基于线性约束最小方差(LCMV)准则的极化滤波算法
lms杂波抑制算法

lms杂波抑制算法LMS杂波抑制算法LMS(Least Mean Squares)算法是一种常用的自适应滤波算法,用于杂波抑制和信号增强。
本文将介绍LMS杂波抑制算法的原理、应用以及优缺点。
一、LMS杂波抑制算法原理LMS算法基于最小均方差准则,通过迭代更新滤波器系数,使得输出信号与期望信号之间的均方差最小化。
其基本原理如下:1. 初始化滤波器系数向量w和步长参数μ;2. 输入待滤波的信号x和期望信号d;3. 计算滤波器的输出y,即滤波器系数向量w与输入信号x的卷积;4. 计算误差e = d - y;5. 更新滤波器系数向量w,w(n+1) = w(n) + μ * e * x;6. 重复步骤3至5,直至满足停止准则。
LMS算法通过不断迭代更新滤波器系数,逐步逼近期望输出信号,从而实现对杂波的抑制。
二、LMS杂波抑制算法应用LMS算法在通信、音频处理、图像处理等领域广泛应用,主要用于杂波抑制和信号增强。
1. 通信领域:LMS算法可用于自适应均衡器,对信道中的多径效应进行抑制,提高通信质量和传输速率。
2. 音频处理领域:LMS算法可用于自适应降噪,通过抑制环境噪声,提高音频信号的清晰度和质量。
3. 图像处理领域:LMS算法可用于自适应滤波,去除图像中的噪声和杂波,使图像更加清晰。
三、LMS杂波抑制算法优缺点LMS算法具有以下优点:1. 简单易实现:LMS算法的原理简单,计算量小,易于实现。
2. 自适应性强:LMS算法能够根据输入信号的动态变化,自适应地调整滤波器系数,适用于不同环境下的杂波抑制。
3. 实时性好:LMS算法的迭代更新速度快,适用于实时信号处理。
然而,LMS算法也存在一些缺点:1. 收敛速度慢:LMS算法的收敛速度较慢,需要较长的迭代次数才能达到较好的抑制效果。
2. 系统误差:LMS算法对输入信号的统计特性较为敏感,当输入信号存在非高斯分布或非平稳特性时,可能导致系统误差。
3. 存在性能限制:LMS算法在某些情况下可能无法达到理想的抑制效果,需要结合其他算法或方法进行改进。
卡尔曼滤波算法基本原理

卡尔曼滤波算法基本原理一、概述卡尔曼滤波算法是一种基于线性系统状态空间模型的递归滤波算法,主要用于估计含有噪声的测量数据,并能够有效地消除噪声对估计的影响,提高估计精度。
本篇文章将详细介绍卡尔曼滤波算法的基本原理。
二、基本原理1.状态方程:卡尔曼滤波算法基于线性系统状态空间模型,该模型可以用状态方程来表示。
状态方程通常包含系统的内部状态、输入和输出,可以用数学公式表示为:x(t+1)=Ax(t)+Bu(t)+w(t)。
其中,x(t)表示系统内部状态,u(t)表示输入,w(t)表示测量噪声。
2.测量方程:测量数据通常受到噪声的影响,卡尔曼滤波算法通过建立测量方程来处理噪声数据。
测量方程通常表示为:z(t)=h(x(t))+v(t),其中z(t)表示测量数据,h(x(t))表示系统输出,v(t)表示测量噪声。
3.卡尔曼滤波算法:卡尔曼滤波算法通过递归的方式,根据历史状态和测量数据来估计当前系统的内部状态。
算法的核心是利用过去的估计误差和测量误差来预测当前的状态,并不断更新估计值,以达到最优估计的效果。
卡尔曼滤波算法主要包括预测和更新两个步骤。
预测步骤根据状态方程和上一步的估计值,预测当前的状态;更新步骤则根据当前的测量数据和预测值,以及系统协方差矩阵,来更新当前状态的估计值和系统协方差矩阵。
4.滤波器的选择:在实际应用中,需要根据系统的特性和噪声的性质来选择合适的卡尔曼滤波器。
常见的滤波器有标准卡尔曼滤波器、扩展卡尔曼滤波器等。
选择合适的滤波器可以提高估计精度,降低误差。
三、应用场景卡尔曼滤波算法在许多领域都有应用,如航空航天、自动驾驶、机器人控制等。
