臂式斗轮堆取料机回转机构驱动功率的计算
悬臂式斗轮堆取料机悬臂胶带机参数计算
悬臂式斗轮堆取料机悬臂胶带机参数计算【摘要】本文论述了悬臂式斗轮堆取料机的工作原理,分别对悬臂胶带机的四种工况进行了计算,得出了悬臂胶带机所需设计参数。
【关键词】悬臂式斗轮堆取料机;悬臂胶带机1、前言随着科学工业技术的发展,悬臂式斗轮堆取料机在矿山、港口、冶金、电力行业等得到了广泛的应用。
悬臂式斗轮堆取料机完成两种作业方式,取料时,斗轮装置转动,臂架绕回转中心作往复回转运动,斗轮装置将物料取送到悬臂胶带机上,通过安装在回转平台及门座上的中心落料系统将物料卸到地面胶带机上,此时,尾车副车处于水平位置。
堆料时,尾车副车抬起,物料由地面胶带机经尾车副车卸料到尾车上,尾车再卸料到悬臂胶带机上,物料运至斗轮装置头部一端卸至料场。
2、悬臂式斗轮堆取料机技术参数某项目悬臂式斗轮堆取料机基础技术参数如下所示:输送物料:球团矿物料密度:2.2t/m3粒度:0-50mm 运量:堆:900t/h ,取:2000t/h带宽:1400mm 带速:2.5m/s水平机长:47.03m 倾角:上仰9°,下俯10°拉紧形式:重锤拉紧拉紧行程:s=1000mm3、悬臂胶带机技术参数计算由悬臂式斗轮堆取料机作业方式,可知悬臂胶带机的技术参数计算分为以下四个工况。
3.1工况一(取料,下俯10°,顺时针运行)悬臂胶带机圆周驱动力(1)f—模拟摩擦系数,f=0.03l—输送机长度,L=47.03mg—重力加速度,g=9.81m/s2qRO—承载托辊每米长旋转部分质量,qRU—回程分支托辊每米长旋转部分质量,qB—每米长输送带的质量,qG—每米长输送物料的质量,qSI—特种主要阻力,即托辊前倾摩擦阻力及导料槽摩擦阻力,由于胶带机没有采用前倾托辊,采用的是调心托辊,故不计算托辊的前倾摩擦阻力。
其中:μ2—承载、回程托辊和输送带间的摩擦系数,取μ2=0.6L—装有导料板的设备长度,L=4.5b1—导料板内部宽度,取b1=2/3B=0.39mFs2—特种附加阻力,即清扫器、卸料器及翻转回程分支输送带的阻力,N,由于悬臂胶带机只有4个清扫器,故其中:A—输送带和输送带清扫器的接触面积,A=0.021m2P—输送带清扫器和输送带间的压力,取u3—输送带和输送带清扫器间的摩擦系数,取u3=0.7FN—附加阻力,其中:FbA—在加料段、加速段输送物料和输送带间的惯性阻力及摩擦阻力,(其中V0=0)Ff—在加速段物料和导料槽挡板间的摩擦阻力,,其中F1—输送带经过滚筒的弯曲阻力,根据经验取经过传动滚筒时的弯曲阻力为500N,取经过改向滚筒时的弯曲阻力为400N,故,F1=900NFt—滚筒轴承阻力,根据经验取经过改向滚筒时的弯曲阻力500N,故Ft=500N故,圆周驱动力Fu为:其中:H=7.9m圆周力Fu通过摩擦传递到输送带上,为保证输送带工作时不打滑,需在回程带上保持最小张力F2式中:Fumax—满载输送机启动或制动时出现的最大圆周力,取;—尤拉公式,取=2.56为了限制输送带在两组承载托辊间的下垂度,作用在输送带上任意一点的最小张力Fmin为承载分支回程分支式中:输送带许用的最大下垂度应满足,则由上可取,由“逐点张力法”可得3.2工况二(取料,下俯10°,顺时针运行)悬臂胶带机圆周驱动力其中:模拟摩擦系数,满足输送带工作时不打滑满足承载分支下垂度,则由上可取,由“逐点张力法”可得,3.3工况三(堆料,上仰9°,逆时针运行)悬臂胶带机圆周驱动力其中:每米长输送物料的质量特种主要阻力附加阻力因此工况下悬臂胶带机运行形式为尾部驱动,则满足输送带工作时不打滑,满足承载分支下垂度,则此时,取,由“逐点张力法”可得,3.4工况四(堆料,下俯10°,逆时针运行)悬臂胶带机圆周驱动力因此工况下悬臂胶带机运行形式