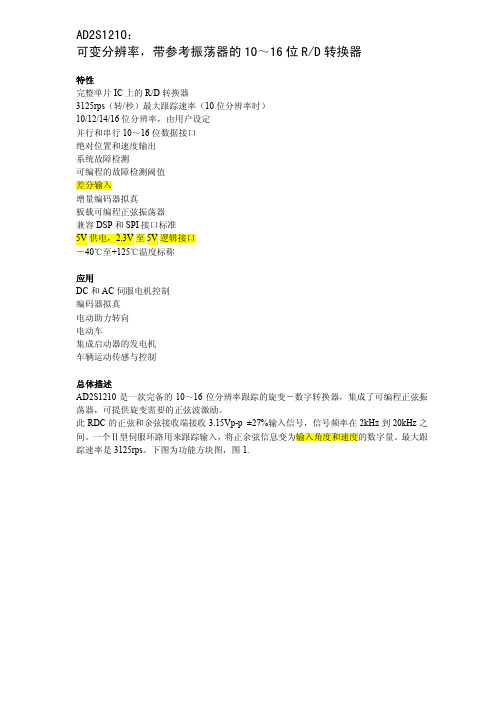
旋变解码芯片AD2S1205应用系统设计
ADS1200解码芯片测试报告

1.测试项目及名称旋转变压器解码芯片AD2S1200功能测试。
2.试验目的和要求1)芯片功能的测试2)对芯片编程后的测试3)芯片外围电路(CAN通讯)测试3.被测样品的型号、名称及主要性能指标本试验的被测电路板为专门的AD2S1200外围电路的电路板,集成了解码外围电路,主控芯片及CAN通讯电路。
4.测试方法、步骤及测试结果1)电路及线束的连接a)正确连接被测板的电源,给被测供12V电压,待板上电源指示灯亮,显示正常。
b)正确连接旋转变压器与被测板,使六个相应的旋变信号正确接入板内。
c)连接CAN通讯线与被测板的通讯电路,使之能正常通讯2)根据AD2S1200的通讯时序以及外围电路,正确地编写程序,烧入主控芯片,程序明细见附件1.3)硬件电路的调试a) 测量被测板上电源正负极是否短路,正常上电,观察电源批示灯是否点亮。
如点,则进行下一步测试。
b) 将旋转变压器调整到零位置,即输出结果COSIN信号输出为最大值时,而SIN信号输出为0。
c) 给被测板供12V电源,待指示灯亮后,测量被测板上旋变输入信号是否正常输入解码芯片。
4) 程序代码的编写与测试a) 连接仿真器,编写简单代码对DSP的输入输出进行测试,验证DSP工作正常及基础代码程序是否正常。
b) 按照DSP与AD2S1200的通讯时序进行程序代码的编写,同时编写CAN通讯部分的代码,以便验证测试结果。
5)功能测试步骤a) 连接CAN通讯工具,观察是否可以正常通讯,如果通讯正常,正常启动被测板,利用波形记录仪观察DSP与解码芯片通讯的各时序信号是否正确。
b) 将旋转变压器分别旋转到0,45,90,135,180,225,270,315度观察上位机数据解码回来的数据,验证结果的正确性。
测试结果1 当旋转变压器的角度为0度时,测试的芯片输入波形,上位机结果及通讯时序各信号波形如下。
波形说明:a)芯片输入波形中,红色为sin输入信号,黄色为cos输入信号;b)时序信号输入波形中,从上至下信号分别为:DATA(紫色),SCLK(红色),SAMPLE(灰色),CS(蓝色)。
单端PWM控制器NCP1205及其应用

单端 PWM 控制器 NCP1205 及其应用 摘要NCP1205是安森美公司采用先进技术生产的一种单端脉 冲宽度调制控制器。
该控制器可保证在任何负载/线路条件下的完全继续传导模式 CM 和准谐振 DQR 操作,同时,该器件还组合了一个真正的电流模式控制调制器和一个退磁检测器。
文中介绍了NCP1205PWM控制芯片的基本结构、工作原理和 主要特点,给出了它的典型应用电路。
关键词;;频率软折弯;控制器;1205 1概述 NCP1205是安森美公司生产的一种先进的单端PWM控制器。
其应用领域主要包括较大功率笔记本电脑用AD/DC适配器、脱机 电池充电器和DVD、CD唱机、TVS、机顶盒STB等系统的开关电 流SMPS及USB中的辅助电源等。
NCP1205以准谐振QR操作和频率软折弯为主要特征。
QR操作也是临界传导操作,可以保证功率MOSFET在最小的漏 -漏极电压上完成开关亦称作谷值开关。
NCP1205采用平滑频率减小技术,是低功率SMPS集成管理方面的一个重要创新。
由于NCP1205有变频模式VFM,因此当输出功率要求减小时, 可以在不变的峰值电流上降低它的工作频率。
NCP1205通过谷值开关与软频率折弯特性相结合的方法可保 证实现最低的开关损耗,同时可在无载条件操作时从电网吸取最低的功率, 此外还可以保证具有最小的EMI。
2引脚功能和结构特点 2.1引脚功能 NCP1205采用8脚PDIPNCP1205、14脚PDIP NCP1205SP2和16脚SONCP1205DR23种封装形 式,表1给出了14脚PDIP封装的引脚功能说明。
表 112052 的引脚功能 脚号引脚名称功能描述 1 连接已整流的高压总线,便在启动时对外部 大容量电容提供充电通路 2、7、8、9、14 未连接 3 零初级电流检测,自 由振荡下操作可保证主开关重新启动 4 反馈信号输入,用于控制 5 与地之 间连接一只电容器可设定最小最大工作频率 6 过电压保护输入,门限电平 是 2810 接地 11 电流检测输入 12 栅极驱动输出 13 正电流电压施加端 2.2结构特点 NCP1205虽然采用三种封装形式,但片内结构和电路组成基本 相同。
AD2S1210器件手册_简中
描述 时钟输入的频率
TMIN,TMAX时的限制值 6.144
时钟周期(=1/fCLKIN)
——— ———
