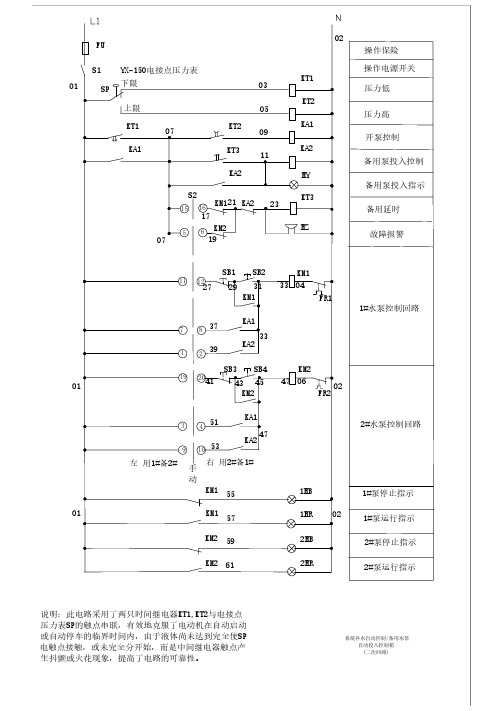
大型水塔自动控制供水线路图
管道自动补水系统二次接线原理图
1HB
2#水泵控制回路 1#泵停止指示
01
KM1 57
1HR 02
1#泵运行指示
KM2 59
2HB
2#泵停止指示
KM2 61
2HR
2#泵运行指示
说明:此电路采用了两只时间继电器KT1,KT2与电接点 压力表SP的触点串联,有效地克服了电动机在自动启动 或自动停车的临界时间内,由于液体尚未达到完全使SP 电触点接触,或未完全分开始,而是中间继电器触点产 生抖颤或火花现象,提高了电路的可靠性。
系统补水自动控制/备用水泵 自动投入控制箱 (二次回路)
FU
S1 YX-150电接点压力表
01
下限 SP
上限
KT1
07
KA1
03
05
KT2 09
KT3
11
KA2
S2
KM121 KA2
15 16
23
17
5 6 KM2
07
19
02
KT1 KT2 KA1 KA2 HY KT3 HZ
操作保险 操作电源开关 压力低 压力高 开泵控制 备用泵投入控制 备用泵投入指示 备用延时
故障报警
SB1 SB2
11 12
27
29
31
KM1
KM1 33 04
FR1
7 8 37 1 2 39
KA1
33 KA2
1#水泵控制回路
SB3 SB4
KM2
01
19 2041
43 45 47 06
02
KM2
FR2
3 4 51 9 10 53
KA1 47
KA2
左 用1#备2#
右 用2#备
本电路接线图配合电接点压力表可控制水箱水泵压力
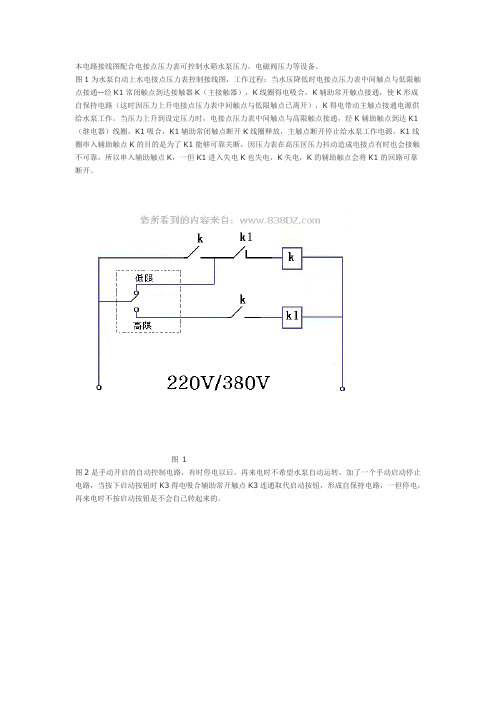
本电路接线图配合电接点压力表可控制水箱水泵压力,电磁阀压力等设备。
图1为水泵自动上水电接点压力表控制接线图,工作过程:当水压降低时电接点压力表中间触点与低限触点接通--经K1常闭触点到达接触器K(主接触器),K线圈得电吸合,K辅助常开触点接通,使K形成自保持电路(这时因压力上升电接点压力表中间触点与低限触点已离开),K得电带动主触点接通电源供给水泵工作。
当压力上升到设定压力时,电接点压力表中间触点与高限触点接通,经K辅助触点到达K1(继电器)线圈,K1吸合,K1辅助常闭触点断开K线圈释放,主触点断开停止给水泵工作电源。
K1线圈串入辅助触点K的目的是为了K1能够可靠关断,因压力表在高压区压力抖动造成电接点有时也会接触不可靠,所以串入辅助触点K,一但K1进入失电K也失电,K失电,K的辅助触点会将K1的回路可靠断开。
图1
图2是手动开启的自动控制电路,有时停电以后,再来电时不希望水泵自动运转,加了一个手动启动停止电路,当按下启动按钮时K3得电吸合辅助常开触点K3连通取代启动按钮,形成自保持电路,一但停电,再来电时不按启动按钮是不会自己转起来的。
图2
还有一种情况就是图1的线路图也有些缺陷,图1起动时是靠主电源开关来控制它工作的,因电机损坏造成开关拉弧,对人身也不是很安全的,最好能加上一个旋转开关来控制它的开停。
如图3。
多种水位控制电路图
多种水位控制电路图电气自动化2010-01-30 22:32:41 阅读92 评论0 字号:大中小一、自动水位控制器本电路能自动控制水泵电动机,当水箱中的水低于下限水位时,电动机自动接通电源而工作;当水灌满水箱时,电动机自动断开电源。
该控制电路只用一只四组双输入与非门集成电路(CD4011),因而控制电路简单,结构紧凑而经济。
供电电路采用12V直流电源,功耗非常小。
控制器电路如图1所示。
指示器电路如图2所示。
图1是控制器电路图,在水箱中有两只检测探头"A"和"B",其中"A"是下限水位探头,"B"是上限水位探头,12V直流电源接到探头"C",它是水箱中储存水的最低水位。