为尾部驱动,则满足输送带工作时不打滑,满足承载分支下垂度,则此时,取,由“逐点张力法”可得,3.5技术参数的确定由悬臂胶带机四种工况计算可得以下设计参数:(1)胶带最大张力,选择EP200X5(4.5+1.5);(2)圆周驱动力,则传动轴功率,需电机功率,所选电机功率为110KW;(3)驱动滚筒合张力为,取传动滚筒直径,则驱动滚筒扭矩;(4)改向滚筒合张力为;(5)悬臂胶带机采用垂直重锤拉紧形式,所以拉紧力4、结论悬臂式斗轮堆取料机悬臂胶带机技术参数的计算过程包含了胶带机上运、下运、头驱、尾驱典型形式计算,依据计算结果选择合理的配套件,为悬臂输送机的整机布置设计提供依据。
悬臂斗轮堆取料机总体设计及机构分析与优化设计 龚建民

悬臂斗轮堆取料机总体设计及机构分析与优化设计龚建民摘要:本文从设计要素、设计思路、整机稳定性、电气控制等方面介绍了悬臂斗轮堆取料机总体设计的要点。
叙述了主要机构的设计特点,着重介绍了整体稳定性的计算法。
关键词:斗轮堆取料机;总体设计;主要部件设计;设计质量保证一、悬臂斗轮堆取料机介绍悬臂斗轮堆取料机(简称斗轮机)主要包括斗轮机构、悬臂皮带机、俯仰机构、回转机构、行走机构、金属机构、尾车、电气、驾驶室、电气房和辅助设备(润滑系统、喷水系统、安全装置、检测装置、供电、照明)等。
斗轮机的型式按臂架平衡方式分,最常用的有两种机型:1.活动平衡式:即活动平衡架与斗轮臂架之间用刚性或柔性连杆联结,并绕各自的铰点摆动的平衡形式。
这种机型的优越之处在于斗轮臂架变幅时,整机的倾覆力矩变化很小,平衡效果及稳定性好。
特别适合大中型斗轮机。
如宁波港DQ1500/2000-50斗轮机(取料1500t/h,堆料2000t/h,回转取料半径50m)。
就是活动平衡式机型。
2.整体平衡式:平衡架与臂架绕同一回转中心摆动的平衡形式。
这种机型结构简单,平衡效果好,适合中小型斗轮机。
如南京钢厂DQ800/1200-30斗轮机(取料800t/h,堆料1200t/h,回转取料半径30m)。
采用的是整体平衡式机型。
二、总体设计1设计规范及标准斗轮机机型及机构类型虽然有它自身的特点,但参照《起重机设计规范》的分类法,基本上还是属于起重机设计的范畴,所以在规划总体设计时,作为起重运输设备有以下三个基本要素:(1)金属结构和机械零部件的强度、刚度和抗弯曲能力;(2)整机的抗倾覆稳定性;(3)满足作业性能要求的原动总功率。
2载荷计算分类及组合设计载荷计算类别时,按规范要考虑三种载荷的组合:(1)在正常工作情况下的正常载荷(第一类载荷组合)。
主要用于对整机的金属结构和零部件的疲劳、磨损、发热的计算,保证产品的使用寿命。
(2)在恶劣条件下工作的最大载荷(第二类载荷组合)。
四支腿臂式斗轮堆取料机轮压计算

四支腿臂式斗轮堆取料机轮压计算万正喜;胡庆泉【摘要】分析了斗轮堆取料机行走机构组成结构、受力及斗轮堆取料机的工况,在此基础上对行走机构进行轮压推导计算,并分析其极值的情况.%The paper analyzes the composition, force of the travelling mechanism for bucket-wheel stacker/reclaimer, and its working condition, for the purpose of calculation of wheel-pressure of the travelling mechanism, with further analysis of extreme condition.【期刊名称】《起重运输机械》【年(卷),期】2013(000)004【总页数】2页(P39-40)【关键词】斗轮堆取料机;行走机构;轮压;计算【作者】万正喜;胡庆泉【作者单位】湖南长重机器股份有限公司技术研发中心长沙410014【正文语种】中文【中图分类】U653.928.+5斗轮堆取料机是一种广泛应用于港口、电力、煤炭、冶金等行业的大型散料输送设备,按功能可分为斗轮堆料机、斗轮取料机和斗轮堆取料机,以下简称为斗轮机[1]。