在上述领域中,由于系统复杂、噪声干扰大,使用卡尔曼滤波算法可以有效地提高系统的估计精度和控制效果。
四、总结卡尔曼滤波算法是一种基于线性系统状态空间模型的递归滤波算法,通过预测和更新的方式,能够有效地消除噪声对估计的影响,提高估计精度。
本篇文章详细介绍了卡尔曼滤波算法的基本原理和应用场景,希望能对大家有所帮助。
波束形成算法及其新进展ppt课件

“雪亮工程"是以区(县)、乡(镇) 、村( 社区) 三级综 治中心 为指挥 平台、 以综治 信息化 为支撑 、以网 格化管 理为基 础、以 公共安 全视频 监控联 网应用 为重点 的“群 众性治 安防控 工程” 。
引言
波束形成是阵列信号处理、智能天线系统中一重要技术 使用阵列天线的优点:
-提高系统的容量 -提高系统的性能 -抑制干扰和噪声 -节省功率
2.2 Bartlett 波束形成算法
Bartlett 波束形成算法是使得波束形成的输出功率相对 于某个输入信号最大。
ar m g [E a { w H x x (n )xH (n )w }] w
wba
a() aH()a()
“雪亮工程"是以区(县)、乡(镇) 、村( 社区) 三级综 治中心 为指挥 平台、 以综治 信息化 为支撑 、以网 格化管 理为基 础、以 公共安 全视频 监控联 网应用 为重点 的“群 众性治 安防控 工程” 。
d 个独立信源,则 Rank [ R S ] d ,则有
E E S
EN
,
S
0
0
N
S diag 1 2 d
N diag d 1 d 2 m
E S e1 e2 ed
E N e d 1 e d 2 e m
1 2 d d 1 d 2 m
“雪亮工程"是以区(县)、乡(镇) 、村( 社区) 三级综 治中心 为指挥 平台、 以综治 信息化 为支撑 、以网 格化管 理为基 础、以 公共安 全视频 监控联 网应用 为重点 的“群 众性治 安防控 工程” 。
目录
§0.引言 §1.阵列天线的统计模型和DOA估计 §2.常用的波束形成算法 §3.自适应波束形成算法及其改进 §4.采样协方差求逆SMI算法改进 §5.其他波束形成算法 §6.总结
LCMV波束形成器算法研究的开题报告

LCMV波束形成器算法研究的开题报告一、选题背景波束形成技术是一种将多个单元阵列/远场点信号进行合成,产生一个方向性高的复合天线的技术。
在现代通信和雷达系统中,波束形成是一项重要的技术。
对于通信系统来说,它可以提高信噪比、在复杂的多径和干扰环境中提高信号质量。
在雷达系统中,它可以增加雷达的发射能量和接收灵敏度,提高目标探测率和跟踪精度。
因此,波束形成技术在通信和雷达系统的应用上有着广泛的应用。
在波束形成技术中,线性约束最小方差(LCMV)算法是一种广泛应用的波束形成算法。
LCMV算法可以通过调整权重系数,抑制不必要的信号干扰和噪声干扰,使得目标信号的信噪比得到增强,从而提高系统的性能。
因此,对于LCMV算法的研究和优化有着重要的意义。
二、研究内容本项目的研究内容为LCMV波束形成器的算法研究。
首先将针对LCMV算法进行深入的分析和研究,并结合实际问题,提出一种更加高效和实用的LCMV算法。
同时考虑到信号干扰和噪声干扰的问题,将在算法中采用适当的抑制方法,提高信噪比和抗干扰能力。
最后将对算法进行仿真测试和性能分析,评估算法的可行性和实用性。
三、研究意义本项目的研究针对LCMV波束形成器的算法,在通信和雷达系统中有着广泛的应用。
该研究的成果将具有以下几个方面的意义:1、提高通信和雷达系统的性能,增强目标信号的信噪比和抗干扰能力,提高探测率和跟踪精度。
2、为研究和设计更加高效和实用的波束形成算法提供经验和参考。
3、加深对LCMV算法的理解,促进其在其他应用领域的研究和应用。
四、研究方法本项目将采取以下研究方法:1、对LCMV算法进行深入的分析和研究,理解其基本原理和关键技术。