下限水位探头"A"连接到晶体管T1(BC547)的基极,其集电极连到12V电源,发射极连到继电器RL1,继电器RL l接入与非门N3第○13脚。
同样,上限水位探头"B"接到晶体管T2的基极(BC547),其集电极连到12V电源,发射极经电阻R3接地,并接入与非门N1第①、②脚,与非门N2的输出第④脚和与非门N3的第○12脚相连,N3第①脚输出端接到N2第⑥脚输入端,并经电阻R4与晶体管T3的基极相连,与晶体管T3发射极相连的继电器RL2用来驱动电动机M。
当水箱向水位在探头A以下,晶体管T1与T2均不导通,N3输出高电平,晶体管T3导通,使继电器RL2有电流通过而动作,因而电动机工作,开始将水抽入水箱。
当水箱的水位在探头A以上、探头B以下时,水箱中的水给晶体管T1提供了基极电压,使T1导通,继电器RLl得电吸合N3第○13 脚为高电平,由于晶体管T2并无基极电压,而处于截止状态,N1第①、②脚输入为低电平,第③脚输出则为高电平,而N2第⑥脚输入端仍为高电平,因而N2第④脚输出则为低电平,最终N3第11脚输出为高电平,电动机继续将水抽入水箱。
水塔水位的PLC控制设计

水塔水位的PLC控制设计院系名称:机电学院班级:机自074学号:200700314416指导教师:靳继勇姓名:石亚罕日期:2010 年9 月16一、目录一、目录 (2)二、前言 (3)三、设计任务书 (4)四、控制方案的选择 (6)6、硬件的选择 (6)(1)确定Plc的cpu的型号 (6)(2)液位传感器的选用 (6)7、信号指示的设计 (6)8、采用顺序启动 (6)五、输入输出的分配 (7)六、PLC接线图 (9)七、主线路原理图 (10)八、控制电路 (11)九、操作面板 (12)十、系统操作说明 (13)十一、系统的调试说明以及注意事项 (13)10、调试说明 (13)11、注意事项 (14)十二、参考书目 (14)十三、附录1:系统梯形图 (15)十四、附录2:主程序 (19)十五、课设小结 (26)二、前言在工业控制过程中, 继电接触器控制系统因其没有运算、处理、通讯等功能, 而不能完成复杂的控制方式, 20 世纪60 年代PLC 控制系统应运而生, 它综合了计算机技术、自动控制技术和通信技术等现代科技, 是当今工业自动控制的标准设备之一; 20 世纪70年代以后, 又相继出现了集散控制系统DCS、现场总线控制系统FCS, 现在以及今后很长一段时间内三种控制方式将并存。
可编程序控制器( P rogrammab le LogicCon t ro ller 简称PLC) 是一种专为在工业环境应用而设计的数字运算电子系统, 它将计算机技术、自动控制技术和通讯技术融为一体, 成为实现单机、车间、工厂自动化的核心设备, 具有可靠性高、抗干扰能力强、组合灵活、编程简单、维修方便等诸多优点。
随着技术的进步, 其控制功能由简单的逻辑控制、顺序控制发展为复杂的连续控制和过程控制, 成为自动化领域的三大技术支柱(PLC、机器人、CADö CAM ) 之一。
其主要应用的技术领域有: 顺序控制、过程控制、位置控制、生产过程的监控和管理、结合网络技术等。
PLC水塔水位控制系统

安康学院可编程逻辑控制PLC设计报告书课题名称:水塔水位自动控制系统姓名:学号:院系:专业:指导教师:时间:设计项目成绩评定表设计报告书目录一、设计目的 (1)二、设计思路 (1)三、设计过程 (1)3.1、系统论证 (1)3.2、模块设计 (3)四、系统结果 (5)五、课程设计体会与建议 (6)5.1、设计体会 (6)5.2、设计建议 (6)六、参考文献 (6)一、设计目的1、了解PLC实验箱结构及其接线方法。
