绕线式电动机转子串电阻调速方法
第二章--绕线式异步电动机串级调速系统
b.起动控制:控制逆变角,使在起动开始的瞬间,Ud与Uβ的差值能产生 足够大的 Id ,以满足所需的电磁转矩,但又不超过允许的电流值,这样电动 机就可在一定的动态转矩下加速起动。
随着转速的增高,相应地增大角以减小值 Uβ ,从而维持加速过程中动态 转矩基本恒定 。
30
(2)调速
a.调速原理:通过改 变角的大小调节电动机 的转速。
由于电机在 低于同步转速 下工作,故称 为次同步转速 的电动运行。
sn
0 n1
~
P1 Pm
(1-s)Pm
CU
sPm
10
次同步速度电动运行状态
sPm
Te
12
不断加大+Eadd, s n
就可提高电机的转 速。当接近额定转
1
2n1
SP
速时,如继续加大
+Eadd,电机将加
P
速到s<0的新的稳
Pm
态下工作,即电机
转子电流 I2 的增大,会引起交流电动机
拖动转矩的增大,设原来电机拖动转矩与负载 相等,处于平衡状态,串入附加电势引起电 动机升速,在升速的过程中,随着速度增加, 转差率S减小,分子中sE2减小,电流也减小, 使拖动转矩减小后再次与负载平衡,降速过程 最后会在某一个较高的速度下重新稳定运行。
* 这种向上调速的情况称为高于同步速的串级调速。(超同步串调) 9
一.串级调速的原理 二.串级调速的基本运行状态及功率关系 三.附加电动势的实现 四.次同步串级调速主电路
2
一. 串级调速的原理
转子串电阻调速方法有什么缺点?
我们知道,对于绕线转子异步电动机,可以在其 转子回路串入电阻来减小电流,增大转差率,从而改 变转速。这种方法就是转子串电阻调速方法。
绕线式异步电动机转子串电阻的调速控制
一课题背景21启动前的准备32启动控制33制动控制34调速控制过程4二任务要求4三设计思路51主电路52.PLC接线图63. I/O分配64.程序梯形图75.程序调试86.调试完成错误!未定义书签。
总结10一课题背景绕线式异步电动机转子串电阻的调速控制线路,对调速无特殊要求的生产机械,可以采用绕线式异步电动机拖动,绕线式转子异步电动机转子串电阻调速控制电路,按照时间原则启动、能耗制动的控制线路如图所示:工作原理分析如下1启动前的准备先讲主令控制器SA的手柄置到“0”位,再合上电源开关QS1,QS2,则有:(1)零位继电器KV线圈通电并自锁。
(2)KT1,KT2线圈得电,其延时闭合的动断触点瞬时打开,确保KM1,KM2线圈断电。
2启动控制将SA的手柄推向3位,SA的触点SA1,SA2,SA3,均接通,KM线圈通电。
则有:(1)KM的主触点闭合,电动机接入交流电源,电动机在转子串两段电阻的情况下启动。
同时,KT线圈得电,KT延时断开的动合触点闭合。
(2)KM的动断触点打开,KT1线圈断点开始延时,当延时结束时,KT1动断触点闭合,KM1线圈通电,KM1的动合触点闭合切除一段电阻R1,同时KM1的动断触点断开,KT2线圈断电开始延时,当延时结束时,KT2的动断触点闭合,KM2线圈通电切除电阻R2,启动结束。
3制动控制进行制动时,将主令控制器SA的手柄扳回“0”位,KM,KM1,KM2线圈均断电,电动机切除交流电源。
同时,KT1,KT2线圈得电。
则有:(1)KM的动断触点闭合,KM3线圈通电,电动机接入直流电源进行能耗制动;同时,KM2线圈通电,电动机在转子短接全部电阻的情况下进行能耗制动。
