第一章-目标跟踪基本原理与机动目标模型1
2014研究生数学建模B题优秀论文
三 符号说明
r
r
k
目标径向距离 目标方位角 目标俯仰角 雷达极坐标下测距误 差 雷达极坐标下方位角 误差 雷达极坐标下俯仰角 误差 雷达在地球直角坐标 下 x 轴上的标准差 雷达在地球直角坐标 下 y 轴上的标准差 雷达在地球直角坐标 下 z 轴上的标准差 目标的运动状态
-3-
一 问题重述
目标跟踪是指根据雷达等传感器所获得的对目标的测量信息, 连续地对目标 的运动状态进行估计,进而获取目标的运动态势及意图。目标机动则是指目标的 速度大小和方向在短时间内发生变化,通常采用加速度作为衡量指标。目标跟踪 与目标机动是“矛”与“盾”的关系。因此,引入了目标机动时雷达如何准确跟踪的 问题。 机动目标跟踪的难点在于以下几个方面:(1) 描述目标运动的模型,即目标 的状态方程难于准确建立。通常情况下跟踪的目标都是非合作目标,目标的速度 大小和方向如何变化难于准确描述; (2) 传感器自身测量精度有限加之外界干 扰,传感器获得的测量信息,如距离、角度等包含一定的随机误差,用于描述传 感器获得测量信息能力的测量方程难于完全准确反映真实目标的运动特征; (3) 当存在多个机动目标时,除了要解决(1)、(2)两个问题外,还需要解决测量信息 属于哪个目标的问题,即数据关联。由于以上多个挑战因素以及目标机动在战术 上主动的优势,机动目标跟踪已成为近年来跟踪理论研究的热点和难点[1]。 目标跟踪处理流程通常可分为航迹起始、点迹航迹关联(数据关联)、航迹 滤波等步骤。 另外, 不同类型目标的机动能力不同。 因此, 在对机动目标跟踪时, [2] 必须根据不同的目标类型选择相应的跟踪模型 。 根据题目提供的 3 组机动目标测量数据,本文拟解决以下问题: 问题一 根据附件中的 Data1.txt 数据,分析目标机动发生的时间范围,并 统计目标加速度的大小和方向。建立对该目标的跟踪模型,并利用多个雷达的 测量数据估计出目标的航迹。鼓励在线跟踪。 问题二 附件中的 Data2.txt 数据对应两个目标的实际检飞考核的飞行包线 (检飞:军队根据国家军标规则设定特定的飞行路线用于考核雷达的各项性能 指标,因此包线是有实战意义的)。请完成各目标的数据关联,形成相应的航 迹,并阐明你们所采用或制定的准则(鼓励创新)。如果用序贯实时的方法实 现更具有意义。若出现雷达一段时间只有一个回波点迹的状况,怎样使得航迹 不丢失?请给出处理结果。 问题三 根据附件中 Data3.txt 的数据,分析空间目标的机动变化规律(目标 加速度随时间变化)。若采用第 1 问的跟踪模型进行处理,结果会有哪些变化? 问题四 请对第 3 问的目标轨迹进行实时预测,估计该目标的着落点的坐 标,给出详细结果,并分析算法复杂度。 问题五 Data2.txt 数据中的两个目标已被雷达锁定跟踪。 在目标能够及时了 解是否被跟踪,并已知雷达的测量精度为雷达波束宽度为 3° ,即在以雷达为锥 顶,雷达与目标连线为轴,半顶角为 1.5° 的圆锥内的目标均能被探测到;雷达 前后两次扫描时间间隔最小为 0.5s。为应对你们的跟踪模型,目标应该采用怎 样的有利于逃逸的策略与方案?反之为了保持对目标的跟踪,跟踪策略又应该 如何相应地变换?
一种实时的机动目标多模型跟踪算法
火 炮 发 射 与控 制 学 报 J OUR NALOFGU AUN H & C NT OL NL C O R
20 0 8年 1 月 2
一
种 实 时 的机 动 目标 多模 型 跟踪 算 法
杨 维 ,丁天 宝 ,赵 凯 ,石德 乾
( 北 机 电 工 程 研 究 所 , 陕 西 成 阳 7 2 9 ) 西 1 0 9
量 小 ,因此 适 合 在 自行 高炮 的 目标 跟 踪 中使 用 。
关 键 词 : 息 处 理 技 术 ;机 动 目标 跟 踪 ;转 换 测 量 ;K l n滤 波 ;滤波 模 型 偏 离 度 信 ama
中图 分 类 号 : P 0 . ;T 3 1 9 T 3 1 6 P 9 . 文献 标 志码 :A 文 章 编 号 :1 7 — 5 4 ( 0 8 40 0 — 4 6 36 2 2 0 )0 — 1 0 0
mo e s n h n l ea t ma i wi h o h wo c l t r l l n fle swa mp e e t d,S h o d l ,a d t e o —i u o t s t f et o l e a n c c t a Ka ma i r si lm n e t O t et —
摘
要 :提 出 了 一种 实 时 的机 动 目标 多 模 型 跟 踪 算 法 。该 算 法 包 含 两个 并 行 的 K l n滤 波 器 ,分 别 为 匀 ama
速 Ka n滤 波 器 和 匀 加 速 K l n滤 波 器 。定 义 了 “ 波 运 动 模 型 偏 离 度 ”作 为 模 型 切 换 的 判 据 ,在 线 实 现 l ma ama 滤 了两 个 Kam n 波器 的 自动切 换 ,使 总 输 出 结果 最 大程 度 的符 合 实 际 运 动 模 型 。通 过 可 调 过 程 噪声 的 自适 应 la 滤 方 法 ,抑 制 了 滤 波 发 散 ,避 免 了在 模 型 切 换 时 误 差 跳 变 过 大 。 仿 真 测 试 结 果 表 明 ,该 算 法 跟 踪 精 度 高 ,计 算
基于强跟踪滤波器的Jerk模型目标跟踪算法

0 引言
在机动目 标跟踪中, 建立符合实际的目 标运动
模型 直 人 关 的 点 K 一 是 们 注 重 。 ishore M ehrotra 于
19 7 年提出了 种高 9 一 度机动目 标模型Je k模型!’ r !,
该模型算法通过在加速度模型的基础上增加了一 维,即实时地对加速度的导数— 加加速度进行估 计,以此得到对目 标状态更加精确的估计,从而达 到对机动目 标的自 适应跟踪。然而,当所跟踪目 标 的加速度发生阶跃时, 其瞬时加速度变化率是一冲 激函数, 其对应的 将是极大的J r 机动, ek 此时Je k r 模型的滤波精度和稳定性则必将明显下降。这是由 该模型算法中所采用的 Ka ma 滤波器 ( KF ) 或扩 l n 展的 Kalma 滤波器 ( EKF ) 白身鲁棒性较差等原 n 因所引起的。因此, 如何更好地用 Je k 模型跟踪突 r 发机动目 标则成为一个值得研究的问题。 在非线性滤波器设计方面,周东华等人提出了 一种强跟踪滤波器算法 ( str ng Tracking FIlte , o r sT ) 2 , F l . ) 5 其在正交性原理的基础上, 通过引人时 变的渐消因子,在线调整状态预测误差协方差阵和
式 : x伏 *(走城), ), )]‘ 中 )=1 ),走父 芡 ; 仕 以
基金项目: 国家自 然科学基金资助项月( 印17 0 引 2 3 作者简介: 宋 强 〔 3 一 198 )。男,硕士牛; 何 友 ( 19 6 ). 男,教授。 5 博导,博士。
海 军很 空工粗 学 陇 学报
第 22 卷
基于强跟踪滤波器的 J e k 模型 目标跟踪算法 r
宋 强’何 友’ 杨 俭2 , ,
l ( 海军航空上 程学院 信息融合技术研究所,山东 烟台, 叨。 2石 卜
南京航空航天大学硕士学位论文17...

