多学科领域建模仿真平台SimulationX
SimulationX与AEMsim
分析的图形
台上实现了多学科领域的系统工程
的建模和仿真:机械,液压,热等物理领域。不同领域的模块之间可以直接进行物理连接。
TypeDesigner:基于最先进的多物理领仿真语言Modelica,最灵活建模工具,可以在用户指南的帮助
下轻松编写自已的算法或数学方程组。更多,更灵活,独特的参数概念、输入和变量。
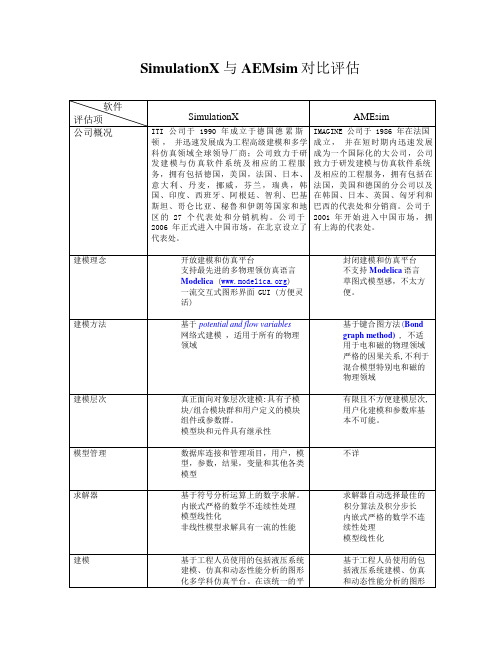
SimulationX与AEMsim对比评估
软件
评估项
SimulationX
AMEsim
公司概况
ITI公司于1990年成立于德国德累斯
顿,并迅速发展成为工程高级建模和多学科仿真领域全球领导厂商;公司致力于研发建模与仿真软件系统及相应的工程服
务,拥有包括德国,美国,法国、日本、意大利、丹麦,挪威,芬兰,瑞典,韩国、印度、西班牙、阿根廷、智利、巴基斯坦、哥仑比亚、秘鲁和伊朗等国家和地区的27个代表处和分销机构。公司于
2006年正式进入中国市场,在北京设立了代表处。
IMAGINE公司于1986年在法国
成立,并在短时期内迅速发展成为一个国际化的大公司,公司致力于研发建模与仿真软件系统
及相应的工程服务,拥有包括在法国,美国和德国的分公司以及在韩国、日本、英国、匈牙利和巴西的代表处和分销商。公司于
各类液压相关仿真软件汇总贴

各类液压相关仿真软件汇总贴以下软件排名不分先后:AMESim:(Advanced Modeling Environment for performing Simulation of engineering systems)为多学科领域复杂系统建模仿真平台。
用户可以在这个单一平台上建立复杂的多学科领域的系统模型,并在此基础上进行仿真计算和深入分析,也可以在这个平台上研究任何元件或系统的稳态和动态性能。
例如在燃油喷射、制动系统、动力传动、液压系统、机电系统和冷却系统中的应用。
面向工程应用的定位使得AMESim成为在汽车、液压和航天航空工业研发部门的理想选择。
工程设计师完全可以应用集成的一整套AMESim应用库来设计一个系统,所有的这些来自不同物理领域的模型都是经过严格的测试和实验验证的。
easy5:MSC Easy5是一套面向控制系统和多学科动态系统的仿真软件,用于在产品的概念和系统级设计阶段快速地建立完整、可靠的功能虚拟样机。
SimulationX:SimulationX 是一款分析评价技术系统内各部件相互作用的权威软件,是多学科领域建模、仿真和分析的通用CAE工具,并具有强大标准元件库,这些元件库包括:1D力学、3D多体系统、动力传动系统、液力学、气动力学、热力学、电子学、电驱动、磁学和控制。
另外,SimulationX还具有强大的后处理系统。
Automation Studio:加拿大Famic公司产品,推荐作为电液仿真及设计软件:经过与加拿大Famic中国代表王经理交流,终于知道原来很多液压软件都出自AS,I-Design,CHoose,MCDQuote,Easyvalve等都是AS的底层设计,终于找到液压仿真的源头了。
以上几个软件分别是Hyperforce,Rexroth,Eaton,Comatrol等公司产品,都是委托Famic 开发液压泵站、阀块及原理设计平台。
Hopson:瑞典从1977年开始研制,历时8 a推出了Hopsan液压系统仿真软件。
SimulationX仿真应用案例基于位置控制的六足平台

SimulationX仿真应用案例基于位置控制的六足平台newmaker介绍并联运动的研究在学术和工程上的都是一个热点,一个著名的应用实例就是所谓的六足平台,也称之为Stuart 平台。
安装在这个平台上设备可以快速地、精确地在三个直角坐标轴的六个自由度上定位,典型的实际应用有飞行模拟器、天文望远镜的高精度定位设备和并联机床。
对六足平台进行性能仿真至少需要完成多体运动结构的建模和相应的控制系统的建模,如要模拟得更细,就要在相应的物理领域(比如液压,多体领域)对执行器进行高保真度的建模和仿真。
