压电陶瓷微位移性能分析
压电陶瓷微位移器件性能分析
压电陶瓷微位移器件性能分析我国1426所在80年代研制出的WTDS-I型电致伸缩微位移器在国内许多研究部门得到应用,但生产单位没有及时对该器件的迟滞、蠕变、温度特性,尤其是动态特性进行必要的研究。
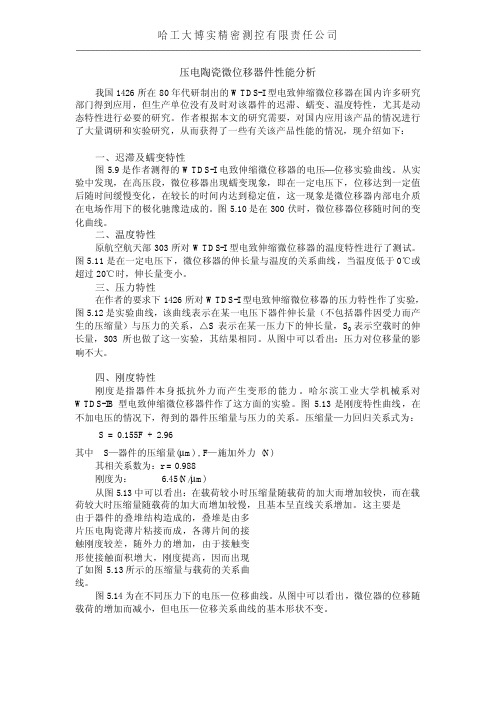
作者根据本文的研究需要,对国内应用该产品的情况进行了大量调研和实验研究,从而获得了一些有关该产品性能的情况,现介绍如下:一、迟滞及蠕变特性图5.9是作者测得的WTDS-I电致伸缩微位移器的电压 位移实验曲线。
从实验中发现,在高压段,微位移器出现蠕变现象,即在一定电压下,位移达到一定值后随时间缓慢变化,在较长的时间内达到稳定值,这一现象是微位移器内部电介质在电场作用下的极化驰豫造成的。
图5.10是在300伏时,微位移器位移随时间的变化曲线。
二、温度特性原航空航天部303所对WTDS-I型电致伸缩微位移器的温度特性进行了测试。
图5.11是在一定电压下,微位移器的伸长量与温度的关系曲线,当温度低于0℃或超过20℃时,伸长量变小。
三、压力特性在作者的要求下1426所对WTDS-I型电致伸缩微位移器的压力特性作了实验,图5.12是实验曲线,该曲线表示在某一电压下器件伸长量(不包括器件因受力而产生的压缩量)与压力的关系,△S表示在某一压力下的伸长量,S0表示空载时的伸长量,303所也做了这一实验,其结果相同。
从图中可以看出:压力对位移量的影响不大。
四、刚度特性刚度是指器件本身抵抗外力而产生变形的能力。
哈尔滨工业大学机械系对WTDS-IB型电致伸缩微位移器件作了这方面的实验。
图5.13是刚度特性曲线,在不加电压的情况下,得到的器件压缩量与压力的关系。
压缩量—力回归关系式为:S = 0.155F + 2.96其中S—器件的压缩量(µm) , F—施加外力 (N)其相关系数为:r = 0.988刚度为: 6.45(N/µm)从图5.13中可以看出:在载荷较小时压缩量随载荷的加大而增加较快,而在载荷较大时压缩量随载荷的加大而增加较慢,且基本呈直线关系增加。
压电陶瓷性能实验报告
一、实验目的1. 了解压电陶瓷的基本性能、结构、用途、制备方法。
2. 掌握压电陶瓷常见的表征方法及检测手段。
3. 通过实验,掌握压电陶瓷的性能测试方法,并对实验数据进行处理和分析。
二、实验原理压电陶瓷是一种具有压电效应的陶瓷材料,当受到外力作用时,会在其表面产生电荷;反之,当施加电场时,压电陶瓷会产生形变。
压电陶瓷的性能主要包括压电系数、介电常数、损耗角正切、机械品质因数等。
三、实验材料与仪器1. 实验材料:压电陶瓷样品2. 实验仪器:(1)电容测微仪(2)机械标定仪(3)直流电源(4)扫描隧道显微镜(5)谐振法测定仪(6)准静态法测定仪四、实验步骤1. 样品准备:将压电陶瓷样品清洗干净,并用无水乙醇进行脱脂处理。
2. 压电陶瓷性能测试:(1)电容测微仪测试:将压电陶瓷样品固定在电容测微仪上,通过改变直流电压,观察样品的轴向变形和弯曲变形。
(2)谐振法测定:将压电陶瓷样品固定在谐振法测定仪上,测量样品的频率响应曲线和压电耦合系数。