南京航空航天大学硕士学位论文I摘 要多传感器信息融合多目标跟踪是当前目标跟踪领域的研究前沿它将多个传感器信息进行有机的合成用以提高目标运动状态估计的精度其性能比单一传感器优越很多由于在军事和民用领域具有广阔的应用前景多传感器融合多目标跟踪问题的研究已经受到人们的广泛关注杂波强干扰和目标高度机动情况下的数据关联是多目标跟踪领域的一个难点问题,也是多目标跟踪的关键问题本文针对多传感器信息融合多目标跟踪中存在的问题主要做了以下几个方面的工作:1提出了一种基于目标多特征信息的支持向量机数据关联算法即把量测新息作为支持向量机的输入通过支持向量机对各个传感器的测量数据进行关联处理实现对多目标的精确跟踪2针对多传感器信息融合多目标跟踪提出了基于支持向量机的航迹关联算法把各个传感器目标航迹状态估计偏差作为支持向量机输入对各个传感器的目标的状态估计信息进行分类识别从而实现多传感器信息融合多目标跟踪中的航迹关联3将支持向量机与扩展Kalman 滤波算法结合起来先从传感器的量测输出和跟踪滤波器的状态输出中提取和目标机动有关的特征而后送入支持向量机估计目标的机动输入实现对机动目标的精确跟踪关键词信息融合目标跟踪卡尔曼滤波数据关联支持向量机支持向量机在多目标跟踪中的应用研究IIABSTRACTMulti-target tracking based on multi-sensor information fusion is the leadingtechnology in target tracking research now, which can combine multi-sensor information to increase the precision of target state estimation, and has more advantages than the case using single sensor.Due to its broad perspective of applications in military and civil industries, study on multi-target tracking based on multi-sensor information fusion has been paid more attention by researchers in the world. One of the key problems in the study is data association under the environment with dense clutter and high-level maneuvering targets. In this paper, the following facets will be studied:1. A new data association algorithm based on multiple features and support vector machines for multi-target tracking is presented. In the new algorithm, the filtering measurement innovation is considered to be the input of the support vector machines for judging the association between each target measurement and track. According to the radar tracking system, the accurate tracking for multi-targets in heavily cluttered environment is implemented.2. For multi-target tracking system based on multi-sensor information fusion, a track-track data association algorithm based on support vector machines is proposed. In this algorithm, the difference between each tracking of different sensor are calculated, and as inputs are sent into the support vector machines to for judging the association between track and track.3. For the radar/infrared image fused tracking system, a extend Kalman filter combines with support vector machines to form a closed loop. The features related to the target maneuver are extracted from radar and infrared sensor. and as inputs are sent into the Support Vector Machines firstly, and then, the target’s maneuver inputs are estimated secondly, so that, the accurate tracking is achieved finally.Key Words: information fusion, target tracking , Kalman filtering , data association, support vector machines承诺书本人郑重声明所呈交的学位论文是本人在导师指导下独立进行研究工作所取得的成果尽我所知除文中已经注明引用的内容外本学位论文的研究成果不包含任何他人享有著作权的内容对本论文所涉及的研究工作做出贡献的其他个人和集体均已在文中以明确方式标明本人授权南京航空航天大学可以有权保留送交论文的复印件允许论文被查阅和借阅,可以将学位论文的全部或部分内容编入有关数据库进行检索可以采用影印缩印或其他复制手段保存论文作者签名 日期2006.2.15南京航空航天大学硕士学位论文注释表MTT 多目标跟踪SVM 支持向量机SMO 支持向量机序列最小优化算法JPDA 联合概率数据关联算法NJPDA 基于神经网络的联合概率数据关联算法KTT