车用磁阻式旋变解码器及其校正算法研究
车用磁阻式旋转变压器的开发与评估
- 55 -工 业 技 术0 引言车用磁阻式旋转变压器是指转子凸极径向磁路磁阻式旋转变压器(简称旋变)。
该旋变的定转子分离,定子上绕有励磁绕组和正余弦输出信号绕组,转子凸极正弦化。
极对数越多,电气误差越小,2对极的电气误差≤±60°(机械角度),与轴角变换电路结合,广泛应用于伺服系统。
作为一种无刷、抗干扰、耐震动、适合苛刻环境使用的绝对位置传感器,是新能源永磁电机系统的关键零部件之一。
用于实时检测转子位置,从而实现转子磁场的定向矢量控制。
分布式绕组定子的电机,要求旋变电气误差小;集中式绕组定子的电机,允许旋变电气误差稍大。
日本多摩川公司生产的旋变抗干扰强,高速性能稳定,在国内得到了广泛应用。
1 项目背景该公司的电机用旋变主要从日本多摩川公司采购,部分从国内赢双公司采购。
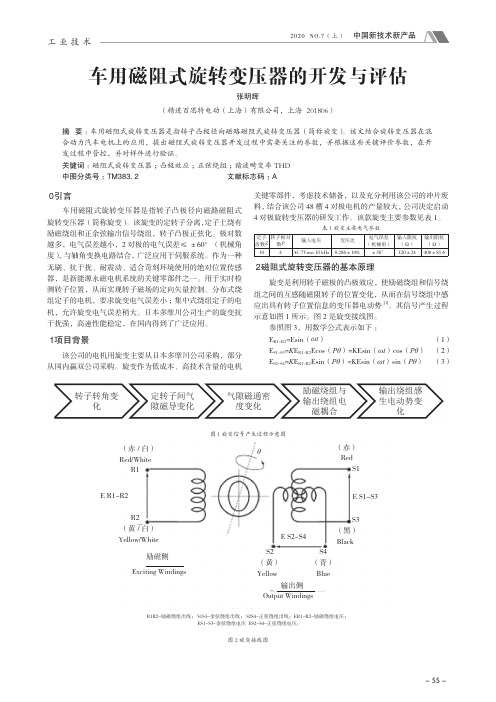
旋变作为低成本、高技术含量的电机关键零部件,考虑技术储备,以及充分利用该公司的冲片废料,结合该公司48槽4对极电机的产量较大,公司决定启动4对极旋转变压器的研发工作。
该款旋变主要参数见表1。
表1旋变主要电气参数定子齿数Z 转子极对数P 输入电压变压比电气误差(机械角)输入阻抗 (Ω)输出阻抗 (Ω)104AC 7Vrms 10 kHz0.286±10%±30’120±24408±81.62 磁阻式旋转变压器的基本原理旋变是利用转子磁极的凸极效应,使励磁绕组和信号绕组之间的互感随磁阻转子的位置变化,从而在信号绕组中感应出具有转子位置信息的变压器电动势[1]。
其信号产生过程示意如图1所示。
图2是旋变接线图。
参照图3,用数学公式表示如下:E R1-R2=Esin(ωt ) (1)E S1-S3=K E R1-R2Ecos(Pθ)=KEsin(ωt )cos(Pθ) (2)ES2-S4=K E R1-R2Esin(Pθ)=KEsin(ωt )sin(Pθ) (3)车用磁阻式旋转变压器的开发与评估张明辉(精进百思特电动(上海)有限公司,上海 201806)摘 要:车用磁阻式旋转变压器是指转子凸极径向磁路磁阻式旋转变压器(简称旋变)。
车用磁阻式旋变解码器及其校正算法研究
u = ui O 。C S& 一 u。 i sn& =
o k E s ti O O &一k E sn (t o i = U i w sn t S mn C U i . c sasn &
行 试 验验 证 。
f i 一i s n = mn it s n t o
L U
=
o。
() 1
k C S(sn ∞ UE O  ̄ i
式 中 :— —旋 转 变压 器 的变 比 ;
— —
激 磁 电压 幅值 ;
—
—
旋转 变 压器 位置 角 。
1 磁 阻 式旋 变 解 码 算 法
未 得 到广 泛应 用 。随着 计算 机 、 限元 数 值 仿 真 有 计算 、 测试 和控 制等 技术 的发 展 , 阻式旋 转 变压 磁
器 得 到 了迅 速发 展 。2 O世 纪 9 O年 代 , a sl a H ne n m 教 授分 析讨 论 了旋 转 变 压 器 的精 度 要 求 , 以及 几 种 非线 性旋 变信 号对 于精 度 的影 响 _ , 出一种 l 提
迫 扎 与控 制 应 同 21, 1 ) 01 8(2 3
研究与设计 E c MA
车 用 磁 阻式 旋 变解 码 器 及 其校 正 算 法 研 究 米
黄苏 融 , 罗 志武 , 王 爽 , 王维辰
( 海 大 学 机 电工程 与 自动化 学院 , 海 上 上摘Leabharlann 20 7 ) 0 0 2
