改进的MRAS无速度传感器VC控制系统仿真研究
基于MRAS的改进型无速度传感器矢量控制系统仿真
作 者简 介 : 为 勇 ( 9 7 ) 男 , 士 研 究 生 , 要 研 究 方 向 为 电力 电子 与 运 动 控 制 。 徐 18 一 , 硕 主
4 2
青 岛大学学 报 ( 程 技术 版) 工
第 2 6卷
一
R + + s L L孥
一
( 3)
在 两相 静止 坐标 系上 , 子磁链 在 a p轴 _ O 量为 转 — L0 分
为平 台 , 验证 了新 的速度估 计 方法 的正 确性 。
1 无速 度传 感器 矢量 控 制 系统 的设计
1 1 无 速 度 传 感 器 矢 量 控 制 系 统 的 基 本 方 程 .
异 步 电动机 在两 相静 止坐标 系 上 的电压 方程式 _ 为 5
R + L。 P
0
一
卉 一JW) ( or L T ̄ ,
赤 ‘ + T 址 L r ) m
( 8 )
( 9 )
一
式 中 , =L / 为转 子 电磁 时 间常 数 。 T = 尺 =
L 分别 为两 相坐标 系 上定子 、 子 自感 ; 为两相 坐标 系上 同轴 定子 、 转 L 转子 问 的互感 。 由式 ( )的第 1 2行 可得 定子 回路 的两相 电压 方程 为 1 ,
一
பைடு நூலகம்
R + + sL L 誓
( 2 )
收 稿 日期 :2 1 一O 0 1 4—2 7
0
R。 L + P
L P
0
0
L P
L P
L
R L P +
c o L
() 1
J
L— c
LP
一
R +L
一种改进的异步电机无速度传感器的直接转矩控制系统
关键 词 :直接转矩控制 异步电动机 磁链辨识 模型参考 自适应系统 模 糊控制
[ 中图分类号]T 4 [ M33 文献标志码 ]A [ 文章编号]10 3 8 (0 2 0 0 1 3 00— 86 2 1 )4- 03—0
An I r v d Id c i n Mo o e d S n o ls r c r u n r l s e mp o e n u t t rSp e e s r s Di tTo q e Co to o e e Sy t m
c nr le o rdu e t Ipa a ee so h pe d nc n t y t m a a tr o i o e t e o a e o he whoe c n r l o tol rt e c he P rm t r ft e de n e e o he s se p r mee s t mprv he p r r nc ft f m l o to
() 3
(响应迅速 , 是一种具有高静 、 动态性 能
的交流调速方法 。在高性能 的 D C中, T 转速 的闭环控制环 节
一
般是必不 可少 的。通 常采用光 电编码 器等速度 传感器 来进 行
电磁转矩方程 :
Li +Li , ,
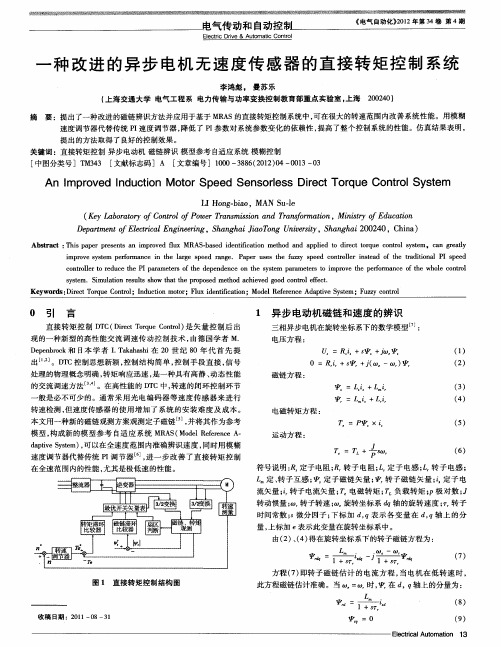
转 速检测 , 但速度传感器 的使用增加 了系统 的安装 难度及 成本 。 本 文用一种新 的磁链 观测方案 观测定子磁链 , 并将其作为参考 模型, 构成新 的模 型参考 自适 应 系统 M A ( d l e rneA R S Moe R f ec . e d p v yt , 以在全速度范围 内准确辨识速度 , at eSs m) 可 i e 同时用模 糊 速度调节器代替传统 P 调节器 , I 进一步 改善 了直接转 矩控 制 在全速范围 内的性能 , 尤其是极低速 的性能 。
一种改进的MRAS观测器及异步电机转速估计方法的研究
0引言
磁 场定 向控 制 已成 为 控 制交 流 异 步 电机调 速 系 统 的一 种 成 熟 方法 ,在 现 代 工业 驱 动 中磁场 定 向控 制 被 广 泛 应用 ,展 现 了 高性 能 。在 异 步 电机 驱 动 装 置 中 ,提 高驱 动 系 统 的稳 定 性 日益 成 为一
磁链 的相位和幅值 ,而无速度传感器矢量控制系 统需要估计Байду номын сангаас子转速 ,在实际 中测量 电压和电流 是 比较容易的 ,因此可知无速度传感器矢量控制
能运行。
关键词 :无速 度传感 器 ; 矢 量控制 ;磁链 观测器 ;模型参考 自适应 ;转速估算
中图分 类号:T M3 4 3 文献标识码 :A 文章编号 :1 0 0 9—9 4 9 2( 2 0 1 3 ) 0 5—0 0 1 5一o 4
An I mp r o v e d M RAS Ob s e r v e r a n d As y n c h r 0 n 0 u s Mo t o r S p e e d Es t i ma t i o n Me t h o d Re s e a r c h