Karush-Kuhn-Tucher约束条件RCS 雷达目标散射截面积VII南京航空航天大学硕士学位论文1第一章 绪论1.1引言多目标跟踪(MTT-Multiple Target Tracking)是将传感器所接收到的量测信息分解对应于各种不确定信息源所产生的不同观测集合或轨迹它综合运用了随机统计决策自适应滤波知识工程神经网络模糊推理等现代信息处理技术多目标跟踪输出的结果包括被跟踪的目标数目以及相应于每一条轨迹的目标运动参数如位置速度加速度及目标分类特征等同时为战场态势评估和威胁估计提供决策支持随着多目标跟踪理论研究的日益成熟与深入多目标跟踪技术在军事和许多民用领域都有着广泛的应用可以列举的主要领域包括:弹道导弹防御空防海洋监视战场监视精确制导高空突防以及空中交通管制汽车防碰撞导航机器人视觉等多目标跟踪理论研究涉及诸多方面包括有:量测数据形成与处理机动目标模型机动检测与机动辨识自适应滤波与预测跟踪坐标系与滤波状态变量的选取跟踪门的形成数据关联跟踪起始与终止等1.2多目标跟踪与支持向量机的研究与发展现状1.2.1多目标跟踪的研究与发展现状对多目标跟踪技术的研究可以追溯到20世纪50年代首先由Wax 在1955年给出了多目标跟踪的基本概念1964年Sitler 在包括数据关联等内容的多目标跟踪理论方面取得了开创性的突破之后Bar-Shalom 和Singer 将数据关联技术与滤波理论的有机结合有力地推动了现代多目标跟踪技术的快速发展20世纪70年代逐步发展起来的信息融合技术以及其他智能信息处理技术为多目标跟踪理论的发展提供了更为广阔的空间多目标跟踪的关键就是对多源信息进行关联然后再采用相应的方法对各个聚类中的数据进行无缝集成国内外提出的关联方法主要有最近邻法极支持向量机在多目标跟踪中的应用研究2大似然法最优差别法统计关联法D-S 证据推理模糊推理法聚类分析法遗传算法和神经网络方法等[1-13]在军事应用领域中数据关联的研究经历了从单目标跟踪的最近邻法概率数据关联法等到多目标跟踪的联合概率数据关联和多假设理论等由于收集的信息中存在的不确定性因素及各信息源存在不同的可信度因而引进模糊逻辑证据理论和神经网络等智能化方法来进行信息融合的数据关联的研究这些方法都是采用一种非直接的关联总的来讲,现有的数据关联算法按数学方法大体上分为四类概率论证据理论模糊逻辑和神经网络其中的概率论在关联应用中的研究趋于完善模糊逻辑和神经网络在该应用中的研究起步不久滤波与预测是目标跟踪系统的最基本要素状态估计就是对目标过去的运动状态进行平滑对目标当前的运动状态进行滤波和对目标未来的运动状态进行预测当目标作非机动运动时采用基本的滤波算法就可以很好地跟踪目标这些滤波算法主要有线性自回归滤波αβ−或αβγ−−滤波以及卡尔曼滤波等在实际跟踪过程中目标往往发生机动因此上述这些基本滤波算法都很难在目标各种滤波状态下使滤波器具有良好的跟踪性能为此许多学者致力于对各种自适应滤波算法的研究并取得很多重要成果这些算法概括起来有三类:检测自适应滤波实时辨识自适应滤波和全面自适应滤波1检测自适应滤波检测自适应滤波的基本思想是:机动的发生使原来的模型变差从而造成目标状态估计偏离真实状态滤波残差(新息)特性发生变化根据残差过程的变化可设计出机动检测准则一旦检测到机动发生或消除立即进行模型转换或噪声方差调整此类算法的关键在于设计出合理的检测方式包括监测门限的选择以及恰当的模型转换与调整等不足之处在于机动发生和检测之间存在不可避免的时间延迟典型方法包括:决策自适应跟踪器Thorp 检测器输入(加速度)估计器变维滤波(VDF)等2实时辨识自适应滤波实时辨识自适应滤波指在线辨识出机动加速度或其统计特性(表现为均值和方差等)典型方法有:协方差匹配法自适应状态估计器二级卡尔曼滤波算法以及机动目标当前统计模型的均值与方差自适应跟踪算法3全面自适应滤波南京航空航天大学硕士学位论文3实时辨识自适应滤波能够较好地反映目标机动范围和强度的变化机动时跟踪效果很好但非机动时性能有所下降而检测自适应滤波在非机动时跟踪精度较高机动时性能较差自然就产生了两类方法综合发展的趋势全面适应滤波1.2.2支持向量机的研究与发展现状从20世纪60年代开始V.N.Vapnik 等人在有限样本的机器学习问题上取得一系列进展,在这一研究领域建立了一套较完整的理论体系支持向量机Support Vector Machine 简称SVM近年来支持向量机由于其出色的学习性能已成为机器学习领域的一个研究热点[14-18]与传统基于经验风险最小化学习方法不同SVM 基于结构风险最小化,在保持较小训练误差的同时使学习机器的容量较小从而避免了过学习问题SVM 的训练最终转化成为一个二次型寻优问题从理论上说得到的将是全局最优点SVM 从理论上解决了神经网络等学习机器的过学习训练过程中的局部极小点问题1.2.2.1支持向量机训练算法的研究标准支持向量机可以归结为求解一个受约束的二次型规划问题对于这个优化问题可以用传统的二次型优化技术来解决当训练样本数较大时利用这些算法来训练支持向量机的计算复杂性太大为了降低计算资源提高算法效率研究者们利用支持向量机优化问题本身所具有的特性近年来已经提出了几种改进的支持向量机训练算法1分块算法分块算法由Vapnik [16]首先提出它是基于这样一个事实即去掉Lagrange乘子等于零的训练样本不会影响原问题的解对于给定的训练样本集如果其中的支持向量是已知的寻优算法就可以排除非支持向量只需对支持向量计算权值即Lagrange 乘子即可该方法通过将数据集分块每次从分块数据中提取支持向量加以保留并补充进新的样本经过反复训练直至所有的样本都满足KKT 收敛条件为止分块算法大大减少了矩阵的大小当支持向量的数目远远小于训练样本数目时分块算法显然能够大大提高运算速度然而如果支持向量的数目本身就比较多随着算法迭代次数的增多工作样本集也会越来越大算法依旧会变得十分复杂支持向量机在多目标跟踪中的应用研究42工作集选择算法针对分块算法的缺点Osula 提出工作集选择算法[19](subset selectionalgorithm)也叫分解算法来加快支持向量机的训练速度工作样本集的大小固定在算法速度可以容忍的限度内迭代过程中只是将剩余样本中部分违反KKT条件的样本与工作样本集中的样本进行等量交换即使支持向量的个数超过工作样本集的大小也不改变工作样本集的规模而只对支持向量中的一部分进行优化这种算法的关键是在于选择一种合适的工作集换入换出策略即工作集的确定方法 3序列最小优化算法序列最小优化算法[16]sequential minimal optimization,简称SMO可以说是分解算法的一个极端特例,其优点是针对2个样本所形成的二次规划问题可以有解析解的形式因为只有两个变量应用等式约束可以将其中一个用另一个表示出来所以迭代过程中每一步的子问题的最优解可以直接用解析的方法求出来算法避开了复杂的数值求解优化问题的过程SMO 