系统辨识总结
系统辨识读书报告

系统辨识的读书报告经过对系统辨识半个学期的课上学习和课下的论文查阅,我已经对系统辨识有了一定的认识和了解。
它是伴随着现代控制理论的产生而发展起来的一门独立的学科,系统辨识(System Identification)就是假设系统输入U(t)和输出Y(t)已知,求系统的传递函数G(s),即通过采集系统的输入输出数据来研究确定系统数学模型的理论和方法。
系统辨识有很多用途,在现代社会中也变得越来越重要。
凡是需要通过实验数据确定数学模型和估计参数的场合都要利用辨识技术,辨识技术现在已经推广到工程和非工程的许多领域,如化学化工过程、核反应堆、电力系统、航空航天飞行器、生物医学系统、社会经济系统、环境系统、生态系统等。
在预测方面,系统辨识的目的是用系统的可测量的输入和输出去预测系统输出的未来的演变。
例如最常见的气象预报,洪水预报,其他如太阳黑子预报,市场价格的预测,河流污染物含量的预测等。
而在控制领域,系统辨识是利用描述控制系统动态特性的数学模型设计控制器,来更好的对系统进行控制。
系统辨识的核心就是采集系统的输入输出数据来研究确定系统数学模型,由于建立数学描述的目的是要帮助分析和解决实际问题,认识客观世界,因此,所构建的模型最终要应用到现实世界中去,也就是说,作为被控对象进行控制,抽象出的模型必须能够代表原系统。
建立研究对象的数学模型主要有两条途径。
第一条途径是利用人们已有的关于对象的知识(如利用物理规律、能量和质量守恒方程及系统部件之间的关系等),通过对对象自身运动机理的分析确定研究对象的数学结构和参数,从理论上推导出对象的数学模型,得到的模型称为理论模型。
由于客观世界运动关系的复杂和人类认识水平的局限,理论模型的建立特别是对复杂对象来说是非常困难的,一般都需要大量简化条件和假设,而且这类模型的数学求解过程异常复杂,难以理解,甚至不可获得,更难以指导实践和在实际工程中推广应用。
建立数学模型的第二条途径源于现代系统理论的发展与应用,它是根据对一个已经存在的对象或系统的观察、测量所得到的大量的输入、输出数据,推断出被研究对象的数学模型,这就是系统辨识过程,得到的数学模型称为经验模型。
系统辨识算法
系统辨识算法一、引言系统辨识是指通过对系统输入输出数据进行观测和分析,从而建立数学模型以描述和预测系统行为的过程。
系统辨识算法是在给定输入输出数据的基础上,利用数学方法和计算机模拟技术,对系统的结构和参数进行估计和辨识的算法。
系统辨识算法在控制工程、信号处理、机器学习等领域具有广泛的应用。
二、系统辨识方法系统辨识方法可以分为参数辨识和非参数辨识两类。
1. 参数辨识参数辨识是指通过对系统模型中的参数进行估计,来描述和预测系统的行为。
常用的参数辨识方法有最小二乘法、最大似然估计法、递推最小二乘法等。
最小二乘法是一种基于最小化误差平方和的优化方法,通过优化目标函数来估计参数值。
最大似然估计法是一种基于概率统计理论的方法,通过似然函数最大化来估计参数值。
递推最小二乘法是一种基于递推迭代的方法,通过更新参数估计值来逼近真实参数值。
2. 非参数辨识非参数辨识是指通过对系统的输入输出数据进行分析,来估计系统的结构和参数。
常用的非参数辨识方法有频域分析法、时域分析法、小波分析法等。
频域分析法是一种基于信号频谱特性的方法,通过对输入输出信号的频谱进行分析,来估计系统的频率响应。
时域分析法是一种基于信号时域特性的方法,通过对输入输出信号的时序关系进行分析,来估计系统的时域特性。
小波分析法是一种基于小波变换的方法,通过对输入输出信号的小波变换系数进行分析,来估计系统的时频特性。
三、系统辨识应用系统辨识算法在实际工程中有着广泛的应用。
1. 控制工程系统辨识算法在控制系统设计中起到关键作用。
通过对控制对象进行辨识,可以建立准确的数学模型,从而设计出性能优良的控制器。