在本应用案例概述中,可以看到SimulationX能够直观方便地解决建模和仿真问题,建模工作可以在不到一天的时间内完成,其中大量的时间是用来检查其力学结构和调整整个系统。
系统结构及建模一个典型六足平台结构如图1 所示,根据平台位置预设值计算出六足的长度预设值,然后驱动六个基于长度控制的执行器(根据实际应用可能是液压缸或直线电机等)。
在这个建模例子中,执行器假设为一个带有控制平台位置的控制反馈回路的力驱动元件(类似液压缸)。
图1:六足平台机械模型六足平台的机械部分是由SimulationX的3D 力学库的元件组成,如1D/3D 转换接口元件(形如液压缸),球体和一个通过SimulationX的外部CAD模型输入接口输入的复杂Cessna 飞机3D 模型。
该接口可以自动计算飞机模型的质心和惯性张量,1D/3D 转换接口元件的1D 边连接从控制器来的控制力。
预调和坐标变换为了控制平台的运动,规定了平台每个自由度上的位置信号,这些信号需转换成六个执行器的长度信号,通过矢量和矩阵操作可以很好地描述转换算法。
因为SimulationX提供了自己的编程语言——ITI-MDL,一种基于Modelica的建模语言,在信号处理模块中的信号可以是矢量形式,因此,使用imulationX可以很方便的完成上述任务,进行易于理解的建模设计,如图2 所示。
simulationx系统在网络通讯设计中的应用分析
S l in i a o x系统在网络通讯设计中的应用分析 mu t
● 赵 锐 邹华林 重庆大学软件学 院
[ 要] 摘 仿真软件的发展与仿真应用、算法、计算机和建模等技 术的发展相辅相成。其 目标是不断改善面向问题 、面向用
户的模 块描 述 能 力和对模 型 实验 的功 能 。S Iin 是 个 多 学科 仿 真软 件 , 包括 信 号 、机 械 、液 压 、气动 、 电 、等 学科 ,本 文就 i ao x mu t Sm lil 在不 同网络 通讯 方 面的仿 真进 行 了探 索 和分析 。 i uao x t1 [ 关键 词 ] i lin 仿真 S muaoX t 机械
瑞 艘 遗 的赶 据
电 4 蔓 解 i 女 礴 舞 堑
主要 特 点有 :① 保 留 了3 个层 次 的 建模 方式 :数 学方 程级 、方 实 现 服 务 器 块 图级 、基 本 元 素和 元 件级 ;模 块 名 称参 数和 变 量 清 晰 ,不 同 的 和 客户 端( 服 用 户可 以根 据 自 己 的特 点和 专 长 选 择 适合 自 己的 建模 方式 或 多 种 务 器 端 和 客
电 和磁 等 物理 领 域 。不 同领 域 模 块 之 间直 观 的 物 理 连 接方 式 使 得 程 如图 2 示。 所 ’ 发 送方 引起 的粘 包 是 由T 协议 本 身造 成 的 ,T 为提 高 传输 CP CP ④ 模 型 、程 序 、数据 、图形 的存储 和检 索 。可 以通过 对 软件 的 效 率 ,发送 方往 往要 收集 到足 够 多的数 据后 才发 送一 包数 据 ,若连 设 计来 实现 这些 功能 。仿 真软 件分 为仿 真语 言 、仿真 程序 包 和仿真 续 几次 发送 的数 据都 很 少 ,通 常T P 根 据优 化算 法把 这 些数据 合 C会 软 件 系统三 类 。其 中仿真 语言 是应 用最 广泛 的仿 真软 件 。仿 真程序 成 一包后 一次 发送 出去 ,这样 接收 方就 收到 了粘包 数 据。 包 是针 对仿 真 的专 门应用 领域 建立 起来 的程 序 系统 。软件 设认 人 员 接收 方 引起 的粘包 是 由于 接收 方用户 进程 不及 时 接收 数据 ,从 将 常用 的 程序 段 设 计成 通 用 的 子 程序 模 块 ,并 设 计一 个 主 程序 模 而 导致粘 包 ,这是 因为接 收方 先把 收到 的数据 放在 套 接宇 内部 接收 块 ,用 于调 用子 程序模 块 。