MATLAB-空间计量模型详细步骤
使用Matlab技术进行建模和仿真的步骤

使用Matlab技术进行建模和仿真的步骤引言:Matlab是一种功能强大的数学计算软件,被广泛应用于各个领域的科学研究和工程技术中。
其中,建模和仿真是Matlab应用的重要方面,它可以帮助工程师和研究人员分析和预测各种系统的行为。
本文将介绍使用Matlab技术进行建模和仿真的步骤,包括建立模型、定义参数、进行仿真和分析结果等。
一、确定建模目标在开始建模之前,首先需要明确建模的目标和需求。
例如,我们可以通过建模来分析电路、机械系统或者物理过程等。
只有明确了建模目标,才能选择合适的建模方法和工具。
二、选择合适的建模方法建模方法可以根据系统的特点和需求进行选择。
常用的建模方法包括物理建模、统计建模、数据驱动建模等。
物理建模是基于系统的物理原理和方程进行建模,统计建模是通过统计分析来描述系统的行为,数据驱动建模则是利用已有的数据来建立模型。
根据不同的情况,选择合适的建模方法至关重要。
三、建立模型在Matlab中,建立模型可以使用Simulink或者编程的方式。
Simulink是一种基于图形化界面的建模工具,可以通过拖拽组件和连接线来搭建模型。
编程的方式则可以使用Matlab脚本语言来描述系统的数学模型。
根据系统的特点和个人的喜好,选择适合自己的建模方式。
四、定义参数和初始条件在建立模型之后,需要定义参数和初始条件。
参数是影响系统行为的变量,可以通过Matlab的变量赋值来定义。
初始条件是模型在仿真开始之前系统的状态,也需要进行设定。
对于一些复杂的系统,可能需要对模型进行调优和参数敏感性分析等,以获取更加准确的结果。
五、进行仿真在模型建立并定义好参数和初始条件之后,就可以进行仿真了。
仿真是通过运行模型,模拟系统在不同条件下的行为。
Matlab提供了强大的仿真功能,可以灵活地设置仿真时间步长和仿真条件,进行数据记录和后续分析。
六、分析结果仿真完成后,需要对仿真结果进行分析。
Matlab提供了各种分析工具和函数,可以方便地对仿真数据进行处理和可视化。
第六讲空间计量经济学基本模型的matlab估计方案
一、Matlab使用前的入数据 第二步:调用函数,函数包含在各专业
工具箱(toolbox)内。 第三步:运行函数,输出结果。
2019/9/10
将专业函数包装入工具箱
第一步:下载专业函数包jplv7,解压。 第二步:装入工具箱(file-setpath)
2019/9/10
二、空间计量基本模型的Matlab估计 函数
一阶空间滞后模型
模型:y=ρwy+e 函数:far 使用方法:res=far(y,w) 例子:p57,example3.1
2019/9/10
空间滞后模型
模型:y=ρwy+xβ+e 函数:sar 使用方法:res=sar(y,x,w) 例子:p66,example3.4
2019/9/10
数据导入matlab
命令:load
文件:.dat格式文件;.ford格式文件 例子:load anselin.dat;load anselin.ford
命令:xlsread
文件:anselin.xls 例子:A=xlsread(anselin.xls)
2019/9/10
2019/9/10
广义空间模型
模型:y=ρw1y+xβ+u, u=λw2u+e 函数:sac 使用方法:res=sac(y,x,w1,w2) 例子:p92,example3.11
2019/9/10
人有了知识,就会具备各种分析能力, 明辨是非的能力。 所以我们要勤恳读书,广泛阅读, 古人说“书中自有黄金屋。 ”通过阅读科技书籍,我们能丰富知识, 培养逻辑思维能力; 通过阅读文学作品,我们能提高文学鉴赏水平, 培养文学情趣; 通过阅读报刊,我们能增长见识,扩大自己的知识面。 有许多书籍还能培养我们的道德情操, 给我们巨大的精神力量, 鼓舞我们前进。
MATLAB空间面板数据模型操作简介
MATLAB空间面板数据模型操作简介MATLAB安装:在民主湖资源站上下载MA TLAB 2009a,或者2010a,按照其中的安装说明安装MATLAB。
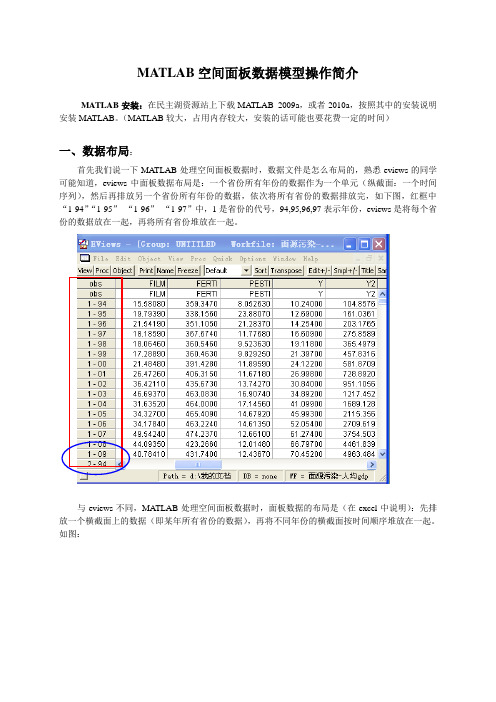
(MATLAB较大,占用内存较大,安装的话可能也要花费一定的时间)一、数据布局:首先我们说一下MA TLAB处理空间面板数据时,数据文件是怎么布局的,熟悉eviews的同学可能知道,eviews中面板数据布局是:一个省份所有年份的数据作为一个单元(纵截面:一个时间序列),然后再排放另一个省份所有年份的数据,依次将所有省份的数据排放完,如下图,红框中“1-94”“1-95”“1-96”“1-97”中,1是省份的代号,94,95,96,97表示年份,eviews是将每个省份的数据放在一起,再将所有省份堆放在一起。
与eviews不同,MATLAB处理空间面板数据时,面板数据的布局是(在excel中说明):先排放一个横截面上的数据(即某年所有省份的数据),再将不同年份的横截面按时间顺序堆放在一起。
如图:这里需要说明的是,MA TLAB中省份的序号需要与空间权重矩阵中省份一一对应,我们一般就采用《中国统计年鉴》分地区数据中省份的排列顺序。
(二阶空间权重矩阵我会在附件中给出)。
二、数据的输入:MATLAB与excel链接:在excel中点击“工具→加载宏→浏览”,找到MA TLAB的安装目录,一般来说,如果安装时没有修改安装路径,此安装目录为:C:\Programfiles\MATLAB\R2009a\toolbox\exlink,点击excllink.xla即可完成excel与MATLAB的链接。
这样的话excel中的数据就可以直接导入MATLAB中形成MATLAB的数据文件。
操作完成后excel 的加载宏界面如图:选中“Spreadsheet Link EX3.0.3 for use with MATLAB”即表示我们希望excel 与MATLAB实现链接。
matlab离散化状态空间模型 -回复
matlab离散化状态空间模型-回复如何使用MATLAB 进行离散化状态空间模型的建模和分析离散化状态空间模型是一类广泛应用于系统建模和分析的数学工具。
它在控制论和动态系统理论中有着重要的作用。
MATLAB 是一个功能强大的数学软件,可以方便地进行离散化状态空间模型的建模和分析。
本文将介绍如何使用MATLAB 进行离散化状态空间模型的建模和分析。
一、离散化状态空间模型的概念和原理离散化状态空间模型是描述离散时间系统动态特性的一种数学模型。
它由状态方程和输出方程组成。
状态方程描述了系统状态的演化规律,输出方程描述了系统输出与状态的关系。
