机器人及运动学分析PPT课件
合集下载
ppt机器人正逆运动学解析
将上面两个方程两边平方相加,并利用和差化积公式得到
S2 S23 C2C23 cos3
于是有:
C3
(
pxC1
py S1
C234a4 )2 ( pz 2a2a3
S234a4 )2
a22
a32
已知 S3 1 C32
于是可得到:
3
arctan
S3 C3
依次类推,分别在方程2.19两边左乘A1~A4的逆,可得到
O4
x2
z5
y5
x4
O5
y4
z2
y2
关节3
A1 连杆2
O2 坐标系2
x5
o3 , o4 , o5重合 d4 d5 0
关节2 O1
z1
坐标系1
y1 连杆1
x1
d2
关节1 坐标系0
ai—沿 xi 轴, zi-1 轴与 xi 轴交点到Oi 的距离 αi — 绕 xi 轴,由 zi-1 转向zi di — 沿 zi-1 轴,zi-1 轴和 xi 交点至Oi –1 坐标
系原点的距离 θi — 绕 zi-1 轴,由 xi-1转向 xi
连杆0
z0 y0
d1 x0
O0
解:
例2、PUMA560运动学方程(六个自由度,全部是旋转关节) 关节变量都是θ
θ2
θ1
θ3
θ5
θ4 θ6
PUMA560机器人的连杆及关节编号
A1
O1 O0
A2
为右手坐标系,Yi轴:按右手定则
C234a4 ) S234a4 )
进而可得:
4 234 2 3
机器人运动学课件

轨迹规划实现
坐标系选择
在进行轨迹规划时,需要选择合适的坐标系,如笛卡尔坐 标系和关节坐标系等,以便于描述机器人的运动轨迹和关 节角度。
插值函数选择
选择合适的插值函数能够保证机器人的运动轨迹的光滑性 和连续性,需要根据实际需求和约束条件来确定插值函数 的形式和参数。
插值点选择
选择合适的插值点是实现精确轨迹的关键,需要根据实际 需求和约束条件来确定插值点的数量和位置。
根据不同的分类标准,轨迹规划可以分为多种类型,如基于时间的轨迹 规划、基于空间的轨迹规划、笛卡尔空间的轨迹规划和关节空间的轨迹 规划等。
轨迹规划方法
基于多项式的轨迹规划方法
基于样条曲线的轨迹规划方法
该方法通过使用多项式函数来描述机器人 的运动轨迹,具有简单、易实现的特点, 但可能会产生较大的轨迹误差。
描述机器人末端执行器的 方向变化。
齐次变换矩阵
用于描述平移和旋转的复 合变换,包括旋转和平移 矩阵的组合。
03
机器人运动学方程
齐次变换
齐次变换定义
齐次变换描述了刚体在空间中的位置和姿态,由平移和旋转组成 。
齐次变换矩阵
齐次变换可以用一个4x4的矩阵来表示,该矩阵包含了刚体的位置 信息和姿态信息。
绝对位置
相对于参考坐标系的机器 人位置。
相对位置
相对于机器人上某固定参 考点的位置。
姿态描述
方向描述
描述机器人的朝向,通常使用欧拉角 (俯仰角、偏航角、滚动角)或四元 数表示。
姿态矩阵
通过旋转和平移矩阵描述机器人末端 执行器的姿态。
坐标系转换
平移变换
描述机器人末端执行器在 空间中的位置变化。
旋转变换
根据机器人的关节类型和连接方式, 通过几何关系和运动约束建立机器人 末端执行器的位置和姿态的运动学方 程。
2024年度-机器人教学课件(共26张PPT)pptx

介绍了机器人常用传感器类型、 工作原理及在机器人感知中的应 用。
机器人自主导航与定位
阐述了机器人自主导航的基本原 理、定位方法及SLAM技术。
机器人基本概念与分类
机器人操作系统与编程
介绍了机器人的定义、发展历程 、分类及应用领域。
介绍了ROS的基本概念、功能特 点、常用命令及编程实践。
32
学生自我评价报告分享
第三代机器人
智能型机器人,具备自主 学习和决策能力,能够适 应复杂环境和任务。
5
未来趋势展望
人机协作
