机械设计基础课程答案天津大学少学时李秀珍(20200723161018)
(完整版)《机械设计基础》答案
《机械设计基础》作业答案第一章平面机构的自由度和速度分析1-11-21-31-41-5自由度为:11 19211)0192(73')'2(3=--=--+⨯-⨯=--+-=FPPPnFHL或:1182632 3=-⨯-⨯=--=HLPPnF1-6自由度为11)01122(93')'2(3=--+⨯-⨯=--+-=FPPPnFHL或:11 22241112832 3=--=-⨯-⨯=--=HLPPnF1-10自由度为:1128301)221142(103')'2(3=--=--⨯+⨯-⨯=--+-=F P P P n F H L或: 122427211229323=--=⨯-⨯-⨯=--=HL P P n F1-1122424323=-⨯-⨯=--=HL P P n F1-13:求出题1-13图导杆机构的全部瞬心和构件1、3的角速度比。
1334313141P P P P ⨯=⨯ωω11314133431==P P ω1-14:求出题1-14图正切机构的全部瞬心。
设s rad /101=ω,求构件3的速度3v 。
s mm P P v v P /20002001013141133=⨯===ω1-15:题1-15图所示为摩擦行星传动机构,设行星轮2与构件1、4保持纯滚动接触,试用瞬心法求轮1与轮2的角速度比21/ωω。
构件1、2的瞬心为P 12P 24、P 14分别为构件2与构件1相对于机架的绝对瞬心1224212141P P P P ⨯=⨯ωω121214122421r P P ==ω 1-16:题1-16图所示曲柄滑块机构,已知:s mm l AB /100=,s mm l BC /250=,s rad /101=ω,求机构全部瞬心、滑块速度3v 和连杆角速度2ω。
在三角形ABC 中,BCA AB BC∠=sin 45sin 0,52sin =∠BCA ,523cos =∠BCA , 045sin sin BCABC AC=∠,mm AC 7.310≈s mm BCA AC P P v v P /565.916tan 1013141133≈∠⨯===ω1224212141P P P P ωω=s rad AC P P P P /9.21002101001122412142≈-⨯==ωω1-17:题1-17图所示平底摆动从动件凸轮1为半径20=r 的圆盘,圆盘中心C 与凸轮回转中心的距离mm l AC 15=,mm l AB 90=,s rad /101=ω,求00=θ和0180=θ时,从动件角速度2ω的数值和方向。
机械设计基础答案
《机械设计基础》作业答案 第一章 平面机构的自由度和速度分析 1-1
1-2 1-3
1-4 1-5 自由度为: 1119211)0192(73')'2(3FPPPnFHL
或: 11826323HLPPnF
1-6
自由度为 11)01122(93')'2(3FPPPnFHL
或:
11222411128323HLPPnF
1-10 自由度为: 1128301)221142(103')'2(3FPPPnFHL
或: 122427211229323HLPPnF
1-11
22424323HLPPnF 1-13:求出题1-13图导杆机构的全部瞬心和构件1、3的角速度比。 1334313141PPPP 141314133431PPPP
1-14:求出题1-14图正切机构的全部瞬心。设srad/101,求构件3的速度3v。 smmPPvvP/20002001013141133 1-15:题1-15图所示为摩擦行星传动机构,设行星轮2与构件1、4保持纯滚动接触,试用瞬心法求轮1与轮2的角速度比21/。
构件1、2的瞬心为P12 P24、P14分别为构件2与构件1相对于机架的绝对瞬心
1224212141PPPP 1212141224212rrPPPP
1-16:题1-16图所示曲柄滑块机构,已知:smmlAB/100,smmlBC/250,srad/101,求机构全部瞬心、滑块速度3v和连杆角速度2。
在三角形ABC中,BCAABBCsin45sin0,52sinBCA,523cosBCA, 045sinsinBCABCAC
,mmAC7.310
《机械设计基础》答案