算法可以分为两个组成部分内环和外环外环根据KKT 优化条件采用启发式方法从数据集中挑选出每次要优化的数据内环则对Lagrange 乘子进行分析求解同时在SMO 算法中内存的需求与训练数据的大小呈线性关系不需要额外矩阵存储这样它可对非常大的数据进行训练4几何算法支持向量机方法具有清晰的几何含义[20]几何方法就是利用这种几何解释,将支持向量机的训练问题转化为经典的几何问题比如Keerthi [21]将两个传统的NPA 算法Nearest Point Algorithm 加以组合改进,设计出一个快速迭代算法来求解分类支持向量机张铃[22]把分类支持向量机求解转化为一个凸包到原点的最小距离并利用迭代单纯形算法Iterative Simplex Algorithm 来求解Ming_HsuanYang [23]利用训练集中的几何信息提出了卫向量(Guard vector)的概念所有的支持向量都是卫向量但反之不成立当训练集较大时,可以先找出卫向量再以卫向量构成传统的QP 问题求出支持向量卫向量的求解是通过判断其对偶空间中的线性规划问题的可行性而不是求其解从而使问题大大简化张学工[15]提出了中心支持向量机算法他将每类训练样本集进行聚类分成若干子集用子集中心组成新的训练样本集训练支持向量机(5)变异算法南京航空航天大学硕士学位论文5一般来说对于标准支持向量机所带来的二次型规划问题尽管提出了很多种方法来减少计算优化问题的计算复杂性但效果仍旧不是太理想于是一些学者提出改变标准支持向量机问题提法以简化所需的优化问题潘菁[24]将支持向量机的核方法与小波变换理论相结合利用小波基函数构造SVM 的核函数从而得到一种新的SVM 模型赵恒平[25]提出了模糊支持向量机模型周伟达提出了用线性规划来求解支持向量机[26]张浩然[27]对最小二乘支持向量机作了详细介绍它把支持向量机的求解问题转化为一个线性方程组问题来求解并给出了其快速学习算法本文就是基于最小二乘支持向量机模型展开研究的1.2.2.2支持向量机的应用研究支持向量机在理论上具有很突出的优势但应用研究尚相对比较滞后随着理论的不断完善支持向量机的应用逐渐成为各国研究者的研究热点目前支持向量机算法在模式识别回归估计等方面已都有应用在模式识别方面支持向量机主要应用于手写体相似字的识别[28]文本分类[29]人脸识别与检测[30]空中目标识别[31]机械故障的诊断[32]疾病诊断[33]等方面在数据回归方面朱国强把支持向量机应用于软测量中[34] 王定成Drezet 将支持向量机应用于系统建模与辨识中Bas J. de Kruif 将支持向量机作为通用函数逼近器[35-37]并把它用于前馈学习控制中以克服传统函数逼近器的维数灾难问题支持向量机在混沌时间序列的预测中显示出了强大的优势[3839]在经济社会学方面支持向量机还被用于股票指数的预测和交易市上的汇率预测[4041]由于支持向量机具有出色的性能近几年被应用于信息处理的各个分支中1.3研究问题的提出所谓多目标跟踪就是为了维持对多个目标当前状态的估计而对所接收到的量测信息进行处理的过程多目标跟踪技术就是把传感器检测到的信息进行分类和集成提取对象的有效信息以形成某一被测对象信息的全面和完整的描述因此多目标跟踪可以视为在一定条件下信息空间的一种非线性推理过程即把传感器检测到的信息作为一个空间M最后要得到的目标状态信息作为另一空间N 多目标跟踪技术就是实现M 到N 映射过程即fM N 由于这个过程是一个不确定的推理过程依据推理方法不同数据关联算法也就各不相支持向量机在多目标跟踪中的应用研究6同主要有概率论证据理论模糊逻辑和神经网络上述方法因为先验概率专家经验等获取困难数据多推理链较长使得在实际应用中常常出现瓶颈与其他的学习机相比SVM 具有较好的泛化能力非线性处理能力和高维处理能力具体地说支持向量机主要具有以下几个特点和优点1其目标是得到现有信息下的最优解而不仅仅是样本数趋于无穷大时的最优值它实现的是结构风险最小化而不是经验风险最小化2算法最终将转化成为一个二次型规划或线性规划问题从而得到的将是全局最优点解决了一些学习方法中无法避免的局部极值问题3算法将实际问题通过非线性变换转换到高维的特征空间(Feature Space )在高维空间中构造线性函数来实现原空间中的非线性函数特殊性质能保证机器有较好的泛化能力同时它巧妙地解决了维数问题其算法复杂度与样本维数无关4支持向量机具有十分清晰的几何意义可以根据其几何性质来选择其模型结构和构造学习方法它的学习结果是训练样本集中的支持向量正是由于支持向量机理论在解决模式识别中小样本非线性及高维识别问题中表现出独特的优势和良好的应用前景因而被广泛的应用到模式识别和非线性回归等问题中本文将支持向量机引入到多目标跟踪领域试图解决多目标跟踪中的几个具体问题1.4论文结构及所做工作当前在多传感器信息融合多目标跟踪研究中目标跟踪算法和数据关联算法已经成为一个非常重要且受到广泛关注的研究方向本课题是在空军十五预研计划的项目资助下在姜长生导师的指导下对多传感器信息融合多目标跟踪中的存在的一些问题进行深入的研究论文主要工作与结构如下第一章本文的绪论部分首先综述了多目标跟踪的基本原理然后介绍了本文的研究背景主要包括数据关联理论自适应滤波理论和支持向量机理论的研究和发展现状最后对本文的内容加以说明第二章: 设计了一种基于目标多特征信息的支持向量机数据关联新算法利用传感器量测空间的量测偏差对支持向量机进行训练得到一个分类识别函数利用训练好的支持向量机来判断量测与航迹是否关联实现密集杂波环境中多南京航空航天大学硕士学位论文7目标的精确跟踪第三章针对雷达与红外传感器组成的多传感器信息融合多目标跟踪系统,利用目标的位置信息和速度信息设计了一种基于支持向量机的航迹关联算法,实现对多目标的实时精确跟踪第四章在雷达和红外组成的多传感器信息融合跟踪系统中将支持向量机网络与扩展Kalman 滤波结合起来形成闭环系统将从传感器的量测输出和跟踪滤波器的状态中提取和目标机动有关的特征量送入支持向量机网络估计目标的机动输入实现对机动目标的精确跟踪仿真试验说明了该算法的有效性第五章给出了本文的结论并对这一方向上下一步的工作进行展望最后是笔者对导师以及为我的研究工作提供帮助的老师同学们的致谢以及本文的参考文献支持向量机在多目标跟踪中的应用研究8第二章 