仿 真研 究人 员使 用这 种程 序包 可免 去繁 缓 ;区 ,用户 进程 再从 该缓 ; 区取 出数据 ,若 下一 包数 据 到达 时前 中 中 重 的程序 编制 工作 。 包数据 尚未 被用 户进 程取 走 ,则 下一 包数据 就会 放到 该缓 冲 区中 前一 包数 据之 末 。而 用户进 程根 据预 先设 定 的缓冲 区大 小从 接收 缓 二 、Smu t n 系统 的 发展 优 势 i li X ao Smuain 仿 真 模型 的扩 充 或 改 变 都 可 通过 图形 用 户 界 面 f 冲 区取 数 据 ,这样 就一 次取 到 了多包 数据 。数 据 接收线 程 和数据 解 i lt X o GU ) 行 ,无需 编 写任何 程 序代 码 。Smu t n 为用户 提供 了 I 来进 i li X ao 读线 程分 离设 计方 法可 以解 决粘 包 问题 ,数据 接收 线程 完成 数据 的 个标准 化 、规 范化 和图形 化 的二次 开发 平 台 :用户 不仅 可 以直 接 接收 和 数据 预处 理 ( 粘 连 的数 据包 解 开) 将 ,数据 解读 线程 负责处 理 对Smuain 所有 模型 进行 修 改 , 还 可 以基于 Mo eia 言创 建 数据包 。 i l oX t dl 语 c 新 的模型 ,并能 够把 用户 自 己的C 码模 型 集成到 Smuain 软 件 代 i l oX t 包 中。Smuain 基 于 对基 本元 素 进行 组合 的 建模 理念 , 即把 物 i l oX t
ANSYS系统建模与多学科仿真平台介绍

VHDL-AMS
基于语言的行为级建模
SPICE
ANSYS 3D 物理场的耦合与降阶
与嵌入式控制和软件的 紧密集成
功能模型接口FMI
基于标准的互操作性
多域模型库和工具
12
开放的模型接口实现0D-3D的全系统仿真
基于语言建模
多域模型库
三维物理场耦合仿真 降阶模型生成
嵌入式系统集成 功能模型接口 (FMI)
系统建模与多学科仿真平台介绍
在设计师的眼里……
Actuators 促动器
Sensors
传感器
Electronic Control
电子控制
Embedded Software
嵌入式软件
特定领域、以部件为中心
2
……最终系统的一部分
电子控制 嵌入式软件
促动器
运行剖面
传感器
运行条件
安全要求
3
……存在复杂的相互作用
19
如何保持物理模型的保真度?
…到这里?
a b
c
PMSM
基于方程/数据的
系统级行为模型
mech_rv
如何从这里…
高保真度3D物理场
Reduced-Order Model
降阶模型 ROM
一个简化的高保真度动力学模型,保留了必要的 行为特性以及主导效应,为了减少更复杂模型所 需的求解时间或存储容量。
20
关键措施: VHDL-AMS C/C++ SPICE SML Modelica
多域 模拟 数字 动力系统 制造商 特定应用
ANSYS 3D 物理场
ROM
降阶模型 电磁 流体 热
结构
ANSYS SCADE 第三方系统建模工具 (AMESim, Simulink, Dymola, GT Suite 等)
SimulationX多学科建模和仿真工具
SimulationX多学科建模和仿真工具
刘宝生
【期刊名称】《《CAD/CAM与制造业信息化》》
【年(卷),期】2009(000)009
【摘要】随着仿真技术的进步,系统建模仿真软件为研究和解决工程问题提供了很大帮助。
基于物理对象建模语言Modelica研发而成的SimulationX软件,实现了在统一平台下多学科领域的建模和仿真。
【总页数】3页(P34-36)
【作者】刘宝生
【作者单位】西普阳光教育科技有限公司
【正文语种】中文
【相关文献】
1.基于VBA工具开发椭圆齿轮的实体建模和仿真加工系统 [J], 杨世平;张高峰;符炜;胡自化
2.Maplesoft发布新一代多领域建模和仿真工具MapleSim [J],
3.多学科领域建模仿真平台SimulationX [J], 世冠科技(北京)有限公司