(2)KM的动合辅助触点断开,KT线圈断电开始延时,当延时结束时,KT延时断开的动合触点断开,KM2,KM3线圈均断电,制动结束。
4调速控制过程当需要电动机在低速下运行时,可将主令控制器SA手柄推向“1”位或“2”位,则电动机的转子在串入一段电阻或不串入电阻的情况下以较高速度运转二任务要求绕线式转子异步电动机转子串电阻调速控制电路的PLC程序设计。
三相电机七种调速方式
三相电机七种调速方式一、变极对数调速方法这种调速方法是用改变定子绕组的接红方式来改变笼型电动机定子极对数达到调速目的,特点如下:具有较硬的机械特性,稳定性良好;无转差损耗,效率高;接线简单、控制方便、价格低;有级调速,级差较大,不能获得平滑调速;可以与调压调速、电磁转差离合器配合使用,获得较高效率的平滑调速特性。
本方法适用于不需要无级调速的生产机械,如金属切削机床、升降机、起重设备、风机、水泵等。
二、变频调速方法变频调速是改变电动机定子电源的频率,从而改变其同步转速的调速方法。
变频调速系统主要设备是提供变频电源的变频器,变频器可分成交流-直流-交流变频器和交流-交流变频器两大类,目前国内大都使用交-直-交变频器。
其特点:效率高,调速过程中没有附加损耗;应用范围广,可用于笼型异步电动机;调速范围大,特性硬,精度高;技术复杂,造价高,维护检修困难。
本方法适用于要求精度高、调速性能较好场合。
三、串级调速方法串级调速是指绕线式电动机转子回路中串入可调节的附加电势来改变电动机的转差,达到调速的目的。
大部分转差功率被串入的附加电势所吸收,再利用产生附加的装置,把吸收的转差功率返回电网或转换能量加以利用。
根据转差功率吸收利用方式,串级调速可分为电机串级调速、机械串级调速及晶闸管串级调速形式,多采用晶闸管串级调速,其特点为:可将调速过程中的转差损耗回馈到电网或生产机械上,效率较高;装置容量与调速范围成正比,投资省,适用于调速范围在额定转速70-90的生产机械上;调速装置故障时可以切换至全速运行,避免停产;晶闸管串级调速功率因数偏低,谐波影响较大。
本方法适合于风机、水泵及轧钢机、矿井提升机、挤压机上使用。
四、绕线式电动机转子串电阻调速方法绕线式异步电动机转子串入附加电阻,使电动机的转差率加大,电动机在较低的转速下运行。
串入的电阻越大,电动机的转速越低。
此方法设备简单,控制方便,但转差功率以发热的形式消耗在电阻上。
绕线式电动机转子串电阻调速方法

绕线式电动机转子串电阻调速方法绕线式异步电动机转子串入附加电阻,使电动机的转差率加大,电动机在较低的转速下运行;串入的电阻越大,电动机的转速越低;此方法设备简单,控制方便,但转差功率以发热的形式消耗在电阻上;属有级调速,机械特性较软;1、串电阻启动增加,降低,起动达速后切除启动电阻就是转子回路全速运行;2、串电阻启动电阻最大值起动,根据需要调整电阻的阻值,可以改变电机的运行速度,达到调速的目的是有范围的调速;绕线式电机的启动电流是可调的,通过调整转子串联的电阻大小,可以调节绕线式电机的启动电流原理:对于绕线式异步电动机,当电网电压及频率不变时,在转子回路中串入电阻后,可以改善电动机的起动转矩,在绕线电机转子中串接启动电阻,减小启动电流,电阻一般接为星形接法,根据公式:I0=U0/R0当转子串接电阻时R0↑,在U0不变的情况下,I0↓,此分析忽略电机感抗的损耗;启动前将电阻全部接入转子回路,随着启动过程的结束,启动电阻被逐级短接,KM1,KM2,KM3逐级吸合,保证始终有较大的起动转矩,短接方式可以遵循时间和电流调节原则,KA1,KA2,KA3中间继电器可以根据实际工作情况而定;RN=E