2、利用PLC构成水塔水位自动控制系统。
3、了解自动控制原理在日常生活中的应用4、熟悉水塔自动控制系统的设计与制作。
二、设计思路1、按水塔水位的控制要求,设计PLC外部电路;2、连接PLC外部(输入、输出)电路,编写用户程序;3、输入、编辑、编译、下载、调试用户程序;4、运行用户程序,观察程序运行结果。
三、设计过程水塔水位控制系统是我国住宅小区、工厂企业广泛应用的供水系统。
为了达到节能的目的,提高供水系统的质量,考虑采用可编程控制器(PLC)、继电器、传感器技术和数据采集,设计一套实用水位控制方案,使系统实现自动控制,以提高控制精度、可靠性和供水质量。
并通过模拟仿真来验证程序编写的正确性。
3.1、系统方案其工作原理为:按下启动按钮,当水槽水位低于下限,补水阀答开。
高于上限时,补水阀关闭,同时,当水塔水位低于下限时,并且水槽水位高于下限时,抽水泵打开,当水塔水位高于上限时,抽水泵关闭。
水塔自动控制总体方框图如图1所示:图1 总体控制方框图3.2、模块设计水塔水位模拟图如图2所示:图2 水塔水位模拟图该电路完成两个功能:一是为水池补水;二是为水塔注水。
I/O分配表如表1所示:表1 I/O分配表输入继电器输入变量名输出继电器输出变量名X0 控制开关Y0 电磁阀X1 水塔上限液位开关Y1 电动机MX2 水塔下限液位开关X3 水池下限液位开关X4 水池上限液位开关工作过程:1)初始状态:水箱没有水,液位开关S4断开(S4为OFF)。
水塔水位PLC自动控制系统
摘要随着科技的发展,无论在日常生活中,还是在工农业发展中,PLC具有广泛的应用。
PLC的一般特点:抗干扰能力强,可靠性极高、编程简单方便、使用方便、维护方便、设计、施工、调试周期短、易于实现机电一体化。
PLC总的发展趋势是:高功能、高速度、高集成度、大容量、小体积、低成本、通信组网能力强。
目前,大量的高位生活用水和工作用水逐渐增多。
利用人工控制水位会造成供水时有时无的不稳定供水情况。
后来,使用水位控制装置使供水状况有了改变,但常使用浮标或机械水位控制装置,由于机械装置的故障多,可靠性差,给维修带来很大的麻烦。
因此为更好的保证供水的稳定性和可靠性,传统的供水控制方法已难以满足现在的要求。
本课题设计和实现了一种采用可编程序控制器为主控制机的供水控制系统。
该控制系统是一种PLC控制的自动调节控制系统,在传统水塔供水的基础上,采用PLC为控制核心、变频器等器件组成,利用水的导电性连续地全天候地测量水位的变化,把测量到的水位变化转换成相应的电信号,主控台对接收到的信号进行数据处理,完成相应的水位显示、故障报警信息显示,同时具备开启和全部停止功能,能够实现水塔水位的供水,应用此控制系统能显著提高劳动效率,减少劳动强度。
[关键词] 水位控制、PLC fx2n 自动控制目录摘要1第一章绪论 (3)1.1概述 (3)1.2可编程序控制器(PLC)简介 (3)1.3PLC工作原理 (3)1.4PLC特点 (4)1.5PLC选择 (5)第二章水塔水位系统PLC硬件设计 (6)2.1水塔水位控系统构成及其控制要求 (6)2.1.1水塔水位系统控制装置图 (6)2.1.2 水塔水位系统的输入/输出设备 (6)2.2水塔水位系统电机控制电路的设计 (7)2.3水塔水位系统水位传感器的选择 (8)2.4水塔水位系统PLC的输入/输出分配 (10)2.4.1水塔水位控制系统PLC的输入/输出接口分配表 (10)2.4.2水塔水位控制系统PLC的输入/输出接口接线图 (11)2.5水塔水位系统的元件器件 (12)第三章水塔水位控制系统PLC软件设计 (13)3.1工作过程 (13)3.2程序流程图 (14)3.3梯形图 (15)第四章总结 (16)参考文献 (17)第一章绪论1.1 概述在工业生产中,电流、电压、温度、压力、液位、流量、和开关量等都是常用的主要被控参数。