(3)准静态法测定:将压电陶瓷样品固定在准静态法测定仪上,测量样品的压电常数d33。
3. 数据处理与分析:将实验数据输入计算机,进行数据处理和分析,得出压电陶瓷的性能参数。
五、实验结果与分析1. 电容测微仪测试结果:通过电容测微仪测试,得出压电陶瓷样品的轴向变形和弯曲变形与电压的关系曲线。
根据曲线,计算出样品的压电系数。
2. 谐振法测定结果:通过谐振法测定,得出压电陶瓷样品的频率响应曲线和压电耦合系数。
根据曲线,计算出样品的介电常数和损耗角正切。
3. 准静态法测定结果:通过准静态法测定,得出压电陶瓷样品的压电常数d33。
根据测定结果,分析样品的压电性能。
六、实验结论1. 压电陶瓷样品具有良好的压电性能,满足实验要求。
2. 实验过程中,通过电容测微仪、谐振法测定和准静态法测定,分别获得了压电陶瓷样品的轴向变形、弯曲变形、频率响应曲线、压电耦合系数、介电常数、损耗角正切和压电常数等性能参数。
压电陶瓷(PDF)
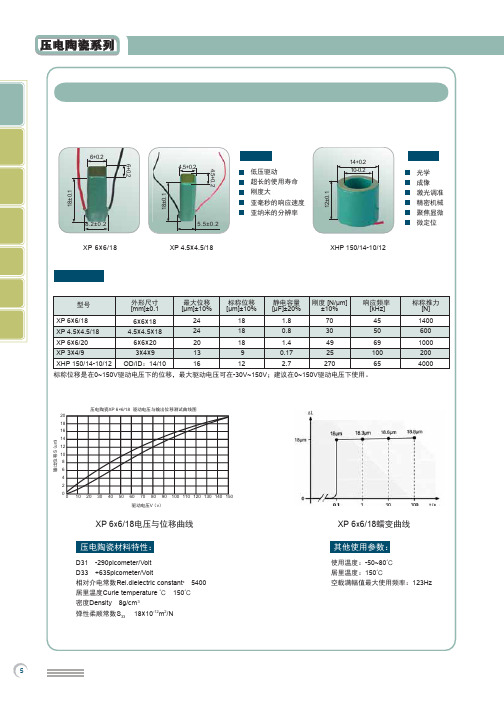
平移台系列纳米定位偏转台系列纳米定位动电源系列压电陶瓷驱微仪系列高精度测其他定制及 产品代理进口5低压驱动超长的使用寿命刚度大亚毫秒的响应速度亚纳米的分辨率光学成像激光调准精密机械聚焦显微微定位特点应用XP 6×6/18XP 4.5×4.5/18 XHP 150/14-10/12XP 6×6/18电压与位移曲线XP 6×6/18蠕变曲线D31:-290picometer/VoltD33:+635picometer/Volt相对介电常数Rel.dielectric constant ε:5400居里温度Curie temperature ℃:150℃密度Density :8g/cm 3弹性柔顺常数S 33 :18×10-12m 2/N 使用温度:-50~80℃居里温度:150℃空载满幅值最大使用频率:123HzXP 6×6/18XP 4.5×4.5/18XHP 150/14-10/12外形尺寸[mm]±0.16×6×184.5×4.5×18OD/ID :14/10 标称位移 [μm]±10%181812最大位移[μm]±10%242416静电容量[μF]±20%1.80.82.7刚度 [N/μm]±10%7030270响应频率 [kHz]455065标称推力[N]1400600 4000 型号其他使用参数:压电陶瓷材料特性:低压叠堆压电陶瓷-推荐型号术参数www.xm tkj.c o m *************X M T 芯明天科技024681012141618200102030405060708090100110120130140150S 输出位移(u m )驱动电压V (v )压电陶瓷XP 6×6/18驱动电压与输出位移测试曲线图6×6×203×4×9XP 6×6/20XP 3×4/92013 1.40.17492569100100020018 9标称位移是在0~150V 驱动电压下的位移,最大驱动电压可在-30V~150V ;建议在0~150V 驱动电压下使用。
压电陶瓷性能参数解析