《机械设计基础》作业答案第一章平面机构的自由度和速度分析1-11-21-31-41-5自由度为:F 3n(2P P P')F'L H37(2910)1 211911或:F3n2P PL H3 6 28111-6自由度为F3n(2P P P')F'L H39(21210)11或:F 3n2P PL H3821112422111-10自由度为:F 3n(2P P P')F'L H310(214122)1302811或:F 3n2P PL H39212122724211-11F3n2P PL H3 4 24221-13:求出题1-13图导杆机构的全部瞬心和构件1、3的角速度比。
P P P P1141333413P P41P P1314131-14:求出题1-14图正切机构的全部瞬心。
设10r ad/s1,求构件3的速度v3。
v v3P13P P 102002000mm/s114131-15:题1-15图所示为摩擦行星传动机构,设行星轮2与构件1、4保持纯滚动接触,试用瞬心法求轮1与轮2的角速度比/12。
构件1、2 的瞬心为P12P、P分别为构件2 与构件1相对于机架的绝对瞬心P P P P114122241234132414P P 2r 1 2P Pr214 1211 - 16 :题 1-16 图所示曲柄滑块机构,已知:lAB100m m / s , lBC250 mm / s,110r ad / s,求机构全部瞬心、滑块速度v 和连杆角速度 。
32在三角形 ABC 中,BC sin 45 0AB sin BCA,sinBCA2 23 , cos BCA55,AC sin ABCBC sin 45,AC 310.7m mvv 3P13P P10 A C tan BCA 916.565mm / s1 14 13P PP P 114 122 24 122P P14 12 P P24 121100 10 2 AC 1002.9r ad / s1-17:题 1-17 图所示平底摆动从动件凸轮 1 为半径 r20 的圆盘,圆盘中心 C 与凸轮回转中心的距离 lAC15m m, lAB90 mm,10r ad / s1,求0 和180时,从动件角速度 的数值和方向。
【机械设计基础】(第五版)课后习题答案10-14章答案(精选五篇)[修改版]
![【机械设计基础】(第五版)课后习题答案10-14章答案(精选五篇)[修改版]](https://img.taocdn.com/s3/m/3bea1552f524ccbff02184e3.png)
第一篇:【机械设计基础】(第五版)课后习题答案10-14章答案10-1证明当升角与当量摩擦角符合时,螺纹副具有自锁性。
当时,螺纹副的效率所以具有自锁性的螺纹副用于螺旋传动时,其效率必小于50%。
10-2解由教材表10- 1、表10-2查得,粗牙,螺距,中径螺纹升角,细牙,螺距,中径螺纹升角对于相同公称直径的粗牙螺纹和细牙螺纹中,细牙螺纹的升角较小,更易实现自锁。
10-3解查教材表10-1得粗牙螺距中径小径螺纹升角普通螺纹的牙侧角,螺纹间的摩擦系数当量摩擦角拧紧力矩由公式可得预紧力拉应力查教材表9-1得35钢的屈服极限拧紧所产生的拉应力已远远超过了材料的屈服极限,螺栓将损坏。
10-4解(1)升角当量摩擦角工作台稳定上升时的效率:(2)稳定上升时加于螺杆上的力矩(3)螺杆的转速螺杆的功率(4)因速下降,,该梯形螺旋副不具有自锁性,欲使工作台在载荷作用下等需制动装置。
其制动力矩为10-5解查教材表9-1得Q235的屈服极限,查教材表10-6得,当控制预紧力时,取安全系数由许用应力查教材表10-1得的小径由公式得预紧力由题图可知,螺钉个数,取可靠性系数牵曳力10-6解此联接是利用旋转中间零件使两端螺杆受到拉伸,故螺杆受到拉扭组合变形。
查教材表9-1得,拉杆材料Q275的屈服极限,取安全系数,拉杆材料的许用应力所需拉杆最小直径查教材表10-1,选用螺纹()。
10-7解查教材表9-1得,螺栓35钢的屈服极限,查教材表10-6、10-7得螺栓的许用应力查教材表10-1得,的小径螺栓所能承受的最大预紧力所需的螺栓预紧拉力则施加于杠杆端部作用力的最大值10-8解在横向工作载荷作用下,螺栓杆与孔壁之间无间隙,螺栓杆和被联接件接触表面受到挤压;在联接接合面处螺栓杆则受剪切。
假设螺栓杆与孔壁表面上的压力分布是均匀的,且这种联接的预紧力很小,可不考虑预紧力和螺纹摩擦力矩的影响。
挤压强度验算公式为:其中;为螺栓杆直径。
螺栓杆的剪切强度验算公式其中表示接合面数,本图中接合面数。
(完整版)机械设计基础课后习题答案.