水塔水位自动控制系统设计
PLC课程设计(论文)题目名称:水塔水位自动控制系统设计系别: 电气信息工程学院专业/班级:自动化10101学号:43810612姓名:秦海龙指导教师:张丽杰目录目录 (2)前言 (3)1.系统方案 (5)2.系统组成 (6)1.1、系统工作原理框图 (6)1.2、功能原理 (6)3.系统电源电路设计 (7)1.1电源电路工作过程 (7)1.2液位传感器电路设计 (8)1.3报警显示电路设计 (9)4.系统电路设计 (10)1.1系统主干电路 (10)1.2系统手动电路 (10)1.3系统自动电路 (11)5.系统运行总体过程 (12)6.水塔水位系统PLC硬件设计 (13)1.1、水塔水位系统控制电路 (14)1.2、输入/输出分配 (14)7.水塔水位控制系统PLC软件设计 (14)1.1、程序流程图 (14)1.2、梯形图 (15)1.3、系统程序的具体分析 (17)8. 组态软件概述 (18)1.1、建立WINCC组态画面 (18)1.2 、画面演示 (19)参考文献 (26)致谢 (27)前言水塔水位控制系统是我国住宅小区广泛应用的供水系统,传统的控制方式存在控制精度低、能耗大的缺点。
在水资源日益匮乏的今天,节约用水、提高水资源的利用率就显得十分必要。
传统的水塔水位控制为粗放式的,基本没有对水泵的合理控制,且多为人为控制,工作强度大、危险。
所以除了浪费电能外,还造成了人力资源的浪费。
采用新型的PLC控制供水方式与过去旧的控制方式相比在运行中的经济性、可靠性、稳定性、等方面有显著优势,特别是在提倡低碳的情况下有很好的节能效果,且由于PLC强大的扩展性可以适应今后城市供水建设的发展。
摘要:本文采用分立元件电路实现了水塔水位的自动控制,设计出一种低成本、高使用的水塔水位控制器。
采用电容式液位传感器进行检测,采用独立的电路实现超高、低水位水位处理,自动控制电机电路。
它能自动完成上水停水的全部工作循环,保证液面高度始终处于较理想的范围内,它结构简单,制造成本低,灵敏度高,节约能源显著,是用于各种高层液位储存的理想设备。
(完整版)水位控制电路图水位控制器原理
水位控制电路图水位控制器原理1.本电路能自动控制水泵电动机,当水箱中的水低于下限水位时,电动机自动接通电源而工作;当水灌满水箱时,电动机自动断开电源。
该控制电路只用一只四组双输入与非门集成电路(CD4011),因而控制电路简单,结构紧凑而经济。
供电电路采用12V直流电源,功耗非常小。
控制器电路如图1所示。
指示器电路如图2所示。
图1是控制器电路图,在水箱中有两只检测探头"A"和"B",其中"A"是下限水位探头,"B"是上限水位探头,12V直流电源接到探头"C",它是水箱中储存水的最低水位。
下限水位探头"A"连接到晶体管T1(BC547)的基极,其集电极连到12V电源,发射极连到继电器RL1,继电器RL l接入与非门N3第○13脚。
同样,上限水位探头"B"接到晶体管T2的基极(BC547),其集电极连到12V电源,发射极经电阻R3接地,并接入与非门N1第①、②脚,与非门N2的输出第④脚和与非门N3的第○12脚相连,N3第①脚输出端接到N2第⑥脚输入端,并经电阻R4与晶体管T3的基极相连,与晶体管T3发射极相连的继电器RL2用来驱动电动机M。
当水箱向水位在探头A以下,晶体管T1与T2均不导通,N3输出高电平,晶体管T3导通,使继电器RL2有电流通过而动作,因而电动机工作,开始将水抽入水箱。
