发电机励磁控制系统MATLAB仿真
基于matlab的同步发电机励磁系统仿真分析与调试毕业设计
基于MATLAB的同步发电机励磁系统仿真分析与调试摘要同步发电机为电力系统提供能量,其控制性能的好坏将直接决定电力系统的安全与稳定运行状况。
通过掌握利用MATLAB对励磁控制进行分析和研究的技能,能灵活应用MATLAB的SIMULINK仿真软件,分析系统的性能。
通过使用这一软件工具从繁琐枯燥的计算负担中解脱出来,而把更多的精力用到思考本质问题和研究解决实际生产问题上去。
文章介绍了MATLAB/Simulink的主要特点、基本模块和功能,分析了同步发电机励磁调节系统的组成及其各个部分原理,建立了基于MATLAB的同步发电机及其励磁调节系统仿真模型,最后建立了以PID和PSS为励磁控制方式的同步发电机励磁调节系统数学模型,在Simulink环境下进行了仿真,收到了很好的效果。
关键词:MATLAB;同步发电机;励磁调节系统;建模;仿真;校正ABSTRACTSynchronous generator is the energy of the power system provider, and its performance will directly determine the quality of power system security and stability in operation. Through mastering the use of MATLAB for analysis of the excitation control and research skills, flexibility SIMULINK of MATLAB simulation software to analyze performance of the system. Through the use of the software tools from the boring red tape out of the computational burden, and more reflection on the nature of the problem used to solve practical production and research issues.The article introduced the main features of the MATLAB/Simulink,the basic module and function,illustrated the composition of synchronous generator excitation system and its principle of every part,established the simulation model of generator from MATLAB and that of generator excitation system,established synchronous generator excitation system mathematical model that is controlled by the way of PID and PSS,simulate it in the environment of Simulink,get pretty good results.Key words: MATLAB;synchronous generator;excitation control system;modeling;simulation;Correction目录1 绪论 (1)1.1 引言 (1)1.2 MATLAB 软件介绍 (1)1.2.1 MATLAB 软件简介 (1)1.2.2 MATLAB 软件语言特点 (2)1.3 Simulink 介绍 (4)1.3.1 Simulink 简介 (4)1.3.2 Simulink 功能介绍 (4)1.3.3 Simulink 特点介绍 (5)2 同步发电机的励磁系统控制原理 (6)2.1 同步发电机介绍 (6)2.1.1 同步发电机工作原理 (6)2.2 励磁系统概述 (7)2.3 励磁系统的分类 (8)2.3.1 直流励磁机励磁系统 (8)2.3.2 半导体励磁系统 (9)2.3.3 