第三章部分题解参考3-5 图3-37所示为一冲床传动机构的设计方案。
设计者的意图是通过齿轮1带动凸轮2旋转后,经过摆杆3带动导杆4来实现冲头上下冲压的动作。
试分析此方案有无结构组成原理上的错误。
若有,应如何修改?习题3-5图习题3-5解图(a) 习题3-5解图(b) 习题3-5解图(c) 解 画出该方案的机动示意图如习题3-5解图(a),其自由度为:14233 2345=-⨯-⨯=--=P P n F 其中:滚子为局部自由度计算可知:自由度为零,故该方案无法实现所要求的运动,即结构组成原理上有错误。
解决方法:①增加一个构件和一个低副,如习题3-5解图(b)所示。
其自由度为:115243 2345=-⨯-⨯=--=P P n F ②将一个低副改为高副,如习题3-5解图(c)所示。
其自由度为:123233 2345=-⨯-⨯=--=P P n F 3-6 画出图3-38所示机构的运动简图(运动尺寸由图上量取),并计算其自由度。
习题3-6(a)图 习题3-6(d)图解(a) 习题3-6(a)图所示机构的运动简图可画成习题3-6(a)解图(a)或习题3-6(a)解图(b)的两种形式。
自由度计算:1042332345=-⨯-⨯=--=P P n F习题3-6(a)解图(a)习题3-6(a)解图(b)解(d) 习题3-6(d)图所示机构的运动简图可画成习题3-6(d)解图(a)或习题3-6(d)解图(b)的两种形式。
自由度计算:1042332345=-⨯-⨯=--=P P n F习题3-6(d)解图(a) 习题3-6(d)解图(b)3-7 计算图3-39所示机构的自由度,并说明各机构应有的原动件数目。
解(a) 10102732345=-⨯-⨯=--=P P n FA 、B 、C 、D 为复合铰链原动件数目应为1说明:该机构为精确直线机构。
当满足BE =BC =CD =DE ,AB =AD ,AF =CF 条件时,E 点轨迹是精确直线,其轨迹垂直于机架连心线AF解(b) 1072532345=-⨯-⨯=--=P P n FB 为复合铰链,移动副E 、F 中有一个是虚约束 原动件数目应为1说明:该机构为飞剪机构,即在物体的运动过程中将其剪切。
机械设计基础习题答案
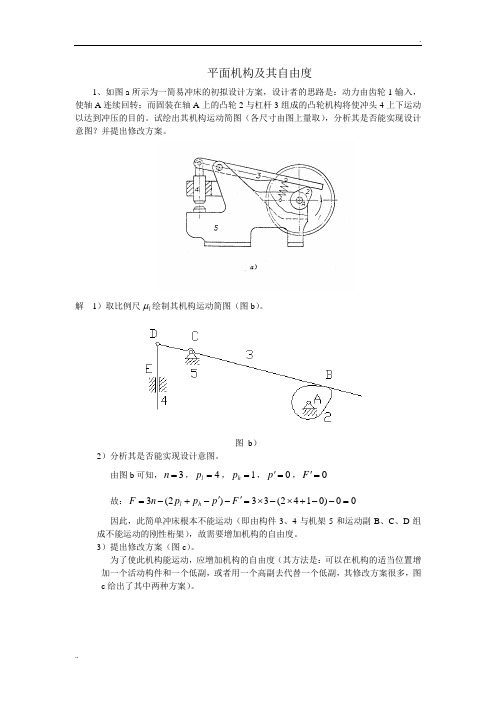
平面机构及其自由度1、如图a 所示为一简易冲床的初拟设计方案,设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构将使冲头4上下运动以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析其是否能实现设计意图?并提出修改方案。
解 1)取比例尺l μ绘制其机构运动简图(图b )。
图 b )2)分析其是否能实现设计意图。
由图b 可知,3=n ,4=l p ,1=h p ,0='p ,0='F故:00)0142(33)2(3=--+⨯-⨯='-'-+-=F p p p n F h l因此,此简单冲床根本不能运动(即由构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架),故需要增加机构的自由度。
3)提出修改方案(图c )。
为了使此机构能运动,应增加机构的自由度(其方法是:可以在机构的适当位置增加一个活动构件和一个低副,或者用一个高副去代替一个低副,其修改方案很多,图c 给出了其中两种方案)。
图c 1)图c 2)2、试画出图示平面机构的运动简图,并计算其自由度。
解:3=n,4=lp,0=hp,123=--=hlppnF解:4=n,5=lp,1=hp,123=--=hlppnF3、计算图示平面机构的自由度。
解:7=n,10=lp,0=hp,123=--=hlppnF解:8=n ,11=l p ,1=h p ,123=--=h l p p nF,局部自由度解:9=n ,12=l p ,2=h p ,123=--=h l pp n F解: D,E,FG 与D ,H ,J ,I 为对称结构,去除左边或者右边部分,可得,活动构件总数为7,其中转动副总数为8,移动副总数为2,高副数为0,机构自由度为1。