RD/CS 低前的A0 和A1 的设置时间 —C—S—下降沿到W— —R— /—F—S—Y—N——C—上升沿滞后 一个写周期内的地址/数据设置时间 一个写周期内的地址/数据保持时间
10.24 98 163 2 22 3 2
ms ms ms ms
Vp-p
V kHz mV mV dB
V ppm/℃ Db
V V
V V V V µA
µA
µA
V V V µA
µA
调整至±2LSB 内,CLKIN = 8.192 MHz 调整至±2LSB 内,CLKIN = 8.192 MHz 调整至±2LSB 内,CLKIN = 8.192 MHz 调整至±2LSB 内,CLKIN = 8.192 MHz 负载±100µA,典型差分输入
17 21 33 6
36 37 29 3
16 26 29
24 18
单位 最低,MHz 最高,MHz 最小,ns 最大,ns 最小,ns 最小,ns 最小,ns 最小,ns
——— ———
RD/CS 低时A0 和A1 置位到数据可用时间
VDRIVE=4.5V至 5.25V
VDRIVE=2.7V至 3.6V
VDRIVE=2.3V至 2.7V
— — — ———————
WR/FSYNC下降沿到SCLK上升沿滞后
— — — ———————
WR/FSYNC下降沿到SDO从高阻释放的滞后
参数 fCLKIN
tCK
t1 t2 t3 t4 t5 t6 t7 t8 t9 t10 t11 t12
电子元器件应用-AMC1210在旋转变压器电机控制系统中的应用

Figure 1. Basic Resolver Diagram (with Associated Signals) 图1:基本旋转变压器结构图(包括相关信号) Figure 1. Basic Resolver Diagram (with Associated Signals) The two outputs of the resolver can be fed directly to the ADS1205. The ADS1205 is a 10MHz, 2nd-order 变压器的两个输出可以直接反馈到 。ADS1205 是一个 ,DS增量解调器可以分辨率精确到 ADS1205 delta-sigma modulator capable of accurate resolutions up to 1610MHz bits. Delta-sigma (∆Σ) modulators output a The two outputs ofa the resolver can be fed directly to 的与输入速度成比例的比特流,用数字滤波过滤这些 the ADS1205. The ADS1205 is a 10MHz, bitstream that has ratio of 0s to 1s that is proportional to the input voltage. By digitally filtering 2nd-order these 。 积分三角调变器 输出一个比率在 到 16bits ( ) 0s 1s delta-sigma modulator capable of accurate resolutions up to 16 bits. Delta-sigma ( ∆Σ ) modulators output bitstreams, a digital word can be generated that represents the input voltage. The ADS1205 outputs can a 比特流,可以产生一个数字来代表输入速度。 的两个输入从而完 ADS1205的输出可以直接反馈到 AMC1210 bitstream that has a ratio of 0s to 1s that is proportional to the input voltage. By digitally filtering these be fed directly to two of the AMC1210 inputs in order to perform the digital filtering. See Figure 2. bitstreams, a digital word can be generated that represents the input voltage. The ADS1205 outputs can 成数字滤波。见图 2。 be fed directly to two of the AMC1210 inputs in order to perform the digital filtering. See Figure 2. AMC1210
基于AD2S1210的永磁同步电机转子位置及速度检测电路设计