例如,在自适应控制中,可以利用系统辨识算法来实时辨识系统模型,从而根据实际系统特性调整控制器参数。
2. 信号处理系统辨识算法在信号处理领域有重要应用。
通过对信号进行辨识,可以提取信号的特征和结构,从而实现信号去噪、信号分析、信号识别等目标。
例如,在语音信号处理中,可以利用系统辨识算法来建立语音模型,进而实现语音识别和语音合成。
系统辨识实验报告
i=1:800; figure(1) plot(i,Theta(1,:),i,Theta(2,:),i,Theta(3,:),i,Theta(4,:),i,Theta(5,:),i,T title('待估参数过渡过程') figure(2) plot(i,Pstore(1,:),i,Pstore(2,:),i,Pstore(3,:),i,Pstore(4,:),i,Pstore(5,: title('估计方差变化过程')
最小二乘法建模:
二、三次实验 本次实验要完成的内容: 1.参照index2,设计对象,从workspace空间获取数据,取二阶,三阶 对象实现最小二乘法的一次完成算法和最小二乘法的递推算法(LS and RLS); 2.对设计好的对象,在时间为200-300之间,设计一个阶跃扰动,用最 小二乘法和带遗忘因子的最小二乘法实现,对这两种算法的特点进行说 明; 实验内容结果与程序代码: 利用LS和RLS得到的二阶,三阶参数 算法 阶次 A1 A2 A3 B0 B1 B2 B3 LS 二阶 -0.78420.1373 -0.00360.5668 0.3157 RLS 二阶 -0.78240.1373 -0.00360.5668 0.3157 LS 三阶 -0.4381-0.12280.0407 -0.00780.5652 0.5106 0.1160
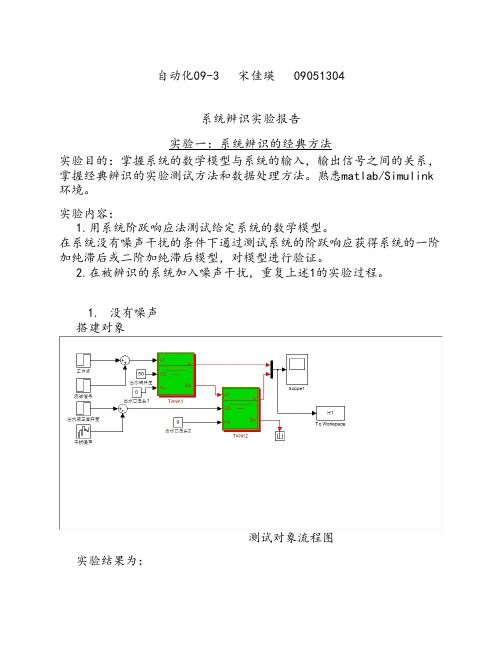
测试对象流程图 实验结果为:
2、加入噪声干扰 搭建对象
实验结果:
加入噪声干扰之后水箱输出不平稳,有波动。
实验二:相关分析法 搭建对象:
处理程序: for i=1:15 m(i,:)=UY(32-i:46-i,1);
end y=UY(31:45,2); gg=ones(15)+eye(15); g=1/(25*16*2)*gg*m*y; plot(g); hold on; stem(g); 实验结果: 相关分析法
系统辩识基础知识点
系统辨识根底复习资料知识点汇总:1.所谓系统,按通常的意义去理解,就是按某种相互依赖关系联系在一起的客体的集合。
2.所谓系统辨识,利用对未知系统的试验数据或在线运行数据〔输入/输出数据〕以及原理和原则建立系统的〔数学〕模型的科学。
3.系统辨识的步骤:〔1〕先验知识和建模目的的依据;〔2〕实验设计;〔3〕结构辨识;〔4〕参数估量;〔5〕模型适用性检验。
4.系统的数学模型,描述系统输入与输出之间数量关系的数学表达式称为系统的数学模型。
5. 目前最流行的操纵系统辅助工具是Matlab。
6.机理分析和系统辨识相结合建模方法也称为“灰箱问题〞。
7.机理建模这种建模方法也称为“白箱问题〞。
8.频谱覆盖宽、能量均匀分布是白噪声信号的特点。
9.最小二乘法辨识方法不属于系统辨识的经典方法。
10.关于多阶最小二乘法,描述错误的选项是计算简单,计算量小,只用五步根本的最小二乘法可获得较好的结果。
11.渐消记忆法是指对旧数据加上遗忘因子,按指数加权来使得旧数据的作用衰减。
12.脉冲响应数学模型属于非参数型。
13.检验模型的标准是模型的实际效果,检验应从不同的侧面检验其可靠性。
14.与周期测试信号相比,阶跃响应法不能够比拟精确地反映对象的动态特性。
15.闭环系统前向通道的阶次不是可辨识的。
16.使辨识系统可被辨识的X要求是辨识时间内系统的动态必须被输入信号延续鼓励。
17.观测数据内容不属于系统辨识的根本内容。
18.输入数据不属于系统辨识过程中的3大要素。