随着人工智能技术的发展,未来 机器人将更加注重与人类的协作 ,共同完成任务。
应用领域拓展
随着技术进步和应用需求增加, 机器人将在更多领域得到应用, 如医疗、教育、娱乐等。
自主化
机器人将具备更高的自主性和智 能化水平,能够独立完成复杂任 务。
以促进课程的不断完善和提高。
33
下一步学习计划和资源推荐
深入学习机器人相关领域知识
鼓励学生继续深入学习机器人相关领域知识,如机器视觉、深度学习在机器人中的应用等 。
参加机器人竞赛和项目实践
推荐学生参加各类机器人竞赛和项目实践,锻炼自己的实践能力和团队协作能力。
利用在线资源进行自主学习
推荐学生利用MOOCs、在线实验室等资源进行自主学习和实践操作,提高自己的学习效 果和兴趣。
01
学习成果展示
通过课程学习,学生能够掌握机器人基本概念、运动学与控制、传感器
与感知、自主导航与定位等关键知识点,并具备一定的实践操作能力。
02
学习方法分享
学生可以采用多种学习方法,如课前预习、课后复习、小组讨论、实践
操作等,以提高学习效果和兴趣。
机器人学运动学分析_Kinematics
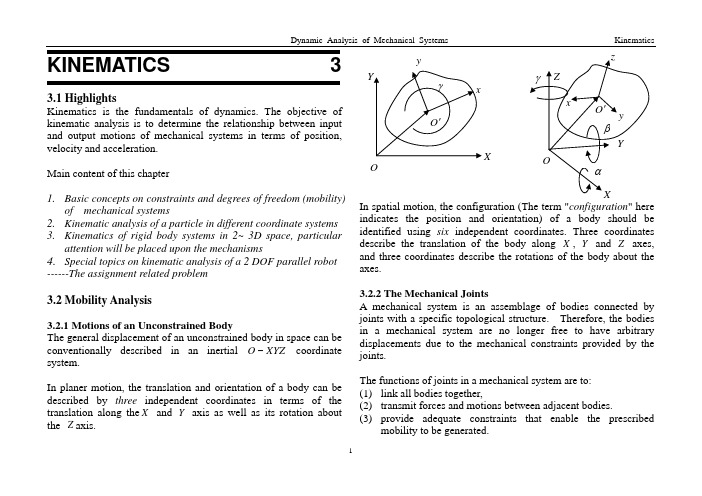
Dynamic Analysis of Mechanical Systems
Kinematics
Joints can be classified by the degrees of freedom allowed or restricted. The commonly used joints are listed in Table 1. 3.2.3 Mobility Analysis One of the basic steps in the kinematic analysis of mechanical systems is to determine the number of degrees of freedom or independent coordinates required to determine the configuration of the system. It can be shown that the number of constraints provided by a joint is equal to the number of degrees of freedom eliminated from the unconstraint system as a result of using this joint. In the planar system, the configuration of a rigid body undergoing unconstrained motion can be described by three independent coordinates due to the common constraints. Therefore, a planar system with n unconstrained movable bodies has 3 n DOF. If the system has p joints, each of which provides two constraints (note the common constraints), then the number of degrees of the system can be evaluated by the mobility (Glubler) criterion
机器人技术基础课件第三章-机器人运动学精选全文完整版
03T 01T12T 23T
如此类推,对于六连杆机器人,有下列矩阵:
06T 01T 12T 23T 34T 45T 56T
3.2 3.2 机械手运动学方程
26
0 6
T
3.1.4 连杆变换矩阵及其乘积
06T 01T12T 23T 34T 45T 56T
机器人运动学方程
此式右边表示了从固定参考系到手部坐标系的各连杆
一个六连杆机械手可具有六个自由度,每个连杆含 有一个自由度,并能在其运动范围内任意定位与定向。 其中三个自由度用于规定位置,而另外三个自由度用 来规定姿态。
8
3.1.1 连杆坐标系
机械手的运动方向
机器人手部的位置和姿态也可以
用固连于手部的坐标系{B}的位姿
来表示
关节轴为ZB, ZB轴的单位方向 矢量α称为接近矢量,指向朝外。
(1) 坐标系{i-1}绕xi-1轴转角αi-1,使Zi-1与Zi平行,算子为Rot(x, αi-1) ; (2) 沿Xi-1轴平移ai-1,使Zi-1和Zi共线, 算子为Trans(ai-1,0,0); (3)绕Zi轴转角θi; 使得使Xi-1与Xi平行, 算子为Rot(z,θi);
(4) 沿Zi轴平移di。使得i-1系和i系重合, 算子为Trans(0,0,di)。
3.2.1 机器人正运动学方程
连杆 i 1
2
3
连杆长 度ai-1
0
a0
a1
连杆偏距 di 0
0
d2
连杆扭角 αi-1 00
00
-900
关节角 θi
θ1(00) θ2(00) θ3(00)
3.2.1 机器人正运动学方程
该3自由度机器人的运动学方程为:
如此类推,对于六连杆机器人,有下列矩阵:
06T 01T 12T 23T 34T 45T 56T
3.2 3.2 机械手运动学方程
26
0 6
T
3.1.4 连杆变换矩阵及其乘积
06T 01T12T 23T 34T 45T 56T
机器人运动学方程
此式右边表示了从固定参考系到手部坐标系的各连杆
一个六连杆机械手可具有六个自由度,每个连杆含 有一个自由度,并能在其运动范围内任意定位与定向。 其中三个自由度用于规定位置,而另外三个自由度用 来规定姿态。
8
3.1.1 连杆坐标系
机械手的运动方向
机器人手部的位置和姿态也可以
用固连于手部的坐标系{B}的位姿
来表示
关节轴为ZB, ZB轴的单位方向 矢量α称为接近矢量,指向朝外。
(1) 坐标系{i-1}绕xi-1轴转角αi-1,使Zi-1与Zi平行,算子为Rot(x, αi-1) ; (2) 沿Xi-1轴平移ai-1,使Zi-1和Zi共线, 算子为Trans(ai-1,0,0); (3)绕Zi轴转角θi; 使得使Xi-1与Xi平行, 算子为Rot(z,θi);
(4) 沿Zi轴平移di。使得i-1系和i系重合, 算子为Trans(0,0,di)。
3.2.1 机器人正运动学方程
连杆 i 1
2
3
连杆长 度ai-1
0
a0
a1
连杆偏距 di 0
0
d2
连杆扭角 αi-1 00
00
-900
关节角 θi
θ1(00) θ2(00) θ3(00)
3.2.1 机器人正运动学方程
该3自由度机器人的运动学方程为:
第二章 机器人运动学PPT课件
系的位置矢量 AP、BP具有如下变换关系
APB ARBPAPBO
(2-1-12)
15
ZA {A}
OA XA
ZB
ZC {C}
{B}
AP
BP YB
OB(OC)
YC
P A
BO XC YA
XB
图2.1.4 平移加旋转变换 注:坐标系{C}为过渡坐标系
16
2.齐次变换
一般情况下,刚体的运动是转动和平移的复合运 动,为了用同一矩阵既表示转动又表示平移,因此引 入齐次坐标变换矩阵。
28
X
偏转
Z
横滚
O船
Y
俯仰
偏转
X
Z
横滚
O
夹手
Y
俯仰
(a)
(b)
图2.1.11 RPY角的定义
29
§2.2 操作臂运动学