离散时间系统的状态方程和输出方程可以用矩阵形式表示如下:x(k+1) = Ax(k) + Bu(k)y(k) = Cx(k) + Du(k)其中,x(k) 表示系统在时刻k 的状态向量,u(k) 表示系统在时刻k 的输入向量,y(k) 表示系统在时刻k 的输出向量,A、B、C、D 分别为系统的状态矩阵、输入矩阵、输出矩阵和直接传递矩阵。
离散化状态空间模型的建模需要将连续时间系统的状态空间模型进行离散化处理。
离散化的基本原理是将连续时间系统的状态方程和输出方程在一段时间内进行离散化处理,使得系统的状态和输出在该离散时间内近似地描述系统的动态特性。
二、使用MATLAB 进行离散化状态空间模型的建模和分析的步骤1. 定义系统的连续时间状态空间模型首先,需要定义连续时间状态空间模型的状态矩阵A、输入矩阵B、输出矩阵C 和直接传递矩阵D。
这些矩阵的维度和元素值反映了系统的动态特性。
例如,假设我们有一个连续时间状态空间模型:dx(t)/dt = Ax(t) + Bu(t)y(t) = Cx(t) + Du(t)其中,状态向量x(t) 的维度为n,输入向量u(t) 的维度为m,输出向量y(t) 的维度为p。
那么,我们可以用MATLAB 编写如下代码定义连续时间状态空间模型:A = [a11, a12, ..., a1n; a21, a22, ..., a2n; ..., an1, an2, ..., ann];B = [b11, b12, ..., b1m; b21, b22, ..., b2m; ..., bn1, bn2, ..., bnm];C = [c11, c12, ..., c1n; c21, c22, ..., c2n; ..., cp1, cp2, ..., cpn];D = [d11, d12, ..., d1m; d21, d22, ..., d2m; ..., dp1, dp2, ..., dpm];2. 将连续时间状态空间模型离散化在MATLAB 中,可以使用c2d 函数将连续时间状态空间模型离散化为离散时间状态空间模型。
matlab的ssest函数

matlab的ssest函数MATLAB是一种具有广泛应用的编程语言和环境,几乎覆盖了所有工程领域,SSEST函数就是其中一种常见的函数。
SSEST是一个可以进行系统状态空间模型估计的MATLAB函数,用于寻找连续时间系统的状态空间模型,并且可以帮助我们准确地估计模型参数。
下面是关于MATLAB SSEST函数的详细分步介绍:1. 数据获取首先,需要确定所使用数据的范围和类型。
我们需要一组时间序列数据,用于表示系统的输出结果。
这可以是任何数据类型,包括时间序列、概率分布和离散化数据。
然后,我们需要准备系统的时间序列数据,以获得对系统状态空间模型的准确估计。
2. 创建模型然后,我们需要根据数据创建系统状态空间模型。
我们可以使用MATLAB着名的State-Space Modeling函数(sys=tf2ss(tf))来创建状态空间模型。
tf2ss要求输入系统的传递函数,并输出状态空间模型矩阵。
可以在MATLAB终端调用该函数,并将其存储在一个变量中以进行后续计算。
3. 借助SSEST函数估算参数MATLAB中可以使用SSEST函数来估算我们的状态空间模型。
在MATLAB命令窗口中输入“help ssest”或“doc ssest”可以查看该函数的帮助文档。
首先我们需要在SSEST函数中输入系统状态空间模型,指定数据类型,系统阶数和系统的编号。
SSEST函数的输出将为您提供实现系统性能所需的参数,包括状态空间矩阵,噪声协方差矩阵和卡尔曼增益矩阵。
4. 模型分析和调整在获得参数后,我们可以对状态空间模型进行分析和调整。
我们可以通过Matlab的plot函数来绘制输出,以及使用Matlab的step函数来测试各种参数设置的结果。
这些结果可以帮助我们确定哪些参数设置可以改进系统性能。
5. 重复以上步骤使用SSEST更准确地估算状态空间模型的步骤可以多次进行。
将上述过程多次执行可以逐渐优化模型参数,并获得更准确的估计结果。
实验一 用MATLAB分析状态空间模型
实验一 用MATLAB 分析状态空间模型1、实验设备MATLAB 软件2、实验目的① 学习系统状态空间表达式的建立方法、了解系统状态空间表达式与传递函数相互转换的方法;② 通过编程、上机调试,掌握系统状态空间表达式与传递函数相互转换方法。
3、实验原理说明用MATLAB 分析状态空间模型4、实验步骤① 根据所给系统的传递函数或A 、B 、C 矩阵,依据系统的传递函数阵和状态空间表达式之间的关系式,采用MATLAB 编程。
② 在MATLAB 界面下调试程序,并检查是否运行正确。
习题1:已知系统的传递函数为(1) 将其输入到MATLAB 工作空间;(2) 获得系统的状体空间模型。
解:在MATLAB 工作空间中输入num=[2];den=[1 6 11 6];G=tf(num,den) G1=ss(G) 322()6116G s s s s =+++得到系统的状态空间模型:num=[2];den=[1 6 11 6];G=tf(num,den)G1=ss(G)[A,B,C,D]=tf2ss(num,den)因此,所考虑传递函数的一个状态空间实现是:1611611210020301030x x x x x x μ---⎛⎫⎛⎫⎛⎫⎛⎫ ⎪ ⎪⎪ ⎪=+ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎪ ⎪⎝⎭⎝⎭⎝⎭⎝⎭习题2:已知系统的状态空间模型为(1) 将其输入到MATLAB 工作空间;(2) 求系统的传递函数。
A=[-5 -1;3 -1];B=[2;5];C=[1 2];D=[0];G=ss(A, B, C, D)G1=tf(G)所以系统的传递函数为:G =x1y u x x ]2[521315=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡---='12 s + 59 -------------s^2 + 6 s + 8。
matlab建模的一般步骤
matlab建模的一般步骤以matlab建模的一般步骤为标题,写一篇文章一、引言在科学研究和工程应用中,建立数学模型是解决问题的重要手段之一。
数学模型可以帮助我们理解问题的本质,并通过模拟和预测来指导实际操作。
而在数学模型的建立过程中,使用计算工具进行模拟和分析就显得尤为重要。
MATLAB作为一种强大的数值计算工具,能够有效地辅助我们进行模型的建立和分析。
本文将介绍以MATLAB建模的一般步骤,帮助读者更好地理解该过程。
二、问题定义在进行建模之前,首先需要明确问题的定义。
即明确要解决的问题是什么,需要研究的对象是什么,以及需要得到的结果是什么。
问题定义的明确性将有助于我们在后续的建模过程中更加专注和有针对性地进行研究。
三、数据收集和处理在建立模型之前,我们需要收集与问题相关的数据。