19.棕箱不属于按提供的实验信息分类的建模方法。
20.数学建模不属于现代操纵论的三大支柱。
21.不属于传递函数辨识的时域方法的是时间图索法。
22.关于递推算法收敛性的结论错误的选项是递推辅助变量法收敛于非真值。
23.设A为n×n矩阵,B为n×m矩阵,C为m×n矩阵,并且A,A+BC和I+CA-1B 都是非奇异矩阵,则以下等式横成立的是A+BC-1=A-1-A-1BI+CA-1B]-1CA-1。
第02讲系统辨识三要素

第02讲系统辨识三要素系统辨识是指通过对系统输入和输出数据的观测和分析,求解出系统的数学模型的过程。
系统辨识主要有两种方法:非参数辨识和参数辨识。
在进行参数辨识时,需要确定三个基本要素,分别是模型结构、参数估计方法和误差分析方法。
本文将详细介绍这三个要素。
首先,模型结构是系统辨识的核心要素之一、模型结构决定了辨识出的数学模型与实际系统之间的对应关系。
模型结构的选择需要根据实际问题和已有的知识和经验来确定。
常用的模型结构包括线性模型、非线性模型、时变模型等。
例如,对于一个物理系统来说,可以尝试使用一阶惯性环节、二阶惯性环节等常见的线性模型结构进行辨识;对于一个生物系统来说,可以采用Lotka-Volterra模型等非线性模型结构进行辨识。
选择合适的模型结构可以提高系统辨识的精度和可靠性。
其次,参数估计方法是指在给定模型结构的情况下,通过对系统输入和输出数据进行处理和分析,求解出模型参数的过程。
参数估计方法分为两类:最小二乘法和最大似然法。
最小二乘法通过最小化观测数据与模型预测数据之间的残差平方和来估计模型参数;最大似然法通过最大化观测数据的似然函数来估计模型参数。
当观测数据服从高斯分布时,最小二乘法和最大似然法等效。
参数估计方法的选择需要根据数据性质和实际问题来确定。
对于小样本数据,最大似然法常常具有更好的效果;对于大样本数据,最小二乘法通常是更好的选择。
最后,误差分析方法是指用来评估辨识结果的准确性和可信度的方法。
误差分析方法主要包括残差分析、模型检验和辨识结果评价等。
残差分析是通过分析辨识结果与观测数据之间的差异来评估模型拟合程度的方法。
模型检验是通过将辨识结果应用到实际应用中,观察其预测能力和鲁棒性来评价模型的有效性。
辨识结果评价是通过计算模型的性能指标,如均方误差、决定系数等来评估辨识结果的准确性和可靠性。
误差分析方法的选择需要根据实际问题和辨识结果的要求来确定。
对于较为简单的问题,可以选择较为简单的误差分析方法;对于复杂的问题,需要选择更为精确和全面的误差分析方法。
机械系统动力学系统辨识方法综述

机械系统动力学系统辨识方法综述在机械工程领域,对机械系统动力学特性的准确了解是优化设计、故障诊断、性能预测和控制策略制定的关键。
机械系统动力学系统辨识作为获取系统动态特性的重要手段,一直以来都是研究的热点。
本文将对常见的机械系统动力学系统辨识方法进行综述。
机械系统动力学系统辨识的基本任务是根据系统的输入和输出数据,建立能够准确描述系统动态特性的数学模型。
常见的辨识方法可以大致分为基于时域的方法和基于频域的方法。
时域辨识方法中,脉冲响应函数法是一种常用的技术。
它通过对系统施加一个短脉冲输入,并测量系统的输出响应,从而得到系统的脉冲响应函数。
脉冲响应函数直接反映了系统的动态特性,通过对其进行分析和处理,可以得到系统的数学模型参数。
最小二乘法在时域辨识中也应用广泛。
它基于输入输出数据,通过最小化误差的平方和来估计模型参数。
这种方法计算相对简单,并且在一定条件下具有较好的估计精度。
然而,它对噪声比较敏感,当测量数据中存在噪声时,可能会导致辨识结果的偏差。
卡尔曼滤波法是一种基于状态空间模型的时域辨识方法。
它能够在存在测量噪声和系统不确定性的情况下,对系统状态进行最优估计,并同时估计模型参数。
这种方法在处理多变量系统和时变系统时具有优势。