一、机械手位置和姿态的表示
图2.2.1所示为机器人的一个机械手。 描述机械手方位的坐标系置于手指尖的 中 位心置,可其以用原矢点量由矢p在量固p表定示坐。标机系械的手坐的标 表示为
H
0
1
0
b
称为平移的齐次变换矩阵,又可表示为
0 0 1 c
0
0
0
1
HTraa,b n,c)s。(矩阵中的第四列为平移参考矢量的齐次坐标。
19
Z
V
U
P
O
Y
X 图2.1.5 平移的齐次变换
20
例平2移.1,求向平量移U 后i得3到j的5k向沿量向V量 。P 3i7jk
解:
1 0 0 3 1 4
系,首先需要用两个参数对每个连杆进行描述。 如图2.2.2所示,对于任意一个两端带有关节i和
机器人运动学ppt
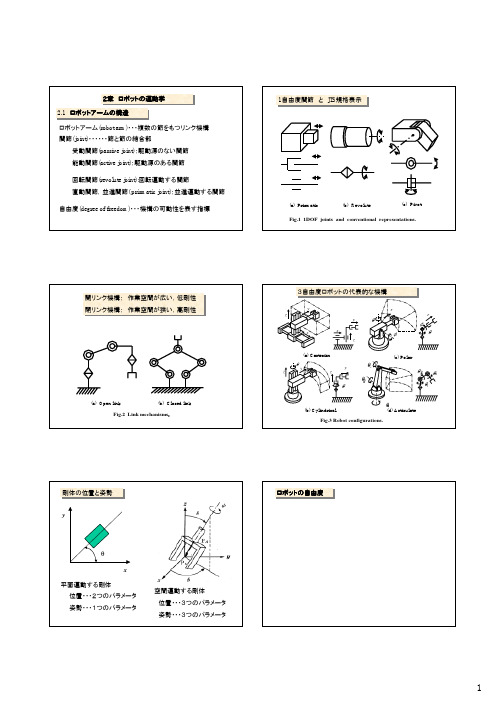
2章 ロボットの運動学
2章 ロボットの運動学2.1 ロボットアームの構造ロボットアームの構造
2.1 ロボットアームの構造ロボットアームの構造ロボットアーム(robot arm)・・・複数の節をもつリンク機構1自由度関節 と JIS 規格表示
1自由度関節 と JIS 規格表示開リンク機構: 作業空間が広い,低剛性閉リンク機構: 作業空間が狭い,高剛性
開リンク機構: 作業空間が広い,低剛性閉リンク機構: 作業空間が狭い,高剛性r
y
3自由度ロボットの代表的な機構
3自由度ロボットの代表的な機構剛体の位置と姿勢剛体の位置と姿勢ロボットの自由度
ロボットの自由度
空間リンク機構(ロボット)の可動度(mobility)
空間リンク機構(ロボット)の可動度(mobility)平面運動機構の自由度と可動度の例
平面運動機構の自由度と可動度の例パラレルリンク機構の自由度と可動度
パラレルリンク機構の自由度と可動度ロボットの座標系(coordinate system)
ロボットの座標系(coordinate system)座標系の平行移動
座標系の平行移動座標系の回転移動
座標系の回転移動
座標系の平行移動と回転移動座標系の平行移動と回転移動
z A
姿勢表現・・・zyzオイラー角
姿勢表現・・・zyzオイラー角
姿勢表現・・・ロール・ピッチ・ヨウ角(zyxオイラー角)姿勢表現・・・ロール・ピッチ・ヨウ角(zyxオイラー角)
z。
第七章 机器人运动学ppt课件

Ai Ai-1
编辑版pppt
8
➢ 杆件参数的定义—— 、li 、 i 和di i
由运动学的观点来看,杆件保持其两端关节间的形态
不变,这种形态由两个参数决定:杆件长度 li 和杆件扭
转角 i 。杆件的相对位置关系,由另外两个参数决定:
杆件的距离 di 和杆件的回转角 i 。
li — 关节 Ai 轴和 Ai+1 轴线公法线的长度。
li
i zi
yi
xi oi
绕 xi 轴转 i 角度,两
坐标系完全重合.
li 1
di
zi1 oi1
yi1
i
xi1
i 1 A i R ( z i 1 ,i ) T r a n s ( z i 1 , d 编i ) 辑T 版pr ppa t n s ( x i , l i ) R ( x i ,i )
机器人技术及空间应用
第七章 机器人运动学
机器人运动学主要是把机器人相对于固定参考 系的运动作为时间的函数进行分析研究,而不 考虑引起这些运动的力和力矩 将机器人的空间位移解析地表示为时间的函数, 特别是研究机器人关节变量空间和机器人末端 执行器位置和姿态之间的关系 本章将讨论机器人运动学几个具有实际意义的 基本问题。
• 并联机器人:刚性好,负载大,误差不积累,工作空间 小,姿态范围不大。
• 本章讲解以串联机器人为主。
编辑版pppt
3
§7.1.2 运动学研究的问题
Where is my hand?