这些数据可以是实验数据、观测数据或其他已知信息。
收集到的数据可能包含噪声或不完整,因此我们需要进行数据处理,例如去除噪声、填补缺失值等。
MATLAB提供了丰富的数据处理函数和工具箱,可以帮助我们高效地处理数据。
四、建立数学模型在数据收集和处理完毕后,我们可以根据问题定义和数据特征来建立数学模型。
数学模型是对实际问题的抽象和简化,通过数学语言来描述问题的本质和规律。
在MATLAB中,我们可以使用符号运算工具箱来建立符号模型,或者使用数值计算工具箱来建立数值模型。
根据问题的具体情况,选择合适的建模方法和工具。
五、模型求解模型建立完成后,我们需要对模型进行求解。
求解模型的过程通常涉及到数值计算、优化算法、方程求解等。
在MATLAB中,我们可以使用内置的求解函数,也可以根据具体情况编写自定义的求解算法。
通过模型的求解,我们可以得到问题的结果和解答。
六、模型验证和评估模型求解完成后,我们需要对模型进行验证和评估。
验证模型的准确性和可靠性是建模过程中的重要环节。
我们可以通过与实验数据或其他可靠数据进行对比,检验模型的拟合程度和预测能力。
空间计量学模型选择的步骤
空间计量学模型选择的步骤选择空间计量学模型的步骤可以分为以下几个:1. 定义研究问题和目标:明确研究的问题和目标,确定需要分析的空间关系是什么,以及希望从数据中得出什么样的结论。
2. 数据收集与处理:收集所需的空间数据,并对其进行处理和清洗。
这包括数据的获取、整理、转换和清理等过程。
3. 探索性空间数据分析(Exploratory Spatial Data Analysis,ESDA):使用可视化和描述性统计方法,对空间数据的空间分布特征进行分析,包括局部空间自相关、全局空间自相关、空间聚类等指标。
4. 空间计量模型选择:根据研究问题和目标,选择合适的空间计量模型。
常见的空间计量模型包括空间自回归模型(Spatial Autoregressive Model,SAR)、空间误差模型(Spatial Error Model,SEM)、空间滤波模型(Spatial Filtering Model)等。
根据数据的特点、模型的假设和要求等因素进行模型选择。
5. 模型估计与检验:对选择的空间计量模型进行参数估计和统计检验,检验模型的拟合程度和假设前提的合理性。
常见的估计方法包括最大似然估计和广义矩估计等。
6. 结果解释与推断:根据模型估计的结果,解释和推断空间数据之间的关系,得出研究问题的结论。
可以使用空间依存函数、空间残差图等方法,对模型的结果进行解读和验证。
7. 敏感性分析和模型改进:根据对结果的敏感性分析,对模型进行改进和优化,比如引入额外的变量或考虑非线性关系等。
检验改进后的模型是否更能解释数据和得出合理的结论。
8. 结果应用和决策支持:将分析结果应用于实际问题和决策过程中,提供决策支持和政策建议。
空间计量步骤
空间计量是一种应用空间数据分析和地理信息系统的方法,用于探索空间数据之间的关系和空间变化的模式。
空间计量的步骤通常包括以下几个方面:
1. 数据准备:空间计量的第一步是准备空间数据和相关属性数据,这些数据可以来自于各种数据源,例如遥感影像、地图数据、传感器数据等。
数据准备的过程中需要进行数据清洗、转换和整合,以便于后续的空间计量分析。
2. 空间关系建模:空间计量的核心是建立空间数据之间的关系模型,并通过统计方法和空间分析技术来验证空间数据之间的相关性和依赖关系。
常用的空间模型包括空间自相关模型、空间误差模型、空间滞后模型等。
3. 模型评估:建立空间模型后,需要对模型进行评估以确定其有效性和可靠性。
评估指标包括拟合优度、残差分布、参数显著性等,并通过各种图表和统计方法来展示分析结果。
4. 预测和推断:空间计量的最终目的是进行预测和推断,以便进行决策和规划。
预测和推断可以通过空间模型来实现,例如预测未来的空间变化趋势、分析空间决策的影响等。
需要注意的是,空间计量是一种比较复杂的分析方法,需要具备一定的地理信息系统和统计学知识,同时也需要熟悉相关软件和工具,例如ArcGIS、R或者Python等。
利用Matlab构建数学模型及求解方法详解
利用Matlab构建数学模型及求解方法详解引言数学模型在现代科学研究和实际应用中起着重要的作用。
利用数学模型,我们可以准确地描述问题,分析问题,并提供解决问题的方法。
而Matlab作为一种强大的数学软件,能够帮助我们构建数学模型并求解问题。
本文将详细介绍利用Matlab构建数学模型的方法和求解模型的技巧。
一、数学模型的基本概念数学模型是对真实世界问题的简化和抽象,以数学语言和符号进行表达。
一个好的数学模型应当能够准确地描述问题的本质,并能够提供解决问题的方法。
构建数学模型的基本步骤如下:1. 确定问题的目标和限制条件:首先,我们需要明确问题的目标是什么,以及有哪些限制条件需要考虑。
这些目标和限制条件将在后续的模型构建中起到重要的作用。
2. 建立假设:在构建数学模型时,我们通常需要做一些合理的假设。
这些假设可以简化问题,使得模型更易于建立和求解。
3. 确定数学表达式:根据问题的具体情况,我们需要选择适当的数学表达式来描述问题。
这些数学表达式可以是代数方程、微分方程、最优化问题等。
4. 参数估计:数学模型中通常会涉及到一些未知参数,我们需要通过实验数据或者其他手段来估计这些参数的值。
参数的准确估计对于模型的求解和结果的可靠性至关重要。
二、利用Matlab构建数学模型的方法在利用Matlab构建数学模型时,我们通常可以使用以下方法:1. 利用符号计算工具箱:Matlab中提供了丰富的符号计算工具箱,可以帮助我们处理复杂的代数方程和符号表达式。
通过符号计算工具箱,我们可以方便地推导出数学模型的方程式。
2. 利用数值计算工具箱:Matlab中提供了强大的数值计算工具箱,可以帮助我们求解各种数学问题。
例如,求解微分方程的常用方法有欧拉法、龙格-库塔法等,都可以在Matlab中轻松实现。
3. 利用优化工具箱:在一些优化问题中,我们需要求解最优解。