静止励磁机励磁系统 (11)2.4 励磁系统在电力系统中的作用 (12)3 同步发电机励磁系统MATLAB 的建模 (15)3.1 励磁控制系统数学模型[3] (15)3.2 励磁控制系统的传递函数[3] (16)4 励磁控制系统的MATLAB 仿真 (17)4.1 励磁系统的仿真 (17)4.1.1 闭环传递函数 (17)4.1.1.1 闭环传递函数模型 (17)4.1.1.2 求阶跃响应 (18)4.1.2 开环传递函数 (18)4.1.2.1 开环传递函数模型 (18)4.1.2.2 根轨迹图设计器 (19)4.2 Simulink 求阶跃响应 (21)4.2.1 阶跃响应的暂态指标 (22)5 励磁控制系统的校正 (23)5.1 校正的概念 (23)5.2 校正的分类 (23)5.3 PID 对励磁系统的仿真 (23)5.4 励磁系统稳定器(PSS)对系统的校正 (25)5.5 PID 校正和PSS 校正的分析比较 (27)6 总结 (28)参考文献 (29)致谢 (30)附录 (31)附录A 计算暂态指标的程序1 (31)附录B 计算暂态指标的程序2 (33)1 绪论1.1 引言同步发电机是电力系统的能量提供者, 供给同步发电机励磁电流的电源及其附属设备统称为励磁系统。
MATLABSIMULINK永磁同步电机矢量控制系统仿真
MATLABSIMULINK永磁同步电机矢量控制系统仿真一、本文概述随着电机控制技术的快速发展,永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)在工业、交通和能源等领域的应用越来越广泛。
矢量控制作为PMSM的一种高效控制策略,能够实现对电机转矩和磁链的精确控制,从而提高电机的动态性能和稳态性能。
然而,在实际应用中,矢量控制系统的设计和调试过程往往复杂且耗时。
因此,利用MATLAB/Simulink进行永磁同步电机矢量控制系统的仿真研究,对于深入理解矢量控制原理、优化控制策略以及提高系统性能具有重要意义。
本文旨在通过MATLAB/Simulink平台,建立永磁同步电机矢量控制系统的仿真模型,并对其进行仿真分析。
本文将对永磁同步电机的基本结构和数学模型进行介绍,为后续仿真模型的建立提供理论基础。
本文将详细阐述矢量控制策略的基本原理和实现方法,包括坐标变换、空间矢量脉宽调制(SVPWM)等关键技术。
在此基础上,本文将利用MATLAB/Simulink中的电机控制库和自定义模块,搭建永磁同步电机矢量控制系统的仿真模型,并对其进行仿真实验。
本文将根据仿真结果,对矢量控制系统的性能进行分析和评价,并提出优化建议。
通过本文的研究,读者可以全面了解永磁同步电机矢量控制系统的基本原理和仿真实现方法,为后续的实际应用提供有益的参考和指导。
本文的研究结果也为永磁同步电机控制技术的发展和应用提供了有益的探索和启示。
二、永磁同步电机数学模型永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)是一种高性能的电机,广泛应用于各种工业领域。
为了有效地对其进行控制,我们需要建立其精确的数学模型。
PMSM的数学模型主要包括电气方程、机械方程和磁链方程。
PMSM的电气方程描述了电机的电压、电流和磁链之间的关系。
在dq旋转坐标系下,电气方程可以表示为:V_d &= R_i I_d + \frac{d\Phi_d}{dt} - \omega_e \Phi_q \ V_q &= R_i I_q + \frac{d\Phi_q}{dt} + \omega_e \Phi_d其中,(V_d) 和 (V_q) 分别是d轴和q轴的电压;(I_d) 和 (I_q) 分别是d轴和q轴的电流;(\Phi_d) 和 (\Phi_q) 分别是d轴和q轴的磁链;(R_i) 是定子电阻;(\omega_e) 是电角速度。
基于MATLAB的同步发电机励磁系统仿真研究
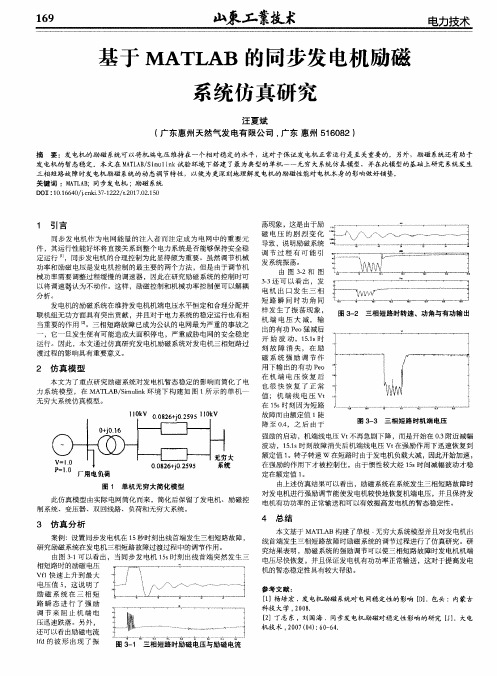
案例 :设置同步发 电机在 1 5 秒时刻 出线首端发生三相短路故 障, 研究励磁 系统在 发电机 三相短路故障过渡过程中的调节作用 。 由图 3 - 1 可 以看出 ,当同步发 电机 1 5 s 时刻出线 首端突然 发生三 相短路时 的励磁 电压 Vf l快速 上升 到最大 电压 值 5 ,这 说 明 了 励 磁 系 统 在 三 相 短 路 瞬 态 进 行 了 强 励 调 节 来 阻 止 机 端 电 压迅速跌落 。另外 , 还可以看出励磁 电流 l f d的波 形 出现 了 振