国 Aso aakt 等 人 提 出 磁 阻 式 结 构 旋 转 变 hkN grai t
基于新型磁阻式旋转变压器解码问题研究
rive and control
基于新型磁阻式旋转变压器解码问题研究
刘继磊,杨 毅,高志民
( 中国船舶集团有限公司第七○四研究所,上海 200031)
摘 要:为满足数字化交流伺服系统位置反馈的性能要求,在介绍新型磁阻式旋转变压器工作原理的基础上,
新型磁阻式旋转变压器是一种利用转子凸极
效应,产 生 感 应 电 势 的 高 精 度 角 位 置 传 感 电 机。
1 新型磁阻式旋转变压器的工作原理
它具有结构简单、安装方便、制造成本低和精度高
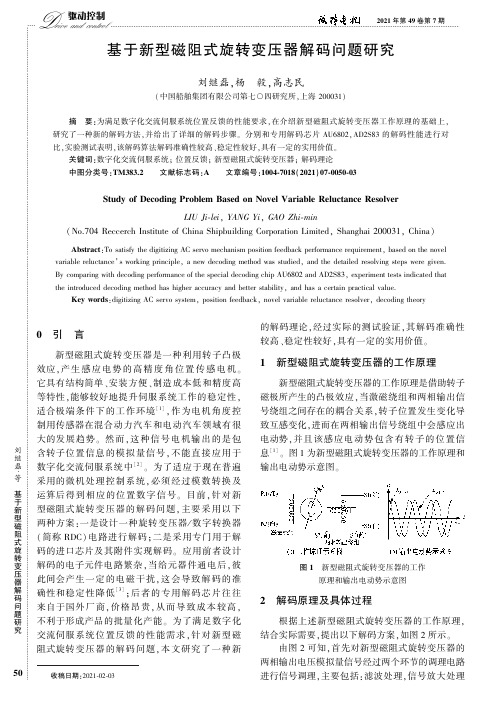
新型磁阻式旋转变压器的工作原理是借助转子
等特性,能够较好地提升伺服系统工作的稳定性,
磁极所产生的凸极效应,当激磁绕组和两相输出信
研究了一种新的解码方法,并给出了详细的解码步骤。 分别和专用解码芯片 AU6802,AD2S83 的解码性能进行对
比,实验测试表明,该解码算法解码准确性较高、稳定性较好,具有一定的实用价值。
关键词:数字化交流伺服系统; 位置反馈; 新型磁阻式旋转变压器; 解码理论
中图分类号:TM383.2 文献标志码:A 文章编号:1004⁃7018(2021)07⁃0050⁃03
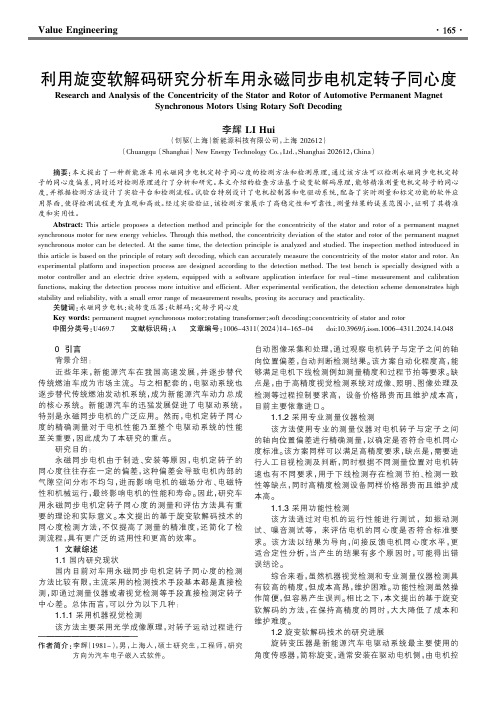
0 ~ 45°
45° ~ 90°
1 023-D
1 536 ~ 2 047
2 047-D
180° ~ 225°
2 048 ~ 2 559
6
225° ~ 270°
8
512 ~ 1 023
1 024 ~ 1 535
135° ~ 180°
7
计算公式
0 ~ 511
90° ~ 135°
4
5
解码数字
270° ~ 315°
多摩川磁阻式旋变产品手册
多摩川公司磁阻式旋变产品手册目录1. 引言2. 产品概述3. 技术规格4. 产品特点5. 安装和使用指南6. 故障排除7. 常见问题解答8. 保养与维护9. 市场应用及案例分析10. 联系我们1. 引言欢迎阅读多摩川公司的磁阻式旋变产品手册。
本手册将为您提供关于我们磁阻式旋变产品的详细信息,包括技术规格、产品特点、安装和使用指南,以及常见问题解答等。
2. 产品概述多摩川公司磁阻式旋变是一种高品质的旋转传感器,采用磁敏电阻原理,能够准确测量角位移,并将其转换为电信号输出。
我们的磁阻式旋变产品具有高精度、高可靠性和长寿命等优点,广泛应用于工业自动化、机械控制和仪器仪表等领域。
3. 技术规格我们的磁阻式旋变产品具有以下技术规格:- 角度范围:0~360度- 分辨率:0.1度- 输出信号:模拟电压信号- 零点偏移:±0.5度- 工作温度:-40~85摄氏度- 输入电源:5V直流电源更详细的技术规格请参考产品说明书。
4. 产品特点- 高精度:我们的磁阻式旋变产品采用先进的磁敏电阻技术,能够实现高精度的角度测量,满足各种应用需求。
- 高可靠性:通过精心设计和严格生产流程,我们的产品具有高可靠性和稳定性,能够长时间稳定地工作。
- 长寿命:采用优质材料和先进制造工艺,我们的产品具有长寿命,可满足各种复杂环境下的使用。
- 易于安装:我们的磁阻式旋变产品提供多种安装方式,适用于不同的安装需求。
5. 安装和使用指南在安装和使用磁阻式旋变产品之前,请确保按照以下步骤进行操作:- 选择适当的安装方式,并将产品固定在合适的位置。
- 连接产品的电源和信号线。
- 根据产品说明书设置合适的参数。
- 在使用过程中,避免过度扭曲或碰撞产品,以免影响其准确性和精度。
6. 故障排除本章节将为您提供一些常见故障的诊断和解决方法,以帮助您解决可能遇到的问题。