Matlab的优化工具箱提供了多种求解最优化问题的算法,如线性规划、非线性规划等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.excel与MATLAB链接:Excel:选项——加载项——COM加载项——转到——没有勾选项2. MATLAB安装目录中寻找toolbox——exlink——点击,启用宏E:\MATLAB\toolbox\exlink然后,Excel中就出现MATLAB工具(注意Excel中的数据:)3.启动matlab(1)点击start MATLAB(2)senddata to matlab ,并对变量矩阵变量进行命名(注意:选取变量为数值,不包括各变量)(data表中数据进行命名)(空间权重进行命名)(3)导入MATLAB中的两个矩阵变量就可以看见4.将elhorst和jplv7两个程序文件夹复制到MATLAB安装目录的toolbox文件夹5.设置路径:6.输入程序,得出结果T=30;N=46;W=norm(W1);y=A(:,3);x=A(:,[4,6]);xconstant=ones(N*T,1); [nobs K]=size(x);results=ols(y,[xconstant x]);vnames=strvcat('logcit','intercept','logp','logy');prt_reg(results,vnames,1);sige=results.sige*((nobs-K)/nobs);loglikols=-nobs/2*log(2*pi*sige)-1/(2*sige)*results.resid'*results.resid % The (robust)LM tests developed by ElhorstLMsarsem_panel(results,W,y,[xconstant x]); % (Robust) LM tests 解释附录:静态面板空间计量经济学一、OLS静态面板编程1、普通面板编程T=30;N=46;W=normw(W1);y=A(:,3);x=A(:,[4,6]);xconstant=ones(N*T,1);[nobs K]=size(x);results=ols(y,[xconstant x]);vnames=strvcat('logcit','intercept','logp','logy');prt_reg(results,vnames,1);sige=results.sige*((nobs-K)/nobs);loglikols=-nobs/2*log(2*pi*sige)-1/(2*sige)*results.resid'*results.resid % The (robust)LM tests developed by ElhorstLMsarsem_panel(results,W,y,[xconstant x]); % (Robust) LM tests2、空间固定OLS (spatial-fixed effects)T=30;N=46;W=normw(W1);y=A(:,3);x=A(:,[4,6]);xconstant=ones(N*T,1);[nobs K]=size(x);model=1;[ywith,xwith,meanny,meannx,meanty,meantx]=demean(y,x,N,T,model );results=ols(ywith,xwith);vnames=strvcat('logcit','logp','logy'); % should be changed if x is changedprt_reg(results,vnames);sfe=meanny-meannx*results.beta; % including the constant term yme = y - mean(y);et=ones(T,1);error=y-kron(et,sfe)-x*results.beta;rsqr1 = error'*error;rsqr2 = yme'*yme;FE_rsqr2 = 1.0 - rsqr1/rsqr2 % r-squared including fixed effectssige=results.sige*((nobs-K)/nobs);logliksfe=-nobs/2*log(2*pi*sige)-1/(2*sige)*results.resid'*results.resid LMsarsem_panel(results,W,ywith,xwith); % (Robust) LM tests3、时期固定OLS(time-period fixed effects)T=30;N=46;W=normw(W1);y=A(:,3);x=A(:,[4,6]);xconstant=ones(N*T,1);[nobs K]=size(x);model=2;[ywith,xwith,meanny,meannx,meanty,meantx]=demean(y,x,N,T,model );results=ols(ywith,xwith);vnames=strvcat('logcit','logp','logy'); % should be changed if x is changedprt_reg(results,vnames);tfe=meanty-meantx*results.beta; % including the constant termyme = y - mean(y);en=ones(N,1);error=y-kron(tfe,en)-x*results.beta;rsqr1 = error'*error;rsqr2 = yme'*yme;FE_rsqr2 = 1.0 - rsqr1/rsqr2 % r-squared including fixed effectssige=results.sige*((nobs-K)/nobs);logliktfe=-nobs/2*log(2*pi*sige)-1/(2*sige)*results.resid'*results.resid LMsarsem_panel(results,W,ywith,xwith); % (Robust) LM tests4、空间与时间双固定模型T=30;N=46;W=normw(W1);y=A(:,3);x=A(:,[4,6]);xconstant=ones(N*T,1);[nobs K]=size(x);model=3;[ywith,xwith,meanny,meannx,meanty,meantx]=demean(y,x,N,T,model );results=ols(ywith,xwith);vnames=strvcat('logcit','logp','logy'); % should be changed if x is changedprt_reg(results,vnames)en=ones(N,1);et=ones(T,1);intercept=mean(y)-mean(x)*results.beta;sfe=meanny-meannx*results.beta-kron(en,intercept);tfe=meanty-meantx*results.beta-kron(et,intercept);yme = y - mean(y);ent=ones(N*T,1);error=y-kron(tfe,en)-kron(et,sfe)-x*results.beta-kron(ent,intercept); rsqr1 = error'*error;rsqr2 = yme'*yme;FE_rsqr2 = 1.0 - rsqr1/rsqr2 % r-squared including fixed effects sige=results.sige*((nobs-K)/nobs);loglikstfe=-nobs/2*log(2*pi*sige)-1/(2*sige)*results.resid'*results.residLMsarsem_panel(results,W,ywith,xwith); % (Robust) LM tests二、静态面板SAR模型1、无固定效应(No fixed effects)T=30;N=46;W=normw(W1);y=A(:,[3]);x=A(:,[4,6]);for t=1:Tt1=(t-1)*N+1;t2=t*N;wx(t1:t2,:)=W*x(t1:t2,:);endxconstant=ones(N*T,1);[nobs K]=size(x);info.lflag=0;info.model=0;info.fe=0;results=sar_panel_FE(y,[xconstant x],W,T,info);vnames=strvcat('logcit','intercept','logp','logy');prt_spnew(results,vnames,1)% Print out effects estimatesspat_model=0;direct_indirect_effects_estimates(results,W,spat_model);panel_effects_sar(results,vnames,W);2、空间固定效应(Spatial fixed effects)T=30;N=46;W=normw(W1);y=A(:,[3]);x=A(:,[4,6]);for t=1:Tt1=(t-1)*N+1;t2=t*N;wx(t1:t2,:)=W*x(t1:t2,:);endxconstant=ones(N*T,1);[nobs K]=size(x);info.lflag=0;info.model=1;info.fe=0;results=sar_panel_FE(y,x,W,T,info);vnames=strvcat('logcit','logp','logy');prt_spnew(results,vnames,1)% Print out effects estimatesspat_model=0;direct_indirect_effects_estimates(results,W,spat_model);panel_effects_sar(results,vnames,W);3、时点固定效应(Time period fixed effects)T=30;N=46;W=normw(W1);y=A(:,[3]);x=A(:,[4,6]);for t=1:Tt1=(t-1)*N+1;t2=t*N;wx(t1:t2,:)=W*x(t1:t2,:);endxconstant=ones(N*T,1);[nobs K]=size(x);info.lflag=0; % required for exact resultsinfo.model=2;info.fe=0; % Do not print intercept and fixed effects; use info.fe=1 to turn onresults=sar_panel_FE(y,x,W,T,info);vnames=strvcat('logcit','logp','logy');prt_spnew(results,vnames,1)% Print out effects estimatesspat_model=0;direct_indirect_effects_estimates(results,W,spat_model);panel_effects_sar(results,vnames,W);4、双固定效应(Spatial and time period fixed effects)T=30;N=46;W=normw(W1);y=A(:,[3]);x=A(:,[4,6]);for t=1:Tt1=(t-1)*N+1;t2=t*N;wx(t1:t2,:)=W*x(t1:t2,:);endxconstant=ones(N*T,1);[nobs K]=size(x);info.lflag=0; % required for exact resultsinfo.model=3;info.fe=0; % Do not print intercept and fixed effects; use info.fe=1 to turn onresults=sar_panel_FE(y,x,W,T,info);vnames=strvcat('logcit','logp','logy');prt_spnew(results,vnames,1)% Print out effects estimatesspat_model=0;direct_indirect_effects_estimates(results,W,spat_model);panel_effects_sar(results,vnames,W);三、静态面板SDM模型1、无固定效应(No fixed effects)T=30;N=46;W=normw(W1);y=A(:,[3]);x=A(:,[4,6]);for t=1:Tt1=(t-1)*N+1;t2=t*N;wx(t1:t2,:)=W*x(t1:t2,:);endxconstant=ones(N*T,1);[nobs K]=size(x);info.lflag=0;info.model=0;info.fe=0;results=sar_panel_FE(y,[xconstant x wx],W,T,info);vnames=strvcat('logcit','intercept','logp','logy','W*logp','W*logy');prt_spnew(results,vnames,1)% Print out effects estimatesspat_model=1;direct_indirect_effects_estimates(results,W,spat_model);panel_effects_sdm(results,vnames,W);2、空间固定效应(Spatial fixed effects)T=30;N=46;W=normw(W1);y=A(:,[3]);x=A(:,[4,6]);for t=1:Tt1=(t-1)*N+1;t2=t*N;wx(t1:t2,:)=W*x(t1:t2,:);endxconstant=ones(N*T,1);[nobs