分布式驱动电动汽车操纵稳定性仿真
分布式电驱动车辆动力学状态参数观测及驱动力协调控制
展望未来,我们将继续研究分布式电驱动车辆的动力学状态参数观测及驱动 力协调控制问题,致力于提高车辆的稳定性和操控性。具体的研究方向包括: (1)传感器优化布置:研究如何合理增加传感器数量和类型,以获取更全面的 车辆状态信息;(2)数据采集频率提升:探索更高频率的数据采集方法,以更 好地捕捉车辆动态变化;(3)
结论与展望
本次演示介绍了分布式电驱动车辆动力学状态参数观测和驱动力协调控制的 相关知识,并分析了实验结果及未来研究方向。通过优化传感器布置、数据采集 和预处理方法,我们可以获得较为准确的车辆动力学状态参数观测结果。同时, 驱动力协调控制算法在不同工况下均表现出良好的性能。然而,仍需针对传感器 噪声、数据采集频率和特殊工况等问题进行深入研究。
四、控制策略
针对四轮独立电驱动车辆的特性,本次演示提出了一种基于模型的控制策略。 该策略基于车辆动力学模型和控制模型,根据车辆状态和目标轨迹计算控制输入。 具体策略如下:
1、根据车辆当前状态和目标轨迹,计算出车辆的速度和加速度。 2、根据速度和加速度,利用动力学模型计算出车辆的扭矩需求。
3、利用控制模型计算出电机的 转速和转矩控制输入。
稳定性控制
稳定性控制是分布式电驱动汽车的重要性能指标之一,它直接影响到汽车的 安全性和舒适性。稳定性控制一般包括整车控制器、电动机控制器和轮胎压力监 测系统等方面。
整车控制器是分布式电驱动汽车的“大脑”,它通过对车辆各部位状态信息 的采集和处理,实现车辆的稳定控制。整车控制器一般采用先进的控制算法和策 略,如PID控制、模糊控制等,以保证车辆的稳定性和安全性。
随着电动汽车技术的不断发展,四轮独立电驱动车辆逐渐成为研究热点。这 种车辆具有出色的灵活性和动力学性能,能够实现独立驱动和独立控制。本次演 示将介绍四轮独立电驱动车辆实验平台及其驱动力控制系统的研究。
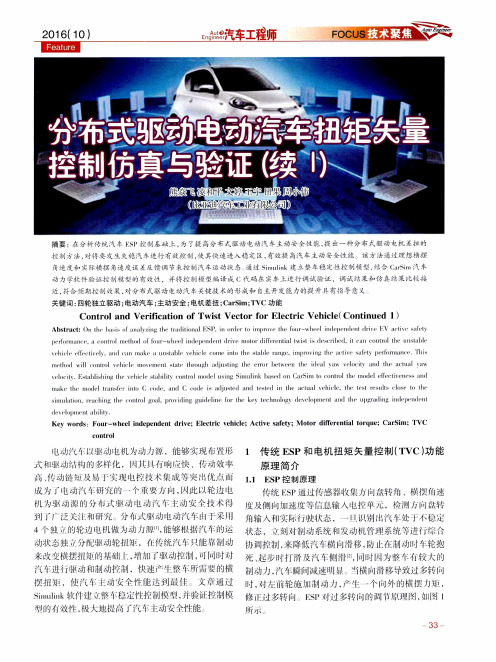
分布式驱动电动汽车扭矩矢量控制仿真与验证(续1)
训J 广泛 父汪 f 【 I 研究
分 动状念独 ຫໍສະໝຸດ 分 乍进 动轮十 f 【 , j , 传统汽年只能 { 州 动 协凋控 制 , 来 降低汽 乍横 …滑移 , 防l 卜 在制 动 l f 1 f 1 轮抱 术改 横摆 扭 矩 的 础 增 J J 【 I J , 动控 制 , _ I f ¨} i l 『 刈 夕 匕 、 起 步 时打 滑 / 艾汽 1 侧 滑 , 时 为 / I / f 较 大 的
怏 述
数 【 】 轮 情 参数
C a r i I l l 参数输入 参数输 入 m , f 、 I 、 迎
利1 - 仿 的 实 [ I l f 为【 J u 轮
『 戈 1 6, J … 1 【 、 V C使 J 俄 , 包_ f 删卡 I ! J