N÷I N÷√3 R N:电机转子额定电阻E N:电机转子额定电压I N:电机转子额定电流例:240KW-6极电机,定子电流436A,定子电压380V;转子电流376A,转子电压407VRN=E N÷IN÷√3=407÷376÷√3=÷√3=Ω△RY1= RN =×=Ω△RY2= =×=Ω△R1= =×=Ω△R2= RN =×=Ω△R3= RN =×=Ω△R4= =×=Ω△R5= RN =×=Ω△R6= =×=Ω上为8级加速,总电阻值为电压/电流√3Ω另注:输出的转矩一定时,转子串电阻越大在一定范围内,速度越慢;没有具体的计算参数.。
第3章 第3节 绕线式异步电动机的调速
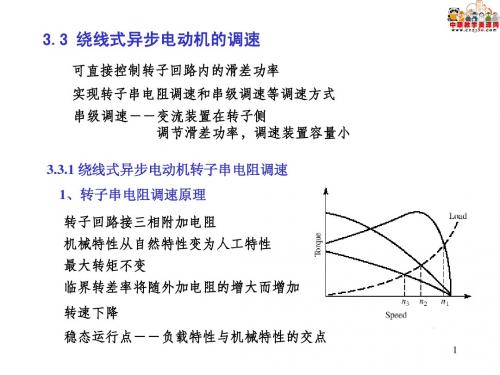
可直接控制转子回路内的滑差功率 实现转子串电阻调速和串级调速等调速方式 串级调速--变流装置在转子侧 调节滑差功率,调速装置容量小 3.3.1 绕线式异步电动机转子串电阻调速 1、转子串电阻调速原理 转子回路接三相附加电阻 机械特性从自然特性变为人工特性 最大转矩不变
临界转差率将随外加电阻的增大而增加
改变值,逆变器输出电压变化,实现调速
19
①第1工作区
( p 0
600 )
转子整流输出电压(考虑换流压降及电机转子侧电阻Rd):
U d 2.34sE 2 ( 3sX d
2 Rd ) I d
逆变电压:
U 2.34U 2T cos ( 3X T
2 RT )I d
1)亚同步系统--交直交 静止变流器作用: 回收利用转子绕组中的转差功 率--传递有功功率 二极管不可控整流桥把转差频率 的交流变成直流 有源逆变器把直流变成电网频 率的交流回馈电网 PCU—Power Converter Unit
2)超同步系统--交-交变流器
静止变流器能双向传递有功功率 既能运行于亚同步速度,又能运行 于超同步 同时相位能随意变化,传递无功 功率,改善功率因数
) cos1 (1
2X d Id 6 E2
)
Xd--转子不动时折算到转子侧的总漏抗 Id--负载电流即整流输出电流
E2--电机静止时转子绕组相电势
γ角与转差率s无关 随着负载电流Id的增加而增加
当 Id 6E2 4Xd 时
60
14
2、转子整流电路3种工作状态 ①第1工作状态 负载不很大,换流重叠角γ随负载上升而增大,变化范围:
忽略分母中 有
变转差率调速
三相异步电动机的变转差率S调速三相交流异步电动机的变转差率调速包括绕线转子异步电动机的转子串电阻调速、串级调速和三相交流异步电动机的定子调压调速等。
1.定子调压调速该调速方法主要用于笼型异步电动机。
由于最大转矩和启动转矩与电压的平方成正比,如当电压降到额定电压的50%时,最大转矩和启动转矩则降到了降压之前的25%。
所以这种调速方式的启动能力与带负载能力都是较低的,其调速的机械特性曲线如图2.90所示由以上调速机械特性曲线可知,随着加在定子绕组上电压的降低,最大转矩、启动转矩都会减小,电动机的带负载能力因此渐弱,所以调压调速适用于转矩随转速降低而减小的负载(如通风机负载)。
2.绕线转子异步电动机转子串电阻调速绕线转子异步电动机的转子回路串接对称电阻调速时的机械特性曲线,由机械特性曲线可知,当负载转矩一定时,转子串入附加电阻时,n、T不变,但s增大,机械特性曲线的斜率增大,工作点的转差率随着转子串接电阻阻值的增大而增大,电动机的转速随转子串接电阻值的增大而减小。