K]=size(x);info.lflag=0; % required for exact resultsinfo.model=1;info.fe=0; % Do not print intercept and fixed effects; use info.fe=1 to turn onresults=sar_panel_FE(y,[x wx],W,T,info);vnames=strvcat('logcit','logp','logy','W*logp','W*logy');prt_spnew(results,vnames,1)% Print out effects estimatesspat_model=1;direct_indirect_effects_estimates(results,W,spat_model);panel_effects_sdm(results,vnames,W);3、时点固定效应(Time period fixed effects)T=30;N=46;W=norm(W1);y=A(:,[3]);x=A(:,[4,6]);for t=1:Tt1=(t-1)*N+1;t2=t*N;wx(t1:t2,:)=W*x(t1:t2,:);endxconstant=ones(N*T,1);[nobs K]=size(x);info.lflag=0; % required for exact resultsinfo.model=2;info.fe=0; % Do not print intercept and fixed effects; use info.fe=1 to turn on% New routines to calculate effects estimatesresults=sar_panel_FE(y,[x wx],W,T,info);vnames=strvcat('logcit','logp','logy','W*logp','W*logy');% Print out coefficient estimatesprt_spnew(results,vnames,1)% Print out effects estimatesspat_model=1;direct_indirect_effects_estimates(results,W,spat_model);panel_effects_sdm(results,vnames,W)4、双固定效应(Spatial and time period fixed effects)T=30;N=46;W=normw(W1);y=A(:,[3]);x=A(:,[4,6]);for t=1:Tt1=(t-1)*N+1;t2=t*N;wx(t1:t2,:)=W*x(t1:t2,:);endxconstant=ones(N*T,1);[nobs K]=size(x);info.bc=0;info.lflag=0; % required for exact resultsinfo.model=3;info.fe=0; % Do not print intercept and fixed effects; use info.fe=1 to turn onresults=sar_panel_FE(y,[x wx],W,T,info);vnames=strvcat('logcit','logp','logy','W*logp','W*logy');prt_spnew(results,vnames,1)% Print out effects estimatesspat_model=1;direct_indirect_effects_estimates(results,W,spat_model);panel_effects_sdm(results,vnames,W)wald test spatial lag% Wald test for spatial Durbin model against spatial lag modelbtemp=results.parm;varcov=results.cov;Rafg=zeros(K,2*K+2);for k=1:KRafg(k,K+k)=1; % R(1,3)=0 and R(2,4)=0;endWald_spatial_lag=(Rafg*btemp)'*inv(Rafg*varcov*Rafg')*Rafg*btemp prob_spatial_lag=1-chis_cdf (Wald_spatial_lag, K)wald test spatial error% Wald test spatial Durbin model against spatial error modelR=zeros(K,1);for k=1:KR(k)=btemp(2*K+1)*btemp(k)+btemp(K+k); % k changed in 1,7/12/2010% R(1)=btemp(5)*btemp(1)+btemp(3);% R(2)=btemp(5)*btemp(2)+btemp(4);endRafg=zeros(K,2*K+2);for k=1:KRafg(k,k) =btemp(2*K+1); % k changed in 1, 7/12/2010Rafg(k,K+k) =1;Rafg(k,2*K+1)=btemp(k);% Rafg(1,1)=btemp(5);Rafg(1,3)=1;Rafg(1,5)=btemp(1);% Rafg(2,2)=btemp(5);Rafg(2,4)=1;Rafg(2,5)=btemp(2);endWald_spatial_error=R'*inv(Rafg*varcov*Rafg')*Rprob_spatial_error=1-chis_cdf (Wald_spatial_error,K)LR test spatial lagresultssar=sar_panel_FE(y,x,W,T,info);LR_spatial_lag=-2*(resultssar.lik-results.lik)prob_spatial_lag=1-chis_cdf (LR_spatial_lag,K)LR test spatial errorresultssem=sem_panel_FE(y,x,W,T,info);LR_spatial_error=-2*(resultssem.lik-results.lik)prob_spatial_error=1-chis_cdf (LR_spatial_error,K)5、空间随机效应与时点固定效应模型T=30;N=46;W=normw(W1);y=A(:,[3]);x=A(:,[4,6]);for