profiles,and precipitation rate profiles are compared . Secondly, sensitivity experiments are conducted to analyze the impact of phase misjudgment on the accuracy of precipitation rate retrieval . Finally, the sensitivity of paramNUBF to precipitation rate retrieval is evaluated by setting different paramNUBF . The results indicate that the FY-3G PMR prototype algorithm is well consistent with GPM KuPR in the retrieval of precipitation structure and intensity distribution, and the relative error is less than 10% while the correlation coefficient is greater than 0.95. The retrievals of radar reflectivity factor profiles and precipitation rate profiles are not sensitive to -, but the retrieved DSD profiles are relatively more sensitive to -. Misjudgment of phase in the bright band layer, especially between mixed phase state and solid or between mixed phase state and liquid state, affects precipitation rate retrieval near the 0 degree layer but has little impact on ground precipitation rate retrieval . ParamNUBF is a highly sensitive factor, and the greater the difference from the true value, the greater the error of the precipitation rate profile . The sensitivity analysis on spaceborne radar precipitation rate retrieval algorithms can not only deepen our understanding of precipitation rate retrieval theories and methods and improve the accuracy of precipitation rate retrieval, but also provide design ideas for the upcoming field experiments of FY-3G PMR .Key words GPM , FY-3G PMR , Precipitation rate retrieval , Phase , NUBF , Sensitivity analysisR D m )R D m 摘 要 以全球降水测量卫星(GPM )KuPR 的实测资料作为代理数据,评估了风云三号G 星降水测量雷达(FY-3G PMR )原型算法的精度。
【CN109814131A】一种基于激光雷达风速数据的湍流参数反演方法【专利】
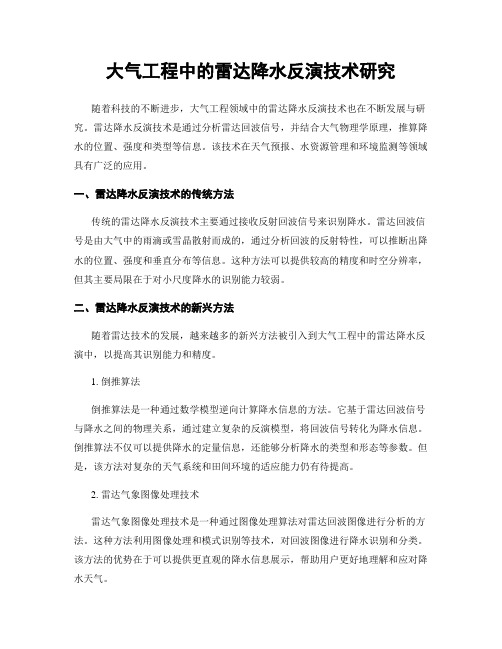
