控制系统计算机辅助设计第四章习题15-21

第四章习题 第15题. 程序: clc
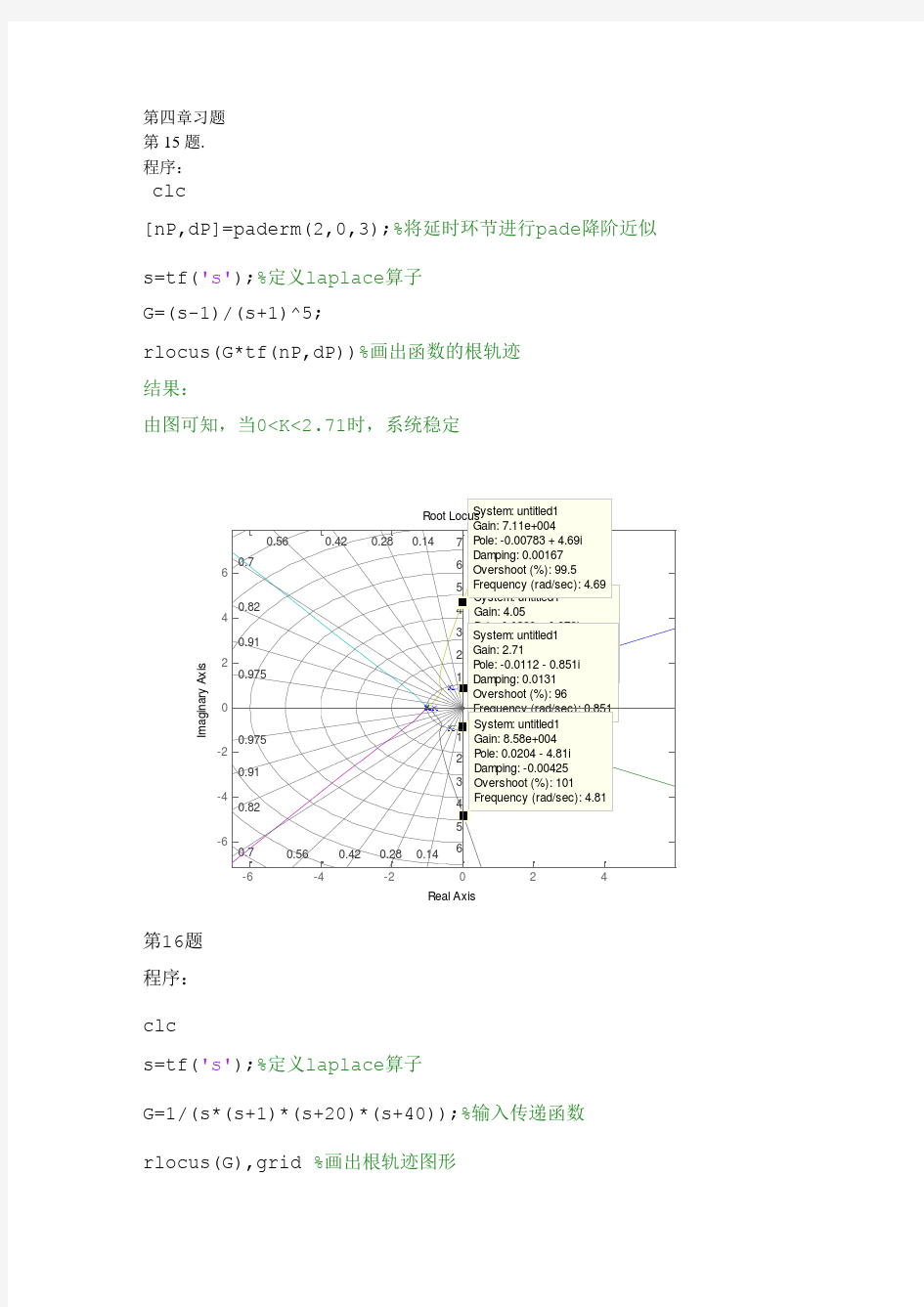
[nP,dP]=paderm(2,0,3);%将延时环节进行pade 降阶近似 s=tf('s');%定义laplace 算子 G=(s-1)/(s+1)^5;
rlocus(G*tf(nP,dP))%画出函数的根轨迹 结果:
由图可知,当0 -6 -4 -2 02 4 -6 -4 -2 02 4 60.28 0.420.56 0.7 0.820.91 0.975 0.14 0.280.42 0.56 0.70.82 0.910.97512345671234 5 67System: untitled1Gain: 4.05 P ole: 0.0389 + 0.872i Damping: -0.0445Overshoot (%): 115Frequency (rad/sec): 0.873System: untitled1 Gain: 2.71P ole: -0.0112 - 0.851i Damping: 0.0131Overshoot (%): 96 Frequency (rad/sec): 0.851System: untitled1Gain: 8.58e+004P ole: 0.0204 - 4.81i Damping: -0.00425Overshoot (%): 101 Frequency (rad/sec): 4.81System: untitled1Gain: 7.11e+004 P ole: -0.00783 + 4.69i Damping: 0.00167Overshoot (%): 99.5 Frequency (rad/sec): 4.69 0.14Root Locus Real Axis I m a g i n a r y A x i s 第16题 程序: clc s=tf('s');%定义laplace 算子 G=1/(s*(s+1)*(s+20)*(s+40));%输入传递函数 rlocus(G),grid %画出根轨迹图形 结果: 如图所示:能使闭环主导极点在阻尼大约为0.707时,K=367 Root Locus Real Axis I m a g i n a r y A x i s -2.5 -2 -1.5 -1 -0.50 0.5 1 1.5 -2.5 -2-1.5-1-0.50 0.511.5 20.64 0.760.86 0.940.985 0.160.340.50.640.760.86 0.940.9850.5 11.522.5System: G Gain: 367 P ole: -0.481 + 0.476i Damping: 0.711 Overshoot (%): 4.17 Frequency (rad/sec): 0.676 0.16 0.34 0.5 第17题 程序: clc z=tf('z');%定义z 算子 H=1/((z+0.8)*(z-0.8)*(z-0.99)*(z-0.368));%输入H 函数 rlocus(H);%画出函数的根轨迹 K=0.223;%增益K step(feedback(H*K,1))%画出增益K=0.223时的系统阶跃响应曲线 结果: 如图所示,可以看出,当0 -5 -4-3-2-1012345 -5-4-3-2-1012 345System: H Gain: 0.223P ole: 0.0118Damping: Overshoot (%): Frequency (rad/sec): Root Locus Real Axis I m a g i n a r y A x i s 取K=0.223,画出阶跃响应曲线如下: 020406080100120140160 -1 -0.5 0.5 1 1.5 2 x 10 6 Step Response Time (sec) A m p l i t u d e 第18题 程序: clc z=tf('z',0.1);%定义z 算子 H1=1/((z+0.8)*(z-0.8)*(z-0.99)*(z-0.368));%输入H 