t=1:Tt1=(t-1)*N+1;t2=t*N;wx(t1:t2,:)=W*x(t1:t2,:);endxconstant=ones(N*T,1);[nobs K]=size(x);[ywith,xwith,meanny,meannx,meanty,meantx]=demean(y,[x wx],N,T,2); % 2=time dummiesinfo.model=1;results=sar_panel_RE(ywith,xwith,W,T,info);prt_spnew(results,vnames,1)spat_model=1;direct_indirect_effects_estimates(results,W,spat_model);panel_effects_sdm(results,vnames,W)wald test spatial lagbtemp=results.parm(1:2*K+2);varcov=results.cov(1:2*K+2,1:2*K+2);Rafg=zeros(K,2*K+2);for k=1:KRafg(k,K+k)=1; % R(1,3)=0 and R(2,4)=0;endWald_spatial_lag=(Rafg*btemp)'*inv(Rafg*varcov*Rafg')*Rafg*btempprob_spatial_lag= 1-chis_cdf (Wald_spatial_lag, K)wald test spatial errorR=zeros(K,1);for k=1:KR(k)=btemp(2*K+1)*btemp(k)+btemp(K+k); % k changed in 1,7/12/2010% R(1)=btemp(5)*btemp(1)+btemp(3);% R(2)=btemp(5)*btemp(2)+btemp(4);endRafg=zeros(K,2*K+2);for k=1:KRafg(k,k) =btemp(2*K+1); % k changed in 1, 7/12/2010 Rafg(k,K+k) =1;Rafg(k,2*K+1)=btemp(k);% Rafg(1,1)=btemp(5);Rafg(1,3)=1;Rafg(1,5)=btemp(1);% Rafg(2,2)=btemp(5);Rafg(2,4)=1;Rafg(2,5)=btemp(2);endWald_spatial_error=R'*inv(Rafg*varcov*Rafg')*Rprob_spatial_error= 1-chis_cdf (Wald_spatial_error,K)LR test spatial lagresultssar=sar_panel_RE(ywith,xwith(:,1:K),W,T,info);LR_spatial_lag=-2*(resultssar.lik-results.lik)prob_spatial_lag=1-chis_cdf (LR_spatial_lag,K)LR test spatial errorresultssem=sem_panel_RE(ywith,xwith(:,1:K),W,T,info);LR_spatial_error=-2*(resultssem.lik-results.lik)prob_spatial_error=1-chis_cdf (LR_spatial_error,K)四、静态面板SEM模型1、无固定效应(No fixed effects)T=30;N=46;W=normw(W1);y=A(:,[3]);x=A(:,[4,6]);for t=1:Tt1=(t-1)*N+1;t2=t*N;wx(t1:t2,:)=W*x(t1:t2,:);endxconstant=ones(N*T,1);[nobs K]=size(x);info.lflag=0;info.model=0;info.fe=0;results=sem_panel_FE(y,[xconstant x],W,T,info);vnames=strvcat('logcit','intercept','logp','logy');prt_spnew(results,vnames,1)% Print out effects estimatesspat_model=0;direct_indirect_effects_estimates(results,W,spat_model); panel_effects_sar(results,vnames,W);2、空间固定效应(Spatial fixed effects)T=30;N=46;W=normw(W1);y=A(:,[3]);x=A(:,[4,6]);for t=1:Tt1=(t-1)*N+1;t2=t*N;wx(t1:t2,:)=W*x(t1:t2,:);endxconstant=ones(N*T,1);[nobs K]=size(x);info.lflag=0;info.model=1;info.fe=0;results=sem_panel_FE(y,x,W,T,info);vnames=strvcat('logcit','logp','logy');prt_spnew(results,vnames,1)% Print out effects estimatesspat_model=0;direct_indirect_effects_estimates(results,W,spat_model); panel_effects_sar(results,vnames,W);3、时点固定效应(Time period fixed effects)T=30;N=46;W=normw(W1);y=A(:,[3]);x=A(:,[4,6]);for t=1:Tt1=(t-1)*N+1;t2=t*N;wx(t1:t2,:)=W*x(t1:t2,:);endxconstant=ones(N*T,1);[nobs K]=size(x);info.lflag=0; % required for exact resultsinfo.model=2;info.fe=0; % Do not print intercept and fixed effects; use info.fe=1 to turn onresults=sem_panel_FE(y,x,W,T,info);vnames=strvcat('logcit','logp','logy');prt_spnew(results,vnames,1)% Print out effects