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910129881.X(22)申请日 2019.02.21(71)申请人 中国科学技术大学地址 230026 安徽省合肥市包河区金寨路96号(72)发明人 王璐 夏海云 王冲 吴云斌 魏天问 (74)专利代理机构 北京凯特来知识产权代理有限公司 11260代理人 郑立明 郑哲(51)Int.Cl.G01S 17/95(2006.01)(54)发明名称一种基于激光雷达风速数据的湍流参数反演方法(57)摘要本发明公开了一种基于激光雷达风速数据的湍流参数反演方法,包括:控制激光雷达采用非连续圆锥扫描方式获得径向风速;利用径向风速以及非连续圆锥扫描时的相关角度参数来计算计算径向风速脉动量;利用径向风速脉动量计算实测方位角速度结构函数,并结合Kolmogorov 模型中的理论横向速度结构函数,来计算耗散率;由径向风速和耗散率计算其他湍流参数。
上述方法通过非连续圆锥扫描方式减小径向风速的测速误差,采用Kolmogorov模型并将速度结构函数作差消除噪声项后再计算耗散率,除了通过上述方式降低了湍流参数的测量误差,还可以测量除耗散率之外的能量、积分尺度、动量通量以及大气边界层高度。
权利要求书2页 说明书6页 附图1页CN 109814131 A 2019.05.28C N 109814131A1.一种基于激光雷达风速数据的湍流参数反演方法,其特征在于,包括:控制激光雷达采用非连续圆锥扫描方式获得径向风速;利用径向风速以及非连续圆锥扫描时的相关角度参数来计算径向风速脉动量;利用径向风速脉动量计算实测方位角速度结构函数,并结合Kolmogorov模型中的理论横向速度结构函数,来计算耗散率;由径向风速和耗散率计算其他湍流参数。
2.根据权利要求1所述的一种基于激光雷达风速数据的湍流参数反演方法,其特征在于,所述非连续圆锥扫描方式包括:激光雷达以固定天顶角α发射激光束,围绕垂直轴扫描360°方位角范围,在测量其中一个方位角对应的径向风速时,暂停扫描,保持方位角不变,直至测速结束,再继续扫描至下一个方位角。
多普勒激光雷达风场反演研究进展

第51卷 第1期 激光与红外Vol.51,No.1 2021年1月 LASER & INFRAREDJanuary,2021 文章编号:1001 5078(2021)01 0003 06·综述与评论·多普勒激光雷达风场反演研究进展左金辉,贾豫东(北京信息科技大学仪器科学与光电工程学院,北京100192)摘 要:多普勒激光雷达因高精度测量、高空分辨率等特点对晴空天气的风场探测具有重要应用价值,但多普勒激光雷达只能获取径向风速,必需进行风场反演。
介绍了单部和多部多普勒激光雷达的风场反演技术的国内外进展及优缺点,其风场反演算法主要在微波雷达的基础上进行优化和创新。
结果表明,单部多普勒激光雷达中变分方法是最有前途的方法;早期多部雷达普遍存在同一性的问题,对多部多普勒激光雷达也没有提出更有效的方法,变分方法的提出使得单部雷达和多部雷达不再有根本的区别,同化方法成为今后的研究重点(典型方法是变分同化)。
关键词:多普勒激光雷达;风场反演;变分同化中图分类号:TN958.98 文献标识码:A DOI:10.3969/j.issn.1001 5078.2021.01.001ResearchprogressinwindfieldinversionofDopplerlidarZUOJin hui,JIAYu dong(InstituteofInstrumentScienceandPhotoelectricEngineering,BeijingInformationScience&TechnologyUniversity,Beijing100192,China)Abstract:Dopplerlidarhasimportantapplicationvaluefordetectingwindfieldinclearskybecauseofitshighpreci sionmeasurementandhighresolution.However,Dopplerlidarcanonlyobtainradialwindspeed,soitisnecessarytocarryoutwindfieldinversion.Thispaperintroducesthedevelopment,advantagesanddisadvantagesofwindfieldin