函数 H=d2c(H1); H2=z^(-8); [n,d]=paderm(8,0,3); Q=tf(n,d); R=H*Q; rlocus(R);%画出函数的根轨迹 step(feedback(G*0.01,1)) 运行结果: -6 -4 -2 02 4 6 -6-4 -2 2 4 System: R Gain: 0.0119 P ole: 0.0444 + 0.236i Damping: -0.185Overshoot (%): 181 Frequency (rad/sec): 0.24 Root Locus Real Axis I m a g i n a r y A x i s 0102030405060 -2 -1.5-1-0.500.51 1.52 2.5x 10 5 Step Response Time (sec) A m p l i t u d e 19题 程序: clc s=tf('s'); G=(s^2*(s^2+3*s+4.32))/(s^5+3*s^4+4.63*s^3+1.23*s^2+1.629*s+1.638); rlocus(G) figure step(feedback(G*2.68,1)) 运行结果:从图上时看出K=2.68时系统稳定 -3 -2.5-2-1.5 -1-0.500.5 -2-1.5 -1 -0.5 0.5 1 1.5 2 System: G Gain: 2.68 P ole: 0.00299 + 0.368i Damping: -0.00814Overshoot (%): 103Frequency (rad/sec): 0.368System: G Gain: 2.68 P ole: 0.00299 - 0.368i Damping: -0.00814Overshoot (%): 103 Frequency (rad/sec): 0.368 Root Locus Real Axis I m a g i n a r y A x i s 0500100015002000250030003500400045005000 -2 -1.5 -1 -0.5 0.5 1 1.5 2 x 10 6 Step Response Time (sec) A m p l i t u d e 第20题 (1) 程序: clc s=tf('s');%定义laplace 算子 G=8*(s+1)/(s^2*(s+5)*(s^2+6*s+10));%输入开环传递函数模型 bode(G)%画出bode 图 figure; nyquist(G),grid %画出nyquist 图 figure; nichols(G)%画出nichols 图 [Gm,r,wcg,wcp]=margin(G),grid %求系统的幅值裕度和相位裕度 Step(feedback(G,1)) 运行结果: Gm =4.8750 r =3.5676 wcg =1.0000 wcp =0.4125 Gm>1,r>0 所以系统稳定 -150-100 -50 50 M a g n i t u d e (d B )10 -1 10 10 1 10 2 -360 -315-270-225-180 -135P h a s e (d e g ) Bode Diagram Frequency (rad/sec) -8 -7-6-5-4-3-2-101 -0.25 -0.2-0.15-0.1-0.0500.050.1 0.150.20.25 0 dB -20 dB -10 dB -6 dB -4 dB -2 dB 20 dB 10 dB 6 dB 4 dB 2 dB Nyquist Diagram Real Axis I m a g i n a r y A x i s -360 -315 -270 -225 -180 -135 -90 -45 -160-140-120-100-80-60-40-20 02040 6 dB 3 dB 1 dB 0.5 dB 0.25 dB 0 dB -1 dB -3 dB -6 dB -12 dB -20 dB -40 dB -60 dB -80 dB -100 dB -120 dB -140 