验, 能迎过 3 J ) 动I …1 , J j = f 现} ‘ 1 埘 驶 蹄 / 支。 【 J 等外 部输 入 的 响 J 、 l 殳 1 4爪 … ,包 1 参数 输 入 轮胎 输 入 的 参数 包 : , 1 质 i、 质 心 f j 5 、 l 5 I I 系数 及测 试的轮 胎数 等 1 模, 允 成 ,拨 米就 址 r r V ( : 帧J l f 门 模, f l i 于s i n 1 l l “ l l k干 l 】 C a r S i m J L . i良女 f f 数 f 』 t 通f 。 ’ 接【 1 , 』 夫 I 此 S i mu l i n k 、 F V C卡 I l J
一 一 一 一 一 一 ~ 一 ~ 一 一 ~ ~ 一 ~
一 一 一 一 一 一 ~ ~ 一 一 一 ~ 一 ~
结咐 岫 … - 三州 ~
} 动 汽 1 i 以驱 动 J l ! ? J L 为动 力源 ,能 够 实现 』 驱功结 构的 多样 化 ,I
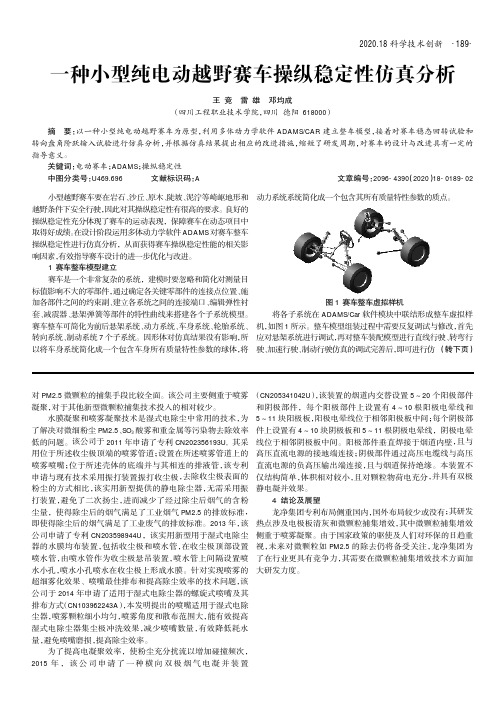
一种小型纯电动越野赛车操纵稳定性仿真分析
2020.18科学技术创新(转下页)对PM2.5微颗粒的捕集手段比较全面。
该公司主要侧重于喷雾凝聚,对于其他新型微颗粒捕集技术投入的相对较少。
水膜凝聚和喷雾凝聚技术是湿式电除尘中常用的技术,为了解决对微细粉尘PM2.5、SO 3酸雾和重金属等污染物去除效率低的问题。
该公司于2011年申请了专利CN202356193U,其采用位于所述收尘极顶端的喷雾管道;设置在所述喷雾管道上的喷雾喷嘴;位于所述壳体的底端并与其相连的排液管,该专利申请与现有技术采用振打装置振打收尘极,去除收尘极表面的粉尘的方式相比,该实用新型提供的静电除尘器,无需采用振打装置,避免了二次扬尘,进而减少了经过除尘后烟气的含粉尘量,使得除尘后的烟气满足了工业烟气PM2.5的排放标准,即使得除尘后的烟气满足了工业废气的排放标准。
2013年,该公司申请了专利CN203598944U ,该实用新型用于湿式电除尘器的水膜均布装置,包括收尘极和喷水管,在收尘极顶部设置喷水管,由喷水管作为收尘极悬吊装置,喷水管上间隔设置喷水小孔,喷水小孔喷水在收尘极上形成水膜。
针对实现喷雾的超细雾化效果、喷嘴最佳排布和提高除尘效率的技术问题,该公司于2014年申请了适用于湿式电除尘器的螺旋式喷嘴及其排布方式(CN103962243A ),本发明提出的喷嘴适用于湿式电除尘器,喷雾颗粒细小均匀,喷雾角度和散布范围大,能有效提高湿式电除尘器集尘极冲洗效果,减少喷嘴数量,有效降低耗水量,避免喷嘴磨损,提高除尘效率。