versiontechnologyofsingleDopplerlidarandmulti Dopplerlidarathomeandabroad.Theresultsshowthatthevaria tionalmethodisthemostpromisingmethodinthesingleDopplerlidarandmanyradarshadthesameproblemintheearlystage,therewasnomoreeffectivemethodforthemulti Dopplerlidar,withtheintroductionofvariationalmethod,thereisnofundamentaldifferencebetweensingleradarandmulti radar,andtheassimilationmethodbecomesthefo cusoffutureresearch(thetypicalmethodisvariationalassimilation).Keywords:Dopplerlidar;windfieldinversion;variationalassimilation基金项目:中国科学院战略性先导科技专项(A类)(No.XDA17010401)资助。
风廓线雷达反演大气比湿廓线的初步试验
风廓线雷达反演大气比湿廓线的初步试验孙康远;阮征;魏鸣;葛润生;董保举【摘要】基于湍流散射理论,运用边界层风廓线雷达(WPR)联合RASS(Radio Acoustic Sounding System),GPS/PWV (Global Position System/Precipitable Water Vapor)进行全遥感系统的大气比湿廓线反演试验,并对影响因子进行分析.利用2011年8-9月云南大理综合探测试验数据的反演结果与探空数据进行比较分析,结果表明:WPR联合探空的温度廓线和起始边界比湿(q0)反演大气比湿廓线,与探空大气比湿廓线相比具有相同的变化趋势,标准差为0.84 g· kg-1,误差随高度增加呈递增趋势;WPR联合RASS,GPS/PWV数据反演大气比湿廓线,与探空大气比湿廓线的标准差为0.85 g· kg-1.参加反演的数据中,折射指数结构常数C2n与谱宽σturb2对反演影响最大,反演算法中大气折射指数梯度M符号的判断对反演精度也有较大影响.【期刊名称】《应用气象学报》【年(卷),期】2013(024)004【总页数】9页(P407-415)【关键词】风廓线雷达;大气比湿廓线;大气折射指数梯度;折射指数结构常数【作者】孙康远;阮征;魏鸣;葛润生;董保举【作者单位】南京信息工程大学,南京210044;中国气象科学研究院灾害天气国家重点实验室,北京100081;中国气象科学研究院灾害天气国家重点实验室,北京100081;南京信息工程大学,南京210044;中国气象科学研究院灾害天气国家重点实验室,北京100081;云南省大理国家气候观象台,大理671003【正文语种】中文基于湍流散射理论,运用边界层风廓线雷达(WPR)联合RASS(Radio Acoustic Sounding System),GPS/PWV(Global PositionSystem/Precipitable Water Vapor)进行全遥感系统的大气比湿廓线反演试验,并对影响因子进行分析。
多普勒天气雷达风场退模糊方法的研究
多普勒天气雷达风场退模糊方法的研究
梁海河;张沛源;葛润生
【期刊名称】《应用气象学报》
【年(卷),期】2002(013)005
【摘要】文章提出了对多普勒天气雷达的风场信息进行预处理的"K-邻域频数法",该方法物理统计意义比较明确,能够有效地处理风场信息中的"噪声"问题.在此基础上,设计了单径向的速度扩展算法,并提出了"双径向-双切向"的方法,其效果与美国WSR-88D、NSSL和FSL的算法相当.该文还设计了一个界面十分友好的人机交互方法,可以达到约90%以上的速度扩展正确率,是对传统的人机交互方法的极大改进.【总页数】9页(P591-599)
【作者】梁海河;张沛源;葛润生
【作者单位】中国气象科学研究院,北京,100081;中国气象科学研究院,北
京,100081;中国气象科学研究院,北京,100081