由于斗轮机的整机质量为几百吨,因而一般采用轮轨式。
行走机构处于整机的最下面,为了保证整机的安全可靠性,要计算其轮压,使轮压满足设计和使用要求。
1 斗轮堆取料机工况分析对轮压进行计算,首先要了解行走机构的结构及斗轮堆取料机的工况。
斗轮堆取料机由众多的零部件组成,其运动工况比较复杂。
1.1 行走机构结构分析斗轮机机型众多,部件的结构形式也很多,但行走部分的结构形式相对比较成熟和固定。
行走机构由多组结构完全相同的行走台车与门座组成。
行走机构的支撑方式有三支腿支撑和四支腿支撑两种,所谓三支腿支撑是指在门座架下面有三组行走装置支撑整个设备[1];四只腿支撑是指在门座架下面有4组行走装置支撑整个设备,如图1所示。
臂式斗轮堆取料机斗轮机构的基本参数的确定
臂式斗轮堆取料机斗轮机构的基本参数的确定作者:李华业于闯业吴孝文来源:《消费导刊》2015年第07期摘要:臂式斗轮堆取料机是在斗轮挖掘机的基础上发展和派生出来的,它是一种高效的、连续的散料装卸设备。
本文介绍了臂式斗轮堆取料机的特点,讨论其基本参数的确定方法,旨在为我国臂式斗轮堆取料机斗轮机构的基本参数确定提供理论依据。
关键词:臂式斗轮机堆取料机斗轮机构基本参数一、臂式斗轮堆取料机概述及其特点臂式斗轮堆取料机是在斗轮挖掘机的基础上发展和派生出来的,它是一种高效的、连续的散料装卸设备。
它由斗轮机构、回转机构、带式输送机、尾车、俯仰与运行机构组成。
臂式斗轮堆取料机主要从事的是松散物料的堆料和取料,它与其他散料搬运设备相比,有以下特点:(一)可同时实现散料的堆料和取料。
臂式斗轮堆取料机在堆料时能够按照工艺要求向轨道两侧的条形料场自动堆料,堆料表面平整、形状规则、便于堆取料机、取料机连续取料;而在取料时又可以实现定量取料,能输出均匀连续的料流。
(二)可以大大节省作业时间。
臂式斗轮堆取料机可以利用行走机构按铺设的轨道在整个料场内运行,同时借助回转机构和俯仰机构可实现在料场内任一位置堆料和取料,可以大大缩短堆取料时间(三)有利于降低工人劳动强度。
由于臂式斗轮堆取料工作步骤规则,所以可以利于电脑和通讯设备实现信息化自动控制,大大降低工人的劳动强度,提高工厂的效率。
二、斗轮堆取料机斗轮机构的选型介绍(一)斗轮的结构型式分析斗轮分无格式和有格式两种。
无格式斗轮料斗是不设斗底的,而是在取料区域设置一个圆弧形的挡料板,通过料斗和圆弧形挡料板形成封闭贮料区间,进行正面卸料;有格式的斗轮是在每个料斗下面都设有一个扇形斜溜槽贮料斗,并在非卸料区设有固定不动的侧挡板,所以在卸料区进行侧面卸料。
(二)斗轮的布置型式分析斗轮装置分为短轴和长轴两种布置型式,斗轮体和驱动装置位于同侧的为短轴,位于皮带两侧的为长轴。
当采用短轴布置型式时,应该考虑悬臂前部的平衡问题,采取适当的方法减少斗轮重量偏心对悬臂梁的影响,如把悬臂设计成桁架结构,或皮带机按斜线布置使得斗轮位置尽量向悬臂中轴线靠近的等方法。
斗轮堆取料机总体设计概述

斗轮堆取料机总体设计概述[摘要]本文概述了斗轮堆取料机在我国的发展及现状、使用场合及工作原理、按作业要求可分成的几种机型。
从主参数确认,设计规范,整机的稳定性等方面阐述了斗轮堆取料机总体设计的要求。
着重介召了整机的稳定性及进行校核的计算方法。
【关键词】斗轮堆取料机;总体设计;主要参数;整机稳定性;保证设计质量我国从六十年代中期开始研究开发斗轮堆取料机。