为了提高电凝聚效率,使粉尘充分扰流以增加碰撞频次,2015年,该公司申请了一种横向双极烟气电凝并装置(CN205341042U ),该装置的烟道内交替设置5~20个阳极部件和阴极部件,每个阳极部件上设置有4~10根阳极电晕线和5~11块阳极板,阳极电晕线位于相邻阳极板中间;每个阴极部件上设置有4~10块阴极板和5~11根阴极电晕线,阴极电晕线位于相邻阴极板中间。
车辆操纵稳定性虚拟仿真及优化

II
上海交通大学 学位论文原创性声明
本人郑重声明:所呈交的学位论文,是本人在导师的指导下,独立进行研究工 作所取得的成果。除文中已经注明引用的内容外,本论文不包含任何其他个人或集体 已经发表或撰写过的作品成果。对本文的研究做出重要贡献的个人和集体,均已在文 中以明确方式标明。本人完全意识到本声明的法律结果由本人承担。
该方法周期长效率低已经不能满足现代汽车开发速度和开发质量的要求因此有必要采用虚拟试验技术在样车试制前对其操稳性能进行预测分析故针对能有效的提高设计质量缩短开发周期提升研发效率降低研发费而进行车辆操纵稳定性虚拟试验方法的研究对于我国汽车设计研发具有重大的指导意义和实践意义
上海交通大学 硕士学位论文 车辆操纵稳定性虚拟仿真及优化 姓名:潘国昌 申请学位级别:硕士 专业:车辆工程 指导教师:黄虎 20090201
仿真研究? Fig.1-3 virtual prototype construction flow chart
1.3
国内外汽车操纵稳定性的研究概况
汽车技术的发展进程表明,车辆操纵性和转向反应问题最早是在 1935 年开始研
究的。此后,于 1946 年确立了车辆操纵性的基本理论。这些研究主要涉及到转向力 学和汽车在动态振动中的特性,后来,大约从 1950 年起,才对车辆受外界脉冲作用 力的反应进行深入的理论研究和分析。第二次世界大战以后,对动态稳定性的研究着 重于创造出一种数学模拟系统。自 1956 年 Segel 成功地建立了一个线性数学模型仿 真计算汽车的转向响应,自此汽车操纵稳定性的仿真研究在世界各国开展十分广泛。 1961 年完成了动态稳定性研究的计算机程序的准备工作,1963 年,这项工作在英国 又得到了进一步的发展。80 年代初,英、美、瑞典、加拿大等国的大学和研究机构 纷纷对农用车、半挂车及大型载货车的操纵性进行了研究。进入 80 年代中后期,对
汽车操纵稳定性的仿真

汽车操纵稳定性的仿真
张代胜;陈朝阳;张树强;韦伟;邹海斌
【期刊名称】《农业机械学报》
【年(卷),期】2005(036)011
【摘要】分析了汽车侧倾引起的左右轮胎垂直载荷的重新分配,以及轮胎侧向力非线性变化对操纵稳定性的影响,并综合考虑汽车转向系和行驶系的结构和性能特性,建立两轴汽车操纵稳定性数学模型.并对用Simulink构建的计算机模型进行仿真,仿真结果与试验结果一致,证实模型具有很好的精度和实用性.分析了车速、转向系刚度、前后轮侧偏刚度比、前后悬架侧倾角刚度比以及侧倾对汽车操纵稳定性的影响.