基于AD2S1210的永磁同步电机转子位置及速度检测电路设计倪有鹏;胡清科【摘要】A circuit scheme for detecting rotors′position and speed is proposed in this paper .U‐sing decoder chip AD2S1210 as theprocessor ,and YS52XFW9753 resolver ,produced by Shanghai YingShuang Motor Ltd .,as a sensor ,a peripheral circuit is built .Incentives signals are provided to the resolver by AD2S1210 ,and its feedback signal is decodedto obtain the rotor position and speed of 16‐bit binary code ,which are detected by DSP28335 and resolver in this paper .The test results showthat the design has a good performance ,and can achieve real‐time detection of the rotors′position and speed .%设计了一种用于检测电机转子位置及速度的电路方案,此方案基于AD2S1210解码芯片作为处理器搭建外围电路,采用上海赢双电机有限公司生产的YS52XFW9753旋转变压器作为传感器。
通过AD2S1210给旋转变压器提供激励信号,并对其回馈信号进行解码,得到电机转子位置及速度的16位二进制码。
采用DSP28335及永磁同步电机对设计方案进行了检测,测试结果表明该设计性能良好,可实时实现电机转子位置和速度的检测。
2阶Δ-∑调节器ADS1202的原理和应用

2阶Δ-∑调节器ADS1202的原理和应用2阶Δ-∑调节器ADS1202的原理和应用摘要:ADS1202是美国德州仪器公司(TI)生产的1-Bit10MHz2阶Δ-∑精密信号调节器芯片。
文中详细介绍了ADS1202的技术特点、内部结构、工作原理和实际应用方法,同时提高了在设计电路时使用ADS1202需要特别注意的技术问题。
关键词:Δ-∑精密调节器A/D变换测量ADS1202 1概述ADS1202是一种高精度、80dB动态范围的Δ-∑调节器,其工作电源为+5V。
该芯片的差分输入端可直接与传感器或低电平信号相连,并具有合适的数字滤波器和调制速率,可以完成16-bit模数变换(A/D),而且不会遗漏代码。
在调节速率为10MHz、数字滤波器带宽为10kHz情况下,该器件可保持12bit的有效分辨率。
ADS1202适合用于中等分辨率的测量,其应用领域包括:电机电枢电流测量、通用电流测量、精密转换测量、工业过程控制、重量测量、印刷和便携仪器、压力传感器测量等。
2主要特性及内部结构ADS1202是单通道、2阶、CMOS模拟调节器,主要特性如下:*具有16bit分辨率;*具有13bit线性度;*具有分辨率/速度交替切换功能:10bit 有效分辨率时具有20μs的信号延迟;12bit有效分辨率时具有77μs的信号延迟;*使用5V单电源是的输入范围为±250mV;*增益误差为2%;*具有四种不同方式的串行接口;*可由分解相位或曼彻斯特译码实现成对的二进制译码,适用于一线接口连接。
ADS1202采用8脚TSSOP封装,其外形和管脚排列图1所示,各管脚的功能如表1所列,由于ESD可能造成器件损坏,故在使用时要采取适当的防范措施。
表1管脚功能管脚号管脚名管脚功能1MO 方式输入2VIN+同相模拟输入端3VIN-反相模拟输入端4M1方式输入5GND电源地6MDAT调制器数据输出端7MCLK调制器时钟输入或输出8VDD电源、+5V ADS1202的内部电路结构如图2所示,从图中可以看出:该芯片由2阶Δ-∑调节器、20MHz的RC振荡器、接口电路、2.5基准电压源以及一个缓冲器组成。
雷达伺服中双通道旋变测角系统的设计

雷达伺服中双通道旋变测角系统的设计曹晖;胡卫鹏【摘要】本文基于可编程逻辑器件FPGA-XC3S200A,采用了新型旋变解码芯片AD2S1210,设计了双通道旋转变压器解调的接口电路,并研究了双通道旋变解调的数字处理方法.该设计充分利用了AD2 S1210集激磁和解调为一身的特点,极大地简化了外部接口电路.实践证明该信号采集系统不仅能完全满足双通道旋转变压器测角系统的需要,同时还具有精度高,可靠性高,成本低,抗干扰能力强等优点.【期刊名称】《火控雷达技术》【年(卷),期】2017(046)003【总页数】4页(P72-75)【关键词】旋转变压器;双通道;FPGA;AD2S1210【作者】曹晖;胡卫鹏【作者单位】西安电子工程研究所西安 710100;西安电子工程研究所西安710100【正文语种】中文【中图分类】TN957测角系统的运动精度和响应速度直接影响到雷达定位和跟踪目标的准确性。