Direct Kinematics HERE!
运动学正问题
运动学逆问题
How do I put my hand here?
ny
z
n0x
编辑版pppt
8
➢ 杆件参数的定义—— 、li 、 i 和di i
由运动学的观点来看,杆件保持其两端关节间的形态
不变,这种形态由两个参数决定:杆件长度 li 和杆件扭
转角 i 。杆件的相对位置关系,由另外两个参数决定:
杆件的距离 di 和杆件的回转角 i 。
li — 关节 Ai 轴和 Ai+1 轴线公法线的长度。
li
i zi
yi
xi oi
绕 xi 轴转 i 角度,两
坐标系完全重合.
li 1
di
zi1 oi1
yi1
i
xi1
i 1 A i R ( z i 1 ,i ) T r a n s ( z i 1 , d 编i ) 辑T 版pr ppa t n s ( x i , l i ) R ( x i ,i )
机器人技术及空间应用
第七章 机器人运动学
机器人运动学主要是把机器人相对于固定参考 系的运动作为时间的函数进行分析研究,而不 考虑引起这些运动的力和力矩 将机器人的空间位移解析地表示为时间的函数, 特别是研究机器人关节变量空间和机器人末端 执行器位置和姿态之间的关系 本章将讨论机器人运动学几个具有实际意义的 基本问题。
• 并联机器人:刚性好,负载大,误差不积累,工作空间 小,姿态范围不大。
• 本章讲解以串联机器人为主。
编辑版pppt
3
§7.1.2 运动学研究的问题
Where is my hand?
Direct Kinematics HERE!
运动学正问题
运动学逆问题
How do I put my hand here?
ny
z
n0x
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
❖ 建立D-H坐标系 ❖ 确定各连杆的D-H参数和关节变量 ❖ 分别求出两连杆间的位姿矩阵 ❖ 求机器人运动方程,进行机器人运动学分析
.
机器人正运动学分析
机器人正运动学:在给定组成运动副的相邻连杆的相对位置情况 下,确定机器人末端执行器(安装于机器人末端的夹持器或工具)的位形
.
确定D-H参数和关节变量
.
原理
T6=A1A2A3A4A5A6 =A (θ1)A (θ2)A (θ3)A (θ4)A (θ5)A (θ6)
T6
已知T6,要求θi,这就是机器人逆运动学原理
.
通过该方程,可求得:
θ1=arctan py/px-arctan d2 / (±√px²+py²-d2²) θ2=θ23-θ3
θ23=arctan [-(a3+a2c3)pz+(c1px+s1py)(a2s3-d4)]/[(-
.
返回
.
D-H坐标系
为了研究机器人各连杆之间的位移关系, Denavit和Hartenberg在1955年提出了一种 通用的方法,这种方法在机器人的每个连杆 上都固接一个坐标系,然后用一个 4× 4的 齐次变换矩阵描述相邻两连杆的空间关系, 这样,通过依次变换,就可以推导出“工具 坐标系”相对于“基础坐标系”的等价齐次 变换矩阵,从而建立机器人的运动学方程。 这就是我们通常所称的D-H参数方法。
.
求出两连杆间的位姿矩阵
.