当水箱的水位在探头A以上、探头B 以下时,水箱中的水给晶体管T1提供了基极电压,使T1导通,继电器RLl得电吸合N3第○13 脚为高电平,由于晶体管T2并无基极电压,而处于截止状态,N1第①、②脚输入为低电平,第③脚输出则为高电平,而N2第⑥脚输入端仍为高电平,因而N2第④脚输出则为低电平,最终N3第11脚输出为高电平,电动机继续将水抽入水箱。
当水箱的水位超过上限水位B时,晶体管T1仍得到基极电压,继电器RLl吸合。
PLC实训程序--水塔自动供水控制
水塔自动控制一.实验目的学会利用PLC控制自动供水设备。
二.实验器材1. 可编程控制器实验台1台2. PLC-DEMO009水塔水位自动控制模拟实验板1块3. PC机或FX-20P-E编程器(自备)1台4. 编程电缆1根5. 自锁式连接导线(或扁平线)若干根三.实验原理与实验步骤1. 水塔水位自动控制,模拟实验板结构如图所示。
2. 本实验利用6个LED来指示水位的高低和电机的工作状态。
其中4个LED显示水位的高低,2个显示电机的工作状态。
3. 控制要求:(1)当水池水位低于低水位界L4时(L4=ON),阀M2打开进水;当水池水位高于高水位界时(L3=ON);则阀M2关闭。
(2)当水塔水位低于低水位界L2时(L2=ON),且水位高于低水位界;则抽水电机M1打开。
(3)当水塔水位高于高水位界时,则M1关闭。
(4)若在抽水过程中,水池水位下降到低水位界,则M1也关闭。
4. 实验步骤(1)打开实验台电源,PLC与编程器或PC机连接。
(2)根据具体情况编制输入程序,并检查是否正确。
(3)按图接线,实验台与PLC-DOME009连接,检查连线是否正确。
(4)启动设备,观察运行结果是否正确。
四.设计程序清单I/O分配指令表0 LD X0001 OUT Y0052 LDI X0033 ANI X0004 ANI Y0045 OUT Y0026 LD X0037 OUT Y0008 LD X0029 OUT Y00110 LD X00111 OUT Y00312 LD X00013 OUT Y00414 END梯形图接线图※FX系列的输出继电器的公共端:FX2N-32MR为COM0~COM4;FX2N-48MR为COM0~COM5; FX1N-60MR为COM0~COM7。
水塔供水自动控制方法
水塔供水自动控制方法嘿,咱今儿就来讲讲水塔供水自动控制这档子事儿!你说水塔供水,这可不是小事儿啊,就跟咱每天得吃饭喝水一样重要。
想象一下,要是没有个好的自动控制方法,那水塔的水要么多了溢出来,那不就浪费了嘛,要么少了不够用,那大家用水不就不方便啦!所以说,这自动控制方法可得好好琢磨琢磨。
首先呢,咱得有个灵敏的水位传感器,就像人的眼睛一样,时刻盯着水塔里面水的情况。
它能准确地告诉我们水到了啥位置,多了还是少了。
这可太关键了呀,要是没它,那不就跟盲人摸象似的,啥都不知道嘛。
然后呢,根据这个水位传感器的信号,咱得有个聪明的控制系统来做出反应。
比如说水少了,它就赶紧打开供水的阀门,让水哗哗地流进去。
水够了呢,它就又能及时地把阀门关上,不让水再往里灌啦。
你看这多像咱过日子呀,啥东西少了就赶紧去添,够了就停,不能浪费也不能短缺。
而且这个控制系统还得稳定可靠,不能三天两头出毛病,不然那可麻烦大了。
咱还可以给它设置一些好玩的功能呢,比如定时供水。
就像咱每天定时起床一样,到了点儿就自动供水,多省心呐。
或者根据用水的高峰期和低谷期来调整供水的量,这多智能呀。
还有啊,咱得定期检查和维护这个自动控制系统。
就跟咱人得定期体检一样,要是有啥小毛病赶紧修好,别等出了大问题才后悔莫及。