测角系统常用的位置传感器有旋转变压器(简称旋变)和光电码盘。
相比光电码盘,旋变常应用于在某些工作环境恶劣的场合,如具有高震动,严寒、潮湿、高速等等。
双通道旋转变压器是将两个极对数不等的旋转变压器合在一起。
通常极对数少的称为粗机,而极对数多的称为精机。
当转子旋转一周时,副边输出的两种不同频率的正弦波电压信号,构成粗精双通道系统。
在激磁绕组输入正弦电压Uref后,在粗通道的定子绕组感应输出两组出正余弦电压Uc_sin,Uc_cos;在精通道的定子绕组感应子绕组感应输出两组正余弦电压Uf_sin,Uf_cos。
测角系统根据Uref、Uf_sin和Uf_sin三者的关系来计算出旋变相应的角位置信息。
R/D(旋变/数字)转换芯片是专门针对旋变测角系统设计的。
通用的R/D芯片需要外部励磁电路产生激磁电压Uref,而新型R/D——AD2S1210不仅可以进行R/D 转换,而且可自产生激磁电压Uref,极大简化了外围电路。
其主要工作特性和参数为:①+5V单电源供电,逻辑接口电压可兼容+2.3 V至+5 V;②10位/12位/14位/16位多种分辨率供用户选择,最大跟踪速率为3125 rps,精度最高可达±2.5弧分;③内置可编程正弦波晶振器,可以将激励频率设置为2 kHz至20kHz范围内的多个标准频率;④同时具有串行通讯和并行两种对外数据接口;⑤可以选择输出绝对位置与速度信息。
旋转电机设计
旋转电机设计目录1、旋转变压器简介............................................................ 错误!未定义书签。
2、旋转变压器的工作原理................................................ 错误!未定义书签。
2.1旋转变压器角度位置伺服控制系统 .................. 错误!未定义书签。
2.2 工作原理.............................................................. 错误!未定义书签。
3、旋转变压器的基本结构................................................ 错误!未定义书签。
4、设计内容........................................................................ 错误!未定义书签。
4.1 额定容量的确定.................................................. 错误!未定义书签。
4.2 铁心尺寸的选定.................................................. 错误!未定义书签。
4.3 绕组的匝数与导线直径...................................... 错误!未定义书签。
5、实例计算........................................................................ 错误!未定义书签。
6、结论................................................................................ 错误!未定义书签。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
出电压 ( s 3 一 S I ,s 2 . s 4)的 计 算 公式 均 相 同 ,
I 3一S1= E0s i n c o tX s i n 2一 S4= E 0 l s i nc ot ×C O S
分别经过 A D采样 后送入 乘法器,分别经过乘 法运算,转换器将产 生反馈角 ( p 与输入角 0 、
电机 控制 系统 及 车辆环 境 的应 用
要 求。
反馈角 0 与输入 角 ( p 相 比较 ,当转换器正确跟
踪输入角度 时,二者之 间的误 差将 为 0 ,为 了 测量 误差 ,将 s 3 一 S l 乘以c o s  ̄ p , 将s 2 . s 4乘 S 1 ) c 0 s = E 0 s i n ∞ t s i n e c o s ( p ( S 2一S 4 ) s i n c p =E 0 s i n ∞ t c 0 s 0 s i n