D OI: 1 0 . 1 6 6 4 0 / } . c n k i . 3 7 — 1 2 2 2 / t . 2 0 1 7 . 0 2 . 1 5 0
1 引 言
同步发 电机作 为 电网能 最的注 入者而 注定 成为 电网 中的重要 元 件 ,其运行性 能好坏将直接关 系到整 个电力系统是否能够保持 安全稳 定运行 ” ,同步发 电机的合理 控制为此显得 颇为重要 。虽然调 节机械 功率和励磁 电压 是发 电机控制 的最主 要的两个方法 ,但是 由 于 调节机 械功率需要 调整过程缓慢 的调速器 ,因此在研究励磁系统 的控 制时可 一 Nhomakorabea,
2 仿真模型
一
本文为 了重点研究励磁 系统对发 电机暂态稳定 的影 响而简化 了电 力系 统模 型 ,在 MA TL AB / S i mt d i n k环 境下 构建如 图 1所示 的单 机一 无穷大系统仿真模型 。
一 ~
荡现象 ,这是 由于励 磁 电压 的剧 烈 变 化 导致 ,说明励磁系统 调 节 过 程 有 可 能 引 : F = = = = =■—— 二 =: = = = = = == = = ] 发系统振荡 。 l n ^ n ^ j 1 ~ , 一 — _ v …… — — 一 一 — 一 _ _ 由图3 — 2和 图 t 3 — 3 还 可 以看 出,发 电机 出 口 发 生 三 相 短 路 瞬 间 时 功 角 同 样 发生 了振 荡现 象 , 图3 — 2 三相短路时转速、功角与有功输出 机 端 电 压 大 减 ,输 出的有功 P e o 猛减后 开 始 波 动 ,1 5 . 1 s 时 刻 故 障 消 失 ,在 励 磁 系 统 强 励 调 节 作 用 下输 出的有功 P e o 在 机 端 电 压 恢 复 后 也 很 快 恢 复 了 正 常 值 ; 机 端 线 电压 Vt 在 1 5 s 时刻 因为短路 故 障而 由额定值 1 陡 图3 — 3 三 相 短 路 时 机 端 电 压 降至 O . 4 ,之 后 由 于 强励 的启动 ,机端线 电压 V t 不再急剧下降 ,而是开始在 0 . 3附近减 幅 波动 ,1 5 . 1 s 时刻故 障消 失后机端线 电压 Vt 在 强励作用下 迅速恢复 到 额定值 1 。 转子转速 w 在短路时 由于发电机负载 大减 , 因此开 始加速 , 在 强励的作用下 才被控制住 ,由于惯 性较大经 1 5 s 时间减幅波动才 稳 定在额定值 1 。
基于MATLAB的同步发电机励磁系统的建模与仿真研究剖析
硕士研究生学位论文X X大学论文题目(中文):基于MATLAB的同步发电机励磁系统的建模仿真论文题目(外文):Modeling and Simulation of excitation system of synchronous generator based on MATLAB/simulink 研究生姓名:XXXX学科、专业:电气工程研究方向:导师姓名职称:论文答辩日期年月日学位授予日期年月日摘要近些年来,电力系统发展迅速,基本形成了高电压、大机组、超远距离输送的模式。
因此,保证电力系统的安全、稳定、高效运行成为了研究的热点与难点。
同步发电机励磁控制系统是同步发电机控制系统的核心。
经过长年的研究证明, 实现对同步发电机励磁的合理有效控制,是实现电力系统稳定运行要求的最快捷、最有效、最廉价的方法。
传统PID控制需要线性的精确模型,无法实现对非线性对象的有效控制,不能及时应对系统运行中被控对象发生的改变,对于目前以至未来电力系统的发展特点,难以实现有效控制。
模糊控制是一种智能控制方法,它不需要精确的数学模型,鲁棒性强,同时设计简单方便,易于实现。
本文从同步发电机励磁控制系统原理入手,在深入学习PID控制与模糊控制理论之后,将两者结合起来,提出了基于模糊PID同步发电机励磁控制策略。
详细阐述了该模糊PID励磁控制器的设计过程,实现了针对同步发电机励磁控制这一非线性系统的实时在线控制。
选取了多组参数对所设计的励磁控制器进行仿真,与常规PID控制效果进行比较分析。