水塔供水自动控制方法,说起来好像挺复杂,但其实只要咱用心去弄,也不难理解。
这就好比是给咱的水塔找了个贴心的小管家,能把水管理得妥妥当当的。
咱也就能放心地用水,不用担心没水用或者水太多浪费啦。
总之啊,水塔供水自动控制可太重要啦,关系到我们日常生活的方方面面。
咱可得重视起来,选个好的控制方法,让水塔乖乖听话,给我们提供稳定又充足的水。
这样咱的生活才能顺顺利利,舒舒服服的呀,你说是不是这个理儿呢?。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电动机知识大型水塔自动控制供水线路图_电路图在自备大型水塔的单位,往往供水抽水泵电动机容量较大,一般均在40~75KW左右。
因此一般都采用工人看守水塔,并且应用降压配电柜来起动电动机。
现市场上虽有晶体管自动水位控制器出售,但对大型水位水塔供水实现自动控制还有很多连接上的问题难以解决。
〃变频器在恒压供水方面的应用〃供水专用变频器在泵站恒压供水中的应用〃超大型电动机起动方法之比较〃变频器在变频恒压供水设备中的应用〃变频器在恒压供水控制系统中的应用〃农用无塔增压式供水器电路图_电路图〃惠州阿尔法变频器在恒压供水中的应用〃变频器在恒压供水方面的应用〃变频器在恒压供水方面的应用分析〃普传变频器在供水控制系统中的应用〃变频器在恒压供水系统中的节能应用〃中、大型电动机的新包装〃恒压供水变频节能与应用匿名随着起重机的不断发展,传统控制技术难以满足起重机越来越高的调速和控制要求。
在电子技术飞速发展的今天,起重机与电子技术的结合越来越紧密,如采用PLC取代继电器进行逻辑控制,交流变频调速装置取代传统的电动机转子串电阻的调速方式等。
在选型对比基础上,本项目电动机调速装置采用了先进的变频调速方案,变频器最终选型为ABB变频器ACS800,电动机选用专用鼠笼变频电动机。
在众多交流变频调速装置中,ABB变频器以其性能的稳定性,选件扩展功能的丰富性,编程环境的灵活性,力矩特性的优良性和在不同场合使用的适应性,使其在变频器高端市场中占有相当重要的地位。
ACC800变频器是ACS800系列中具有提升机应用程序的重要一员,它在全功率范围内统一使用了相同的控制技术,例如起动向导,自定义编程,DTC控制等,非常适合作为起重机主起升变频器使用。
本文结合南京梅山冶金发展有限公司设备分公司所负责维修管理的宝钢集团梅钢冷轧厂27台桥式起重机变频调速控制系统,详细介绍ACC800变频器在起重机主起升中的应用。
1DTC控制技术DTC(直接转矩控制,DirectTorqueControl)技术是ACS800变频器的核心技术,是交流传动系统的高性能控制方法之一,它具有控制算法简单,易于数字化实现和鲁棒性强的特点。
其实质是利用空间矢量坐标的概念,在定子坐标系下建立异步电动机空间矢量数学模型,通过测量三相定子电压和电流(或中间直流电压)直接计算电动机转矩和磁链的实际值,并与给定转矩和磁链进行比较,开关逻辑单元根据磁链比较器和转矩比较器的输出选择合适的逆变器电压矢量(开关状态)。
定子给定磁链和对应的电磁转矩的实际值,可以用定子电压和电流测量值直接计算得到。
在计算中,只需要一个电动机参数―――定子电阻,这一点和几乎需要全部电动机参数的直接转子磁链定向控制(矢量控制)形成了鲜明对比,极大地减轻了微处理器的计算负担,提高了运算速度。
直接转矩控制结构较为简单,可以实现快速的转矩响应(不大于5ms)。
2防止溜钩控制Domain: dnf辅助More:d2gs2f 作为起重用变频系统,其控制重点之一是在电动机处于回馈制动状态下系统的可靠性("回馈"是指电动机处于发电状态时通过逆变桥向变频器中间直流回路注入电能),尤其需要引起注意的是主起升机构的防止溜钩控制。