在频域辨识方法中,频率响应函数法是基础且重要的手段。
通过对系统施加不同频率的正弦输入,并测量系统的稳态输出响应,可以得到系统的频率响应函数。
频率响应函数包含了系统在不同频率下的幅频和相频特性,通过对其进行拟合和分析,可以获得系统的模型参数。
谐波平衡法常用于非线性系统的频域辨识。
它假设系统的响应可以表示为多个谐波的叠加,通过求解非线性方程来确定谐波的系数,从而得到系统的模型。
相干函数分析则用于评估输入和输出之间的线性相关性,帮助判断辨识结果的可靠性。
除了上述传统的辨识方法,近年来还发展出了一些新的技术和方法。
例如,基于神经网络的辨识方法利用神经网络强大的非线性拟合能力,能够处理复杂的非线性机械系统。
系统辨识(No.1)

5.
确定离线辨识还是在线辨识 离线辨识是在所有实验数据采集完了之后才计算 结果。但在基于辨识的自适应控制系统中,辨识必须 是在线的。
第二步:选择模型结构(模型结构辨识)
模型结构M是参数空间的一个连通开子集DM 到 模型类M*的一个可微映射。
M :R
* 5
M
*
b1 s b 0 M G s : G s 2 a 2 s a1 s a 0 D M p : p a 0 , a 1 , a 2 , b1 , b 2
第三步:参数估计 第四步:模型验证
输入信号u(k)作用下,模型和实物输出比较。 检验残差
系统辨识框图
辨识目的与 验前知识 辨识方案选择
被辨识系统的输 入输出观测信息 结构参数与模 型参数的确定
模型验证
不满足
最终模型
第二章 经典辨识方法
一.经典辨识方法原则上适应任意复杂的过程
二. 对过程施加特定的实验信号,同时测定过程的输出, 可以求得实际过程的非参数模型。
4.
渊源
根轨迹法和频率域法为代表的经典控制理论已不能胜 任将控制技术提到更高的水平的要求。 状态空间法、动态规划以及极大值原理为代表的现代 控制理论发展的需要。 数字计算机的广泛使用,为辨识系统所需进行的计算 提供了有效的工具,使辨识算法的实现成为可能。 系统工程主要是用定量方法来研究大系统的一门学科, 其基础工作也是建立数学模型。 生物计量学以及经济计量学等都要用到系统辨识技术。 它们有一套自己的辨识和估计的模式。 信息理论中很重要的一个内容是滤波,滤波的前提也 需要先构成模型。 在许多科学和工程领域内,能否定量分析和建立所研 究问题的数学模型,已成为衡量该领域认识水平的一 个尺度。
系统辨识

3.系统辨识
建模的方法:
机理建模:依据系统工作所服从的物理、化
学、生物的定理、定律,以及系统的结构数 据推导出数学模型。 -白箱建模 机理模型、解析模型。 系统辨识:通过观测实际系统的输入、输出 数据,从一类数学模型中选择一个特定的数 学模型,该模型在数学上等价于相应的实际 系统。 -黑箱建模 两者相结合,用机理分析确定模型结构,用 系统辨识方法确定模型参数。 -灰箱建模
系统辨识
吴刚
中国科学技术大学工业自动化研究所
2010年11月21日
引论
第一节 定义与分类
1.系统(system)
一般定义: 由相互联系、相互制约、相互作
用的各个部分组成的,具有一定整体功能和 综合行为的统一体。 工程系统中:由相互联系的元部件组成的具 有某种特定功能的整体。 如:晶体管、放大器、电机 伺服系统、调节器、惯性导航平台 磨煤机、水处理、锅炉、发电机 生产线、电网、互联网 企业、联合企业、经济协作区、国民经 济系统
7.先验知识
对模型结构、参数、数据的实际知识或信息
对实际系统的数学假定
主导时间常数
系统时延 系统通频带 系统非线性与时变特性 输入/输出信号变化幅值
噪声水平
8.参数估计的方法
离线辨识 在线辨识(实时辨识) 最小二乘法 极大似然法 辅助变量法 随机逼近法 互相关法
n
向后一步平移算子:
q X t X t 1 yt ai q yt bi q ut
i i i 1 i 1 n n
1