dB -160 dB Nichols Chart Open-Loop P hase (deg) O p e n -L o o p G a i n (d B ) 050100150200250300350400 0.20.40.60.811.2 1.41.61.8 2Step Response Time (sec) A m p l i t u d e (2) 程序: clc s=tf('s');%定义laplace 算子 G=(4*(s/3+1))/(s*(0.02*s+1)*(0.05*s+1)*(0.1*s+1));%输入开环传递函数模型 bode(G)%画出bode 图 figure; nyquist(G),% figure nichols(G) [Gm,r,wcg,wcp]=margin(G),grid Step(feedback(G,1)) 运行结果: Gm =8.1405 r =88.8362 wcg =38.4943 wcp =8.2231 -100-50 50 M a g n i t u d e (d B )10 -1 10 10 1 10 2 10 3 -270 -225-180-135-90 -45P h a s e (d e g ) Bode Diagram Frequency (rad/sec) -1 -0.8-0.6-0.4-0.200.20.40.60.8 -15-10 -5 5 10 15 Nyquist Diagram Real Axis I m a g i n a r y A x i s 00.51 1.52 2.5 0.10.20.30.40.50.6 0.70.80.9 1Step Response Time (sec) A m p l i t u d e (3) 程序:clc A=[0 2 1;-3 -2 0;1 3 4]; B=[4;3;2]; C=[1 2 3]; D=[]; G=ss(A,B,C,D); G1=tf(G); bode(G1);%画出bode 图 figure; nyquist(G);%画出nyquist 图 figure; nichols(G);%画出nichols 图 [Gm,r,wcg,wcp]=margin(G)%求系统的幅值裕度和相位裕度 Step(feedback(G,1)) 运行结果: -20-10 10 20 M a g n i t u d e (d B )10 -2 10 -1 10 10 1 10 2 -180 -135-90-450P h a s e (d e g ) Bode Diagram Frequency (rad/sec) -1 -0.500.51 1.52 -5-4-3-2-1012 345Nyquist Diagram Real Axis I m a g i n a r y A x i s -180 -135-90 -450 -20-15 -10 -5 5 10 15 Nichols Chart Open-Loop P hase (deg) O p e n -L o o p G a i n (d B ) 024******** 1618 123456 789x 10 6 Step Response Time (sec) A m p l i t u d e (4) 程序: clc z=tf('z',0.1); H=(0.45*(z+1.31)*(z+0.054)*(z-0.957))/z*(z-1)*(z-0.368)*(z-0.99); bode(H)%画出bode 图 figure; nyquist(H)%画出nyquist 图 figure; nichols(H)%画出nichols 图 [Gm,r,wcg,wcp]=margin(H),grid %求系统的幅值裕度和相位裕度 figure Step(feedback(G,1)) Gm = 0.4904 r = -62.7190 wcg =15.2109 wcp = 11.3909 系统不稳定 -150-100 -50 50 M a g n i t u d e (d B )10 -2 10 -1 10 10 1 10 2 180360540720900P