3.串级调速串级调速就是指在转子回路串接与转子电动势同频率的附加电动势,通过改变附加电动势的幅值或相位来实现调速的方式。
串级调速完全克服了转子串电阻调速的缺点,它具有高效率、无级平滑调速及低速时机械特性较硬等优点。
当调节串接在转子回路中附加电动势的幅值或相位时,转子回路的电流发生了变化,从而改变了电动机的电磁转矩,最终使电动机的转速发生变化。
因为输入功率P基本不变,当要降低转速时,则将较大的转差功率sP通过晶闸管逆变回送电网,使输出机械功率降低,从而使转速下降。
当要升高转速时,则将回送的转差功率Sp:减小,使输出机械功率变大,转速增加。
若通过转子变流器将电功率从转子输入,则可使转速超过同步速度,实现超同步调速。
绕线转子异步电动机双馈调速系统

此时功率变换单元CU得组成如图7-3a所示,其中 CU1就是整流器,CU2就是有源逆变器。对于工况4 和5,电动机转子要从电网吸收功率,必须用一台变 频器与转子相连,其结构如图7-3b,CU2工作在可控 整流状态,CU1工作在逆变状态。
Er sEr0
(7-1)
式中s ——异步电动机得转差率;
Er0 ——绕线型异步电动机转子开路相电动势, 也就就是转子开路额定相电压值。
7、1、1 绕线转子异步电动机 转子附加电动势得作用
图7-1 绕线型异步电动机转子附加电动势得原理图
转子相电流
在转子短路情况பைடு நூலகம்,转子相电流得表达式为
Ir
sEr0 Rr2 (sX r0 )2
绕线转子异步电动机双馈调速方法早在20世纪30年 代就已被提出,到了60~70年代,当可控电力电子器 件出现以后,才得到更好得应用。
7、1 绕线转子异步电动机双馈 调速工作原理
异步电动机由电网供电并以电动状态运行时,她 从电网输入(馈入)电功率,而在其轴上输出机械 功率给负载,以拖动负载运行。
大家应该也有点累了,稍作休息
大家有疑问的,可以询问和交
11
7、1、2 绕线转子异步电动 机双馈调速得五种工况
在绕线型异步电动机转子侧引入一个可控得附加 电动势并改变其幅值,就可以实现对电动机转速 得调节。
可控附加电动势得引入必然在转子侧形成功率得 传送,既可以把转子侧得转差功率传输到与之相 连得交流电源或外电路中去,也可以就是从外面 吸收功率到转子中来。
7、2、1串级调速系统得工作原 理
绕线式电动机转子串电阻调速方法

绕线式电动机转子串电阻调速方法2011-06-12 11:06:41| 分类:电子线路图|字号订阅三相异步电动机转速公式为:n=60f/p(1-s)从上式可见,改变供电频率f、电动机的极对数p及转差率s均可太到改变转速的目的。
从调速的本质来看,不同的调速方式无非是改变交流电动机的同步转速或不改变同步转两种。
在生产机械中广泛使用不改变同步转速的调速方法有绕线式电动机的转子串电阻调速、斩波调速、串级调速以及应用电磁转差离合器、液力偶合器、油膜离合器等调速。
改变同步转速的有改变定子极对数的多速电动机,改变定子电压、频率的变频调速有能无换向电动机调速等。
从调速时的能耗观点来看,有高效调速方法与低效调速方法两种:高效调速指时转差率不变,因此无转差损耗,如多速电动机、变频调速以及能将转差损耗回收的调速方法(如串级调速等)。
有转差损耗的调速方法属低效调速,如转子串电阻调速方法,能量就损耗在转子回路中;电磁离合器的调速方法,能量损耗在离合器线圈中;液力偶合器调速,能量损耗在液力偶合器的油中。