l f u x e s t i ma t i o n p r e c i s i o n, f a s t c o n v e r g e n c e r a t e , l o w s p e e d s t a b l e p e fo r m a r n c e .B a s e d o n t h e i mp r o v e me n t o f t h e lu f x o b s e r v e r a s
摘要:为 了提 高异步电机无 速度传感器矢量控制 系统 的低 速性 能以及 降低对电机参数变化 的敏感性 ,提 出了一种改进 的转子磁
基于定子电流模型的MRAS系统仿真研究

( c o l f lcr a E gn eig n fr t n S uh et e oe m Unv ri , h n d , 1 5 0 S h o o Eet c l n ier dI omai , o tw s P t l iesy C e g u 6 0 0 ) i n a n o r u t
S m u a i n Re e r h o R AS Sy t m s d o t t rCur e tM o l i l to s a c fM se Ba e n S a o r n de
Y n Ka J a g Li Li o gb Y n J e ig i in n n o H a g i
A s i一i输入到转速 自适应 P i= s s I调节器 来得到转速 观测值 ,但 由于 电流误差 △ 为一矢量 ,静止坐标
感应 电机 。矢量控制 的关键 问题是转子磁场 的准确定
向,只有准确得到磁链 的幅值和空 间位置 ,才能准确 的得到定子 电流的励磁分量和 转矩分量 ,从而实现定
d i: 1 l “ AI B II + s s
f I l 模 型,构成模型参考 白适应系统来辨识转 速和转子磁链 ,不涉及 电压模型 中的纯积分环节和 电
式中,U、i s 分别为定子电压 、电流矢量, 为转子磁
势计算, 从而可 以改善传统的 MR AS矢量控制系统存
(M )[ ]来 估 计转 子磁 链 。 I 4 - 5
矢 量控制的基本原理就是通过坐标变换和磁场 定 向, 定子电流分解 为励磁分量 i 和转矩分量 i,转 将 。 。 子磁链仅 由定子励磁 电流产生 , 电磁转矩 正 比于 而 转子磁链和 定子电流转矩分量 的乘积 ,从而实现 了磁通和转矩 的解耦控制 ,还 降低 了电机数学模型的 阶次 ,然后按照直流电机 的转矩和转速控制规律控制
基于MRAS的异步电机无速度传感器矢量控制
基于MRAS的异步电机无速度传感器矢量控制异步电机矢量控制无速度传感器模型参考自适应1引言随着电力电子技术及自动控制技术的发展,交流电动机的调速系统正走向高性能化。
在高性能的交流调速系统中,为了提高系统的控制性能,转速的闭环控制环节一般是必不可少的。
通常,速度反馈量的检测多是采用光电脉冲编码器或测速发电机。
但高精度的速度传感器价格比较昂贵,明显增加了整个控制系统的成本。
同时速度传感器的安装存在同心度问题,由于安装中存在的问题使速度传感器成为系统的故障源,系统的机械可靠性大为降低,由此可以说在某种程度上破坏了交流异步电动机的简单、牢固等特性,限制了交流调速系统的应用范围。
因此研究无速度传感器交流调速系统,受到了国内外学术界和工程界高度重视,成为近年来的研究热点[1]。
无速度传感器矢量控制技术的核心问题是对磁链和转速进行准确辨识。
常见的磁链辨识方法有:电流模型法和电压模型法。
因电流模型需要转子转速的信息,而电压模型中不需要转子转速信息,所以无速度传感器矢量控制系统中通常采用电压模型进行磁链辨识[2]。
电压模型中含有纯积分环节,使得磁链的观测会因积分初值和漂移产生误差。
为了解决这一问题,可以采用一阶惯性环节来代替纯积分环节,由此引起的误差,可以通过参考磁链矢量经低通滤波器后的信号进行补偿[3-4]。
在磁链辨识基础上,需要对电机转速进行辨识。
近年来,随着高性能数字信号处理器的飞速发展,各种转速估计方法层出不穷。
如:直接计算法、模型参考自适应(MRAS—Model Reference Adaptive System)、基于自适应全阶状态观测器的方法、扩展卡尔曼滤波器法(EKF—Extended Kalman Filter)、神经网络法、齿槽谐波检测法、高频信号注入法等。
因MRAS原理简单、容易实现,在无速度交流调速系统中得到了广泛应用。