压电陶瓷性能参数解析压电陶瓷是一种能够将电能转化为机械动能的材料。
它具有压电效应,即当施加电场时,会在陶瓷晶体中产生机械变形;反之,当施加机械应力时,会在陶瓷晶体中产生电荷积累。
这种特性使得压电陶瓷在传感器、声学器件、电子器件等领域得到广泛应用。
本文将介绍一些常见的压电陶瓷性能参数。
1.压电系数:压电系数是衡量压电材料性能的重要参数,用于描述材料在施加外部压力或电场时的响应情况。
它可分为压电应变系数d和压电电场系数g。
压电应变系数d用于描述压电陶瓷在施加电场时的形变情况,通常以毫米/伏作为单位。
压电电场系数g用于描述压电陶瓷在施加应力时产生的电荷量,通常以库伦/牛作为单位。
2.介电常数:介电常数是衡量材料在电场作用下电荷积累能力的参数。
压电陶瓷的介电常数通常以两个维度进行描述,分别为介电常数的相对静电介电常数(εr)和相对介电常数(εr)。
3.矫顽场和剩余极化:矫顽场是指施加电场或机械应力后,压电陶瓷尚未发生压电效应的最大电场或应力值。
剩余极化是指当外场消除时,材料中保留的极化强度。
这两个参数都能够反映压电陶瓷的稳定性和可逆性。
4.力常数和耦合系数:力常数是描述压电陶瓷的力-位移耦合效应的参数,标志着材料在施加电场时的机械响应程度。
耦合系数是力常数的相对值,是一种无量纲参数,常用于比较不同材料之间的压电性能。
5.介质损耗和压电品质因数:介质损耗是指压电陶瓷在工作频率下由于材料自身的损耗所导致的能量损失。
压电品质因数是衡量压电陶瓷在工作频率下损耗程度的参数,取决于介质损耗和介电常数等因素。
6.工作温度范围:工作温度范围是指压电陶瓷在正常工作条件下可以承受的温度范围。
这是一个重要的参数,因为一些压电材料在高温或低温环境中性能会发生变化。
以上是一些常见的压电陶瓷性能参数。
不同的应用场景对这些参数的需求也有所不同,因此在选用压电陶瓷材料时,需要根据具体的应用需求对这些性能参数进行综合考虑。
压电陶瓷的性能参数对材料的性能和应用特性有着重要的影响,因此对于压电材料的研究和理解是非常重要的。
压电陶瓷 最大输出位移

压电陶瓷最大输出位移1. 引言1.1 压电陶瓷概述压电陶瓷是一种具有压电效应的陶瓷材料,具有压电效应的陶瓷材料称为压电陶瓷。
压电效应是指某些晶体在受到机械应力或电场刺激时会发生形变或电极化现象。
压电陶瓷具有较高的机械强度、良好的化学稳定性和优良的压电性能,因此被广泛应用于传感器、马达、换能器等领域。
压电陶瓷具有多种规格和型号,可以根据具体的应用需求选择不同的压电陶瓷材料。
在工程领域中,压电陶瓷扮演着重要的角色,其在传感、控制、信号处理等方面都有广泛的应用。
随着科技的不断进步,压电陶瓷的性能和应用领域也在不断扩展和提升。
压电陶瓷是一种具有特殊性能和广泛应用前景的陶瓷材料,其在现代工程中具有重要地位,对于促进科技进步和社会发展具有重要意义。
1.2 压电效应简介压电效应是指在受到外力作用时,物质会产生电荷的分离或聚集,并在晶格结构内部产生电场的现象。
这种效应是由于压电材料的晶格结构具有非中心对称性,因此在受到应力变化时会产生极化现象。
压电效应是压电陶瓷的重要特性之一,也是其广泛应用的基础。