基于目标多特征信息的支持向量机数据关联算法2.1引言多目标跟踪首要问题也是关键问题是如何进行有效的数据关联数据关联就是将传感器获得的观测数据与已知目标航迹相比较并最后确定正确的观测/航迹配对或建立新航迹的过程实际的传感器系统总是不可避免地存在着测量误差缺乏跟踪环境的先验知识往往不能确知目标的个数无法判定观测数据是由真实目标还是由其它虚假目标产生的这些不确定因素破坏了回波观测与其目标源之间的对应关系是导致多传感器多目标数据关联关系模糊的基本原因在数据关联方法中,有基于传统的统计检验算法如最近邻法多假设法联合概率数据关联法(JPDA)等此类方法存在跟踪不准确要求的先验知识过多容易引发数据爆炸等缺陷有基于模糊聚类的数据关联算法[4243],要求首先确定初始化聚类中心,但在目标出现机动的情况下,初始聚类中心很难确定有将传统的关联算法与神经网络相结合数据关联算法[44]在JPDA 算法基础上采用Hopfield 网络的NJPDA 算法,很好地解决了常数量级内求解复杂性问题,克服了数据爆炸,但有时无法得到全局最优解现有的数据关联方法通常仅利用了那些用于航迹更新的量测,即目标的几何位置信息,在解决目标关联时通常会出现较多的误跟和失跟现象,主要由于数据关联利用的信息比较有限,从而导致不同的目标在状态空间中不能被正确区分与辨识,改善数据关联性能的有效方法是利用更多的目标属性信息[45,46]和改进数据关联算法本文提出了一种基于目标多特征信息的支持向量机数据关联算法实现密集杂波环境中多目标的精确跟踪该算法将跟踪门的形成和数据关联融为一体一方面提高了跟踪精度又在很大程度上降低了计算量支持向量机(SVM)从理论上解决了神经网络等学习机器的过学习训练过程中的局部极小点问题正是基于支持向量机出色的学习性能本文提出了一种基于多特征信息的支持向量机数据关联新算法,对雷达目标进行数据关联取得了较好的性能南京航空航天大学硕士学位论文92.2支持向量机2.2.1最优分类面支持向量机是从线性可分情况下的最优分类面发展而来的基本思想可以用图2.1来说明图中实心点和空心点代表线性可分的两类样本H 为分类线H 1, H2分别为过各类中离分类线最近的样本且平行于H 的直线H 1和H2的间距称为分类间隔最优分类线H 不仅要将两类无误地分开训练错误率为而且要使分类间隔最大前者保证经验风险最小后者使推广性的置信范围最小真实风险最小推广到高维情况最优分类线即为最优分类面图2.1两类线性可分样本的最优分类面2.2.2支持向量机基本原理设线性可分样本集为11(,),(,),,{1,1}d N N i i x y x y x R y ∈∈+−"是类别标号d 维空间中线性判别函数的一般形式为()g x w x b=⋅+分类面方程为0w x b ⋅+= (2-1)将判别函数归一化使两类所有样本都满足()1g x≥即使离分类面最近的样本的()1g x =这样分类间隔就等于2/w因此间隔最大化等价于使w 最小为正确分类还必须满足[]10,1,2,,i i y w x b i N ⋅+−≥=" (2-2)因此满足上述条件且使w 最小的分类面就是最优分类面两类样本中分别过H 1和H2使(2-1)式等号成立的训练样本称为支持向量Support Vectors 它们支撑了最优分类面图2.1中标出的点就是支持向量。
【国家自然科学基金】_多机动目标跟踪_基金支持热词逐年推荐_【万方软件创新助手】_20140731
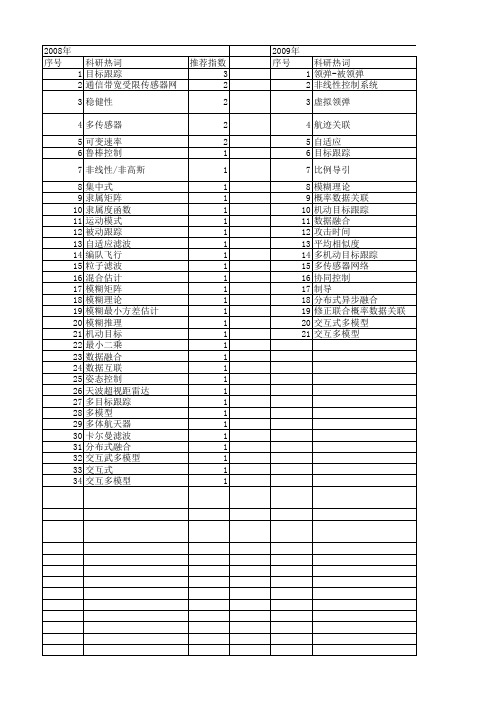
科研热词 推荐指数 目标跟踪 3 通信带宽受限传感器网络 2 稳健性 2 多传感器 2 可变速率 2 鲁棒控制 1 非线性/非高斯 1 集中式 1 隶属矩阵 1 隶属度函数 1 运动模式 1 被动跟踪 1 自适应滤波 1 编队飞行 1 粒子滤波 1 混合估计 1 模糊矩阵 1 模糊理论 1 模糊最小方差估计 1 模糊推理 1 机动目标 1 最小二乘 1 数据融合 1 数据互联 1 姿态控制 1 天波超视距雷达 1 多目标跟踪 1 多模型 1 多体航天器 1 卡尔曼滤波 1 分布式融合 1 交互武多模型 1 交互式 1 交互多模型 1
2013年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36
科研热词 推荐指数 机动目标跟踪 4 目标跟踪 3 机动目标 2 数据关联 2 信息融合 2 交互多模型 2 高斯混合基数概率假设密度 1 高斯-厄密特滤波 1 集中融合 1 跳变马尔科夫系统模型 1 角度量测 1 被动跟踪 1 被动传感器 1 纯方位跟踪 1 粒子滤波 1 相关过程噪声 1 正态截断模型 1 时差测量 1 无迹卡尔曼滤波 1 无损变换 1 数据融合 1 扩展目标 1 扩展kalman滤波 1 扩展h∞滤波 1 当前统计模型 1 弹道解算 1 密集杂波环境 1 多测角交会 1 多传感器融合 1 变采样率 1 变机构多模型 1 兵器科学与技术 1 不完全量测 1 jpda 1 imm 1 gm-phd 1
2011年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23
基于自适应卡尔曼滤波的机动目标跟踪算法
年 , lr r s a 在文 献[ ] Wae Go m n t s 1 中提出 了混合坐标 系的概念 ,
结合了两个坐标系 的优点 , 即在直角坐 标系 中进行 目标轨迹
ቤተ መጻሕፍቲ ባይዱ收稿 日期 : 1 — 6— 3 修 回日期 : 1 — 7 1 2 1 0 1 0 0 2 1 0—3
之间的关系如图1 所示 , 其中0 为目标高低角, 为目标方位
o d p ie K ma l rc mb n d w t a e in c o d n t y tm n p e c l o r i ae s se naat a v l n f t o i e i C r sa o r i ae s se a d s h r a o d n t y tm.T e ag r h i e h t i c h o t m l i a o d h h n e o o s tt t a e u a t e ut d fo c o i ae s s mst n fr t n,a d t e t h v i s te c a g fn ie sai i l g lr y r s l r m o r n t y t a somai sc r i e d e r o n o d a w h t e li
统计模 型 , 机 机 动 加 速度 可 以表 示 为一 个 时 间 相 关 过 随
程 J即 : ,
+ 2, y ) 目标方位 角为 口=ac n xy 。V k 是 零均 ra(/ ) ( ) t
值 白噪声 , 其协方差矩阵 E[ ( ) rj ] V k V () =R(} 。此时 的 J j ) 测量方程是关 于 置 ( 的线性方程。 )
结果验证 了该算法 的有效性 。
基于小采样周期的机动目标模型跟踪性能研究
基于小采样周期的机动 目标模型跟踪性 能研究
熊 久 良 ,徐 宏 ,韩 壮 志 ,封 吉 平 何 强
,