7. 常见问题解答在此章节,我们列举了一些经常被用户问到的问题,并给出了详细的解答。
基于CORDIC的旋转变压器解码算法研究

yn =
r sin kn
( 2)
zn 0
定向模式是直角表示向极化表示的转换, 已知的初始
条件为 x 0 = x , y0 = y , z 0 = 0, 旋转方向由 y i 控制,
- 1 y > 0 ( 逆时针旋转)
di = - sgn( yi ) = 1
y < 0 ( 顺时针旋转)
定向模式的最终结果用下列方程表示:
Decoding algorithm of resolvers based on CORDIC
Song Xiaomei Zhu Hui W ang W enjing ( S chool of Elect ronics & Inf ormat ion, X i an Polyt echni c U nivers it y, X i an 710048)
1 旋转变压器的基本原理
旋转变压器[4] ( 简称旋变) 是一种输出电压随转子转 角变化的信号元件。当励磁绕组以一定频率的交流电压 励磁时, 输出绕组的电压幅值与转子转角成正、余弦函数 关系, 或保持某一比例关系, 或在一定转角范围内与转角 成线性关系。
按输出电压与转子转角间的函数关系, 旋转变压器主 要分 3 类: 正余弦旋转变压器、线性旋转变压器、比例式旋 转变压器。在本文中介绍的解码算法主要是针对正余弦 旋转变压器, 如图 1 所示。
宋晓梅 等: 基于 CORDIC 的旋转变压器解码算法研究
第6期
r 1 = U0sin t 1 , r2 = U0sin t 2 , 如图 5 所示, 而 r 变化只是 对模长的大小发生了改变, 对角度解码没有任何影响, 旋 变信号的解码, 只要得到的是正确的角度值, 模长的大小 可以不做考虑。
基于新型磁编码器的快速解算方法研究
采用 霍尔 效应 原 理 , 用集 成 电路 制 造 技 术 的 新 利
扰 , 接影 响 解 码 的精 度 ; 者 解 码 芯 片 价 格 比较 昂 直 后
型磁编码器是一种新 型电磁器 件 , 具有精 度高 、 积 体 小 、 量轻 、 干扰 能 力 强 以及 可 维 护 性好 等优 点 , 重 抗 同 时它可以提供绝对值 串行输 出、 WM 输 出和增量输 P 出。由于采用无接触式检测方式 、 封闭式结构 , 在工作 环 境严 酷 的场所 应用 非 常 理 想 , 够 耐 受 磁 铁位 置 偏 能 离和气隙变动情况 , 不必进行温度补偿 , 无需校准 。基 于上述优点 , 在高精度测量和控制领域中, 新型磁编码 器 已成 为不 可缺少 的组成 部分 。 有 关新 型磁 编码 器 的解码 目前主要 有 以下两 种方 法 : 利 用 电子器 件设计 解 码 电路 ; 利 用 解码 芯 片 ① ② 及其 组件 直 接进 行 解 码 。前 者解 码 电路 比较 复 杂 , 而 且 电子器 件 之 间 在 上 电 时 往 往 会 存 在 很 强 的 电 磁 干
h sc ran r fr n e sg i c n e a e ti e e e c i nf a c 。 i
Ke r s a gep s in v lc ̄ me sr me t n w g ei n o e ; e o igag r h p st nfe b c y wo d : n l o io / eo i t au e n ; e ma n t e c d r d c dn loi m; io d a k c t o i e