【正文语种】中文
【中图分类】P4
【相关文献】
1.双多普勒天气雷达风场探测的可靠性研究 [J], 张沛源;周海光;胡绍萍
2.双多普勒天气雷达反演大气三维风场的个例研究 [J], 古金霞;顾松山;陈钟荣;裴宇杰
3.用双多普勒天气雷达资料研究暴雨三维风场结构 [J], 周海光
4.三部多普勒天气雷达联合测量大气风场的误差分布及最佳布局研究 [J], 张沛源;
何平
5.单多普勒天气雷达的中尺度风场探测技术研究 [J], 王峰云;王燕雄;陶祖钰
因版权原因,仅展示原文概要,查看原文内容请购买。
风廓线雷达资料反演雨滴谱和水汽通量的研究

通量处在不断变化之 中, 但在雨后 , 表现为水汽 向上输送。
关键 词 雨滴谱 反 演 ;水 汽通量 反 演 ;风廓 线雷 达 ;M. P指数 拟合
分 类 号 :P 4 1 2 . 2 5 d o i : 1 0 . 3 9 6 9 / 2 0 1 4 j ms . 0 0 4 4 文献标 识码 : A
期 和 即将停 止 时 的浓度参 数 n 。 和尺 度 参 数 A随 高度 的变 化 。 同 时利用 该 雷达 反 演 了这 次 降水 过
程 的 回波 强度 、 折 射 率 结 构 常数 和 信 结 果 显 示 :
( 1 ) n o 和 A随着降水的发展而发生变化, n 。 在降水达到最强之前达到最大值, A在 降水最强时出现
风 廓 线 雷 达 资 料 反 演 雨 滴 谱 和 水 汽 通 量 的研 究
黄 兴友 何 雨芩 ’ 刘 俊
( 1南京信息工程大学 中国气象局气溶胶 一 云一 降水重点开放实验室 , 南京 2 1 0 0 4 4;2云南省气候 中心 , 昆明 6 5 0 0 3 2 )
摘 要 对 2 0 1 0年 7月 2 0 日南京浦 I = t 地 区发 生 的一次 强 降水 过 程 , 用 WP 一 3 0 0 0风廓 线 雷达 反 演 了其 雨滴 谱分 布和 垂 直水 汽通 量 。并对 雨 滴谱进 行 了 M. P指 数 拟合 , 求得 了降水 前 期 、 中期 、 后
r a d a r d a t a . J o u r n l a o f t h e Me t e o r o l o g i c a l S c i e n c e s , 2 0 1 5 , 3 5 ( 6 ) : 7 5 1 — 7 5 9 . d o i : 1 0 . 3 9 6 9 / 2 0 1 4 j m s . 0 0 4 4
大气工程中的雷达降水反演技术研究
大气工程中的雷达降水反演技术研究随着科技的不断进步,大气工程领域中的雷达降水反演技术也在不断发展与研究。
雷达降水反演技术是通过分析雷达回波信号,并结合大气物理学原理,推算降水的位置、强度和类型等信息。
该技术在天气预报、水资源管理和环境监测等领域具有广泛的应用。
一、雷达降水反演技术的传统方法传统的雷达降水反演技术主要通过接收反射回波信号来识别降水。
雷达回波信号是由大气中的雨滴或雪晶散射而成的,通过分析回波的反射特性,可以推断出降水的位置、强度和垂直分布等信息。
这种方法可以提供较高的精度和时空分辨率,但其主要局限在于对小尺度降水的识别能力较弱。
二、雷达降水反演技术的新兴方法随着雷达技术的发展,越来越多的新兴方法被引入到大气工程中的雷达降水反演中,以提高其识别能力和精度。
1. 倒推算法倒推算法是一种通过数学模型逆向计算降水信息的方法。
它基于雷达回波信号与降水之间的物理关系,通过建立复杂的反演模型,将回波信号转化为降水信息。
倒推算法不仅可以提供降水的定量信息,还能够分析降水的类型和形态等参数。
但是,该方法对复杂的天气系统和田间环境的适应能力仍有待提高。
2. 雷达气象图像处理技术雷达气象图像处理技术是一种通过图像处理算法对雷达回波图像进行分析的方法。
这种方法利用图像处理和模式识别等技术,对回波图像进行降水识别和分类。
该方法的优势在于可以提供更直观的降水信息展示,帮助用户更好地理解和应对降水天气。
三、雷达降水反演技术的应用前景雷达降水反演技术在天气预报、水资源管理和环境监测等领域具有广泛的应用前景。
1. 天气预报雷达降水反演技术是天气预报的重要工具之一。
通过获取实时的降水信息,能够更准确地预测短期的天气变化。