( 械 工 程 学 院光 学 与 电 子 工程 系 ,河 北 石 家 庄 O5 003) 军 0
摘要 :分 析 了小 采 样 周 期 条 件 下 “ 前 ” 计 模 型 、 于 速 度 估 计 的 自适 应 模 型 及 自适 应 常 加 速 度 模 型 , 3种 模 当 统 基 对
t e s m ewhie ACA o e ’ na cpe f r a e i u h b te h n t e o he o e sba e n h a l m d l Sdy mi r o m nc sm c e t rt a h t rm d l s d o . s a ls m p i ro . m l a lng pe i d Ke r : ne e i g t r e de ; de ; CA de ; y wo ds ma uv rn a g tmo l CS mo l S mo l ACA mod l e
Ab t a t Afe n l zn h “ u r n ” t t t a CS) d la d s l- d p i e c n t n c e e a s r c : t r a a y i g t e c r e t s a i i l( s c mo e n efa a t o s a t a c l r — v
近 年来 ,有不 少学 者对机 动 目标模 型进行 了深
入 探讨 j “ , 当前 ” 统计 ( u rnl S ai ia, C re t tt t l y sc C )模 型 是 公 认 的 较 为 典 型 的 机 动 目标 模 型 , S
目标跟踪算法的分类
主要基于两种思路:a)不依赖于先验知识,直接从图像序列中检测到运动目标,并进行目标识别,最终跟踪感兴趣的运动目标;b)依赖于目标的先验知识,首先为运动目标建模,然后在图像序列中实时找到相匹配的运动目标。
一.运动目标检测对于不依赖先验知识的目标跟踪来讲,运动检测是实现跟踪的第一步。
运动检测即为从序列图像中将变化区域从背景图像中提取出来。
运动目标检测的算法依照目标与摄像机之间的关系可以分为静态背景下运动检测和动态背景下运动检测〔一〕静态背景1.背景差2.帧差3.GMM4.光流背景减算法可以对背景的光照变化、噪声干扰以及周期性运动等进行建模,在各种不同情况下它都可以准确地检测出运动目标。
因此对于固定摄像头的情形,目前大多数的跟踪算法中都采用背景减算法来进行目标检测。
背景减算法的局限性在于它需要一个静态的固定摄像头。
〔二〕运动场通常情况下,摄像机的运动形式可以分为两种:a)摄像机的支架固定,但摄像机可以偏转、俯仰以及缩放; b)将摄像机装在某个移动的载体上。
由于以上两种情况下的背景及前景图像都在做全局运动,要准确检测运动目标的首要任务是进行图像的全局运动估计与补偿。
考虑到图像帧上各点的全局运动矢量虽不尽相同(摄像机做平移运动除外),但它们均是在同一摄像机模型下的运动,因而应遵循相同的运动模型,可以用同一模型参数来表示。
全局运动的估计问题就被归结为全局运动模型参数的估计问题,通常使用块匹配法或光流估计法来进行运动参数的估计。
块匹配基于块的运动估算和补偿可算是最通用的算法。
可以将图像分割成不同的图像块,假定同一图像小块上的运动矢量是相同的,通过像素域搜索得到最正确的运动矢量估算。
块匹配法主要有如下三个关键技术:a)匹配法则,如最大相关、最小误差等b)搜索方法,如三步搜索法、交叉搜索法等。
c) 块大小确实定,如分级、自适应等。
光流法光流估计的方法都是基于以下假设:图像灰度分布的变化完全是目标或者场景的运动引起的,也就是说,目标与场景的灰度不随时间变化。
考虑目标航向机动信息的机动目标跟踪算法
() 2
假设 传感器 的任 意两次 量测 相互 独立 , 因为 目标 的航 向不 可 能 突 变 , 刻 目标 的航 向 0 必定 在 k一1 k时 时刻 目 标航向 0 的某个邻域 内, 因此长度为 £的航向机动序列中所有元素 同号且绝对值之和大于某一给
摘 要: 传统的机动 目 标跟踪算法大多过于依赖所采用的 目 标运动模型, 没有充分利用 目标量 测序 列 中携 带的其 它有 用信 息 , 目标 机 动 时跟 踪 性 能下 降较 大。 针 对该 问题 , 出 了利 用 目 当 提 标航 向机 动序 列修 正传统 跟踪 算法 滤波值 的新算 法 。仿 真结 果表 明 , 算 法 比传 统 跟踪 算 法 的 该
跟踪精度 高 , 一种 简单 有效 的 自适 应机 动 目标 跟踪算 法。 是
关键 词 : 动 目标 跟踪 ; 向机 动 ; 机 航 自适 应
中图分 类号 :T 93 N 5
文 献标识码 : A
文章 编号 :09— 56 20 )3— 06— 3 10 3 1(0 7 0 03 0
机动 目标 跟踪 是 目标 跟 踪 中的一个难 点 , 因为采 用 的 目标 运 动模型 与 目标 实 际运 动模式 不完 全匹配 , 跟 踪过 程 中若 目标 实 施 机 动 , 感 器 可 能 丢 失 目标 。针 对 这 个 问题 , 多 学 者 提 出 了 一 些 不 同 的 解 决 方 传 许
有, 4 。 转 )
3 用 已更新 的航 向机 动序列修 正所 得到 的滤波 值 : )
1 目标航 向机动序列 的计算和 目标航 向机动 的辨识
不考虑高度, 假设 目标在水平 面内做转弯机动 。航 向机动序 列 的计算 方法 如下 。
机动目标的跟踪滤波处理
王
P ( 01 0 )=C O V [ x( o ) , x( o ) ]=P o
君, 等: 机 动 目标 的跟踪 滤 波处理
1 0 7
通过改变实际测量均值和估计初 值方差 , 分析其误 差变
化和误差方差 的变 化 , 发现 S a g e . Hu s a自适应 滤波对 不 同的 噪声污染 以及取不 同的估 计初 值 , 其 滤波 效果基 本相 同 , 即
其中:
Hale Waihona Puke E[ ( k ) ]= q , E [ V ( k ) ]= r C O V [ ( k ) , V( I j ) ]=Q , C O V [ V ( k ) , v ( j ) ]=R 式中 : 噪声均值 为 q; r和协 方差矩阵 Q、 R为未知 。
所 谓 自适 应 滤 波 就 是 在 卡 尔 曼 滤 波 进 行 最 佳 估 计 的 同
实 际 的 滤 波 误 差 。 自适 应 滤 波 方 法 有 多 种 , 下面介 绍应用较 广的 S a g e — H u s a自适 应 滤 波 。
X ( k I k ) = ( k 1 一1 )+ ( ) E ( k )
^
利用经典 的 尔 曼滤波进 行数据处理 , 需精 确知道 系统 模型和量测模 型的噪声统 计特性 , 才 能使滤波器 发挥较 高效 能, 许可得到 系统状 态 的最 优无 偏估 计 , 从 而使 滤 波器 ] 作