八十年代以后,中国经济发展迅速,大批新港口、钢厂、电厂相继建成并投入使用,而钢厂和电厂的主要原料为煤炭或铁矿石。
1、斗轮堆取料机的作用及构成1.1斗轮堆取料机的特点斗轮堆取料机兼有起重,运输,挖掘机械的多重特性:(1)效率高,它将挖掘机构与运输机构有机组合在一起,前者取料,后者运输。
二者同时连续作业。
(2)能耗低,因为物料的运输采用阻力小的带式输送机,回转机构采用滚动轴承,所以斗轮机的动力消耗低。
(3)使用寿命长,由于机器在取料时冲击力小,零部件磨损小,特别是使用了耐磨材料,斗轮的磨损情况大为改善,延长了使用寿命。
(4)操作简便,以PLC控制为主,辅助CRT上位机,可实现自动控制。
1.2机构组成及工作原理整机主要由大车行走机构、门座、转台、中心料斗、回转机构、斗轮机构、俯仰机构、臂架带式输送机、上部钢结构、尾车等部件组成。
有堆料和取料两种工作方式。
1.3常用堆取料机的类型堆取料机按工作类型:可分为堆取料机、堆料机、取料机、混匀堆料机、混匀取料机、摇臂式堆料机等。
按机型:可分为桥式斗轮堆取料机、门式斗轮堆取料机、圆形料场堆取料机等。
2、斗轮机的总体设计2.1主参数确认和设计规范及标准主参数是斗轮堆取料机在现场作业时,应达到的各项技术指标的集合,是设备设计的重要依据,也是设备验收的量纲。
设计斗轮机可应用的标准有:《JB818-84带式运输机技术条件》、《GB3811-83起重设计规范》、《欧洲散货连续装卸机械设计规范》、《JB/T4119-94臂式斗轮堆取料机技术条件》、及其他相关标准,斗轮机机型及机构类型虽然有它自身的特点,但参照《起重机设计规范》的分类法,基本上还是属于起重机设计的范畴,所以在规划总体设计时,作为起重运输设备有以下三个基本要素:(1)金属结构和机械零部件的强度、刚度和抗弯曲能力;(2)整机的抗倾覆稳定性;(3)满足作业性能要求的原动总功率。
斗轮堆取料机斗轮的设计计算说明书

带速选择原则:(1)输送量大、输送带较宽时,应选择较高的带速。
(2)较长的水平输送机,应选择较高的带速;输送机倾角愈大,输送距离愈短,则带速应愈低。
(3)物料易滚动、粒度大、磨琢性强的,或容易扬尘的以及环境卫生条件要求较高的,宜选用较低带速。
(4)一般用于给了或输送粉尘量大时,带速可取0.8m/s~1m/s;或根据物料特性和工艺要求决定。
(5)人工配料称重时,带速不应大于1.25m/s。
(6)采用犁式卸料器时,带速不宜超过2.0m/s。
(7)采用卸料车时,带速一般不宜超过2.5m/s;当输送细碎物料或小块料时,允许带速为3.15m/s。
(8)有计量秤时,带速应按自动计量秤的要求决定。
(9)输送成品物件时,带速一般小于1.25m/s。
带速与带宽、输送能力、物料性质、块度和输送机的线路倾角有关.当输送机向上运输时,倾角大,带速应低;下运时,带速更应低;水平运输时,可选择高带速.带速的确定还应考虑输送机卸料装置类型,当采用犁式卸料车时,带速不宜超过3.15m/s.原煤的堆积密度为900kg/3 m;按给定的工作条件,取原煤的堆积角为20°.输送机的工作倾角β=0°;带式输送机的最大运输能力计算公式为3.6Q sυρ=(1)式中:Q——输送量()/ht;v——带速()/sm;ρ——物料堆积密度(3/kg m);s--在运行的输送带上物料的最大堆积面积, 2mK----输送机的倾斜系数考虑工作条件取带速为3.75m/s;带速与带宽、输送能力、物料性质、块度和输送机的线路倾角有关.当输送机向上运输时,倾角大,带速应低;下运时,带速更应低;水平运输时,可选择高带速.带速的确定还应考虑输送机卸料装置类型,当采用犁式卸料车时,带速不宜超过3.15m/s.