当外界施加压力或扭曲时,压电陶瓷会发生极化现象,即产生正负电荷的分离。
这种极化效应会导致压电陶瓷内部产生电场,从而使其表现出压电性质。
压电效应不仅可以实现电能到机械能的转换,还可以实现相反的机械到电的能量转换。
这种双向转换能力使得压电陶瓷在传感器、执行器等领域具有广泛的应用前景。
压电效应是压电陶瓷材料独特的物理现象之一,其在实际应用中能够为工程领域提供稳定可靠的解决方案,具有重要的意义和价值。
压电效应的简介将有助于深入了解压电陶瓷的特性和应用前景。
2. 正文2.1 压电陶瓷的结构和工作原理压电陶瓷是一种具有压电效应的材料,其结构和工作原理对于理解其性能和应用至关重要。
压电陶瓷通常由铅锆钛酸钠、铅镁铌酸、铅钛锆酸钡等材料构成,具有特殊的晶体结构。
在外加电场的作用下,压电陶瓷会发生形变,从而产生电荷,实现能量的转化与传递。
压电陶瓷2

压电陶瓷基本特性:1.位移特性KS EEQL r2 2εεε+=∆式中,Q r为极化后的剩余电荷,ε为压电介质的介电常数,E为压电陶瓷内部电场强度,S为压电陶瓷的横截面积,K为压电陶瓷碟片的弹性模量,ε0 为真空的介电常数式中的ε不是常量,而是和所加电压和加压史有关,因而压电陶瓷位移和电场强度(电压)的关系存在迟滞特性。
下图为这一陶瓷在正负电压下的位移-电压特性曲线:2.出力位移特性在空载的情况下压电陶瓷的输出位移为最大输出位移,在最大输出力的作用下,压电陶瓷的输出位移将为零,压电陶瓷的输出力和位移的关系曲线如下图:3.温度特性①压电陶瓷随着温度的变化而伸长。
②压电/电致伸缩陶瓷的输出位移随着温度的增加而减少,压电陶瓷的减少幅度较小,电致伸缩陶瓷减少幅度较大。
4.迟滞特性压电陶瓷的迟滞一般在14%左右,目前提出的减少迟滞的方法主要有:①采用电荷控制方法;②采用压电陶瓷两端串联小电容的方法;③运用模型;④采用电阻和电容组成桥路;⑤压电陶瓷元件位移闭环压电陶瓷作动器是高精度定位中的关键部件,它能满足纳米级定位精度,具有体积小、刚度高、响应快等优点。
然而它的相应位移和驱动电压之间存在着非对称迟滞特性,同时自身的蠕变和环境温度的变化也会造成其定位精度的漂移。
而且压电陶瓷作动器的非对称迟滞特性对控制精度的影响十分显著。
为减少和消除该不利影响,目前主要有两种解决途径:①电荷控制:它需要特别设计的电荷驱动放大器,但该放大器价格昂贵,且存在漂移和过饱和等问题,因而极大的限制了其应用;②电压控制:需要建立非线性迟滞的数学模型,并通过逆模型前馈补偿来控制精度。
电压控制逐渐成为压电陶瓷作动器精密控制的首选方案,其关键是非线性迟滞的精确建模。
对于迟滞特性建模存在两个困难:1)非局部存储现象.2)上升曲线和下降曲线是不对称曲线迟滞模型的研究主要分为两个方向:一种是基于机理的物理模型,从基本物理原理出发描述物理特性;如Maxwell模型,Jiles-Atherton模型,Duherm模型。
压电陶瓷实验报告