跟踪 滤波的 目的 是根据 已获得 的 目标 观测数 据对 目标 的状 态进行精确估 汁 。 。 。关键 是对机 动 目标 的跟踪能 力 , 主要困难在于跟踪设 定的 目标模 型 与实际 的 目标 动力 学模
型 相 匹 配 的 问 题 目标 沿 匀 速 直 航 线 运 动 , 采 用 卡 尔 曼 滤 波 技 术 可获 得 最 佳 估 计 , 但 当 目标 偏 离 匀 速 直 航 线 机 动 时 , 卡 尔 曼滤 波 可 能 会 出现 发 散 , 所 以需 采 用 自适 应 的 方 法 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
可编辑 精品文档,欢迎下载 第一章 目标跟踪基本原理与机动目标模型1.1 引言 目标跟踪问题作为科学技术发展的一个方面,设计的主要目的是可靠而精确的跟踪目标,其历史可以追溯到第二次世界大战前夕,即 1937 年世界上出现第一部跟踪雷达站 SCR-28 的时候、之后各种雷达、红外、声纳和激光等目标跟踪系统相继得到发展并且日趋完善。 传统的跟踪系统是一对一系统,即一个探测器仅连续地瞄准和跟踪一个目标。随着科学技术的进步和现代战略战术的发展,人们发现提出新的目标跟踪概念和体制是完全可能的,在过去 20 多年中,多目标跟踪的理论和方法已经获得很大发展,并已成为当今国际上十分活跃的热门研究领域之一,有些成果也已付诸于工程实际。 简单地说,目标跟踪问题可以划分为下列四类: 一个探测器跟踪一个目标 (OTO) 一个探测器跟踪多个目标 (OTM) 多个探测器跟踪一个目标 (MTO) 多个探测器跟踪多个目标 (MTM)1.2 目标跟踪的基本原理1.2.1 单机动目标跟踪基本原理 发展现代边扫描边跟踪(TWS)系统的目的是,仅在一个探测器条件下同时跟踪多个目标。然而,为达此目的,边扫描边跟踪系统必须首先很好地跟踪单个目标。一般地说,常速直线运动目标的跟踪与估计问题较为简单,而且易于处理。困难的情况表现在被跟踪目标发生机动,即目标速度的大小和方向发生变化的场合。 图 1.1 为单机动目标跟踪基本原理框图。图中目标动态特性由包含位置、速度和加速度的状态向量 X 表示,量测(观测)量 Y 被假定为含有量测噪声 V 的状态向量 1的线性组合(HX+V) ;残差(新息)向量 d 为量测(Y)与状态预测量 H X k k之差。我们约定,用大写字母 XY 表示向量,小写字母 xy 表示向量的分量。一般情况下,单机动目标跟踪为一自适应滤波过程。首先由量测(观测)量(Y)和状态预 1测量 H X k 构成残差(新息)向量 d,然后根据 d 的变化进行机动检测或者机 k动辨识. 其次按照某一准则或逻辑调整滤波增益与协方差矩阵或者实时辨识出目标机动特性,最后由滤波算法得到目标的状态估计值和预测值,从而完成单机动目标跟踪功能。 图 1.1 单机动目标跟踪基本原理框图1.2.2 单机动目标跟踪基本要素 单机动目标跟踪基本要素主要包括量测数据形成与处理,机动目标模型,机动检测与机动辨识,滤波与预测以及跟踪坐标系和滤波状态变量的选取。现分别简述之。1.2.2.1 量测数据形成与处理 量测数据通常指来自探测器输出报告的所有观测量的集合。这些观测量一般包括目标运动参数,如位置和速度,目标属性,目标类型,数目或形成以及获取量测量的时间序列等。在单机动目标跟踪技术中,量测数据主要指目标运动学参数。 量测数据既可以等周期获取,也可以变周期获取。在实际问题中常常遇到等速 ,为了提高目标状态率数据采集。量测数据大多含有噪声和杂波(多目标检测情况)估计精度,通常采用数据预处理技术以提高信噪比。目前常用的方法有数据压缩,包括等权和变权预处理以及量测资料中野值的剔除方法等技术。1.2.2.2 机动目标模型 众所周知,估计理论特别是卡尔曼滤波理论要求建立数学模型来描述与估计问题有关的物理现象。这种数学模型应把某一时刻的状态变量表为前一状态变量的函数。所定义的状态变量应为能够全面反应系统动态特性的一组维数最少的变量。一般地,状态变量与系统的能量有关,譬如在目标运动模型中,状态变量中所包含的位置元素与势能有关,速度元素与动能有关。 在目标模型构造过程中,考虑到缺乏有关目标运动的精确数据以及存在着许多不可预测的现象,如周围环境的变化及驾驶员主观操作等,只是需要引入状态噪声的概念。当目标作匀速直线运动时,加速度常常被看作是具有随机特性的扰动输入(状态噪声),并假设其服从零均值白色高斯分布,这时,卡尔曼滤波可直接使用。当目标发生诸如转弯或逃避等机动现象时,上述假设则不尽合理,机动加速度变成为非零均值时间相关的有色噪声。此时,为满足滤波需要常常采用白化噪声和状态增广方法。 机动目标模型除了考虑加速度非零均值时间相关噪声假设外,还要考虑加速度的分布特性。客观上,要求加速度函数应尽可能的描述目标机动的实际情况。从目前的机动目标模型来看,所有建模方法均考虑了目标发生机动的可能性,并建立了一种适合任何情况和任何类型目标的机动模型,我们称这种模型为全局统计模型,其典型代表是传统的可编辑 精品文档,欢迎下载 Singer 模型。然而,根据全局统计模型思想,每一种具体战术情况下的每一种具体机动在总的统计模型中的发生概率势必很小,也就是说,每一种具体战术情况下的机动模型的精度不可能足够高。因此,考虑目标当前时刻机动可能性是十分可取的,由此建立的模型称为机动目标“当前”统计模型。该模型是后面各种跟踪算法的基础,理论分析和计算机仿真证明此模型优于全局统计模型。 当然,关于加速度的分布函数,除了均匀分布(Singer 模型)和修正瑞利分布(“当前”统计模型)外,有人还采用其它分布如正态分布等。我们认为,无论采取何种分布函数,只要能更为真实的反应目标的机动实际,就是可取的。1.2.2.3 机动检测与机动辨识 机动检测与机动辨识是两种机动决策机制。如果目标出现机动,根据此机制即可确定出机动的发生时刻,估计出实际的机动参数譬如机动强度和持续时间等。 一般地,滤波过程以所假定的目标模型为基础。当目标发生机动时,实际的目标动态特性将与模型描述的不一致,从而导致跟踪误差增大,残差(新息)过程发生急剧变化。通过检测残差过程,即可对目标的机动作出某些检测,这就是机动检测决策机制的基本思想。而机动强度则靠机动模型来设定。机动检测常常发生决策滞后现象。 机动辨识是一种比机动检测更为有效的决策机制,它不仅能够确定出机动发生时刻及持续时间,而且能够实时辨识出机动(加速度)强度或大小。机动辨识的作用方式为或者由残差过程辨识出机动加速度幅度,或者根据滤波过程实时估计和预测出机动加速度大小。机动辨识的典型范例是机动目标“当前”统计模型及其自适应跟踪算法的应用。