这对于交通安全、农业生产等社会经济活动具有重要的意义。
2. 水资源管理雷达降水反演技术可以提供区域降水数据,并结合模型和统计分析方法,对水资源进行评估和预测。
这对于水库的调度、水灾风险评估等有重要作用,能够有效提高水资源管理的水平和效率。
双高斯拟合的风廓线雷达降水时的风场反演_何越
v =
v i S( v i ) Δv i ∑ i =0
M -1
v 和 w 三个分量, 以将风速分解为 u 、 规定垂直风向 上为正。在气象上, 常将风速分解成为水平风和垂 。 水平风方向记为 α H , 直风 水平风大小记为 V H , 规定水平风的来向为水平风的风向, 用 φ 表示方位 角, 取正北方向 φ = 0 , 水平风的方向 α H = φ + π 。 风廓线雷达测得的径向速度用 V r 表示, 规定径向速 度远离雷达方向为正, 朝向雷达方向为负。 径向速 、 φ) , 其中 度是距离 方位和天顶角的函数, 即 V r ( θ, θ 是波束的天顶角。由图( 2 ) , 根据几何关系可以推 v 分量的关系为 出水平风 V H 和 u 、 V H ( φ) = usinφ + vcosφ
3
实例分析
Fig. 3
图 3 径向速度几何表示 Geometric representation of the radial velocity
妨取两个倾斜波束分别指向正北和正东, 倾斜波束 的天顶角是状态量, 以 θ 表示。 假定 V rx ,V ry 和 V rz 分别表示天顶、 正东和正北三个波束方向的径向速 度的观测值。根据式( 6 ) 有 u = V rx - V rz cosθ sinθ (7) V ry - V rz cosθ v = sinθ w = V rz v 先由式( 7 ) 通过径向速度的测量值计算出 u 、 分量, 再代入式( 5 ) 计算出水平风, 垂直风由垂直波 束直接测量得到。 三波束计算方法简单, 但由于湍流回波信号弱 雷达探测容易受到各种干扰的影响使得其中一个或 多个波束指向的测量数据受到污染可能导致计算结 果出现异常直接影响风的计算质量 。 2. 2 五波束计算水平风 在采用五波束时, 同样的一个波束指向天顶, 用 于测量垂直速度;四个倾斜波束在方位上均匀分布, 天顶角是状态量, 均为 θ , 其径向速度可以表示为 V r ( θ, φ i ) = usinθsinφ i + vsinθcosφ i + w cosθ
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
αH = π + φ 根据几何关系可以推出径向速度 V r ( θ, φ) 由图( 3 ) , u , v w 与风速 和 三分量的关系为 V r ( θ, φ) = usinθsinφ + vsinθcosφ + w cosθ ( 6 )
{
φ = arctan
u v
(5)
2
水平风的合成
由径向速度求解水平风, 需要对水平风场的分 另一 布做一定的假设。 一种是水平风均匀的假设, 种是线性风场的假设。 均匀风场的假设限制较强, 在中、 高层大气中, 这种假设是合适的, 但是在边界 [1 ] , , 层下部 特别是在湍流较强时 存在一定的差异 。 通过双高斯拟合区分开降水谱和湍流谱, 从而去除 降水对水平风的影响, 因此, 可以默认为在降水条件 下, 风廓线雷达探测区域内水平风分布均匀 。 在均匀风场的假设条件下, 在直角坐标系中, 可
(4)
S( v i ) Δv i ∑ i =0 式( 4 ) 中 Δv i 为单位速度间隔。 对拟合得到的大气湍流谱 由式( 2 ) 和式 ( 4 ) , s t ( v) 进行一阶矩, 求算出实际大气的运动速度, 消 除大气垂直运动对雨滴功率谱的影响, 得到静止空 气中降水粒子的雨滴功率谱, 在图上表现为谱线位 双高斯拟合使得双峰分 置的偏移, 偏移的距离为 v , 离过程如图( 1 ) 所示。
第 14 卷 第 23 期 2014 年 8 月 1671 — 1815 ( 2014 ) 23-0146-07
科
学
技
术
与
工
程
Science Technology and Engineering
Vol. 14 No. 23 Aug. 2014 2014 Sci. Tech. Engrg.