溜钩是指在电磁制动器抱住之前和松开之后的瞬间,极易发生重物由停止状态出现下滑的现象。
电磁制动器从通电到断电(或从断电到通电)需要的时间大约为016s(视起重机型号和起重量大小而定),变频器如过早停止输出,将容易出现溜钩,因此变频器必须避免在电磁制动器抱闸的情况下输出较高频率,以免发生"过流"而跳闸的误动作。
防止溜钩现象的方法是利用变频器零速全转矩功能和直流制动励磁功能。
零速全转矩功能,即变频器可以在速度为零的状态下,保持电动机有足够大的转矩,从而保证起重设备在速度为零时,电动机能够使重物在空中停止,直到电磁制动器将轴抱住为止,以防止溜钩的发生。
直流制动励磁功能,即变频器在起动之前自动进行直流强励磁,使电动机有足够大的起动转矩,维持重物在空中的停止状态,以保证电磁制动器在释放过程中不会发生溜钩。
3系统硬件配置梅钢冷轧桥式起重机上应用的ACS800变频器调速系统由电控柜,大小车变频控制柜,起升变频控制柜,联动控制台等组成。
主起升采用1台ACC800变频器驱动1台起升专用电动机,并在电动机轴尾安装1台速度编码器,做速度反馈用。
该速度编码器用来提高低速状态下电动机模型的速度和转矩计算精度,保证转矩验证,开闭闸等功能。
主起升采用斩波器加制动电阻实现制动功能,斩波器与制动电阻串联后接入变频器整桥与逆变桥之间的直流回路中,并由变频器根据中间直流回路电压高低控制斩波器接通与否(即控制制动电阻的投切)。
变频器配有RPBA201接口卡件,提供标准的Profibus2DP 现场总线接口,用于与PLC通信控制,并接收PLC发来的开,停车命令和速度设定值等控制参数。
4起升变频器功能参数设置ABB变频器在出厂时,所有功能码都已设置。
但是,起重机变频调速系统的要求与工厂设定值不尽相同,所以,ACC800中一些重要的功能参数需要重新设定。
(1)起动数据(参数组99)参数99102(用于提升类传动,但不包括主/从总线通信功能):CRANE;参数99104(电动机控制模式):DTC(直接转矩控制);参数99105~99109(电动机常规铭牌参数):按照电动机的铭牌参数输入。
(2)数字输入(参数组10)参数10101~10113(数字输入接口预置参数):按照变频器外围接口定义进行设置,限于篇幅,不再赘述。
(3)限幅(参数组20)参数20101(运行范围的最小速度):-1000 r/min(根据实际电动机参数进行设定);参数20102(运行范围的最大速度):1000r/min(根据实际电动机参数进行设定);参数20103(最大输出电流):120%;参数20104(最大正输出转矩):150%;参数20104(最大负输出转矩):-150%;参数20106(直流过压控制器参数):OFF(本例中ACC800变频器使用了动力制动方式,此参数设为OFF后,制动斩波器才能投入运行)。
(4)脉冲编码器(参数组50)参数50101(脉冲编码器每转脉冲数):1024;参数50103(编码器故障):FAULT(如果监测到编码器故障或编码器通信失败时,ACC800变频器显示故障并停机)。
(5)提升机(参数组64)参数64101(独立运行选择):FALSE;64103(高速值1):98%;64106(给定曲线形状):0(直线);参数64110(控制类型选择):FBJOYSTICK.(6)逻辑处理器(参数组65)参数65101(电动机停止后是否保持电动机磁场选择):TRUE(在电动机停止后保持电动机磁场为"ON");参数65102(ON脉冲延时时间):5s.(7)转矩验证(参数组66)参数66101(转矩验证选择):TRUE(转矩验证有效,要求有脉冲编码器)。