4.多学科实用性工具书《眼眶病多学科协同诊疗》(中文翻译版)出版发行 [J], 马建民
5.车动力总成系统建模和仿真的软件工具 [J],
因版权原因,仅展示原文概要,查看原文内容请购买。
solidworks_simulation功能特点_概述及解释说明
solidworks simulation功能特点概述及解释说明1. 引言1.1 概述Solidworks Simulation是一款强大的虚拟仿真软件,它能够在设计过程中提供准确、可靠的分析结果,实现产品性能优化和缩短开发周期的目标。
它基于有限元分析(FEA)的原理,通过对物体结构、热传导和动力学等方面进行模拟和分析,帮助工程师评估和改进产品设计。
1.2 文章结构本文将围绕Solidworks Simulation的功能特点展开讨论。
首先介绍其功能概述,包括其主要功能和应用范围;接着详细介绍其界面与操作,以帮助读者快速上手使用该软件;然后探讨不同类型的分析和工具,并解释其原理和应用;之后给出几个具体案例进行说明,并说明在实际应用中如何利用Solidworks Simulation 解决各类问题;最后总结该软件的功能特点和优势,并展望未来发展方向及应用领域扩展。
1.3 目的本篇文章旨在全面介绍Solidworks Simulation的功能特点及其解释说明。
通过阐述不同类型分析(如静力学、热传导和动力学)以及相应的工具,读者可以更好地了解该软件能够在不同领域中的应用。
我们希望通过本文的阐述,读者能够对Solidworks Simulation有一个清晰的认识,并为其在设计和工程实践中的应用提供参考。
2. Solidworks Simulation 功能特点:2.1 功能概述:Solidworks Simulation是一种基于CAD软件Solidworks平台上的有限元分析工具,提供了广泛的仿真功能,可用于结构、流体力学和热传导等领域的分析。
该功能强大且易于使用,旨在帮助工程师在设计过程中更好地评估产品性能,并优化设计。
2.2 界面与操作:Solidworks Simulation具有直观的用户界面,可以轻松导航和访问各种仿真功能。
用户可以通过几个简单的步骤设置和运行仿真分析,并查看结果以进行后续分析和优化。
simulationX教程(北京显达动力科技有限公司)1
工具对标准元件进行扩展,通过
添加端口增加元件的主要属性, 参数,变量,曲线,函数等等
显达动力科技有限公司
Page33
对已有模型进行封装
SimulationX可以对已经建立的模型进行封装,可以自定义其输入和输出端
口,参数,变量,曲线,函数等等
2009|Simpleware
Page34
内
1
2 3 4 5 6 7
显达动力科技有限公司
Page38
通过C代码输出进行实时仿真
Model.c
rtlmodule.c
ITI_IO.c
实时 OS (拥有 RTAI的Linux )
标准的 PC
标准的 I/O 硬件
显达动力科技有限公司
Page39
产业
典型用户
汽车制造商及汽车供 中 国 一 汽 , 吉 利 , Audi , BMW group , DaimlerChrysler , Bombardier-Rotax,Hyundai Motor Company,Siemens VDO 应商 Automotive,Takata-Petr,Visteon Systems ,Volkswagen , ZF Friedrichshafen ,ZF Sachs,... 工程机械设备 流体部件与系统 AGCO Xaver Fendt,Baker Hughes,Demag Mobile Cranes, Deutsche GROVE, New Holland Italia ,Putzmeister Bolenz & Schäfer,Bosch Rexroth ,Bürkert ,Eaton Fluid Power, ETO Magnetic Accumulator ,Moog ,Ognibene...