【总页数】5页(P12-16)
【作者】张代胜;陈朝阳;张树强;韦伟;邹海斌
【作者单位】合肥工业大学;合肥工业大学;合肥工业大学;合肥工业大学;合肥工业大学
【正文语种】中文
【中图分类】U461.6
【相关文献】
1.分布式电动汽车操纵稳定性仿真分析 [J], 肖文文;张缓缓;轩飞虎
2.基于横摆运动控制的轮毂驱动电动汽车操纵稳定性仿真分析 [J], 赵琦;丁琳
3.基于横摆运动控制的轮毂驱动电动汽车操纵稳定性仿真分析 [J], 赵琦;丁琳
4.基于新控制策略的五轴汽车操纵稳定性仿真试验分析 [J], 朱永强;李运洪
5.四轮毂驱动电动汽车操纵稳定性仿真分析 [J], 赵琦;徐礼锋;丁琳
因版权原因,仅展示原文概要,查看原文内容请购买。
四轮独立驱动电动汽车稳定性仿真研究
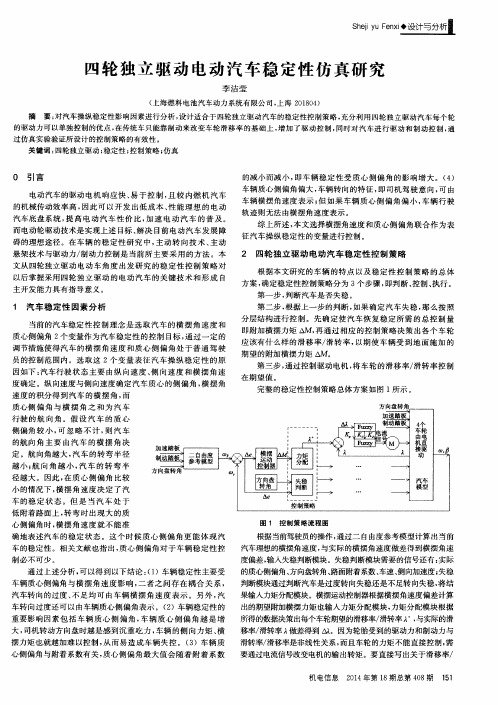
应该有什么样的滑移 率/ 滑转 率 , 以期使 车辆受 到地 面施加 的 期望的附加 横摆力矩 △ f 。 第 三步 , 通过控制驱动电机 , 将 车轮的滑移率/ 滑转率控 制 在 期望值 。 完 整的稳定性控制策略总体方案如图 1 所示 。
制必不可少 。
一
…
网
撼
凸 P
j
I
l ■ …
l
_ . 动
机 接 由 直 驱 电 m , 量
H
控 制策略
= = ■ 汽 模 车 型
图 1 控 制 策 略 流 程 图
根据 当前 驾驶 员 的操 作 , 通 过 二 自由度 参 考模 型计 算 出 当 前 汽 车理想 的横 摆 角 速度 , 与 实 际 的横 摆 角 速 度做 差 得 到 横 摆 角速
的 减小 而减 小 , 即 车 辆 稳 定 性 受 质 心 侧 偏 角 的影 响 增 大 。 ( 4 )
车辆质 心侧偏角偏大 , 车辆转 向的特征 , 即司机驾驶意 向 , 可由 车辆横摆角速度 表示 ; 但如果 车辆质 心侧偏 角偏小 , 车辆 行驶
轨 迹 则 无 法 由横 摆 角 速 度 表 示 。
对汽车操纵稳定性影响因素进行分析设计适合于四轮独立驱动汽车的稳定性控制策略利用四轮独立驱动汽车每个轮的驱动力可以单独控制的优点在传统车只能靠制动来改变车轮心侧偏角联合作为表征汽车操纵稳定性的变量进行控制且较内燃机汽车的机械传动效悬架技术与驱动以后掌握采用主开发能力具有指导意义的车辆的特点以及稳定性控制策略的总体车辆受到地面施加的期望的附加横摆力矩通过控制驱动电机将车轮的滑移定性控制理念是选取汽车的横摆角速度和纵向速度与侧向速度确定汽车质心相关文献也指出质心侧偏角对于车辆稳定性控可以得到以下结论
动力电池的电动汽车驱动系统仿真与优化设计
动力电池的电动汽车驱动系统仿真与优化设计随着电动汽车市场的快速发展,动力电池的性能和稳定性对电动汽车的性能和续航里程至关重要。
为了实现高效、可靠、安全的电动汽车驱动系统,仿真与优化设计成为一项重要的工作。
本文将从仿真工具的选择、关键参数的优化以及系统设计的优化三个方面进行论述。
一、仿真工具的选择在动力电池的电动汽车驱动系统仿真与优化设计中,首先需要选择合适的仿真工具。
目前,常用的仿真工具有MATLAB/Simulink、LabVIEW、AMESim等。
这些工具具有模块化、可视化的特点,适用于复杂系统的建模和仿真。
二、关键参数的优化为了实现电动汽车驱动系统的优化设计,需要优化关键参数,提升整个系统的性能。
关键参数包括动力电池的容量、电池充放电性能、电机的效率以及控制策略等。
通过建立数学模型,利用仿真工具对这些参数进行优化,可以提高电动汽车的续航里程、加速性能、能量利用率等关键指标。
三、系统设计的优化在动力电池的电动汽车驱动系统设计中,需要考虑动力电池与电机、控制系统之间的匹配和协调。
一方面,电机的选型和控制策略需要与动力电池的特性相匹配,以充分发挥电机的性能。
另一方面,电动汽车的整车控制系统也需要与电池、电机相协调,确保驱动系统的稳定性和安全性。