表1倾斜系数k选用表倾角(°)2 4 6 8 10 12 14 16 18 20k 1.00 0.99 0.98 0.97 0.95 0.93 0.91 0.89 0.85 0.81 输送机的工作倾角=0°;查DTⅡ带式输送机选用手册(此后凡未注明均为该书)得k=1按给顶的工作条件,取原煤的堆积角为20°;原煤的堆积密度为900kg/3 m;考虑山上的工作条件取带速为3.73m/s;将个参数值代入上式, 可得到为保证给顶的运输能力,带上必须具有的的截面积S=0.108m²图3-2 槽形托辊的带上物料堆积截面查表, 输送机的承载托辊槽角35°,物料的堆积角为20°时,带宽为1600 mm的输送带上允许物料堆积的横断面积为0.1252m,此值大于计算所需要的堆积横断面积,据此选用宽度为1600mm的输送带能满足要求。
臂式斗轮堆取料机回转结构的设计
=
( 2 ̄ r / 3 6 0)= 0 . 0 1 1 4 9 0 4 4 。
所 以, x ∑= ( Z 1 + z 2 ) ( i n V ’ 一 i n Vd )
2 0 1 4 NO. 0 1( 下
工 业 技 术
臂式斗轮堆取料机 回转结构 的设计
刘洪博 ’孙 洋 刘英磊 ’尚 飞 ’
( 1 . 北方重工集 团有限公 司,辽 宁 沈阳 1 1 0 0 2 7 ;2 . 大连 重工 . 起 重有限公 司,辽 宁 大连 1 1 6 0 0 0 )
摘 要 :本 文介 绍 了臂 式斗 轮 堆取 料机 回转机 构 结 构 型式 ,讨 论 了臂 式 斗轮 堆 取料 机 回 转机 构 驱动 装 置计 算 ,详 述 了回 转机 构 回 转轴承 校核 。
关键 词 :臂 式 斗轮堆 取料 机 ;回转机 构 ;计算 ;选型 中图分 类号 :U 6 5 3 文 献标识 码 :A 臂式 斗 轮 堆取 料机 回转 机 构 主要 由 支 撑 部 分 与 回转 驱 动 装 置 组 成 。 回转 支
擦系数f = 0 . 0 1 2 ; 轴 承 公 称 滚 道 直 径 D轴 / 2 t a n a = O . 5 1 0 5 7 。故 x 1 = x 一 x 2 = O . 0 1 0 5 7 m m 3 5 5 0 ; 回转 部分 重量 G = 2 1 0 t )。M = M I  ̄ P d , 齿 轮 的变位 系数 x l = O . 0 1 0 5 7 m m这 是 风 = o . 7 M风 一。 3 . 回转轴承摩擦阻力矩 M摩 。 2 0 04 0 Nm+ 47 5 93 4Nm + 4 47 种 较 好 的 结果 ,即 保 证 了 中心距 的 整 4 . 回转平 面倾 角 造成 倾覆 力矩 M惯 。此力 +M 等效风 +M 摩 =1 矩小 忽略 。综 上所 述 回转 总 阻力 矩 M= M 3 0 N m = 6 4 0 7 1 MN m。 P 目 = M ' n / ( 9 9 5 5 0 * ) 数 ,又 使 得 小 齿 轮 只 增 大 了一 点 点 的 强 翻 +M 等效风 + M 摩。 度 ,也就是说大齿轮 的齿根强度大于小 8 . 4 7 k W。选 电机 功率 P 自 = 1 1 k w。
臂式斗轮堆取料机堆、取工艺实例解析
工程技术科技创新导报 Science and Technology Innovation Herald93臂式斗轮堆取料机(以下简称斗轮机)属于大型、连续、高效的散料装卸机械,广泛应用于大型散货码头、钢铁、水泥、火力发电和矿山等企业的散料输送系统中,是散料输送系统的核心。
以倡导节能环保,节约能源消耗量为目标,斗轮机选择作业工艺的原则是操作简单,作业效率高,能耗低。
1 斗轮机堆料工艺简介斗轮机堆料工艺主要采用定点为主的堆料方式:分为定点俯仰堆料方式和行走、回转组合定点堆料方式。
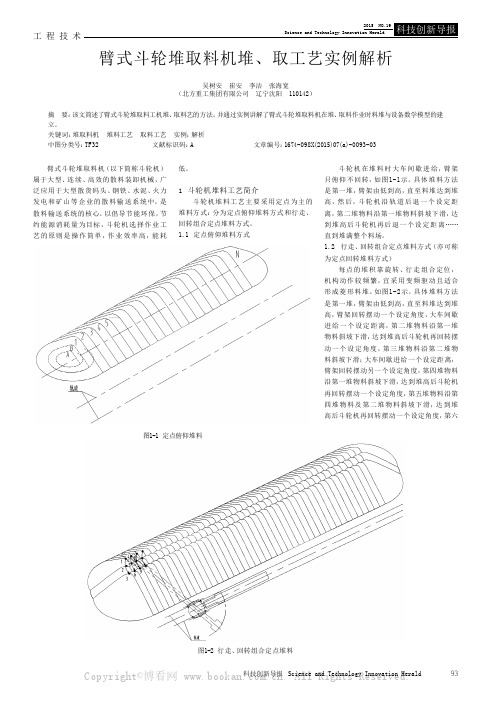