MRAS参数辨识思想:将不含待辨识参数的模型作为参考模型,将含有待辨识参数的模型作为可调模型,且两个模型具有相同物理意义的输出量,利用其输出量误差,并通过合适的自适应率来调节可调模型参数,已达到控制对象的输出跟踪参考模型的目的。
基于典型MRAS无速度传感器矢量控制系统的改进研究

关 键 词 :矢 量控 制 ;无 速 度 传 感 器 ;MR S A ;仿 真
中 图 分 类 号 :T 0 H1
文 献 标 识码 :A
文 章 编号 :17 -1x 2 1 ) 50 3 - 626 2 (0 1 0 -0 50 9
0 引 言
无速 度传 感器 控制 的关键 在 于 精 确 的转 速 估 计 与解 耦 控 制 , 但这 两 者 之 间 又存 在 相 互 耦 合 的关 系。 转 速估计 不仅 与定 子 电压 和 电流有关 , , 2 同时 还与 电机 参数 密 切相 关 。 在数 字化 电机控 制 系 统 中 , 3 转速 估计 的精度 与采 样频率 以及反 馈 信号 的 分辨 率有 关 J而转 速估 计 的精 确程 度 不 仅影 响到 速度 控制 , 的准 确度 , 也会影 响 到速度环 路补偿 器 的设 计 。为了实 现高性 能 的交 流调 速 , 速度 传感 器矢 量 控 制需 要 无 复杂 的控 制技 术 , 要 进 行 矢 量 的 坐 标 变 换 , 通 矢 量 的在 线 计 算 和 自适 应 参 数 变 化 而 修 正 磁 通 模 如 磁 型¨ , 以及 内部 的加速 度 、 度 、 环控制 的在线 实时调节 。 由于 MR S 模型参 考 自适 应 系统 m d e 速 外 A( oer- f
r
式中:
u “ u u — —定 子 、 子的 电压 B 转
i i i i —— 定子 、 、 B 转子 的电 流 L— —定 子 与转子 同轴等效 绕组 间的 感
L— —定 子等 效两相 绕组 问 的 自感 L—— 定 子等效 两相绕 组 间的 自感 ∞ —— 转 子角速 度
收 稿 日期 :0 1 30 21- - 0 7 回 修 日期 :0 1 32 2 1- -1 0 作者简介 : 罗龙 (9 8一) 男 , 17 , 讲师 , 主要研究方 向: 汽车电器 。
基于MRAS的无速度传感器感应电机DTC系统研究

p p v y e a i ̄ te r ,teifu n ec u e y te sao eitn ev rain i ei n td b o o  ̄h p mt l h oy h nle c a sd b ttrrs a c ait s l b i h s o miae y ̄e b c e d a kt h
于电压参考模 型采 用纯积分型转子磁链 电压方程 , 积分初值 累积 以及 定子 电阻变化都 导致磁链 观测误差较 大, 进
而 影 响速 度 辨 识精 度 。通 过 引入 输 出滤 波 环 节 改进 了纯 积 分 器存 在 的 不 足 , 利 用 ppv超 稳 定 性 理 论 设 计 了一 并 oo
( ia a w yV ct nl Tc n a Istt, ia , hax 10 4 C ia X ’nR i a oaoa ( eh i lntu X ’n S ani 0 1 , h ) l i c i e 7 n
电气工程中电动机控制技术的最新研究成果
电气工程中电动机控制技术的最新研究成果在电气工程领域,电动机控制技术一直是研究的重点之一。
随着科技的不断进步,近年来在这一领域取得了诸多令人瞩目的研究成果,为提高电动机的性能、效率和可靠性提供了有力的支持。
电动机作为将电能转化为机械能的关键设备,广泛应用于工业生产、交通运输、家用电器等众多领域。
因此,对电动机控制技术的研究和改进具有重要的现实意义。
在最新的研究成果中,先进的传感器技术发挥了重要作用。
高精度的位置传感器、速度传感器和电流传感器等能够实时、准确地获取电动机的运行状态信息,为精确控制提供了数据基础。
例如,基于磁阻效应的新型位置传感器,具有更高的分辨率和更低的成本,能够有效提高电动机位置检测的精度。
智能控制算法的应用也是一大亮点。
模糊控制、神经网络控制等智能算法逐渐被引入到电动机控制中。
模糊控制能够根据模糊规则和模糊推理,对电动机的运行进行灵活的控制,尤其在处理复杂、非线性的系统时表现出色。
神经网络控制则通过模拟人脑神经元的工作方式,实现对电动机的自适应控制,能够自动适应系统的变化和不确定性。
另外,无传感器控制技术取得了显著进展。
传统的电动机控制往往依赖于各种传感器来获取运行参数,但传感器的存在不仅增加了系统的成本和复杂性,还可能降低系统的可靠性。
无传感器控制技术通过对电动机的电压、电流等信号进行分析和处理,实现对电动机速度、位置等参数的估算和控制。