机器人运动学方程
T6=A1A2A3A4A5A6
T6:表示机器人末端连杆坐标系相对于基 坐标系的位姿 A1:表示杆1相对于基座的位置 A2:表示杆2相对于杆1的位置 A3、A4、A5、A6以此类推
❖ T6
由此,我们可以求出T6的 12个参数,即可求得该型机 器人的正运动学方程
d4+a2s3)px+(c1px+s1py)(a2c3+a3)]
θ3=arctan a3/d4-arctan k/±√a3²+d4²-k²
k=(px²+py²+pz²-a2²-a3²-d2²-d4²)/(2a2)
θ4=arctan (-axs1+ayc1)/(-axc1c23-ays1c23+azs23) θ5=arctan s5/c5 θ6=arctan s6/c6
.Байду номын сангаас
根据运动学方程,可得一下参数:
在该方程中,唯一不确定的参数就是θ,改变θ的值就可 以改变机器人的位置和姿态,使之运动到期望的位置。
.
机器人逆运动学分析
❖ 定义 机器人运动学逆解问题是指在给定机器人末端执行
器(或夹持器)位姿的情况下,求解得到该位形的各 关节转角,即给出T6,求出θi ❖ 意义
是机器人运动控制算法设计及运动规划的基础,也 是机器人速度、加速度、受力分析、误差分析、工 作空间分析、动力分析和机器人综合等的基础
返回
.
.
❖ 逆向运动学的解的特点 多解性
原因:由于解反三角函数函数方程产生的。 对于一个真实的机器人,只有一组解与实际 情况对应,有些解不能实现,为此必须做出 判断,选择出其中最满意的一组解,以满足 机器人的工作要求。 可解性
.
参数确定原则
Z轴:沿关节线的轴线 X轴:沿相邻两个坐标轴的公法线 αi(连杆扭角):Zi和Zi-1两轴心线的夹角 ai(连杆长度):从i轴关节到i+1关节轴的公法线 长度(Zi与Zi-1公法线长度) di(两连杆距离):相邻两杆三轴心线的两条公法 线的距离 θi(两杆夹角):Xi与Xi-1两坐标轴的夹角
.
机器人系统基本结构
❖ 一般由四个部分组成:机械手、环境、任务 和控制器
.
机器人学研究领域
❖ 机器人运动学 ❖ 机器人动力学 ❖ 机器人位置和力控制 ❖ 机器人传感器技术 ❖ 机器人轨迹(路径)规划 ❖ 机器人程序设计
.
机器人运动学
❖ 定义
运动学研究旨在解决机器人的手臂转向何方(动力学则为了 解决移动的速度和力)。机器人运动学可分两类:正运动学 分析和逆运动学分析。
正运动学的问题是机器人运用它对自身的了解(关节角度和 手臂长度)来判断自己在三维空间中到底身处何方。
逆运动学正好相反,它解决机器人如何移动才能达到合适 的姿势(改变关节位置)这一问题 。
❖ 意义
是研究机器人动力学和控制的重要基础,它涉及到机器人 运动方程的表示、求解及雅克比矩阵的分析与计算等。
.
机器人运动学分析的步骤
机器人技术
机器人概要及运动学分析
.
机器人
❖ 机器人定义 机器人是一种自动化的机器,这种机器具备一
些与人或生物相似的智能能力,如感知能力、规划 能力、动作能力和协同能力,是一种具有高度灵活 性的自动化机器。 ❖ 机械手定义
一种模拟人手操作的自动机械,它可按固定程 序抓取、搬运物件或操持工具完成某些特定操作。
.
机器人正运动学分析
机器人正运动学:在给定组成运动副的相邻连杆的相对位置情况 下,确定机器人末端执行器(安装于机器人末端的夹持器或工具)的位形
.
确定D-H参数和关节变量
.
原理
T6=A1A2A3A4A5A6 =A (θ1)A (θ2)A (θ3)A (θ4)A (θ5)A (θ6)
T6
已知T6,要求θi,这就是机器人逆运动学原理
.
通过该方程,可求得:
θ1=arctan py/px-arctan d2 / (±√px²+py²-d2²) θ2=θ23-θ3
θ23=arctan [-(a3+a2c3)pz+(c1px+s1py)(a2s3-d4)]/[(-
.
返回
.