2、结合实际问题,提出一种更加高效和实用的LCMV算法,并考虑对信号干扰和噪声干扰的抑制方法。
3、对算法进行仿真测试和性能分析,评估其可行性和实用性。
五、预期结果本项目预期达到以下几个方面的结果:1、深入理解LCMV算法的原理和关键技术。
mvdr波束形成算法

mvdr波束形成算法MVDR波束形成算法全称为最小方差无偏估计(Minimum Variance Distortionless Response),也被称为逆滤波器法(Inverse Filtering)。
该算法是一种基于自适应滤波的波束形成技术,可以用于抑制干扰并提高信噪比。
在信号处理中,MVDR波束形成算法是基于传感器阵列收集到的多个输入信号进行处理和滤波,其目标是得到一个合成信号,使得该合成信号的信噪比尽可能高,同时抑制干扰的影响。
具体实现方法是通过自适应滤波器不断地调整各传感器的权重系数,使得输出信号的方差最小,从而达到抑制干扰的目的。
MVDR波束形成算法的主要优点是可以针对复杂的信号环境进行处理,并能够有效地抑制强干扰的影响,提高接收信号的质量和精度。
同时该算法还可以灵活地适应不同的信号类型,具有较好的通用性和适用性。
MVDR波束形成算法的主要步骤包括:确定阵列几何结构,计算协方差矩阵,根据所选目标函数构造约束条件,最小化方差估计,以获取最佳波束形成滤波器。
总之,MVDR波束形成算法是一种常用的自适应波束形成技术,可以用于抑制干扰和提高信噪比,在语音识别、雷达图像处理等领域有着广泛的应用。
MVDR波束形成算法的公式如下:先定义d(θ)为到达角为θ的信号入射方向与阵列垂线之间的夹角,s(n)为阵列接收到的输入信号向量,w(n)为自适应滤波器系数向量,x(n)为合成信号向量,则可得到以下公式:其中,HH表示共轭转置。
MVDR波束形成算法的目标是最小化输出信号的方差,即:其中,E[\cdot]E[⋅]表示期望操作。
进一步地,我们可以引入约束条件来保证信号不失真,即:由此,可以得到MVDR波束形成算法的优化问题表达式为:通过求解该优化问题,可以得到最佳的自适应滤波器系数向量w(n)w(n),从而实现MVDR波束形成的功能。
基于MATLAB仿真的LCMV和LCEC算法性能比较
基于MATLAB 仿真的LCMV 和LCEC 算法抗干扰性能比较研究一、 均匀直线阵列信号模型在本次仿真实验中,假设3个窄带信号入射到阵元数为16的均匀直线阵列天线上,阵元间距为0.5λ,入射角方向分别为012,,θθθ。
对阵列接收数据进行采样,则第n 次采样数据表示为:()()()01122()()()()()x n s n a I n a I n a N n θθθ=+++(1)其中()s n 为期望信号,1()I n 、2()I n 分别为两个干扰信号方向,()N n 为噪声信号。
sin()(1)sin()T ()[1...]i i jkd jk N d i a e e θθθ-=为入射方向i θ的方向性矢量。
二、 L CMV 算法原理LCMV 准则:选择权重系数w ,使得在对w 有一定约束的条件下,阵列输出()y n 的方差最小,即2H {|()|}{}xx E y n E w R w =最小。
利用拉格朗日乘子法可求得权重系数的最优解为1H 11[]opt xx w R C C R C f ---=(2)其中,H C w f =为约束条件。
本实验中,期望信号只有一个方向0θ,所以 0(),1C a f θ==。
因此最优解可以改为1H 11000()[()()]opt xx w R a a R a θθθ---=(3)求得的最优权矢量在能保证期望信号方向增益一定的情况下,使系统输出功率最小,从而有效地抑制干扰和噪声。
三、 L CEC 算法原理通过对接收信号协方差矩阵xx R 的特征分解得到干扰子空间s U ,间接提取干扰信息,然后通过干扰特征向量来抑制干扰,即相当于对干扰方向施加零点约束。