(8)机械制动控制(参数组67)参数67106(相对零速值):3%;参数67109(起动转矩选择器):AUTOTQMEM(自动转矩记忆)。
(9)给定处理器(参数组69)参数69101(对应100%给定设置电动机速度):980r/min (根据实际电动机参数进行设定);参数69102(正向加速时间):3s;参数69103(反向加速时间):3s;参数69104(正向减速时间):3s;参数69105(反向减速时间):3s.(10)可选模块(参数组98)参数98101(脉冲编码器模块选择):RTAC2 SLOT2(脉冲编码器模块类型为RTAC,连接接口为传动控制单元的选件插槽2);参数98102(通信模块选择):FIELDBUS(激活外部串行通信并选择外部串行通信接口)。
5试运行变频调速系统的功能参数设定完后,就可进行系统试运行。
应先在变频器操作盘上进行速度给定,手动起动变频器,让起升电动机空载运转一段时间,并且这种试运行可以在5,10,15,20,25,35,50Hz等几个频率点进行,注意观察电动机的运转方向是否正确,转速是否平稳,显示数据是否正确,温升是否正常,加减速是否平滑等。
单台变频器试运行正确后,再接入脉冲编码器模块进行速度闭环调试,试运行起升机构变频调速系统。
起升变频器手动运行无误后,就可接入PLC控制系统,进行整机联调。
整机联调中,关键要注意观察变频器起动与停止时,主起升机械制动器的开闭反应是否快速,钩头是否存在溜钩现象等。
其次还要注意观察钩头在下降过程中,制动单元和制动电阻投运后,其温升是否正常。
在重物下放过程中,重物的势能会释放出来,此时电动机将工作在反向发电状态。
在钩头下降过程中,电动机通过逆变桥向变频器中间直流回路充电,当直流回路的电压高于变频器系统设定值时,变频器控制斩波器接通,进而使制动电阻投入工作,以消耗变频器中间直流回路多余的电能,确保变频器中间直流回路电压稳定在一个特定电压范围内。
随着起重机的不断发展,传统控制技术难以满足起重机越来越高的调速和控制要求。
在电子技术飞速发展的今天,起重机与电子技术的结合越来越紧密,如采用PLC取代继电器进行逻辑控制,交流变频调速装置取代传统的电动机转子串电阻的调速方式等。
在选型对比基础上,本项目电动机调速装置采用了先进的变频调速方案,变频器最终选型为ABB变频器ACS800,电动机选用专用鼠笼变频电动机。
在众多交流变频调速装置中,ABB变频器以其性能的稳定性,选件扩展功能的丰富性,编程环境的灵活性,力矩特性的优良性和在不同场合使用的适应性,使其在变频器高端市场中占有相当重要的地位。
ACC800变频器是ACS800系列中具有提升机应用程序的重要一员,它在全功率范围内统一使用了相同的控制技术,例如起动向导,自定义编程,DTC控制等,非常适合作为起重机主起升变频器使用。
本文结合南京梅山冶金发展有限公司设备分公司所负责维修管理的宝钢集团梅钢冷轧厂27台桥式起重机变频调速控制系统,详细介绍ACC800变频器在起重机主起升中的应用。
1DTC控制技术DTC(直接转矩控制,DirectTorqueControl)技术是ACS800变频器的核心技术,是交流传动系统的高性能控制方法之一,它具有控制算法简单,易于数字化实现和鲁棒性强的特点。
其实质是利用空间矢量坐标的概念,在定子坐标系下建立异步电动机空间矢量数学模型,通过测量三相定子电压和电流(或中间直流电压)直接计算电动机转矩和磁链的实际值,并与给定转矩和磁链进行比较,开关逻辑单元根据磁链比较器和转矩比较器的输出选择合适的逆变器电压矢量(开关状态)。
定子给定磁链和对应的电磁转矩的实际值,可以用定子电压和电流测量值直接计算得到。