D-H坐标系
为了研究机器人各连杆之间的位移关系, Denavit和Hartenberg在1955年提出了一种 通用的方法,这种方法在机器人的每个连杆 上都固接一个坐标系,然后用一个 4× 4的 齐次变换矩阵描述相邻两连杆的空间关系, 这样,通过依次变换,就可以推导出“工具 坐标系”相对于“基础坐标系”的等价齐次 变换矩阵,从而建立机器人的运动学方程。 这就是我们通常所称的D-H参数方法。
.
求出两连杆间的位姿矩阵
.
机器人运动学方程
T6=A1A2A3A4A5A6
T6:表示机器人末端连杆坐标系相对于基 坐标系的位姿 A1:表示杆1相对于基座的位置 A2:表示杆2相对于杆1的位置 A3、A4、A5、A6以此类推
❖ T6
由此,我们可以求出T6的 12个参数,即可求得该型机 器人的正运动学方程
d4+a2s3)px+(c1px+s1py)(a2c3+a3)]
θ3=arctan a3/d4-arctan k/±√a3²+d4²-k²
k=(px²+py²+pz²-a2²-a3²-d2²-d4²)/(2a2)
θ4=arctan (-axs1+ayc1)/(-axc1c23-ays1c23+azs23) θ5=arctan s5/c5 θ6=arctan s6/c6
.Байду номын сангаас
根据运动学方程,可得一下参数:
在该方程中,唯一不确定的参数就是θ,改变θ的值就可 以改变机器人的位置和姿态,使之运动到期望的位置。
.
机器人逆运动学分析
❖ 定义 机器人运动学逆解问题是指在给定机器人末端执行
器(或夹持器)位姿的情况下,求解得到该位形的各 关节转角,即给出T6,求出θi ❖ 意义
是机器人运动控制算法设计及运动规划的基础,也 是机器人速度、加速度、受力分析、误差分析、工 作空间分析、动力分析和机器人综合等的基础
返回
.
.
❖ 逆向运动学的解的特点 多解性
原因:由于解反三角函数函数方程产生的。 对于一个真实的机器人,只有一组解与实际 情况对应,有些解不能实现,为此必须做出 判断,选择出其中最满意的一组解,以满足 机器人的工作要求。 可解性
.
参数确定原则
Z轴:沿关节线的轴线 X轴:沿相邻两个坐标轴的公法线 αi(连杆扭角):Zi和Zi-1两轴心线的夹角 ai(连杆长度):从i轴关节到i+1关节轴的公法线 长度(Zi与Zi-1公法线长度) di(两连杆距离):相邻两杆三轴心线的两条公法 线的距离 θi(两杆夹角):Xi与Xi-1两坐标轴的夹角
.
机器人系统基本结构
❖ 一般由四个部分组成:机械手、环境、任务 和控制器
.
机器人学研究领域
❖ 机器人运动学 ❖ 机器人动力学 ❖ 机器人位置和力控制 ❖ 机器人传感器技术 ❖ 机器人轨迹(路径)规划 ❖ 机器人程序设计
.
机器人运动学
❖ 定义
运动学研究旨在解决机器人的手臂转向何方(动力学则为了 解决移动的速度和力)。机器人运动学可分两类:正运动学 分析和逆运动学分析。
正运动学的问题是机器人运用它对自身的了解(关节角度和 手臂长度)来判断自己在三维空间中到底身处何方。
逆运动学正好相反,它解决机器人如何移动才能达到合适 的姿势(改变关节位置)这一问题 。
❖ 意义
是研究机器人动力学和控制的重要基础,它涉及到机器人 运动方程的表示、求解及雅克比矩阵的分析与计算等。
.
机器人运动学分析的步骤
机器人技术
机器人概要及运动学分析
.
机器人
❖ 机器人定义 机器人是一种自动化的机器,这种机器具备一
些与人或生物相似的智能能力,如感知能力、规划 能力、动作能力和协同能力,是一种具有高度灵活 性的自动化机器。 ❖ 机械手定义
一种模拟人手操作的自动机械,它可按固定程 序抓取、搬运物件或操持工具完成某些特定操作。