双高斯拟合的风廓线雷达降水时的风场反演
{
φi =
iπ ;i = 0 , 1, 2, 3 2 (8)
可以先将两个相反波束的倾斜波束的径向速度 如西波束和东波束, 北波束和南波束。 进行平均, - 1 3π π -V V r θ, V rx = r θ, 2 2 2 (9) - 1[ V ry = 0 ) - V r ( θ, V r ( θ, π) ] 2
2
[Hale Waihona Puke ]Fig. 1图 1 双峰分离及处理 The separation and treatment of doublepeaks
降水粒子返回信号功率谱数据可以表示为 2 ( x - b2 ) / c2] } (3) s r ( w ) = a2 exp{ - [ , b a 式中 1 是气流谱波峰的高度 1 是气流谱波峰的位 c1 是气流谱波峰谱宽的一半; a2 是降水谱波峰的 置, b2 是降水谱波峰的位置, c2 是降水谱波峰谱宽 高度, 的一半。 晴空大气返回信号功率谱密度 S( v i ) 的一阶矩 v 为大气运动平均多普勒速度, 即
08 雷达参数 表 1 CFLTable 1 The darameters of radar CFL08
参数 波长 / mm 采样频率 / MHz 脉冲宽度 / μs 噪声系数 / dB 谱变换数 谱平均数 相干积分次数 距离库长 / m Nyquist 速度 / ( m·s - 1 ) 最小速度间隔 / ( m·s - 1 ) 天线增益 / dB 发射功率 / kW 探测模式 高 674 40 0. 8 2 256 6 200 120 ± 16. 7 0. 13 29 7. 7 40 4 2 512 12 50 240 ± 33. 3 0. 13 29 7. 7 低
M -1 - -
v =
v i S( v i ) Δv i ∑ i =0
M -1
v 和 w 三个分量, 以将风速分解为 u 、 规定垂直风向 上为正。在气象上, 常将风速分解成为水平风和垂 。 水平风方向记为 α H , 直风 水平风大小记为 V H , 规定水平风的来向为水平风的风向, 用 φ 表示方位 角, 取正北方向 φ = 0 , 水平风的方向 α H = φ + π 。 风廓线雷达测得的径向速度用 V r 表示, 规定径向速 度远离雷达方向为正, 朝向雷达方向为负。 径向速 、 φ) , 其中 度是距离 方位和天顶角的函数, 即 V r ( θ, θ 是波束的天顶角。由图( 2 ) , 根据几何关系可以推 v 分量的关系为 出水平风 V H 和 u 、 V H ( φ) = usinφ + vcosφ
何 越
1
何
平
2
董德保
1
窦炜明
1
( 安徽省大气探测技术保障中心1 , 合肥 230031 ;中国气象局气象探测中心2 , 北京 100081 )
摘 要 风廓线雷达在降水天气下探测到的返回信号主要包括大气湍流信号和降水粒子信号 , 其功率谱数据在结构上通常 08 型边界层风廓线雷达在降水条件下获 表现为双峰结构, 并且在一定程度上可以看成是双高斯形式的 。利用北京延庆 CFL得的探测数据, 采用双高斯拟合的方式将湍流谱和降水谱分开 , 并通过分离之后的湍流谱对不同强度的降水过程进行了垂直 速度场和水平风场的反演 。反演结果表明, 利用双高斯拟合可以有效地将湍流谱和降水谱区分开 , 反演得到的垂直速度场、 水平风场较处理之前更加精确 。 关键词 中图法分类号 风廓线雷达 双高斯拟合 风场反演 P415. 2 ; 文献标志码 A
2014 年 3 月 20 日收到 第一作者简介:何 mail:648453959@ qq. com。 越, 男。硕士。E-
子的 下 落 末 速 度 与 雷 达 后 向 散 射 的 关 系 ; Rajopadhyaya 等[6]利用 UHF 和 VHF 风廓线雷达联合观 测, 讨论了空气垂直速度对降雨率和雨滴半径的影 [7 ] 响, 并与雨量计进行了对比。 K. S. Gage 等 使用 915 MHz 风廓线雷达谱矩估计值对热带降水云系统 的不同特征进行了分析。 [8 ] 通过对 SNR、 垂 国内何平等 利用降水个例, 直速度、 降水前后雷达的探测高度等方面进行研究 , 表明风廓线雷达在降水研究中有着巨大潜力 ; 杨馨 [9 ] 蕊 利用 UHF 风廓线雷达谱矩估计值, 对不同类型 [10 ] 的降水进行了讨论; 黄伟等 通过连续方程, 利用 风廓线雷达五个波束的数据算出大气垂直运动速 度, 然后根据垂直指向波束测出的功率谱反演出雨 [11 ] 滴谱;王晓蕾等 考虑了气流与降水谱的双峰问 题, 并用简便方法将其区分然后反演出雨滴谱 。 现通过北京的几个降水特例, 首先利用双高斯 拟合将双峰识别, 然后对风场进行反演, 并对结果进 行了对比分析。研究表明, 通过该方法能够有效去 除降水对风场的影响, 能够在一定程度上对风廓线 雷达谱数据进行质量控制。