simulationx 精解与实例
simulationx 精解与实例摘要:一、simulationx 简介1.软件背景2.应用领域二、simulationx 精解1.功能模块解析2.技术特点三、simulationx 实例分析1.实例一:电磁场仿真2.实例二:电路仿真3.实例三:热力学仿真四、实战操作技巧与注意事项1.建模技巧2.仿真设置3.结果分析五、simulationx 在工程中的应用1.工业领域2.科研领域六、未来发展趋势与展望1.技术创新2.市场前景正文:一、simulationx 简介simulationx 是一款强大的仿真软件,起源于德国,应用于各个领域,如电磁场、电路、热力学等。
在我国,该软件被广泛应用于工程设计和科研领域,为工程师和研究人员提供了便捷的仿真分析工具。
1.软件背景simulationx 的开发始于20世纪90年代,经过多年的发展,现已成为国际上知名度较高的仿真软件。
其精度和可靠性得到了业界的广泛认可,成为许多工程师和研究人员的首选工具。
2.应用领域simulationx 适用于多种领域,如电气、机械、电子、热力学、流体等。
通过仿真分析,可以帮助工程师提前预测产品性能,优化设计方案,降低研发成本。
二、simulationx 精解1.功能模块解析simulationx 包含多个功能模块,如几何建模、网格划分、物理场仿真、求解器设置等。
这些模块可以帮助用户快速搭建模型,进行各种类型的仿真分析。
2.技术特点simulationx 具有以下技术特点:(1)高精度求解器:采用先进的求解算法,确保仿真结果的准确性。
(2)多种物理场仿真:支持多种物理场的耦合仿真,如电磁场与机械结构的耦合、电路与热场的耦合等。
(3)智能网格技术:自动适应复杂几何模型的网格划分,提高仿真精度。
(4)丰富的后处理功能:便于用户对仿真结果进行分析和可视化。
三、simulationx 实例分析1.实例一:电磁场仿真某电机产品在设计阶段,通过simulationx 进行电磁场仿真,预测电机运行时的磁场分布和电磁力。
跨学科物理系统建模和仿真工具Simscape
——跨学科物理系统建模和仿真工具Simscape是在Simulink基础上的扩展工具模块,用来建立多种不同类型物理系统的建模并进行仿真,例如由机械传动,机构,液压和电气元件构成的系统。
Simscape可以广泛应用于汽车业,航空业,国防和工业装备制造业。
Simscape同SimMechanics,SimDriveline,SimHydraulics和SimPowerSystems一起,可以支持复杂的不同类型(多学科)物理系统混合建模和仿真。
•使用统一环境实现多种类型物理系统建模和仿真,包括机械,电气和液压系统;•使用基本物理建模单元构造模型,并提供了建模所需的模块库和相关简单数学运算单元;•用户可自己指定参数和变量的单位,模块内部自动实行单位转换和匹配;•具有连接不同类型物理系统的桥接模块;•具备扩展产品所建模型的全权仿真和受限编辑功能,单独运行仿真时无需SimMechannics,SimDriveline和SimHydraulics的产品使用许可。
强大功能多学科系统物理建模在Simscape的环境中,用户的建模过程如同装配真实的物理系统。
Simscape采用物理拓扑网络方式构建模型:每一个建模模块都对应一个实际的物理元器件,例如油泵、马达或者运算放大器;模块之间的连接线代表元件之间装配和能量传递关系。
这种建模方式直观的表现出物理系统的组成结构,而不是用晦涩的数学方程。
Simscape根据模型所表达的系统组成关系,自动构造出可以计算系统动态特性的数学方程。
这些方程可同其他Simulink模型一起结合运算。
Simscape的建模库提供超过24个电气建模单元,15个液压建模单元,23个机械建模单元;这些单元之间可以互相连接,联合建模。
这些基本的单元也可以组合起来,构造更加复杂的器件模型。
Simscape模型中的Sensor模块用来测量机械量(力/力矩,速度),液压量(压力,流量)或电气量(电压,电流),测量输出的信号量可以输出给标准的Simulink模块处理。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一
一
—
—
——
—
—
—— J
。
_‘- ._
__- J _一
——
—— — — —— __________u__-。-。_________。_。_。_ J -
实现 ̄i]OPC-Client接 口;支持源代码输 出 ̄gSCARLE/RT(ProSys—RT
4.x):支持源代码输 出 ̄dSPACE、NI LabVIEW ̄DNI VeriStand,如
@X I千 匹 夼
在全球范 围内,哪里有引领潮流 的新技术开发 ,哪里就有SimuIationX的身影 。它已经成为众多工程师和科学家的 最佳搭档 。SimulationX是 基于标准的物理对象建模语言Modelica的先进大型工程软件 ,在全世界的研究机构和公司中 被广泛应 用。本 文将详细介 ̄SimulationX的功能特点 以及众 多行业解决方案。