Absr c : n t ef u dain o n rdu i heWO3 ̄ rncp e o e ma n ts e c d r b s d o heln a t a t I h o n to fi to cngt 1 Sp K i i l fa n w g eim n o e , a e n t i e r
旋变解码器磁编直驱电机驱动器 磁阻式旋变测试系统 使用说明书

磁阻式旋变检测设备磁阻式旋变测试系统使用说明书磁阻式旋变测试系统使用说明书1概述磁阻式旋变测试系统(以下简称测试系统)用于磁阻式旋变生产过程中的自动化检测,能够提高检测效率并且减少人工成本。
测试系统用于磁阻式旋变的电气性能指标测试,能够测量旋变的电气误差、变压比、输入阻抗、输出阻抗等技术指标。
2测试系统结构采用一体式机柜的形式,全部组件都放置在机柜内部,比如示波器、一体式计算机、测控箱、测试台架、打印机等。
示波器:用于实时显示旋变激励信号、旋变正弦信号、旋变余弦信号的波形,可以通过示波器观察旋变的工作状态、计算旋变的相位移、计算旋变的变压比等。
一体式计算机:用于运行测试系统上位机软件,上位机软件通过高速CAN总线与测控箱进行数据通讯,能够显示测试台架当前的分度角度,能够显示旋变当前的角位置,能够显示当前的变压比等。
测控箱:功能如下1)给旋变提供10KHz的激励信号,并且接收旋变反馈的正余弦信号,通过信号处理电路处理后,变换成数字量的角位置信号;2)驱动测试台架分度电机,根据上位机的控制指令,主要完成归原点和电气误差测试;3)接收脚踏开关的控制信号,完成指定动作(归原点和电气误差测试);测试台架:用于为分装式旋变定转子提供支撑;打印机:用于打印测试报告;31)旋变零位定位功能:控制伺服电机带动旋变转子旋转,查找并定位旋变的电气零位。
2)旋变电气误差检测功能:单圈位置检测点的个数为720个(0.5度机械角记录一个数据点),能够显示测试误差曲线、输出测试结果以及记录测试数据。
3)数据记录功能:将产品名称、产品编号、检测结果和测试时间等数据记录在数据库中。
4)数据查看功能:能够查看今天、本周、本月、本年以及自定义时间段的测试数据,并提供误差曲线回显功能。
5)打印报告功能:能够打印检测报告。
4分度精度:小于1′(角分),详见附录分度平台精度检测报告章节;分度分辨率:约1.3″(角秒),详见附录分度平台分辨率设计选型章节;测试数据记录:720点/机械圈,即0.5度记录一个数据点;寻零时间:小于20秒/次;测试时间:小于20秒/次;5设备前面板控制面板,如下图所示:从左至右依次为:总电源(旋钮开关)、电脑电源(旋钮开关)、220V指示(指示灯)、寻零(按钮)、测试(按钮)、状态1(指示灯)、状态2(指示灯)、伺服报警(蜂鸣器)、伺服急停(急停开关);总电源(旋钮开关):2档开关,控制整个设备的供电,关闭则整个设备断电、开启则整个设备通电。
利用旋变软解码研究分析车用永磁同步电机定转子同心度
0引言背景介绍:近些年来,新能源汽车在我国高速发展,并逐步替代传统燃油车成为市场主流。
与之相配套的,电驱动系统也逐步替代传统燃油发动机系统,成为新能源汽车动力总成的核心系统。
新能源汽车的迅猛发展促进了电驱动系统,特别是永磁同步电机的广泛应用。
然而,电机定转子同心度的精确测量对于电机性能乃至整个电驱动系统的性能至关重要,因此成为了本研究的重点。
研究目的:永磁同步电机由于制造、安装等原因,电机定转子的同心度往往存在一定的偏差,这种偏差会导致电机内部的气隙空间分布不均匀,进而影响电机的磁场分布、电磁特性和机械运行,最终影响电机的性能和寿命。
因此,研究车用永磁同步电机定转子同心度的测量和评估方法具有重要的理论和实际意义。
本文提出的基于旋变软解码技术的同心度检测方法,不仅提高了测量的精准度,还简化了检测流程,具有更广泛的适用性和更高的效率。