压电陶瓷实验报告压电陶瓷微位移性能测量实验报告一、实验目的:1、了解压电陶瓷的性能参数;2、了解电容测微仪的工作原理,掌握电容测微仪的标定方法;3、掌握压电陶瓷微位移测量方法;二、实验仪器:电容测微仪一台:型号JDC-2000测微台架一台:型号BCT-5C,斜度1:50直流调压器一台:电压量程(0~300V)标定平铁板一块压电陶瓷管一根三、实验原理:(一)利用测微台架标定电容测微仪在测微台架的台架上放置一金属平板,将电容测微仪探头用测微台架夹紧,使探头的端面与平板平行,见图1,移动测微台架的旋钮,分别读出测微仪移动示值和电容测微仪的示值。
这样得到一组数据即可对电容测微仪进行标定。
图1 电容侧微仪标定原理图(二)用标定后的电容测微仪测量压电陶瓷管的线性度在电容测微仪的线性区(对应机械标定仪的某个位置),通过可调直流电源按一定间隔改变直流电压(见图2),分别对压电陶瓷加压,使之分别产生轴向变形(见图3)和弯曲变形(见图4),从而得到压电陶瓷的伸长与偏转量与施加其上的电压的关系。
图2 可调高压电源图3 测压电陶瓷轴向伸缩图4测压电陶瓷侧向弯曲四、实验步骤(一)标定电容测微仪的线性度1、实验前,了解实验原理及其实验注意事项,并检查实验仪器是否齐全。
2、使用仪器前,将传感器端面与被测物(标定平铁板)表面用汽油认真清洗干净,以清洗掉杂质及灰尘微粒;而后将电源线和传感器与电缆分别连接好并拧紧。
3、将标定平铁板安放在测微台架的台架上,而后用夹具将电容传感器探头夹紧,接着上下调整探头使探头与标定平铁板距离接近测量区。
4、为便于进行数据分析,可将测微台架示值调至某一合适值,并将电容测微仪示值调零,而后进行实验;实验采用一人细调(等间距)测微台架,另一人记录的方式,为了标定线性区,测定线性误差,调值采用先等间距调至140μm,再等间距调回的方法。
(为了节约时间,调值范围为0~140μm,调值间距为5μm,共计读29个数。
压电陶瓷的性能参数解析_1
压电陶瓷的性能参数解析制造优良的压电陶瓷元器件,通常要对压电陶瓷性能提出明确的要求。
因为压电陶瓷性能对元器件的质量有决定性的影响。
因此,要讨论和认识压电陶瓷的元器件,就必须首先要了解压电陶瓷的性能参数与量度方法。
压电陶瓷除了具有一般介质材料所具有的介电性和弹性性能外,还具有压电性能。
压电陶瓷经过极化处理之后,就具有了各向异性,每项性能参数在不同方向上所表现的数值不同,这就使得压电陶瓷的性能参数比一般各向同性的介质陶瓷多得多。
压电陶瓷的众多的性能参数是它被广泛应用的重要基础。
(1)介电常数介电常数是反映材料的介电性质,或极化性质的,通常用ε来表示。
不同用途的压电陶瓷元器件对压电陶瓷的介电常数要求不同。
例如,压电陶瓷扬声器等音频元件要求陶瓷的介电常数要大,而高频压电陶瓷元器件则要求材料的介电常数要小。
介电常数ε与元件的电容C,电极面积A和电极间距离t之间的关系为ε=C·t/A(1-1)式中,各参数的单位为:电容量C为F,电极面积A为m2,电极间距t为m,介电常数ε为F/m。
有时使用相对介电常数εr(或κ),它与绝对介电常数ε之间的关系为εr=ε/εo(1-2)式中,εo为真空(或自由空间)的介电常数,εo=8.85×10- 1 2(F/m),而εr则无单位,是一个数值。
压电陶瓷极化处理之前是各向同性的多晶体,这是沿1(x)、2(y)、3(z)方向的介电常数是相同的,即只有一个介电常数。