通过仿真与优化设计,可以找到最佳的匹配方案,提升整个系统的效能。
综上所述,动力电池的电动汽车驱动系统仿真与优化设计是电动汽车技术发展的关键环节。
选择合适的仿真工具、优化关键参数和系统设计的协调配合,可以实现电动汽车驱动系统的性能提升和能耗优化。
通过不断改进与优化,电动汽车的发展前景将更加广阔。
考虑转向意图的分布式电驱动汽车横摆稳定性控制
考虑转向意图的分布式电驱动汽车横摆稳定性控制
杜云雷;王先云;韩忠良;王淑芬;杨建森
【期刊名称】《重庆理工大学学报:自然科学》
【年(卷),期】2022(36)8
【摘要】为提高分布式驱动电动汽车极限工况下的操纵稳定性,提出考虑驾驶员转向意图的四轮力矩矢量控制(TVC)策略。
该控制策略利用方向盘转角识别驾驶员转向意图,并根据经验驾驶员操作特性调节车辆稳定性因数,建立含转向意图的横摆角速度期望模型。
控制器采取分层式模型跟踪控制方式,上层运动控制器采用模型预测控制,决策附加横摆力矩,下层控制分配器通过二次规划的最优分配,得到四轮转矩作为控制量保持车辆对目标的跟随。
最后基于CarSim&Simulink联合仿真平台,在双移线工况下对控制策略进行仿真验证。
结果表明:考虑驾驶员转向意图的TVC 策略可有效减小驾驶员极限工况下的操作负荷,进一步提高车辆操纵稳定性。
【总页数】8页(P101-108)
【作者】杜云雷;王先云;韩忠良;王淑芬;杨建森
【作者单位】大连大学机械工程学院;中汽研(天津)汽车工程研究院有限公司;中国汽车技术研究中心有限公司
【正文语种】中文
【中图分类】U270.11
【相关文献】
1.考虑侧向稳定性的分布式电驱动汽车制动滑移率控制
2.四轮独立驱动电动汽车转向稳定性的横摆力矩控制
3.四轮独立转向/独立电驱动汽车四轮转向与横摆力矩集成控制研究
4.基于AFS和DYC集成控制的分布式驱动电动汽车横摆稳定性控制
5.8×8分布式电驱动装甲车辆稳定性直接横摆力矩与转矩矢量控制
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
−
Fxfl ) cosδ
+
( Fyfl
−
Fyfr
) sin δ
] tw1 2
(4)
(4)车轮的力矩平衡方程:
•
w Iw ⋅ i =−Rw ⋅ Fxi − Tbi + Tdi (5)
其 中 FA =(Fxfl + Fxfr )、FB =(Fyfl + Fyfr ) 、 m 为 整 车 质 量 ; Vy 为 汽 车 的 侧 向 车 速 ; Vx 为 汽 车 的 纵 向 车 速 ; r 为 汽 车 的 横 摆 角 速 度 ; Fxfr、Fxfr Fxrl Fxrr 分别为前左、前右、后左、后右轮的纵向力 ; Fyfl 、 Fyfr 、 Fyrl 、 Fyrr 分别为前左、前右、后左、后右轮侧向力 ; δ 为前轮转 角; Iz 为横摆转动惯量 ;a、b 分别为质心到前、后轴的距离; tw1 和 tw2 分别为前后轴轮距 ; Iw 为轮胎的转动惯量 ; wi 为车轮的角速度,其中 i = fl、fr rl rr ; Tbi 和 Tdi 分别为各轮上的制动力矩和驱动力矩; Rw 为车轮半径。
1 轮胎模型
分布式驱动电动汽车的操纵稳定性主要由轮胎的侧偏特性决定,
同时轮胎的非线性特性对汽车的操纵稳定性也有重要影响,所以轮胎 模型的建立显得十分必要。本文采用 Magic Formula( MF) 轮胎模型 [3],
其关系表达式如下:
Y= (x) =y D
y(x) sin[C
+ Sv arctan[
αij
=
arctan(Vyij Vxij
)
(8)
sij
=
wfl R − Vxij Vxij
(9)