1文献综述1.1国内研究现状国内目前对车用永磁同步电机定转子同心度的检测方法比较有限,主流采用的检测技术手段基本都是直接检测,即通过测量仪器或者视觉检测等手段直接检测定转子中心差。
总体而言,可以分为以下几种:1.1.1采用机器视觉检测该方法主要采用光学成像原理,对转子运动过程进行自动图像采集和处理,通过观察电机转子与定子之间的轴向位置偏差,自动判断检测结果。
该方案自动化程度高,能够满足电机下线检测例如测量精度和过程节拍等要求。
缺点是,由于高精度视觉检测系统对成像、照明、图像处理及检测等过程控制要求高,设备价格昂贵而且维护成本高,目前主要依靠进口。
1.1.2采用专业测量仪器检测该方法使用专业的测量仪器对电机转子与定子之间的轴向位置偏差进行精确测量,以确定是否符合电机同心度标准。
该方案同样可以满足高精度要求,缺点是,需要进行人工目视检测及判断,同时根据不同测量位置对电机转速也有不同要求,用于下线检测存在检测节拍、检测一致性等缺点,同时高精度检测设备同样价格昂贵而且维护成本高。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
, 提出一种
参考无刷电机结构的磁阻式旋转变压器[3]。
* 基金项目: 863 节能与新能源汽车重大项目( 2008AA11A108 ) ; 上海市委科委国际合作项目( 08590710800 )
— 1 —
研究与设计EMCA
2011 , 38 ( 12 )
0
引
言
旋转变压器的定子和转子之间的磁通分布符 合正弦规律, 当激磁电压加到定子绕组上时, 通过 电磁耦合, 转子绕组产生感应电动势, 旋变解码器 的作用就是将转子绕组输出的感应电势转换成代 表转子轴角位置的数字信号。 目前, 旋变解码器 主要分为两种类型: 一种是专门的旋变转角数字 解码芯片, 例如美国模拟器件公司( Analog Device Inc) 生产的 AD2S80 系列和日本 Tamagawa 公司 生产的 AU6802N1[4] 等; 另一种是利用微处理器 及其外围电路等分离器件构建的解码器[5]。 专 用解码芯片具有体积小、 抗干扰能力强的封装特 性, 其价格较贵。 随着芯片加工技术的不断提高 和微电子技术的发展, 选用适当的低成本微处理 芯片来实现旋变解码器, 通过软件进行位置角解
在非理想情况下, 旋转变压器的加工精度造
成了两相输出绕组线圈不完全对称, 从而导致输 出正余弦信号不完全正交; 同时自感产生的恒定 分量不能完全消除, 旋转变压器定子开口槽等影 响都会使输出信号不理想。由于实际旋转变压器 输出信号与理想信号存在偏差, 则导致基于理想 条件下建立的解码算法产生角度转换误差 。当旋 转变压器两相绕组信号存在幅值不对称和不完全 正交时, 两相输出信号可表示为 = ( 1 + τ) kU E -m cos αsin ωt 式中: τ err — — —两 相 绕 组 信 号 不 完 全 正 交 误 差 系
算, 并可针对误差进行校正[6], 从而在降低系统 成本的同时保证位置解码精度, 这无论在理论研 究上还是产品开发方面都具有现实意义 。 本文设计了一种车用磁阻式旋变解码器, 包 括解码算法及软硬件实现, 通过定性分析非理想 状况下旋变两相绕组信号含有幅值不对称和不完 全正交误差分量对解码输出角度信号的影响, 设 计了相应的校正补偿模块, 最后通过搭建与专用 RDC 解码芯片性能对比的测试平台对该方案进 行试验验证。
当在旋转变压器的激磁绕组上施加频率为 ω 的高频交流激磁电压 U E = U E_m sin ωt 时, 旋转变 压器副边空间相差 90 ° 电角度的两相次级输出信 号绕组分别感应出与转子旋转角成正、 余弦关系 的电势信号为