实验结果表明本文提出的基于模糊PID的同步发电机励磁控制效果良好,系统的动态特性和静态特性相对于传统PID励磁控制都得到改善,能够对系统运行状态的改变做出及时合理的调整,响应速度快,超调量小,调整时间短,使系统具有较强的适应和抗干扰能力,控制效果明显提高;对于传统PID控制无法解决的非线性问题,模糊PID控制依然有良好的控制效果,体现出解决非线性控制问题的优势。
励磁系统可控整流逆变电路的MATLAB建模仿真教学

励磁系统可控整流逆变电路的MATLAB建模仿真教学作者:刘桂英粟时平来源:《电子世界》2013年第09期【摘要】三相可控整流逆变电路具有很强实用性,而基本的整流逆变电路随着负载和移相角的不同其元件器上所承受的电压电流以及负载电压电流的波形变化很大,给教学带来不便,给学带来了一定的难度。
在对励磁系统中三相可控整流逆变电路的教学过程,利用MATLAB/Simulink仿真软件的特点和强大仿真功能,以课程中的难点和实际中最常用的三相可控整流逆变电路为例进行仿真建模分析。
教学实践表明,采用这种教学方法不仅可以帮助学生理解课中的难点,使课程中许多抽象的概念形象化,而且提高了学生的学习兴趣、分析和解决实际问题的能力,提高了教学效果和质量。
【关键词】三相可控;整流;逆变;MATLAB;建模仿真1.前言《电力系统自动控制技术》是电气工程学科中一个最为活跃的分支,其不断进步给电气工程的现代化以巨大的推动力,从而使控制理论广泛用于发电机励磁系统和调频系统,使电力电子装置和系统的性能满足各种需求;实现了“弱电控制强电”的技术。
根据教学大纲的安排,我院电气工程及其自动化专业的学生是在大三的第二学期开设《电力系统自动控制技术》这门课,这门课的第三章第三节主要讲述励磁系统中的整流电路,而且都是感性负载的三相桥式半控或全控整流(逆变)电路。
而我院电气工程及其自动化专业的学生在前续的《模拟电子技术》课程中没有学过三相整流和晶闸管元件整流,而《电力电子技术》是安排在大四的第一学期开设,因此学生在学习励磁系统中的整流电路这节内容时,对书中的整流逆变输出波形分析感觉很难掌握,要想使学生比较容易学懂就得要花较多的学时,而教学大纲又不能给予较多的学时。
为了帮助学生学习这部分内容,除了对教材的内容进行调整、采用多媒体和传统的教学方法与手段相结合之外,还利用他们学过的MATLAB仿真软件对这部分内容进行仿真建模实践。
本文利用MATLAB中Simulink对励磁系统中的三相桥式可控整流逆变进行建模仿真实践,这样可以大大的提高课堂教学质量,激发了学生的学习兴趣,达到了理想的教学效果和质量。
基于MATLAB的励磁控制系统仿真分析

基于MATLAB的励磁控制系统仿真分析摘要:近些年来,电力系统发展迅速,基本形成了高电压、大机组、超远距离输送的模式。
因此,保证电力系统的安全、稳定、高效运行成为了研究的热点与难点。
同步发电机励磁控制系统是同步发电机控制系统的核心。
经过长年的研究证明,实现对同步发电机励磁的合理有效控制,是实现电力系统稳定运行要求的最快捷、最有效、最廉价的方法。
同步发电机的励磁系统一般由励磁功率单元和励磁调节器两个部分组成。
本文从同步发电机励磁控制系统原理入手,在深入学习PID控制与模糊控制理论之后,将两者结合起来,提出了基于模糊PID同步发电机励磁控制策略,并对其进行了基于MATLAB的励磁控制系统仿真分析。
关键字:同步发电机;励磁控制系统;MATLAB建模;PID控制;模糊控制1发电机励磁系统的作用维持发电机或其他控制点(例如发电厂高压侧母线)的电压在给定水平维持电压水平是励磁控制系统的主要的任务,有以下 3 个主要原因:第一,保证电力系统运行设备的安全。
电力系统中的运行设备都有其额定运行电压和高运行电压。
保持发电机端电压在容许水平上,是保证发电机及电力系统设备安全运行的基本条件之一,这就要求发电机励磁系统不但能够在静态下,而且能在大扰动后的稳态下保证发电机电压在给定的容许水平上。
发电机运行规程规定,大型同步发电机运行电压不得高于额定值的 110%。
第二,保证发电机运行的经济性。
发电机在额定值附近运行是经济的。
如果发电机电压下降,则输出相同的功率所需的定子电流将增加,从而使损耗增加。
规程规定大型发电机运行电压不得低于额定值的 90%;当发电机电压低于 95%时,发电机应限负荷运行。
其他电力设备也有此问题。
第三,提高维持发电机电压能力的要求和提高电力系统稳定的要求在许多方面是一致的。