经过极化处理以后,由于沿极化方向产生了剩余极化而成为各向异性的多晶体。
此时,沿极化方向的介电性质就与其他两个方向的介电性质不同。
设陶瓷的极化方向沿3方向,则有关系即经过极化后的压电陶瓷具有两个介电常数ε11和ε33。
由于压电陶瓷存在压电效应,因此样品处于不同的机械条件下,其所测得的介电常数也不相同。
在机械自由条件下,测得的介电常数称为自由介电常数,在εT 表示,上角标T表示机械自由条件。
在机械夹持条件下,测得的介电常数称为夹持介电常数,以εS表示,上角标S表示机械夹持条件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
压电陶瓷微位移器件性能分析
我国1426所在80年代研制出的WTDS-I型电致伸缩微位移器在国内许多研究部门得到应用,但生产单位没有及时对该器件的迟滞、蠕变、温度特性,尤其是动态特性进行必要的研究。
作者根据本文的研究需要,对国内应用该产品的情况进行了大量调研和实验研究,从而获得了一些有关该产品性能的情况,现介绍如下:
一、迟滞及蠕变特性
图5.9是作者测得的WTDS-I电致伸缩微位移器的电压 位移实验曲线。
从实验中发现,在高压段,微位移器出现蠕变现象,即在一定电压下,位移达到一定值后随时间缓慢变化,在较长的时间内达到稳定值,这一现象是微位移器内部电介质在电场作用下的极化驰豫造成的。
图5.10是在300伏时,微位移器位移随时间的变化曲线。
二、温度特性
原航空航天部303所对WTDS-I型电致伸缩微位移器的温度特性进行了测试。
图5.11是在一定电压下,微位移器的伸长量与温度的关系曲线,当温度低于0℃或超过20℃时,伸长量变小。
三、压力特性
在作者的要求下1426所对WTDS-I型电致伸缩微位移器的压力特性作了实验,图5.12是实验曲线,该曲线表示在某一电压下器件伸长量(不包括器件因受力而产生的压缩量)与压力的关系,△S表示在某一压力下的伸长量,S0表示空载时的伸长量,303所也做了这一实验,其结果相同。
从图中可以看出:压力对位移量的影响不大。
四、刚度特性
刚度是指器件本身抵抗外力而产生变形的能力。
哈尔滨工业大学机械系对WTDS-IB型电致伸缩微位移器件作了这方面的实验。
图5.13是刚度特性曲线,在不加电压的情况下,得到的器件压缩量与压力的关系。
压缩量—力回归关系式为:
S = 0.155F + 2.96
其中S—器件的压缩量(µm) , F—施加外力 (N)
其相关系数为:r = 0.988
刚度为: 6.45(N/µm)
从图5.13中可以看出:在载荷较小时压缩量随载荷的加大而增加较快,而在载荷较大时压缩量随载荷的加大而增加较慢,且基本呈直线关系增加。
这主要是
由于器件的叠堆结构造成的,叠堆是由多
片压电陶瓷薄片粘接而成,各薄片间的接
触刚度较差,随外力的增加,由于接触变
形使接触面积增大,刚度提高,因而出现
了如图5.13所示的压缩量与载荷的关系曲
线。
图5.14为在不同压力下的电压—位移曲线。
从图中可以看出,微位器的位移随载荷的增加而减小,但电压—位移关系曲线的基本形状不变。
五、动态特性