1.1 定点俯仰堆料方式斗轮机在堆料时大车间歇进给,臂架只俯仰不回转,如图1-1示。
具体堆料方法是第一堆,臂架由低到高,直至料堆达到堆高,然后,斗轮机沿轨道后退一个设定距离,第二堆物料沿第一堆物料斜坡下滑,达到堆高后斗轮机再后退一个设定距离……直到堆满整个料场。
1.2 行走、回转组合定点堆料方式(亦可称为定点回转堆料方式)每点的堆积靠旋转、行走组合定位,机构动作较频繁,宜采用变频驱动且适合形成菱形料堆。
如图1-2示。
具体堆料方法是第一堆,臂架由低到高,直至料堆达到堆高,臂架回转摆动一个设定角度,大车间歇进给一个设定距离,第二堆物料沿第一堆物料斜坡下滑,达到堆高后斗轮机再回转摆动一个设定角度,第三堆物料沿第二堆物料斜坡下滑;大车间歇进给一个设定距离,臂架回转摆动另一个设定角度,第四堆物料沿第一堆物料斜坡下滑,达到堆高后斗轮机再回转摆动一个设定角度,第五堆物料沿第四堆物料及第二堆物料斜坡下滑,达到堆高后斗轮机再回转摆动一个设定角度,第六臂式斗轮堆取料机堆、取工艺实例解析吴树安 崔安 李洁 张海宽(北方重工集团有限公司 辽宁沈阳 110142)摘 要:该文简述了臂式斗轮堆取料工机堆、取料艺的方法。
并通过实例讲解了臂式斗轮堆取料机在堆、取料作业时料堆与设备数学模型的建立。
关键词:堆取料机 堆料工艺 取料工艺 实例;解析中图分类号:TF32 文献标识码:A文章编号:1674-098X(2015)07(a)-0093-03图1-1 定点俯仰堆料图1-2 行走、回转组合定点堆料Copyright©博看网 . All Rights Reserved.工程技术科技创新导报 Science and Technology Innovation Herald94堆物料沿第五堆物料及第三堆物料斜坡下滑,达到堆高后斗轮机再回转摆动一个设定角度;大车间歇进给一个设定距离,臂架回转摆动另一个设定角度……直到堆满整个料场。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
张 亮 尚 飞 李 洁
北 方重 工集 团有 限公 司 沈 阳 1 1 0 1 4 2
摘 要 :介绍 了臂式 斗轮 堆取 料机回转机构驱 动装置 的结构 型式 ,讨论 了回转 速度 的确定 ,详述 了回转 机
构等效静阻力矩 的计算方法及 驱动装置中电动机的计算与选型 。
到 广泛 的应 用 。 比较 常见 的 回转 驱 动装 置 的 形 式 有 4种 :立 式 电机 +制 动 器 +立 式 圆 柱 齿 轮 减 速 器 +外 齿
目前 ,回转 大 轴 承 式 回转 机 构 有 两 种 布 置 方 案 ,主要 区别是 回转 大 轴 承 的选 型 为 有 齿 式 ( 内 齿 式和外 齿 式 ) 或无 齿 式 ( 需 单 独设 置 大 齿 轮 ) ,
t i o n;mo d eFra bibliotekl s e l e c t i o n
臂式 斗 轮 堆 取 料 机 属 于 大 型 、连 续 、高 效 的 散 料装 卸 机械 ,广 泛 应 用 于大 型散 货 码 头 、钢 铁 、 水 泥 、火 力发 电和 矿 山等企 业 的散 料输 送 系统 中 , 是 散料 输 送 系统 的 核 心 。臂 式 斗 轮 堆 取 料 机 主 要 由斗 轮机 构 、 回转 机 构 、带式 输 送 机 、俯 仰 机 构 、
wh e e l s t a c k e r a n d r e c l a i me r , d i s c u s s e s d e t e r mi n a t i o n o f t h e s wi n g i n g s p e e d, a n d d e s c i r b e s t h e c a l c u l a t i o n me t h o d s o f e q u i v —