励磁控制系统对静态稳定、动态稳定和暂态稳定的改善,都有显著的作用,而且是为简单、经济而有效的措施。
2同步发电机励磁系统建模2.1 发电机模型和励磁系统同步发电机是电力系统中物理过程最复杂的的元件,既有机械运动过程又有电磁暂态过程,并且包含变量众多。
发电机励磁控制系统MATLAB仿真
上海电力学院《自动控制原理》MATLAB仿真实验报告课程:自动控制原理题目:发电机励磁控制系统院系:电气工程学院班级:2010021姓名:学号:20102168发电机励磁控制系统(PID 、超前、滞后控制)仿真一、仿真模型图1发电机励磁控制系统模型如图所示为发电机励磁控制系统模型。
功率励磁装置的传递函数为11f T S+,发电机的等效传递函数为11d T S'+,10.05T s =,0.5f T s =,5d T s '=,20K =,分别用不同的控制器(PID ,超前,滞后)使系统相位域量50γ≥,误差系数大于40。
,在实验过程中比较不同控制器的特点。
二、系统控制器 (1) PID 控制器PID 控制器有三个可以调整的参数,即p K 、i T 和d T ,11c p d i G K T s T s⎛⎫=++ ⎪⎝⎭这种控制器既有比例作用的及时迅速,又有积分作用的消除余差能力,还有微分作用的超前控制功能。
当偏差阶跃出现时,微分立即大幅度动作,抑制偏差的这种跃变;比例也同时起消除偏差的作用,使偏差幅度减小,由于比例作用是持久和起主要作用的控制规律,因此可使系统比较稳定;而积分作用慢慢把余差克服掉。
只要三个作用的控制参数选择得当,便可充分发挥三种控制规律的优点,得到较为理想的控制效果。
PID 控制器特别适用于过程的动态特性是线性的而且控制性能要求不太高的场合。
(2) 超前校正控制器超前校正装置的主要作用是通过其相位超前效应来改变频率响应曲线的形状,产生足够大的相位超前角,以补偿原来系统中元件造成的过大的相位滞后。
利用其相位超前特性,可以增大系统的稳定裕度,提高动态响应的平稳性和快速性;对提高系统稳态精度作用不大,系统抗干扰能力有所下降(一般用于稳态精度已基本满足要求,但动态性能差的系统);利用校正函数()11c p TSG s K TSα+=+,()1α>求得参数进行校正。
发电机励磁控制系统MATLAB仿真 (2)

一)问题描述如图所示,是发电机励磁控制系统。
选择不同的控制器(PID、超前、滞后)使系统γ≥50º,误差系数大于40。
在实验过程中比较不同控制器的特点。
二)理论方法与实验技术PID控制器是在工业过程控制中最常见的一种控制装置。
PID的基本控制作用有:比例作用提供基本的反馈控制;积分控制作用用于消除稳态误差;微分作用可预测将来的误差变化以减小动态偏差。
PID控制器特别适用于过程的动态特性是线性的而且控制性能要求不太高的场合。
超前校正装置的主要作用是通过其相位超前效应来改变频率响应曲线的形状,产生足够大的相位超前角,以补偿原来系统中元件造成的过大的相位滞后。
滞后校正装置将给系统带来滞后的相角。
引入滞后校正装置的真正目的不是为了提供一个滞后相角,而是要使系统增益适当衰减,以便提高系统的稳态精度。
三)实验设计与实现实验步骤参见书《自动控制原理——实验与实践篇》(杨平编)书P93-P94,P125-129。
四)实验结果与分析1.无控制器时,系统的伯德图和单位阶跃响应。
由伯德图中可以读出系统的相位裕量为36.4º。
从响应中可以看出,系统的稳态误差较大。
2.使用PID控制器对系统进行控制。
在反复调节分析后,选择较好的数据为最终调节数据:Kp=2.1,Ti=0.63s,Td=0.26s;其对应的伯德图和响应图如下图。
从伯德图中可以读出系统的相位裕量为51.7º,系统的稳定误差为零。
3.使用超前环节进行控制根据题目所给Kv>40的要求取Kv=45,求得超前环节的增益K=2.25。
在反复调节分析后,得出较好超前环节的传递函数为:ssG 056.014024.0125.2)s (++⨯=超前环节增大了系统的稳定裕量,减小了稳定误差。
4.使用滞后环节进行控制ssG 56.191652.3125.2)s (++⨯=滞后环节增大了系统的稳定裕量,减小了稳定误差,但是上升时间也增大了。
五)结论与讨论PID、超前、滞后,都能增加系统的稳定裕量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