= kU E_m cos αsin ωt 式中: k— — —旋转变压器的变比;
Abstract: Based on costas loop algorithm,the hardware and the software of a kind of resolvertodigital converter was designed. Throughout qualitative analyzed the influences of the output angle signal when the resolver contains amplitude imbalance and imperfect quadrature between the two output sin / cos signals,an error correction module was designed and the simulation analysis was given. For the research of steady performance and dynamic performance, setting up a performance comparison test platform between the RDC this article designed and AU6802. The experimental results verified the reliability of the design scheme. Key words: variablereluctance resolver; decoding circuit; error correction
{
积, 则可得到:
S1 = S2 =
∫ ∫
π 2P
0
π 2P
( α e + ρ err ) dα e ( 8) α e dα e
0
S1 为区间[ 0 ,π / 2 P] 上含有幅值不对称误 其中, 差分量 ρ err 的位置曲线与横坐标轴围成的面积, S2 为该区间内理想位置曲线与横坐标轴围成的面
π 2P π 2P
当误差系数 δ err = τ err α 很小时, cos δ err ≈ 1 , sin δ err ≈δ err , 则由式( 5 ) 得 ^ ) + δ err cos αcos α ^ - U' err = kU E -m[ sin ( α - α ^] ( 6) τcos αsin α 经过图 2 所示Ⅱ型闭环控制使得式( 6 ) 趋近 ^ 很小, 于零, 位置角误差 α err = α - α 因此 α err ≈ sin α err 。 由此可得到旋转变压器输出信号存在幅 值不对称和不完全正交时位置角误差为 α err ≈ δ err τ sin 2 P α e - ( 1 + cos 2 P α e ) = 2 2 ( 7)
摘 要: 基于考斯塔斯环路解码算法, 设计了一种车用磁阻式旋变解码电路, 并进行软硬件的设计与实
现。通过定性分析非理想状况下旋变两相绕组输出信号含有幅值不对称和不完全正交误差分量时, 对角度解 算的影响, 设计相应的校正模块, 并给予仿真分析 。搭建与专用解码芯片 AU6802 性能对比的测试平台, 对所 设计的旋变解码器进行稳态测角性能和动态性能的试验研究 。 试验结果验证了该旋变解码器设计方案的可 行性。 关键词: 磁阻式旋变; 解码电路; 误差校正 中图分类号: TM 301. 2 文献标志码: A 文章编号: 16736540 ( 2011 ) 12000106
π 2P