见 图 1和 图 2 。
1 . 2 臂 式 斗轮堆 取料 机 的回转 速度 的确定
啮合 、 卧 式 电 机 +限 矩 联 轴 器 +制 动 器 +涡 轮 减 速 器 +外 齿 啮 合 、 立 式 或 卧 式 电 机 +限 矩 联
轴 器 +制 动 器 +立 式 行 星 减 速 器 +外 齿 啮 合 、
运行机构 、金属 结构、尾车、电气 设备及 辅助装 置 等组 成 。 回转 机 构 由 回转 支 承 装 置 和 回转 驱 动
装 置两 部分 组成 。
相对回转部件 固定 ,同时将整个 回转支 承上部 的 所 有载荷 ( 垂直 载荷 、水 平 载 荷 、弯矩 、扭矩 等 )
传 递到 下 部 的基 础 上 。 回转 支 承 内侧 或 外 侧 为 齿 圈结 构 。 回转 驱 动 固 定 在 回转 支 承 上 部 的 平 台 ( 金属钢 结 构 )上 ,通 过驱 动 小齿 轮 与齿 圈 啮合 达
到 回转 的 目的 。
1 回转驱动装置简介
臂 式 斗轮 堆 取 料 机 回转 机 构 的 回转 支 承 装 置 形 式有 回转 大 轴承 式 、圆锥 滚 轮 式 、台车 式 三 种 ,
其 中回转大轴承形式 与其他形式相 比,有 整机设
备 重心 低 、装 配 简 单 、抗 倾 翻 力 矩 大 等 优 点 ,得
a l e n t s t a t i c d r a g t o r q u e f o r s wi n g me c h a n i s m ,a n d c lc a u l a t i o n a n d mo d e l — s e l e c t i o n o f t h e mo t o r i n t h e d i r v i n g d e v i c e .
Ke y wo r d s :b u c k e t — wh e e l s t a c k e r a n d r e c l a i me r ;s w i n g me c h a n i s m ;e q u i v a l e n t s t a t i c d r a g t o r q u e ;mo t o r ;c a l c u l a —
关键词 :臂式斗轮堆取料 机 ;回转 机构 ;等效静阻力矩 ;电动机 ;计算 ;选型
中 图分 类 号 :U 6 5 3 . 9 2 8 . 5 文 献 标 识 码 :A 文 章 编 号 :1 0 0 1 —0 7 8 5( 2 0 1 4 )0 2— 0 0 2 5— 0 6
Ab s t r a c t :T h e p a p e r i n t r o d u c e s t h e s t r u c t u r a l t y p e o f t h e d r i v i n g d e v i c e f o r s w i n g me c h a n i s m o f a r m— t y p e b u c k e t -
臂 式斗 轮 堆 取 料 机 回转 机 构 的 最 大 回转 速 度 n I N m a x 的选 取 ,是 围绕 主机 设 备 生 产 率 的 ,它 与臂
式 斗轮 堆取 料机 斗轮 转速 / 1 , 有 如下 关系
算 方 法 ,其 他 类 型 的堆 取 料 机 可 参 考 此 方 法
进行 。
1 . 1 回转 大轴承 式 回转机 构布 置型 式 回转机 构 布 置 在 设 备 的有 相 对 回转 运 动 的 两 个 部件 间 ,一 般 以 回转 支 承 分 界 ,上 部 是 回转 部 件 ,下 部是 不 回转 的 基 础 部 件 。 回转 支 承 将 两 个