上海电力学院《自动控制原理》MATLAB仿真实验报告课程:自动控制原理题目:发电机励磁控制系统院系:电气工程学院班级:2010021姓名:学号:20102168发电机励磁控制系统(PID 、超前、滞后控制)仿真一、仿真模型图1发电机励磁控制系统模型如图所示为发电机励磁控制系统模型。
功率励磁装置的传递函数为11f T S+,发电机的等效传递函数为11d T S'+,10.05T s =,0.5f T s =,5d T s '=,20K =,分别用不同的控制器(PID ,超前,滞后)使系统相位域量50γ≥,误差系数大于40。
,在实验过程中比较不同控制器的特点。
二、系统控制器 (1) PID 控制器PID 控制器有三个可以调整的参数,即p K 、i T 和d T ,11c p d i G K T s T s⎛⎫=++ ⎪⎝⎭这种控制器既有比例作用的及时迅速,又有积分作用的消除余差能力,还有微分作用的超前控制功能。
当偏差阶跃出现时,微分立即大幅度动作,抑制偏差的这种跃变;比例也同时起消除偏差的作用,使偏差幅度减小,由于比例作用是持久和起主要作用的控制规律,因此可使系统比较稳定;而积分作用慢慢把余差克服掉。
只要三个作用的控制参数选择得当,便可充分发挥三种控制规律的优点,得到较为理想的控制效果。
PID 控制器特别适用于过程的动态特性是线性的而且控制性能要求不太高的场合。
(2) 超前校正控制器超前校正装置的主要作用是通过其相位超前效应来改变频率响应曲线的形状,产生足够大的相位超前角,以补偿原来系统中元件造成的过大的相位滞后。
利用其相位超前特性,可以增大系统的稳定裕度,提高动态响应的平稳性和快速性;对提高系统稳态精度作用不大,系统抗干扰能力有所下降(一般用于稳态精度已基本满足要求,但动态性能差的系统);利用校正函数()11c p TSG s K TSα+=+,()1α>求得参数进行校正。
(3) 滞后校正控制器滞后校正装置将给系统带来滞后的相角。
引入滞后校正装置的真正目的不是为了提供一个滞后相角,而是要使系统增益适当衰减,以便提高系统的稳态精度。
1)对系统响应速度要求不高而抑制噪声电平性能要求较高的场合;2)若待校正系统已具备满意的动态特性,而稳态性能不满足指标要求,也可采用串联滞后校正来提高稳态精度,同时保持其动态特性基本不变。
利用校正函数()11c pTSG s K TSα+=+,()1α>进行校正。
三、实验步骤与分析计算如下图2所示,发电机励磁控制系统模型在未加入任何控制的模型。
图2控制系统在未加入控制器时的模Step ResponseTim e (sec)A m p l i t u d e0.20.40.60.811.21.4图3未加控制器时阶跃输入响应曲线图4控制系统bode图由bode图上可以读出,其相位裕量为:-144°+180°=36°,幅值裕量为:15.7dB 与系统γ≥50º,误差系数大于40dB的要求有较大的差距。
同时可以得到控制系统的根轨迹图和开环响应曲线图。
1)PID控制器对系统进行控制使积分环节和微分环节模块不发生作用,单独调整比例参数,逐渐增大,大约在K=3.6的时候,出现了4:1的衰减比,如图3所示。
图5 PID控制阶跃输入响应曲线(3) 测取和换算相关数据有:13.60.2778δ==, 1.1786k T =。
根据经验公式表换算PID 参数: 4.5p K =,0.3536i T =,0.1179d T =。
此时()112.734.510.1179 4.50.530.3536c G s s s s s ⎛⎫=++=++ ⎪⎝⎭因此4.5,12.73,0.53p i d K K K ===。
Bode 图如图5所示图5由图5可知,相位域量32.9γ= ,不满足要求,调整i K 、d K ,当10i K =,0.7d K =时,Bode 图如图6所示,此时相位域量52.1γ= ,误差系数大于40,满足要求。
图6图73)使用超前环节进行控制 设Kp=)15)(15.0(50)(0++=s s s G , Bode 图如图9所示。
由图可知,校正前系统相位域量o 9.27=γ,控制器选用超前环节()11c pTSG s K TSα+=+,()1α>。