压电陶瓷器件是在电场作用下产生位移输出,具有较高的响应速度,但在电学上压电陶瓷器件等效为一个电容,因此,器件响应速度不仅取决于其自身等效电容值的大小,而且还与所采用驱动电源的品质有密切的关系,电源的驱动能力 和响应特性直接影响到器件的动态特性,
由于应用WTDS-I 型的研究部门,根据各
自的不同需要,所采用的驱动电源的原理
及性能有所不同,因此得到的WTDS-I 型
电致伸缩器件的动态特性也不尽相同,所
以作者根据本文的研究需
要研制出精度高、动态性能好、驱动能 图5.15 电致伸缩微位移器简化模型 力强的驱动电源,对WTDS-I 型电致伸缩位移器的动态特性作了进一步研究。
图5.15是微位移器的简化模型,C 为微位移器的等效电容,R C 为电压放大电路的等效充放电电阻,Km 是微位移器的电压位移转换系数,根据微位移与电压的关系式
X K U m =0
2 可推导出在单位阶跃电压输入作用下,微位移器的位移输出响应简化模型为: X t K e e m t Tm t Tm ()()//=−+−−122 (5.16) 式中: T m = R c C
从图5.9中可以看出,在电压大于120伏时,微位移器的输出位移有较好的线性度,电压变化范围较小时,迟滞也较小,至于蠕变,它是一个缓慢量,在较长的时间范围内才有所体现,因此,在局部范围内可以认为位移是线性的,从而得到如下关系式:
∆X = K e ∆U c
式中:∆X —位移变化量(µm);∆U —电压变化量(v);
K c —可变电压位移转换系数(µm/v);
从而得到微位移器的传递函数为: G s X s U s K T S
c i c m ()()()==+∆∆1 (5.17) 通过在不同电压段下,对微位移器施加阶跃电压信号,得到微位移器的位移阶跃响应特性。
图5.16 (a)为施加在WTDS-I 型电致伸缩陶瓷微位移器上的0-160v 方波电压,图5.16 (b)、图5.16 (c)是图5.16(a)上升和下降部分的放大图。
图5.17为电致伸缩陶瓷微位移器位移阶跃响应的上升和下降部分的放大图,其纵坐标为与所测位移相对应的模拟电压信号。
从对压电陶瓷器件性能的分析与实验研究中可以看出,压电陶瓷微位移器具有体积小,结构紧凑,分辨率高、能实现亚微米的微位移,是理想的微位移器件,但也存在迟滞和蠕变等缺点。
针对这一问题,一方面会随着压电陶瓷材料的不断完善而得到解决,另一方面也可以通过在应用中采用适当的控制方式,来满足不同的使用要求,目前主要有如下三种方法:
(1) 基于上述对压电陶瓷的机理分析,采用直接控制电极化强度的方法,在开环状态下,改善压电陶瓷的迟滞、蠕变和位移非线性的不足。
(2) 采用精密小型位移传感器,实现压电陶瓷微位移器的位置闭环,研制机构、驱动、检测一体化的微动机器人是微位移技术领域中的前沿课题,本文的微动机器人PPMR就是采用这种方法实现了纳米级的超精密定位。
(3) 采用工作质量闭环,充分利用压电陶瓷微位移器高频响、高分辨率的优点,以压电陶瓷微位移机构应用背景的工作质量实现闭环,如光纤对接时以光纤对接信号最强、光学调焦系统以成像的清晰度、用电化学方法复制加工三维超微图形时以隧道电流保持恒值实现闭环等等。