estimatesspat_model=0;direct_indirect_effects_estimates(results,W,spat_model);panel_effects_sar(results,vnames,W);4、双固定效应(Spatial and time period fixed effects)T=30;N=46;W=normw(W1);y=A(:,[3]);x=A(:,[4,6]);for t=1:Tt1=(t-1)*N+1;t2=t*N;wx(t1:t2,:)=W*x(t1:t2,:);endxconstant=ones(N*T,1);[nobs K]=size(x);info.lflag=0; % required for exact resultsinfo.model=3;info.fe=0; % Do not print intercept and fixed effects; use info.fe=1 to turn onresults=sem_panel_FE(y,x,W,T,info);vnames=strvcat('logcit','logp','logy');prt_spnew(results,vnames,1)% Print out effects estimatesspat_model=0;direct_indirect_effects_estimates(results,W,spat_model);panel_effects_sar(results,vnames,W);五、静态面板SDEM模型1、无固定效应(No fixed effects)T=30;N=46;W=normw(W1);y=A(:,[3]);x=A(:,[4,6]);for t=1:Tt1=(t-1)*N+1;t2=t*N;wx(t1:t2,:)=W*x(t1:t2,:);endxconstant=ones(N*T,1);[nobs K]=size(x);info.lflag=0;info.model=0;info.fe=0;results=sem_panel_FE(y,[xconstant x wx],W,T,info);vnames=strvcat('logcit','intercept','logp','logy','W*logp','W*logy'); prt_spnew(results,vnames,1)% Print out effects estimatesspat_model=1;direct_indirect_effects_estimates(results,W,spat_model);panel_effects_sdm(results,vnames,W);2、空间固定效应(Spatial fixed effects)T=30;N=46;W=normw(W1);y=A(:,[3]);x=A(:,[4,6]);for t=1:Tt1=(t-1)*N+1;t2=t*N;wx(t1:t2,:)=W*x(t1:t2,:);endxconstant=ones(N*T,1);[nobs K]=size(x);info.lflag=0; % required for exact resultsinfo.model=1;info.fe=0; % Do not print intercept and fixed effects; use info.fe=1 to turn onresults=sem_panel_FE(y,[x wx],W,T,info);vnames=strvcat('logcit','logp','logy','W*logp','W*logy');prt_spnew(results,vnames,1)% Print out effects estimatesspat_model=1;direct_indirect_effects_estimates(results,W,spat_model);panel_effects_sdm(results,vnames,W);3、时点固定效应(Time period fixed effects)T=30;N=46;W=normw(W1);y=A(:,[3]);x=A(:,[4,6]);for t=1:Tt1=(t-1)*N+1;t2=t*N;wx(t1:t2,:)=W*x(t1:t2,:);endxconstant=ones(N*T,1);[nobs K]=size(x);info.lflag=0; % required for exact resultsinfo.model=2;info.fe=0; % Do not print intercept and fixed effects; use info.fe=1 to turn on% New routines to calculate effects estimatesresults=sem_panel_FE(y,[x wx],W,T,info);vnames=strvcat('logcit','logp','logy','W*logp','W*logy');% Print out coefficient estimatesprt_spnew(results,vnames,1)% Print out effects estimatesspat_model=1;direct_indirect_effects_estimates(results,W,spat_model);panel_effects_sdm(results,vnames,W)4、双固定效应(Spatial and time period fixed effects)T=30;N=46;W=normw(W1);y=A(:,[3]);x=A(:,[4,6]);for t=1:Tt1=(t-1)*N+1;t2=t*N;wx(t1:t2,:)=W*x(t1:t2,:);endxconstant=ones(N*T,1);[nobs K]=size(x);info.bc=0;info.lflag=0; % required for exact resultsinfo.model=3;info.fe=0; % Do not print intercept and fixed effects; use info.fe=1 to turn onresults=sem_panel_FE(y,[x wx],W,T,info);vnames=strvcat('logcit','logp','logy','W*logp','W*logy');prt_spnew(results,vnames,1)% Print out effects estimatesspat_model=1;direct_indirect_effects_estimates(results,W,spat_model); panel_effects_sdm(results,vnames,W)。