2.SimulationX具 有 强 大 的3D 多体 功 能
化、发 动机和车辆各 系统 以及 电磁液驱动机构的设计等 。不同领
SimulationX提供 了能够从CAD文件导入装配 关系 的3D多体
域的模块之间直观的物理连接方式,使得SimulationX成为多学科 库。液压或 电机等动力源可 以直接跟3D的机械结构连接 在一起 ,
J。-._。-。。-。--‘。_。●●●-_。_。_。_●-___- ___。_____J_一
24 CAD/CAM与制造业信息化 - ,ww idnovo.com.ca
栏 目主持 :侯 琳 投稿 信箱 :houl@idnovo.com.cn
立一个全新的模型 。 SimulationX的信号库还 可以做流程 图State chart(State
库模型个性化 ,包括 用户模型的加密 、封装等 ;COM接 口;打印
引擎 ;时域 瞬态仿真 ;频域稳 态仿真 。
2.专 用 库
(1)机械库包括 :一维转动分析 ;一维 平动分 析 :与ANSYS
3.SimulationX提 供 了C代 码 输 出功 能
的接 口基 于 模 态 分 析 ,如 图6所 示 。
领域系统 工程建模和仿真 的理想环境 ,如图 1所示 。
用于研 究完整的动作执行过程。这就比使用一个 多体软件进行共
仿真 (B ̄!]ADAMS)的效率高很 多 ,如图2N图4所示。
2.多学科领 域技 术应 用支持 通过2O余年专业知识的累积与发展 ,SimulationX在车辆 、航 空航天、船舶 、工程机械 、精密机械、石油和能源等诸多工业领 域都有着完善的解决方案以及 大量的成 功应 用案例。 世冠公 司作 为多学科领域 系统 仿真 的技术供 应商 ,由外籍 技术专 家Lionel Belmon带领的 、以博士生为主体 的技术支持 团 队是广大 中国用户的坚实后盾。世 冠公 司不仅为用户提供 了多场 次 、多学科、多层次 的专题系统仿真技术研讨会 ,更是在 多年的 项 目实践过程 中为用户的工程项 目提供 了强 有力的技术保障。
SimulationX在统一 的平台上实现 了多学科领域 系统 工程的 Fluiddesigner(流体 设计 )能够 帮助用户建立新 的流体模 型 ,
建模和仿真 ,包括机械 、液压、气动 、热 、电和磁等物理领域 , 如 新 的 油和 制冷 剂等 。
可 用于航空航天 的机一电一液一气系统设计 、机器人及控 制系统优
用户可以对输 出的C代 码进行修订和 编译 ,C代码可 以 自由
使 用且不受License的限制。例如 ,可以输出C代码 的simulink S
函数 ,该函数能在 多个部门 自由使用并发往其他部门或单位 。这
种C代码 输 出功 能 对 于 实 时 (real—time)应 用 来 说也 是 非 常便 利
flow),与Simulink中的流程图功能一样 出色。
三、基本模块 和功能
Si mu lationX软件按 学科库对模块 进行划分 ,其模块 如下。
I.建模 和仿 真 平 台
建模和 仿真 平台功 能包括 :TypeDesigner(基于Modelica的
编 译器 ),用户可以用其进行 高级开发 ,可 自定义超级模块 ,使
埔- -—一‘ I l fO
l ’ 圈■曩r●■c I
口
r lt ..-
嚆 令 爵r
.
~ -——黄 ]
P矗_ № 厂] ∞ l=. 竺1
¨
。广
1 .
一 I
垡竺 I
lllllll l
.
●l·●眦 -■
njj
二 、五 大 优 势
1.SimulationX ̄ - 个 基 于Modeaca的 开放 平 台 在SimulationX中能够调 用Modeliea标 准库 ,为基本库提供 了 开 源 的 模 型 。 正 因为 SimulationX基 于 Modelica,所 以针 对 用 户需求进行 二次开发就 变得非 常容易 ,用户可以将 自己的方程 纳入 到模 型 中去 。
多学科 领 域 建模 仿 真 平 台S i m u l ati o n X
口 世 冠 科 技 (北 京 )有 限 公 司
一 、 概 述
1.多学科领域建模仿 真平 台
此 外 , S1mu]at1onX提 供 了 很 多 工 具 , 允 许 用 户 设 黄 参 数 、 变 量 和 模 型 ,来 开 发 新 的 元 件 。 例 如 Typdesigner,其
的,因为这些C代码能够方便地进行编译并 且集成到不同的实时
平 台上。而通 常其他 的软件 不能支持模 型输 出 ,必须要 求一个
License来运行模型 。也就是说 ,模型无法脱离软件本身被使 用。
C代码输 出 支 持源代码输 出,通过S-function实现 ̄Matlab
接口;支持源代码输 出,实现 ̄[]SIMPACK接 口:支持源代码输出 ,