(其中E 、D 及H 均为复合铰链)4、试求图示各机构在图示位置时全部瞬心的位置(用符号ij P 直接标注在图上)。
机械设计基础少学时答案
机械设计基础少学时答案【篇一:推荐_机械设计基础2008-2009b答案】基础》48学时试卷(b)卷考试时间100分钟考试方式:闭卷案。
1.下列关于“机器”说法不正确的是:a:机器是由多个构件组成b:机器能够完成能量的传递或转换c:机器可以由一个或多个机构组成d:组成机器的各部分之间可以不具有确定的相对运动2.机构具有确定相对运动的条件是。
(a)f≥0 (b)n≥4(c)w1(d)f=w【d】【d】3.在凸轮机构中,基圆半径取得越小,则凸轮机构的结构越紧凑,但过小的基圆半径会导致压力角____a:变小 b:不变 c:变大d.不能确定【c】4.一对标准直齿圆柱齿轮标准中心距为a0=100mm,传动比i0=3,如果安装时实际中心距a=100.1mm时,则实际传动时传动比i等于a:3.01 b:3c: 3.33 d:2.67【b】5.循环特性r=-1的应力称为:a:对称循环变应力c:静应力b:脉动循环变应力 d:一般非对称循环变应力【a】6.用齿条刀具加工标准齿轮时,如果被加工齿轮的齿数小于___时,则会产生根切。
a:14 b:15 c:16 d:17【d】7.一转动导杆机构的主动件曲柄匀速转动,行程速比k=1.5,则导杆的摆角为: a:0度b:36度c:45度d:90度【b】8.在齿轮传动中,轮齿发生折断的危险截面在:a:齿顶部分b:齿根部分c:节线附近d:沿齿面逐渐变化【b】9.公称直径相同时,细牙螺纹和粗牙螺纹相比,因细牙螺纹的螺距小,内径大,故细牙螺纹_______。
a:自锁性好,强度低 b:自锁性好,强度高c:自锁性差,强度高d:自锁性差,强度低【b】10.下列关于各类键连接中键的工作面说法正确的是:a:平键的工作面是上下面 b:半圆键的工作面是上平面c:楔键的工作面是两侧面 d:楔键的工作面是上下面11.闭式齿轮传动,在设计硬齿面齿轮时应该采用的强度设计准则是:a:先按照接触疲劳强度设计,再按照弯曲疲劳强度校核b:先按照弯曲疲劳强度设计,再按照接触疲劳强度校核c:只需按照弯曲疲劳强度设计,不需要校核d:只需按照接触疲劳强度设计,不需要校核12.既承受弯矩又承受转矩的轴叫做:a:转轴b:主轴c:心轴d:传动轴【d】【b】【a】13.向心角接触轴承的接触角的取值范围是:14.在下列轴承中,只能承受径向力的轴承类型是:a:深沟球轴承 b:圆锥滚子轴承c:推力球轴承d:圆柱滚子轴承【b】【d】15.行星轮系和差动轮系的区分依据是:a:中心轮是否固定 b:轮系的自由度数c:是否存在行星架 d:齿轮轴线位置是否固定二、填空题:(共15分)把答案填在题中横线上。
机械设计基础答案
1 为半径 r 20 的圆盘, 1 10rad /s,求
圆盘中心 C 与凸轮回
0°和
1800 时,从
PP 1 12 1^
R P 2I 2 23I
IP2P13I IP12P23I 1
方向如图中所示
15 10 2rad / 90 15 s
当 180°时
方向如图中所示
第二章平面连杆机构 2-1 试根据题 2-1 图所注明的尺寸判断下列铰链四杆机构是曲柄摇杆机构、 双摇杆机构。
sin ABC
sin
V 3
Vp13
45° 1IR4R3I 10 |AC|tan BCA 916.565mm/s
PP J 14 12|
^P 24 p2|
IP14P12I IP24P12I 1
100 10 逅 AC 100
2.9ra /s d
1 — 17:题 1-17 图所示平底摆动从动件凸轮
转中心的距离 IAC 15mm,lAB 90mm,
工作行程曲柄的转角
1 210°
则空回程曲柄的转角
2 150°
摇杆工作行程用时 7s,则可得到空回程需时:
t2 ” 5s (2100/7)
(2)由前计算可知,曲柄每转一周需时
1620 口 n —— 5r
2-5 设计一脚踏轧棉机的曲柄摇杆机构,如题
° 摆 10 ,且 lCD 500mm,lAD 1000mm。
双曲柄机构还是
(4)双摇杆机构 2-3 画出题 2-3 图所示各机构的传动角和压力角。图中标注箭头的构件为原动件。
2- 4 已知某曲柄摇杆机构的曲柄匀速转动,
° 极位夹角 0 为 30 ,摇杆工作行程需时 7s。试问:
(1)摇杆空回程需时几秒?(