一般来说转差损耗随调速范围扩大而增加,如果调速范围不大,能量损耗是很小的。
一、变极对数调速方法这种调速方法是用改变定子绕组的接红方式来改变笼型电动机定子极对数达到调速目的,特点如下:具有较硬的机械特性,稳定性良好;无转差损耗,效率高;接线简单、控制方便、价格低;有级调速,级差较大,不能获得平滑调速;可以与调压调速、电磁转差离合器配合使用,获得较高效率的平滑调速特性。
本方法适用于不需要无级调速的生产机械,如金属切削机床、升降机、起重设备、风机、水泵等。
二、变频调速方法变频调速是改变电动机定子电源的频率,从而改变其同步转速的调速方法。
变频调速系统主要设备是提供变频电源的变频器,变频器可分成交流-直流-交流变频器和交流-交流变频器两大类,目前国内大都使用交-直-交变频器。
其特点:效率高,调速过程中没有附加损耗;应用范围广,可用于笼型异步电动机;调速范围大,特性硬,精度高;技术复杂,造价高,维护检修困难。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
绕线式电动机转子串电阻调速方法
绕线式异步电动机转子串入附加电阻,使电动机的转差率加大,电动机在较低的转速下运行。
串入的电阻越大,电动机的转速越低。
此方法设备简单,控制方便,但转差功率以发热的形式消耗在电阻上。
属有级调速,机械特性较软。
1、串电阻启动增加起动转矩,降低起动电流,起动达速后切除启动电阻(就是短接转子回路)全速运行。
2、串电阻启动(电阻最大值起动),根据需要调整电阻的阻值,可以改变电机的运行速度,达到调速的目的(是有范围的调速)。
绕线式电机的启动电流是可调的,通过调整转子串联的电阻大小,可以调节绕线式电机的启动电流!
原理:对于绕线式异步电动机,当电网电压及频率不变时,在转子回路中串入电阻后,可以改善电动机的起动转矩,在绕线电机转子中串接启动电阻,减小启动电流,电阻一般接为星形接法,根据公式:
I0=U0/R0
当转子串接电阻时R0↑,在U0不变的情况下,I0↓,此分析忽略电机感抗的损耗。
启动前将电阻全部接入转子回路,随着启动过程的结束,启动电阻被逐级短接,
KM1,KM2,KM3逐级吸合,保证始终有较大的起动转矩,短接方式可以遵循时间和电流调节原则,KA1,KA2,KA3中间继电器可以根据实际工作情况而定。
RN=E N÷I N÷√3 R N:电机转子额定电阻
E N:电机转子额定电压
I N:电机转子额定电流
例:240KW-6极电机,定子电流436A,定子电压380V。
转子电流376A,转子电压407V
RN=(E N÷IN)÷√3=(407÷376)÷√3=(1.0824)÷√3=0.624Ω△RY1=1.4 RN = 1.4×1.0824 = 1.515Ω
△RY2=0.5RN = 0.5×1.0824= 0.5412Ω
△R1=0.3RN = 0.3×1.0824 = 0.3247Ω
△R2=0.2 RN = 0.2×1.0824 = 0.21648Ω
△R3=0.12 RN = 0.12×1.0824= 0.1299Ω
△R4=0.07RN = 0.07×1.0824= 0.0757Ω
△R5=0.04 RN = 0.04×1.0824 = 0.04329Ω
△R6=0.02RN = 0.02×1.0824 = 0.021648Ω
上为8级加速,总电阻值为(电压/电流√3)0.624Ω
另注:输出的转矩一定时,转子串电阻越大(在一定范围内),速度越慢。
没有具体的计算参数.。