其中: vxfl = Vx cosδ + Vy sin δ − l1γ sin(β1 − δ ) vyfl = Vy cosδ −Vx sin δ + l1γ cos(β1 − δ ) vxfr = Vx cosδ + Vy sin δ + l1γ sin(β1 + δ ) vyfr = Vy cosδ −Vx sin δ + l1γ cos(β1 + δ ) (10) vxrl = Vx − l2γ sin β2 , vyrl = Vy − l2γ co s β2 , vxrr = Vx + l2γ sin β2 , vyrr = Vy − l2γ co s β2 ,
图 1 整车动力学模型 (1)纵向力平衡方程:
•
m(Vx − r= ⋅Vy ) FA cosδ − FB sinδ + Fxrl + Fxrr (2)
(7)
其中,l 为前轴和后轴的距离,h 为车辆质心高度,g 为重力加速度。
轮胎的侧偏角αij 以及纵向滑移率 sij 的计算公式如下:
表 1 魔术公式拟合系数
a1
a2
a3
a4
a5
a6
汽车质心侧偏角表达式如下:
β = arctan(Vy ) (6) Vx
考虑到汽车各轮会发生载荷转移,其表达如下 [5]:
2 车身动力学模型
对分布式驱动电动汽车模型进行简化建模,假设车辆坐标系原点 与汽车的质心重合,以及汽车纵向速度不变,忽略空气阻力和悬架的 作用,所建的八自由度汽车仿真模型包括汽车的纵向、横向、横摆运 动和四个车轮的转动以及前轮转角运动,其受力分析如下图所示 [4]。
车辆技术
车辆工程技术
5
分布式驱动电动汽车操纵稳定性仿真
刘来林 (重庆交通大学 机电与车辆工程学院 , 重庆 400074)
摘 要:为模拟分布式驱动电动汽车的操纵稳定性,借助 Simulink 仿真平台建立了分布式驱动电动汽车的八自由度动力学仿真模型。该模型 的输入为前轮转角的阶跃信号,通过仿真得到车辆的质心侧偏角和横摆角速度的变化特征。分析仿真结果表明,所搭建的模型可以真实的反映 分布式驱动电动汽车运动特性的变化,该模型能为分布式驱动电动汽车在其他方面的研究提供可靠的基础。 关键词:八自由度;动力学模型;质心侧偏角;横摆角速度
(2)侧向力平衡方程:
•
m(Vy + r= ⋅Vx ) FA sin δ + FB cosδ + Fyrl + Fyrr (3)
(3)绕 Z 轴力矩平衡方程:
•
= Iz ⋅ r
+(Fxrr
(FA si 2
+ FB cosδ )a + [(Fxfr − (Fyrl + Fyrr )b
0 引言
分布式电动汽车成为当下研究热点,搭建一个准确仿真模型显得 尤为重要,而车辆的操纵稳定性又能直观的检验模型的准确性,同时 车辆的操纵稳定性在分布式驱动电动汽车的研究中扮演者重要角色 [1]。 一般的操纵稳定性分析方法是通过实车试验来获取实验数据,但在极 限工况下该方法受到限制。基于此可利用虚拟样机技术,对汽车操纵 稳定性进行虚拟试验仿真分析,从而极大的降低试验成本 [2]。分布式 驱动电动汽车八自由度汽车模型主要考虑了车辆纵向与侧向的运动以 及四轮的转动和前轮转向运动,本文借助于 Simulink 平台建立了动力 学仿真模型 , 在分布式驱动电动车的驱动工况下进行操纵稳定性仿真 研究。
= β1 arctan(tw1= / 2a),l1 = β2 arctan(tw2= / 2b),l1
(tw1 / 2)2 + a2 (11) (tw2 / 2)2 + b2
6
车辆工程技术
车辆技术
3 仿真建模及结果分析
本文借助 Simulink 中 S-function 建模直观和编程灵活的特点 [6],创 建了分布式驱动电动汽车的八自由度车辆动力学模型,主要包括轮胎 模型和汽车车身动力学模型。嵌入轮胎建模用到的参数和汽车车身动 力学模型基本参数 [7-8],以及搭建的模型如下。
Bx
−
E
(
Bx
−
arctan
Bx)]]
(1)
=x X + Sh
式中 : Y 为侧向力、纵向力或回正力矩 ; X 为侧偏角α 或纵向滑移
率 s ; D 为峰值因子 ; B 为刚度因子 ; C 为曲线形状因子 ; E 为曲线曲率
因子 ; Sh 为曲线水平方向的漂移 ; Sv 为曲线垂直方向的漂移。