优化函数如下所示H H 0arg min opt s U w C w fw w w ===(4)采用拉格朗日乘子法可求得权重系数的最优解为H H H 1H H H 1()[()][]s s n n opt s s n n w I -U U C C I -U U C f U U C C U U C f --==(5)同样,本实验中,期望信号只有一个方向0θ,所以 0(),1C a f θ==。
卡尔曼滤波的先决条件
卡尔曼滤波的先决条件卡尔曼滤波是一种常用的估计和滤波方法,广泛应用于机器人、导航系统、信号处理等领域。
在使用卡尔曼滤波之前,需要满足一些先决条件,以确保滤波算法的有效性和准确性。
1. 系统的线性动力学:卡尔曼滤波是基于线性动力学模型的,因此系统的运动模型必须是线性的。
对于非线性系统,可以通过线性化或者使用扩展卡尔曼滤波等方法进行处理。
2. 系统的高斯噪声假设:卡尔曼滤波假设系统的测量噪声和过程噪声都是高斯分布的。
这个假设在实际应用中并不总是成立,但是在许多情况下,可以通过适当的变换将非高斯噪声转化为高斯噪声。
3. 系统的可观测性和可控性:卡尔曼滤波要求系统是可观测的,即通过系统的输出可以唯一确定系统的状态。
同时,系统也必须是可控的,即可以通过控制输入使系统的状态在有限时间内到达任意给定状态。
4. 系统的稳定性:卡尔曼滤波假设系统是稳定的,即系统的状态在时间上是平稳的,不存在突变或者漂移。
如果系统存在非平稳性,可以使用扩展卡尔曼滤波等方法进行处理。
5. 测量和过程噪声的统计特性已知:卡尔曼滤波需要事先知道测量噪声和过程噪声的统计特性,包括均值和协方差矩阵。
这些统计特性可以通过实验测量或者理论分析得到。
6. 初始状态的先验知识:卡尔曼滤波需要事先知道系统的初始状态。
对于初始状态的估计不准确或者不完全了解时,可以使用扩展卡尔曼滤波等方法进行处理。
7. 系统的线性度:卡尔曼滤波要求系统的线性度较高,即系统的非线性特性较小。
对于高度非线性的系统,可以使用非线性滤波方法如粒子滤波进行处理。
卡尔曼滤波的先决条件是保证滤波算法能够有效地估计系统的状态。
在实际应用中,需要根据具体情况对这些先决条件进行评估和满足。
同时,也可以根据实际情况进行适当的调整和改进,以提高滤波算法的性能和适用性。
总结起来,卡尔曼滤波的先决条件包括系统的线性动力学、高斯噪声假设、可观测性和可控性、稳定性、已知的噪声统计特性、初始状态的先验知识和系统的线性度。
卡尔曼滤波
什么是卡尔曼滤波?卡尔曼滤波器(Kalman Filter )是一个最优化自回归数据处理算法(optimal recursive data processing algorithm )。
卡尔曼滤波是以最小均方误差为估计的最佳准则,来寻求一套递推估计的算法,其基本思想是:采用信号与噪声的状态空间模型,利用前一时刻地估计值和现时刻的观测值来更新对状态变量的估计,求出现时刻的估计值。
它适合于实时处理和计算机运算。
现设线性时变系统的离散状态防城和观测方程为:X(k) = F(k,k-1)·X(k-1)+T(k,k-1)·U(k-1)Y(k) = H(k)·X(k)+N(k)其中X(k)和Y(k)分别是k 时刻的状态矢量和观测矢量F(k,k-1)为状态转移矩阵U(k)为k 时刻动态噪声T(k,k-1)为系统控制矩阵H(k)为k 时刻观测矩阵N(k)为k 时刻观测噪声则卡尔曼滤波的算法流程为:预估计)(X k = F(k,k-1)·X(k-1)计算预估计协方差矩阵Q(k) = U(k)×U(k)')(k C =F(k,k-1)×C(k)×F(k,k-1)'+T(k,k-1)×Q(k)×T(k,k-1)'计算卡尔曼增益矩阵R(k) = N(k)×N(k)'K(k) = )(k C ×H(k)'/[H(k)×)(k C ×H(k)’+R(k)]更新估计)(X ~k =)(X k +K(k)×[Y(k)-H(k)×)(X k ]计算更新后估计协防差矩阵)(C ~k = [I-K(k)×H(k)]×)(k C ×[I-K(k)×H(k)]'+K(k)×R(k)×K(k)'X(k+1) = )(X ~kC(k+1) =)(C ~k重复以上步骤。