Step ResponseTime (sec)A m p l i t u d e00.20.40.60.81 1.2 1.4 1.6 1.820.20.40.60.811.21.4图8超前环节控制阶跃输入响应曲线-6-4-2M a g n i t u d e (d B )10-210-110101102P h a s e (d e g )Bode DiagramGm = Inf dB (at Inf rad/sec) , P m = 27.9 deg (at 4.25 rad/sec)Frequency (rad/sec)图9o m 1.2979.27-50-0o o 0=+=∆+=γγγϕ要89.2sin -1sin 1=+=mmϕϕα距横轴61.4lg 20-=-α 4.36-=-处的原()L ω线上做垂线与横轴的交点为m ω。
由图7可知,sec /6rad m =ω 5.3/sec m rad ω=。
098.089.2611=∙==αωm Tsss G c 098.01283.0150)(++∙=)51)(5.01)(098.01(283.0150)()(0s s s ss G s G G C s ++++∙==超前校正后的Bode 图如图10所示:由图10可知,相位域量o 9.50=γ,误差系数50=P K ,满足条件。
-80-60-40-2002040M a g n i t u d e (d B )10-210-110101102103P h a s e (d e g )Bode DiagramGm = Inf dB (at Inf rad/sec) , P m = 50.9 deg (at 5.54 rad/sec)Frequency (rad/sec)图104) 使用滞后环节进行控制设50=P K校正前系统相位域量o 9.27=γ,控制器选用滞后环节()11c pTSG s K TSα+=+,()1α>。
18010=-1805010=-120γ-++++ 要,在相频曲线上找出120- 出的频率1.55/sec c rad ω'=。
1110.155/sec 10c rad T ωω'=== 6.45T s =系统在c ω'处降至0B 所需的衰减幅值为13dB ,即20log 13α=, 4.47α=。
所以ssTs Ts K s G PC 81.28145.615011)(++∙=++=α校正后系统的开环传递函数为:)51)(5.01)(81.281()45.61(50)()()(0s s s s s G s G s G C ++++==。
M a g n i t u d e (d B )10-310-210-110101102P h a s e (d e g )Bode DiagramGm = Inf dB (at Inf rad/sec) , P m = 52.3 deg (at 1.7 rad/sec)Frequency (rad/sec)图11由图11可知,相位域量o 3.52=γ,误差系数50=P K ,满足条件。
0246810121416180.20.40.60.811.21.4Step ResponseTime (sec)A m p l i t u d e图12四、实验结果分析通过对响应曲线及其伯德图,PID 控制、超前控制、滞后控制的Kp 和相位裕量均能满足要求,存在不同的是其响应曲线,就稳态误差而言超前环节和滞后环节要优于PID 控制器;就响应速度而言,PID控制器和超前环节控制的响应速度要快于滞后环节,综上所述,该控制选用超前环节控制较好。
附录:1、部分作图程序 >> s=tf('s');>> sys=20/(1+0.05*s)/(1+0.5*s)/(1+5*s); >> margin(sys) >> rlocus(sys) >> s=tf('s');>> sys=(4.5+0.53*s+12.73/s)/(1+0.5*s)/(1+5*s); >> margin(sys)>> sys=50*(1+0.283*s)/((1+0.5*s)*(1+5*s)*(1+0.098*s)+50*(1+0.283*s)); >>sys1=50*(1+0.283*s)/((1+0.5*s)*(1+5*s)*(1+0.098*s)+50*(1+0.283*s)); >> step(sys1)>> sys2=50*(1+6.45*s)/((1+0.5*s)*(1+5*s)*(1+28.81*s)+50*(1+6.45*s)); >> step(sys2)。