× sin 2 P α e
( 10 )
∫
0
sin 2 P α e dα e
ρ err + ε err 其中: α e — — —电角度, α e = αP M / P r ; Pr — — —旋变极对数; PM — — —电机极对数, P M / P r = P; — —幅值不对称误差分量; ρ err — — —不完全正交误差分量。 ε err —
图1
多极磁阻式正余弦旋变
图2
考斯塔斯环路基本算法原理框图
对该输出信号进行调制解调, 将高频信号低 通滤波后, 该输出信号变为 ^) U' err = kU E_m sin( α - α ( 3) 经过反馈闭环控制, U' err 值最终趋近于零, 可
— 2 —
^ 趋近于零。 最后通过积分和角 以近似认为 α - α 度翻转, 所得到 0 ~ 2 π 间变化信号即为旋变转角 ^。 位置估计信号 α
2011 , 38 ( 12 )
研与设计EMCA
2
旋变输出信号幅值不对称和不完全 正交引起解码误差的分析与校正
1
磁阻式旋变解码算法
多极磁阻式旋变中, 定子侧为初级激磁绕组
和两相正交次级信号绕组, 转子侧为与初级激磁 绕组和两相信号绕组磁通耦合的特殊结构凸极磁 极。3 个转子凸极、 定子 10 槽磁阻式旋变示意图 如图 1 所示, 定子槽内激磁绕组逐槽反向串接, 两 相输出绕组信号相位相差 π /2 电弧度。
Research of VariableReluctance Resolver to Digital Converter for Electric Vehicles and Error Correction Algorithm
HUANG Surong, LUO Zhiwu, WANG Shuang, WANG Weichen ( School of Mechatronics Engineering and Automation,Shanghai University,Shanghai 200072 ,China)
S3 = S1 - S2 =
∫ ∫
0
0
( α e + ρ err ) dα e - τ sin2 P α e dα e 2
∫
0
α e dα e = ( 9)
π 2P
S3 为图 3 ( a ) 所示平行线阴影部分的面积。 由式( 7 ) 和式( 9 ) 即可得到幅值不对称误差分量 ρ err 为 ρ err = S3
磁阻式旋转变压器作为无接触型传感器, 采 用无刷设计, 具有体积小、 结构简单、 可靠性好、 耐 冲击、 抗干扰能力强及适应高速运行的优点, 被广 泛应用于电动汽车的电驱动系统中。1986 年美 国 Ashok Nagarkatti 等人提出磁阻式结构旋转变 压器的概念, 由于当时设计技术条件的限制, 一直 未得到广泛应用。 随着计算机、 有限元数值仿真 计算、 测试和控制等技术的发展, 磁阻式旋转变压 器得到了迅速发展。20 世纪 90 年代, Hanselman 教授分析讨论了旋转变压器的精度要求, 以及几 种非线性旋变信号对于精度的影响
cos
( a) 含有幅值不对称误差分量 ( b) 含有不完全正交误差分量 图3 正、 余弦绕组信号含有误差分量时位置角波形
针对幅值不对称误差分量 ρ err , 由图 3 ( a ) 可 知:
{U
U sin = kU E -m sin( 1 + τ err ) αsin ωt
( 4)
数; — —两相绕组信号幅值不对称误差系数 。 τ— 由考斯塔斯环路基本算法经过推导可得出误 差信号: ^ - U err = kU E -m[ sin ( α + δ err ) cos α ^] ( 1 + τ) cos αsin α ( 5)