1.2.2.4 自适应滤波与预测 滤波与预测是跟踪系统的基本要素,也是估计当前和未来时刻目标运动参数如位置、速度和加速度的必要技术手段。 当目标作非机动运动时,采用基本的滤波和预测方法即可很好地跟踪目标。这些方法主要有线性自回归滤波,α-β或α-β-γ 滤波以及卡尔曼滤波等。 在实际跟踪过程中,目标往往发生机动,这时采用上述基本滤波与预测方法和机动目标模型已不能满足问题的求解,跟踪滤波器常常出现发散现象。有效的解决办法是应用基于卡尔曼滤波的各种自适应滤波与预测方法。这些方法主要有以下几种: 1 重新启动滤波增益序列; 2 增大输入噪声的方差; 3 增大目标状态估计的协方差矩阵; 4 增加目标状态维数; 5 在不同的跟踪滤波器之间切换。 前三种方法都是使跟踪滤波器的参数特别是滤波增益发生改变,后两种方法则是以某种方式修改跟踪滤波器的结构。1.2.2.5 跟踪坐标系与滤波状态变量的选取 跟踪滤波器的设计在很大程度上受下述数学模型的影响: (1) 探测器提供的量测(观测); (2) 被跟踪目标的运动。这两种模型都依赖于所采用的坐标系体制。因此,应当选择一个合适的坐标系来满足有限的计算时间和保证良好的跟踪性能这两个互相矛盾的要求。 一般来说,有两种坐标系可供选择:直角坐标系和球面坐标系。通常探测器的量测是在球面坐标系中进行的,而目标的状态方程在直角坐标系中可以线性地表示。如果仅在一种坐标系中建立目标的状态方程,要么动态方程线性,量测方程非线性;要么状态方程非线性,量测方程线性。这样,在滤波和预测之前,就必须对方程进行适当处理,避免引入模型误差。 在现代雷达跟踪系统中,方便的是同时采用地理坐标系和雷达测量坐标系,即混合坐标系。其好处是地理坐标系(直角坐标系)的参数变化率最小,除在北极附近外,地球转动的影响可以忽略不计,即地理坐标系实际是惯性坐标系;而且在该坐标系中目标状态方程是线性的,在雷达测量坐标系(球面坐标系)中,目标斜距、方位和俯仰等均可独立得到,而且量测方程也是线性的。再利用坐标变换关系,滤波与预测过程便可在地理坐标系中方便的完成。实践已证明,上述混合坐标系的选择应用很成功。 关于状态变量的选取,一般的原则是选择维数最少且能全面反映目标动态特性的一组变量,以防止计算量随状态变量数目的增加而增加。 需要指出的是,状态变量与跟踪坐标系的选择是直接相关的。Johon 已经证明,如果采用一个适当选择的坐标系,状态估计问题的计算代价可以大大减小。 另外,速度量测的引入是改善跟踪精度的一种有效手段。此方法不仅能有提高系统带宽,而且能有效地减小系统动态误差,从而提高跟踪性能。可编辑 精品文档,欢迎下载 1.2.3 多机动目标跟踪基本原理 多目标跟踪问题无论在军事或民用方面都有着十分广泛的应用,其目的是将探测器所接收到的量测数据分解为对应于不同信息源所产生的不同观测集合或轨迹。一旦轨迹被形成和确认,则被跟踪的目标数目以及相应于每一条轨迹的目标运动参数如位置、速度、加速度及目标分类特征等,均可相应地估计出来。 图 1.2 多机动目标跟踪基本原理框图 图 1.2 给出了一种简单的多机动目标跟踪基本原理框图。假定整个流程为递推过程,并且在先前扫描期间各轨迹已经形成。由探测器接收到的观测数据首先被考虑用于更新已建立的目标轨迹。跟踪门被用来确定观测/轨迹配对是否合理或者正确;数据关联则用于最后确定最合理的观测/轨迹配对,然后根据跟踪维持方法包括机动辨识及自适应滤波与预测估计出各目标轨迹的真实状态。在跟踪空间中,那些不与已经建立的目标轨迹相关的观测或回波可能来自新的目标或虚警.由跟踪起始方法可以辨别其真伪,并相应地建立新的目标档案;当某些目标逃离跟踪空间后,由跟踪终结方法立即可消除多余目标档案,减轻不必要的负载。 最后,在新的观测到达之前,由目标预测状态可以确定下一时刻的跟踪门中心和大小,并重新开始下一时刻的递推循环。1.2.4 多机动目标跟踪基本要素 多机动目标跟踪基本要素除了包括上面所阐述的单机动目标跟踪各基本要素外,还有跟踪门的形成,数据关联与跟踪维持,跟踪起始与跟踪终结,漏报与虚警等要素,下面简述之。1.2.4.1 跟踪门的形成 跟踪门的形成或关联区域的形成是多机动目标跟踪过程中首当其冲的问题。跟踪门是跟踪空间中的一块子空间,中心位于被跟踪目标的预测状态,其大小由接收正确回波的概率来确定。 跟踪门规则是将观测回波分配给已建立的目标轨迹或新目标轨迹的一种粗略检验方法。其目的有如下两点: 1 确定候选回波 当由探测器观测到的回波满足某目标的跟踪门规划时,称此回波为候选回波,并被考虑用于更新被跟踪目标的状态。注意到,有时可能多个回波同时落入某一目标的跟踪门内,同样,落入跟踪门内的候选回波最后也有可能不被用来更新目标的状态。这一点与“最邻近”和“全邻”相关方法的规定有关。 2 建立新的假定轨迹 当观测回波不落入任何已建立目标轨迹的跟踪门内是,次回波可能为新的目标回波或虚警,由此可建立起新的候选目标假定轨迹或摒弃虚警。1.2.4.2 数据关联与跟踪维持 数据关联是多目标跟踪的核心部分。数据关联过程是将候选回波跟踪门规定的输出与已知目标轨迹相比较并最后确定正确地观测/轨迹配对的过程。 当单个观测回波位于某个目标的跟踪门内时,配对过程即告实现。对于密集多回波环境,特别是近相距和轨迹交叉目标,最困难的情况出现在相关发生抵触的场合,此时,要么多个回波位于同一跟踪门内,要么单个回波位于多个跟踪门内的交集内。目前,有两种基本方法可用来解决这一复杂问题。 第一种方法是“最近邻”方法。该方法的原则是选择是统计距离最小或残差概率密度最大的回波作为目标回波,计算方法较为简单。然而,再多回波环境下,尤其对近相距和轨迹交叉目标来说,离目标预测状态最近的回波并非必定是目标回波,因此,这种方法在实际应用中常常发生误跟和丢失目标的现象。 另一种方法是“全邻”方法。该方法与“最邻近”方法的不同点在于全面考虑了跟踪门内的所有候选滤波,并根据不同相关情况计算出各概率加权系数以及所有候 “全邻”方法选回波的加权和即等效回波,然后用各等效回波更新多个目标的状态。特别适合与高密集多回波环境代表着现代跟踪技术的发展方向,其典型代表是概率数据关联方法(PDA)和联合数据关联方法JPDA。 PDA 和 JPDA 两种方法是本著作发展密集多回波环境下单机动目标和多机动目标跟踪算法的重要基础。 需要特别指出,应用先进的数据关联技术可以解决多个目标产生同一观测的问题,即目标分辨问题。例如,雷达量测技术不可能分辨出其波束内的多个近相距目标,但数据关联技术可以确定出何时在雷达波束内存在几个目标。这一点在工程上具有极其重大的应用价值。 跟踪维持即连续保持跟踪,其目的是保证被跟踪目标可分辨且不发生误跟和失跟现象。跟踪维持包括机动识别和自适应滤波与预测部分。其中机动目标的自适应滤波如何与数据关联技术相结合乃是一项困难的课题。