司的 A U6 8 0 2 N1系 列 等 。 其 中 AD2 S 1 2 0 5是
当角度误差 0 一 值很小时 ,有: E 0 s i n ( 0 一( p ) ≈E O ( 0~( p 1 则E 0 ( 0 一( p ) 值表示 转子 的角度 误有效 期 与转换器 的数字角度输 出二者的差值 。
一
上海 赢双 电机 公司 的三 对极 旋转变 压 器,旋
变 的 转 子 转 动 一 周, 其 电角 度 变 化 为 1 0 8 0 度,其变压 比为 0 . 2 8 6  ̄ 1 0 %,激励频 率范围为 1 0 K Hz~ 2 0 K Hz ,激励 电压峰 一 峰值为 2 0 V,
介 绍 了 一 种 适 用 于 新 能 源 汽 车 交流异 步 电机转 子位 置解 码 系统 的设 计方 案,应 用旋 转 变压
器 /数 字 转 换 器 A D 2 S 1 2 O 5 , 将 旋 转 变 压 器 输 出 的 模 拟 信 号 转 化 为数 字 信号 ,以 便 于 D S P进行 处 理 。介 绍 了旋 转 变压 器 的基 本原 理,设 计 了A D 2 S I 2 O 5与 旋 转 变 压 器及T M S 3 2 0 F 2 8 3 3 5数 字 信 号 处理 器的接 口电路, 肼 并 在 安 凯 H F F 6 1 4 0 K 0 7 C H E V插 电 式 混 合 动 力
初级绕组采用交流基准源激励,随后在定子次
级绕组上耦合的幅度是转子轴相对于定子的函 数。因此,旋变产生 由轴角的正弦和余弦调制
二者的差值为:
E 0 s i n ∞ t x ( s i n e c o s 一c o s 0 s i n  ̄ 0 )
利用 内部 产生 的合 成基 准信 号来解 设 该
昏州
s 1 占
V b
恒 定速 度输 入 ,输 出连 续跟 踪变 变位 置不 存
在 固有误差。无 需外部 转换和等待状态 , 且 没 有 转 换延 迟。它还 可 以抑 制噪 声,并 提供 参 考 和输 入信 号 的谐波 失真 容限 。从而 提高 精 度 ,当旋 变的位置 经过 最低有 效位的角度时 , AD2 S 1 2 0 5输 出 1 L S B的分辩率 。 转 换器跟踪轴角 的原理为:由 E XC、 激励 源 向旋 转变压 器提供 励磁信 号,承 载着位置信息的两路旋转变压器模拟信号送入
信号,得到下式: E 0 ( s i n 0 c o s ( p —c o s e s i n ) = E 0 s i n ( 0一( p )
旋 转变 压器 是一 种能 输 出与转子 转角 或 位置成某种函数关系电信号的交流微特电机,
主 要 应用 于 角度 位 置 伺 服 控 制 系 统 或 运 动 伺 服
运 动伺服 控制系统的控制性能,在电机控制领 域得 到了广泛应用。旋转变压器与数字解码 芯 片相 结合 实现角度位置 和速度 信号解 码。 目前 常 用到 的 旋变数 字解 码 芯片主 要是 美 国 ADI 公司 的 A D2 S 9 0 、AD2 S 1 2 x x或 日本 多摩川 公
的两 个 输 出 电压 S 3 . S 1 ,s 2 . s 4 , 旋 变 输 出 信 号 格 式 如 图 2所 示 。
控制 系统中,作为角度位置的传感和测量用,
其 可 以 用 来 精 确 测 量 转 子 位 置 信 号 , 从 而 提 高
本设 计 的旋转变 压器 采用 日本 多摩 川或
到解码电路的 S I N、 S I NL、 COS 、 C OS L输 入 端 。
m
占 s 3
sI *碍 J Si n ( q
客 车 上投 入使 用 ,取 得 了非 常好
露 船
即
图 1 :可 变磁 阻旋 变
的 实 际 应 用 效 果 。 实验 证 明 , 该 设 计 方 法精度 高,可 靠性好 ,抗 干扰 能 力强 ,完全 能够 满足 高速
式 中,0为 转子 转 角 ,s i n c o t 为 转子 激 励 频率 ,E n 激 励幅 度 。旋 转变 压器 的两 个转 子
绕组 机械 错位 9 0 。 , 如 图 l所 示 。 其 中 vn 为
励 磁 电压 峰值 ,V r 为励 磁 电压,v 为 变 比后 【 关键 词 】旋 转 变压 器 A D 2 S 1 2 0 5 信 号转换 数 字解 码 器 的 电压, 、 vh 分别为 S 2 . s 4 , S 3 . S 1 感应 电压 ,
汽车 电子 ・ A u t o mo t i v e E l e c t r o n i c s
旋 变解码 芯片 A D 2 S 1 2 0 5应用系统设计
文/ 吴 成加 赵 圣宝
V r v D*S i n (
AD2 S 1 2 1 0按 照跟 踪 闭环 原 理 ,能 跟 踪