机械设计基础课后习题与答案
机械设计基础1- 5至1-12 指出(题1-5图~1-12图)机构运动简图中的复合铰链、局部自由度和虚约束,计算各机构的自由度,并判断是否具有确定的运动。
1-5 解F =3n 2P L P H =3 6 2 8 1=11-6 解F =3n 2P L P H =3 8 2 11 1=11-7 解F =3n 2P L P H =3 8 2 11 0=21-8 解F =3n 2P L P H=3 6 2 8 1=11-9 解F =3n 2P L P H =3 4 2 4 2=21-10 解F =3n 2P L P H=3 9 2 12 2=11-11 解F =3n 2P L P H = 3 4 2 4 2 =21-12 解F =3n 2P L P H =3 3 2 3 0=32- 1 试根据题2-1 图所标注的尺寸判断下列铰链四杆机构是曲柄摇杆机构、双曲柄机构还是双摇杆机构。
题2-1 图答: a )40 110 150 70 90 160,且最短杆为机架,因此是双曲柄机构。
b )45 120 165 100 70 170,且最短杆的邻边为机架,因此是曲柄摇杆机构。
c )60 100 160 70 62 132 ,不满足杆长条件,因此是双摇杆机构。
d )50 100 150 100 90 190 ,且最短杆的对边为机架,因此是双摇杆机构。
2- 3 画出题2-3 图所示个机构的传动角和压力角。
图中标注箭头的构件为原动件。
2- 5 设计一脚踏轧棉机的曲柄摇杆机构,如题2-5 图所示,要求踏板CD 在水平位置上下各摆10 度,且l CD 500mm ,l AD 1000mm 。
(1)试用图解法求曲柄AB 和连杆BC 的长度;(2)用式(2-6)和式(2-6)'计算此机构的最小传动角。
题 2-5 图 解 : ( 1 )由题意踏板 CD 在水平位置上下摆动 10 ,就是曲柄摇杆机构中摇杆的极限位 置,此时曲柄与连杆处于两次共线位置。
《机械设计基础》答案
《机械设计基础》作业答案第一章平面机构的自由度和速度分析1-11-21-31-41-6自由度为11)01122(93')'2(3=--+⨯-⨯=--+-=FPPPnFHL 或:11 22241112832 3=--=-⨯-⨯=--=HLPPnF1-10自由度为:11 28301)221142(103')'2(3=--=--⨯+⨯-⨯=--+-=FPPPnFHL 或:122427211229323=--=⨯-⨯-⨯=--=H L P P n F1-1122424323=-⨯-⨯=--=H L P P n F 1-13:求出题1-13图导杆机构的全部瞬心和构件1、3的角速度比。
1334313141P P P P ⨯=⨯ωω 141314133431==P P P P ωω1-14:求出题1-14图正切机构的全部瞬心。
设s rad /101=ω,求构件3的速度3v 。
s mm P P v v P /20002001013141133=⨯===ω1-15:题1-15图所示为摩擦行星传动机构,设行星轮2与构件1、4保持纯滚动接触,试用瞬心法求轮1与轮2的角速度比21/ωω。
构件1、2的瞬心为P 12P 24、P 14分别为构件2与构件1相对于机架的绝对瞬心1224212141P P P P ⨯=⨯ωω 1212141224212r r P P P P ==ωω第二章 平面连杆机构2-1 试根据题2-1图所注明的尺寸判断下列铰链四杆机构是曲柄摇杆机构、双曲柄机构还是双摇杆机构。
(1)双曲柄机构(2)曲柄摇杆机构(3)双摇杆机构(4)双摇杆机构2-3 画出题2-3图所示各机构的传动角和压力角。
图中标注箭头的构件为原动件。
2-4 已知某曲柄摇杆机构的曲柄匀速转动,极位夹角θ为300,摇杆工作行程需时7s 。
试问:(1)摇杆空回程需时几秒?(2)曲柄每分钟转数是多少? 解:(1)根据题已知条件可得:工作行程曲柄的转角01210=ϕ 则空回程曲柄的转角02150=ϕ摇杆工作行程用时7s ,则可得到空回程需时:s t 5)7/210(15002== (2)由前计算可知,曲柄每转一周需时12s ,则曲柄每分钟的转数为r n 51260==2-7 设计一曲柄滑块机构,如题2-7图所示。