例如,基于模型参考自适应系统(MRAS)的无传感器控制方法,能够在较宽的速度范围内实现准确的速度估算。
在电力电子技术方面,新型功率器件的出现推动了电动机驱动系统的发展。
宽禁带半导体器件,如碳化硅(SiC)和氮化镓(GaN)器件,具有更低的导通电阻、更高的开关速度和更高的工作温度,能够显著提高电动机驱动系统的效率和功率密度。
多相电动机控制技术也逐渐受到关注。
与传统的三相电动机相比,多相电动机具有更高的功率密度、更低的转矩脉动和更好的容错能力。
通过合理的控制策略,可以充分发挥多相电动机的优势,提高系统的性能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Ba e n I p o e RAS Sp e n o l s s d o r v d M m e d Se s r s e
程 名 明 互 崂 整 程 尹 曼 备 阳 胡 晓 昔
( 海 电力 学院 电力与 自动化 工程 学院 , 海 上 上 209 ) 000
moo a e pe iey d rv d b p e e o nio to trc n b rcs l e e y s e d rc g t n meh d;a d te c nrls se fau e a td n mi ep n e,s l se d —tt ro , i i n h o to y tm e trs fs y a c rs o s mal ta ysae err
a d srn a a it fa t— itr a c fla n to g c p bl yo nidsu b n e o o d,a d i p se ssg o tt n y a cc nrlp ro ma c . i n t o s se o d sai a d d n mi o to efr n e c
Smuiksf r ni n n , h e trcnrl( C)ss m o sn ho osmoo ae n m d l eeec d piess m ( A i l ot ee vr me t tevco ot n wa o o V yt fay c rn u trbsdo o uerfrn ea a t yt e v e MR S)
Absr c : Ai n tt eis e xsi n AC ta s s in s se ,e g ta t mig a h su se it ngi rn miso y tm . .,p e iec n rla d s e d rc g iinfra y c r n u tr n e rcs o to n p e e o n t o sn h o o smoo ,u d r o
摘
要 :针对 交流 传动 系统 中异 步 电机 的精 确控 制和 速度 辨识 等 问题 , S u n 软件 环境 中 , 基于模 型参 考 自适 应 系统 ( R S 在 i lk m i 对 M A)
无速 度传 感器 的异 步 电机 的矢量 控制 ( C 系统进行 了研 究 。系统 采用 按转 子磁 场定 向的 V V ) c对 异步 电机进 行控 制 , 过 M A 辨 识 通 R S 算 法 估算 电机 转速 , P p v 稳定 定理 对磁链 偏差 进行 收敛 。由于速 度辨 识算 法 中 电压模 型 的纯 积 分环 节会 引 起误 差 积 累和漂 移 由 oo 超 问题 , 故采 用改 进积 分型 转子 磁链估 算模 型来 解决 这一 问题 。仿 真结 果表 明 , 度辨 识方 法能 够准 确 推算 出 电机转 速 , 速 控制 系 统动 态
Ke wo d :A y coo smo r S edsnols Mo e rfrnea a t esse MR ) VetrcnrlVC) S e drcg io y r s sn rnu t pe e sr s o e dl eee c dpi ytm( AS v co o t ( p e e ont n o i
改进 的 MR AS无速度传感器 V C控制系统仿真研 究
程启 明 , 等
改 进 的 MR S 速 度 传感 器 V A 无 C控 制 系统 仿 真 研 究
Si ua in Re e r h o c orCo to y t m lt s a c fVe t n r lS s em o
响应 快 、 态静 差小 、 负载扰 动 能力强 , 稳 抗 具有 良好 的 动静态 控制 性能 。 关 键 词 :异 步 电机 无速 度传 感器 模 型参 考 自 应 系统 ( R S 矢 量 控制 适 MA)
文 献标 志码 :A
速度 辨识
中图