A(q ) yt B(q )ut 1 A(q ) 1 ai q 1 a1q an q
1 i 1 i 1 n n
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一. 传递函数辨识的时域法: 1.()1sKeGsTs , 在S型曲线的速率变化最快处做一切线, 分别与时间轴t及阶跃响应渐近线()y 相交于(0,)和0(,())ty (1) ()()11yyyKuue (2) 0Tt 或: 2121121212ln(1)ln(1)ln(1)ln(1)ln(1)ln(1)tttytyTyyyy
2. 1212(),()(1)(1)sKeGsTTTsTs ()(0)yyKu
可以根据阶跃响应曲线脱离起始的毫无反应的阶段到开始变化的时刻来确定.
12121221*()1ttTTTTyteeTTTT
取两个点的数据0.4,*(0.4),0.8,*(0.8)yy
12212121212
()/2.16/()1.74/0.55TTttTTTTtt
二. 线性系统的开环传递函数辨识
设开环输入信号为:()sin()dmytAt 输出:cos()sin()sincossinfffAytAtttA
在时间域上取: 0,,2,,thhnh (0),(),,()TYyyhynh sin(0)sin()sin()cos(0)cos()cos()Thnhhnh
12cossinttcAcA
根据最小二乘原理: 112221221ˆˆˆˆarctanˆˆTTfccYAcccc 开环系统相频和幅频为: 221221ˆˆˆarctan20lgˆemcccMcA 三. 1.根据脉冲响应()gt求脉冲传递函数1()Gz 1112111()(1)(2)()1nknnnbzbzGzgzgzgkzazaz
(1)(2)()(2)(3)(1)()(1)(21)gggngggnHgngngn12(1)(1)(2)(2)(2)()gnggngGGgngn
1111nnaaHGa
112212110001001nnnbabGaaab
四. 相关分析法: 一个具有脉冲响应函数为()gt的系统,如果其输入量是信号()ut的自相关函数()uuR,则其响应就等
于输入信号()ut与相应的输出信号()yt之间的互相关函数()uyR 当被辨识系统输入为白噪声(一种均值为0, 谱密度为非零常数的平稳随机过程)时, 只要确定输入与输出信号间的互相关函数, 即可求出被辨识系统的脉冲响应函数()g, 因为白噪声的自相关函数是
一个函数, 即2()()uuR 又: 2()()uyRg 则:
21()()uygR 其中0()()()uyuuRgRd
要求: (1)持续激励 (2)最优输入信号
M序列的性质: (1) 一个n级移位寄存器产生的M序列周期为长度是: 21nN
(2) 2211()/(1)xxNaNRaNN 周期的偶函数 M序列的周期要大于被辨识系统的过渡时间. M序列辨识过程:
22
0
101()ˆ()()/ˆ(0)2()/()()()TxyxyNxyiNaSaCgdNNgiRiCSgRiCSaRsignxiyiN
五. 极大释然估计流程: 设置初始值:000ˆ,,P 构造初始向量 (1)h, 令(1)(1)fhh 计算()k 计算 ˆ(),(),()KkPkk
是否满足停止条件 输出ˆk, 停机
采集数据,构造()hk Y
N
计算(),(),()fffykukk, 构造()fhk 1kk
1111ˆˆˆˆNNNNNNrK1(1)1(1)(1)NfNTfNfPhNKhNPhN
1(1)(1)1(1)(1)TNffNNNTfNfPhNhNPPPhNPhN
1ˆˆ(1)(1)TNNyNhN六. 最小二乘: 11()()()()nniiiizkaykibukivk
定义: ()(1),(2),,(),(1),(2),,()hkykykyknukukukn 1212,,,,,,,Tnnaaabbb 则:
()()()zkhkvk 1. 一般最小二乘:
令: (1)(1)(0)(1)(0)(1)(2)(2)(1)(2)(1)(2)()()(1)()(1)()mmzhyynuunzhyynuunZHzmhmymymnumumn 1ˆTTmmmmHHHZ
ˆ
0E
(无偏估计)
均方误差: 11TTTTmmmmmmEHHHRHHH
例:1210104zrZHRzr 1121ˆ2TTHHHZzz
1154TTTTrEHHHRHHH
2. 加权最小二乘: (1),(2),,()mWwwwm
1ˆTTmmmmmmHWHHWZ
ˆ
0E
(无偏估计)
均方误差: 11TTTTmmmmmmmmmmEHWHHWRWHHWH 如果 1mWR 则: 111ˆTTmmmmHRHHRZ 例: 用两台仪器对位置标量各测量一次, 量测量分别为12,zz, 仪器的测量误差均值为0, 方差分别为,4rr的随机量, 求其最小二乘估计, 并计算估计的均方误差. 解: 采用加权最小二乘估计, 权阵1mWR, 并计算估计的均方误差. 由题意得量测方程: ZHV 11241ˆ55TTHWHHWZzz 1145TTTTEHWHHWRWHHWHr
3. 一般最小二乘参数辨识流程图: 七. 模糊系统辨识 1. 模糊系统的设计
设二维模糊系统()gx为集合21122[,][,]UR上的一个函数, 其解析形式未知. 假设
对任意一个xU, 都能得到()gx, 则可设计一个逼近的模糊系统. 步骤: (1)在[,]ii上定义(1,2)iNi个标准的, 一致的, 完备的模糊集12,,,iNiiiAAA (2)组建12MNN条模糊集ifthen规则:12iiuR, 如果1x为11iA且2x为22iA, 则y为12iiB, 其中11221,2,,,1,2,,iNiN 将模糊集12iiB的中心12()iiy选择为: 121212,iiiiygee
(3) 12121212121212121212111211()()()()()NNiiiiAAiiNNiiAAiiyxxfxxx
开始 产生输入信号M序列 产生输出信号()zk 给出样本矩阵,mmHZ 估计参数
分离估计参数,iiab 画图: 输入/输出信号和估计参数 结束 2. 万能逼近定理: 令()fx为二维模糊系统, ()gx为未知函数, 如果()gx在1122[,][,]U上是连续可微的, 则模糊系统的逼近精度为: 1121112max(1,2)ijjiiijNgggfhhheeixx
无穷维范数定义为()sup()xUdxdx jie为第j个模糊集中心点的坐标. 3. 仿真实例: (1) 针对一维函数()gx, 设计一个模糊系统()fx, 使之一致的逼近定义在[3,3]U上的连续
函数()singxx所需精度为0.2, 即sup()()xUgxfx
由于cos()1gxx,ggfhhx,故取0.2h满足精度要求, 取0.2h 则模糊集的个数为: 131LNn 在[3,3]U上定义31个具有三角形隶属函数的模糊集jA.
所设计的模糊系统为: 311311sin()()()()jjAjjAjexfxx (2) 针对二维函数()gx, 设计一个模糊系统()fx, 使之一致的逼近定义在[1,1][1,1]U上的连续函数1212()0.520.10.280.06gxxxxx 所需精度为 0.1
由于21sup0.10.060.16xUgxx, 12sup0.280.060.34xUgxx 取 120.2hh有: 0.160.20.340.20.1gf满足精度要求 由于2L, 此时模糊集的个数为: 111LNn, 即12,xx分别在[1,1]U上定义11个具有三角形隶属函数的模糊集jA
所设计的模糊系统为: 12121212121111121111111211()()()()()iiiiAAiiiiAAiigeexxfxxx