h a s e (d e g ) Bode Diagram Frequency (rad/sec) -3 -2-10123 -4-3 -2 -1 1 2 3 4 Nyquist Diagram Real Axis I m a g i n a r y A x i s 090180270360450540630720810900 -160 -140-120-100-80-60-40-20 02040 6 dB 3 dB 1 dB 0.5 dB 0.25 dB 0 dB -1 dB -3 dB -6 dB -12 dB -20 dB -40 dB -60 dB -80 dB -100 dB -120 dB -140 dB -160 dB Nichols Chart Open-Loop P hase (deg) O p e n -L o o p G a i n (d B ) 024681012141618 123456 789x 10 6 Step Response Time (sec) A m p l i t u d e (5) clc s=tf('s'); G=(6*(-s+4))/s^2*(0.5*s+1)*(0.1*s+1); bode(G)%画出bode 图 figure; nyquist(G)%画出nyquist 图 figure; nichols(G)%画出nichols 图 [Gm,r,wcg,wcp]=margin(G)%求系统的幅值裕度和相位裕度 figure Step(feedback(G,1)) 程序: Gm = 0 r = Inf wcg = 0 wcp =NaN 系统不稳定 102030405060 70M a g n i t u d e (d B )10 -1 10 10 1 10 2 10 3 180 225 270 P h a s e (d e g ) Bode Diagram Frequency (rad/sec) 180 210 240270 1020 30 40 50 60 70 80 Nichols Chart Open-Loop P hase (deg) O p e n -L o o p G a i n (d B ) -1000 -900-800-700-600-500-400-300-200-1000 -60-40 -20 20 40 60 Nyquist Diagram Real Axis I m a g i n a r y A x i s 00.51 1.5 2 2.5 3 3.5 0.5 1 1.5 2 2.5 3 3.5 x 10 6 Step Response Time (sec) A m p l i t u d e (6) 程序: clc G=(-10*s^3-60*s^2+110*s+60)/(s^4+17*s^3+82*s^2+130*s+100); bode(G)%画出bode 图 figure; nyquist(G)%画出nyquist 图 figure; nichols(G)%画出nichols 图 [Gm,r,wcg,wcp]=margin(G)%求系统的幅值裕度和相位裕度 figure Step(feedback(G,1)) Gm =0.8392 r = -18.6130 wcg = 5.0824 wcp =7.0277 系统不稳定、 -40-30-20-100 10M a g n i t u d e (d B )10 -2 10 -1 10 10 1 10 2 10 3 90 180270360450P h a s e (d e g ) Bode Diagram Frequency (rad/sec) -1.5 -1-0.500.51 1.5 -2-1.5 -1 -0.5 0.5 1 1.5 2 Nyquist Diagram Real Axis I m a g i n a r y A x i s 90 135180225270315360405 -35-30 -25 -20 -15 -10 -5 5 Nichols Chart Open-Loop P hase (deg) O p e n -L o o p G a i n (d B )