在自然条件下, 风是所有气象要素中变化最频 繁的一个。风的这种快速脉动变化, 反映了大气中 分布着各种尺度的湍流运动。 微观上看, 由于受大 气运动、 地面摩擦及太阳和地面辐射等因素的共同 影响, 使得一个地区的气流在大趋势上是指向一个 方向的, 但是局部不断受到微气团组成的旋祸的影 响, 使得风向风速在不断发生变化。 大气中湍流在 影响着局部风场的同时, 也在随风移动, 这也是风廓 [1 ] 线雷达能够在晴空天气条件下测风的原因 。 但它 风廓线雷达主要设计用来探测大气风场 , , 的动态范围很大 在探测到弱的湍流散射信号的同 时, 还可以探测到降水粒子的散射信号。 在晴空天 气下, 风廓线雷达回波为湍流散射; 在降水天气下, 风廓线雷达探测到的功率谱密度数据中包含了大气 [2 ] 垂 功率谱密度、 湍流、 降水粒子等多种回波信号 , 直径向速度、 信噪比、 谱宽比晴空天气下都有明显的 增大。实际上, 普遍认为降水天气下, 降水粒子相对 于晴空湍流来说, 是较强的散射目标, 雷达能接收到 信噪比更高的信号, 并且在结构形式上表现为双峰 。 结构 对降水天气条件下风廓线雷达的探测研究, 国 外从 20 世纪 80 年代末开始了比较多的相关研究。 [3 ] 最早 Ralph 等 就指出风廓线雷达在探测风场的同 [4 ] 时, 也能用来测量降水。 Wuertz 等 通过对几个典 型降水天气和晴空天气的研究, 给出了 UHF 风廓线 雷达降水 以 及 晴 空 天 气 下 数 据 的 特 征。 Chu Y H [5 ] 粒 等 利用 VHF 风廓线雷达研究了在降水条件下,
3
实例分析
Fig. 3
图 3 径向速度几何表示 Geometric representation of the radial velocity
妨取两个倾斜波束分别指向正北和正东, 倾斜波束 的天顶角是状态量, 以 θ 表示。 假定 V rx ,V ry 和 V rz 分别表示天顶、 正东和正北三个波束方向的径向速 度的观测值。根据式( 6 ) 有 u = V rx - V rz cosθ sinθ (7) V ry - V rz cosθ v = sinθ w = V rz v 先由式( 7 ) 通过径向速度的测量值计算出 u 、 分量, 再代入式( 5 ) 计算出水平风, 垂直风由垂直波 束直接测量得到。 三波束计算方法简单, 但由于湍流回波信号弱 雷达探测容易受到各种干扰的影响使得其中一个或 多个波束指向的测量数据受到污染可能导致计算结 果出现异常直接影响风的计算质量 。 2. 2 五波束计算水平风 在采用五波束时, 同样的一个波束指向天顶, 用 于测量垂直速度;四个倾斜波束在方位上均匀分布, 天顶角是状态量, 均为 θ , 其径向速度可以表示为 V r ( θ, φ i ) = usinθsinφ i + vsinθcosφ i + w cosθ
23 期
何
越, 等:双高斯拟合的风廓线雷达降水时的风场反演
147
直径为 D 的降水粒子存在随机的相对 布的大气中, 运动, 使降水回波信号呈现出涨落特性 , 粒子的速度 [13 ] 概率分布 W D ( v) 为 (v - v )2 1 exp - S 2 D (1) 2 σ ( D) 2π σ( D) 槡 vS v D 为直径为 D 的粒子的平均运动速度, 式 ( 1 ) 中, W D ( v) = 为它的瞬时速度, σ ( D) 是该粒子的速度方差。 从 式( 1 ) 可以看出, 粒子的速度概率分布明显成高斯 , 分布形式 所以大气湍流和降水粒子的回波信号概 [14 , 15 ] 。 率分布都可以看成是高斯型的 1. 2 双高斯拟合过程 通过对功率谱数据进行双高斯拟合, 可以将原 本的离散点函数化, 根据高斯公式, 大气湍流功率谱 数据可以表示为 2 ( x - b1 ) / c1] } s t ( v) = a1 exp{ - [ (2)