现代雷达信号处理
x1 (t ) = s (t )e jωt
( ) ( ) x2
t
=s t
e d jωt
j 2π d sinθ λ
M
( ) ( ) xN
t
=s
t
e e jωt
j 2π ( N −1)d sinθ
λ
雷达信号处理重点实验室
一、背景知识
写成矢量的形式:
X
(t
)
=
⎡ ⎢ ⎢ ⎢
x1 x2
(t) (t)
M
⎤ ⎥ ⎥ ⎥
2⎤ ⎥⎦
=
E
E JM 2
JM 2 − P H R−1P
窄带单复 权:
[[ ]] Wopt
=
E
JM
J* A
E JA 2
=ρ
JCR = 1 1− ρ 2
雷达信号处理重点实验室
[ ] P
=
E
y* m
X
a
ρ 为相关系
数。
三、旁瓣相消技术SLC(sidelobe cancellation)
假设主天线和辅助天线按直线排列,4个辅助天线为阵元间距为半波 长的等距线阵,阵中心与主天线相距4倍波长,辅助天线的增益与主 天线的主瓣增益之比为-16分贝(与主天线的旁瓣大体相当),主天 线通道和辅助天线通道的噪声功率相同。
=
0时,Δθ
=
65λ
Nd
(o )
[峰值旁瓣为 − 25 ~ -28dB时]
雷达信号处理重点实验室
一、背景知识
20 个 阵 元 , 阵 元间隔半波 长,波束指向0 度 , 加 了 40dB 的Chebyshev窗
雷达信号处理重点实验室
一、背景知识
几种卡尔曼滤波算法理论
几种卡尔曼滤波算法理论卡尔曼滤波(Kalman Filtering)是一种状态估计的方法,用于从不完全和带有噪声的观测数据中,估计出系统的状态。
它的基本思想是结合系统的动态模型和观测数据,通过最小化估计值与观测值之间的误差,实现对系统状态的准确估计。
以下是几种常见的卡尔曼滤波算法理论:1. 离散时间线性卡尔曼滤波(Discrete-Time Linear Kalman Filtering):这是最基本、最常用的卡尔曼滤波算法。
它适用于系统的动态模型和观测模型均为线性的情况。
该算法基于状态方程和观测方程,通过递推的方式估计系统的状态。
2. 扩展卡尔曼滤波(Extended Kalman Filtering):扩展卡尔曼滤波是一种非线性状态估计方法,用于处理非线性系统。
该算法通过在线性化非线性函数,将非线性系统转化为线性系统,然后应用离散时间线性卡尔曼滤波算法进行估计。
3. 无迹卡尔曼滤波(Unscented Kalman Filtering):无迹卡尔曼滤波是对扩展卡尔曼滤波的改进。
与扩展卡尔曼滤波通过线性化非线性函数来估计系统状态不同,无迹卡尔曼滤波通过选择一组特殊的采样点(称为Sigma点),通过这些采样点的传播来逼近非线性函数的统计特性。
4. 无过程噪声卡尔曼滤波(Kalman Filtering with No Process Noise):通常情况下,卡尔曼滤波算法假设系统的状态方程和观测方程中都存在噪声项,即过程噪声和观测噪声。
然而,在一些特殊的应用领域中,系统的状态方程并不包含过程噪声,只存在观测噪声。
无过程噪声卡尔曼滤波算法就是针对这种情况设计的。
5. 卡尔曼平滑(Kalman Smoothing):卡尔曼滤波算法是一种递推算法,只使用当前的观测数据和先前的状态估计,来估计当前的状态。
而卡尔曼平滑算法则是一种回溯算法,根据所有的观测数据来获得更优的对过去状态的估计。
卡尔曼平滑算法一般通过前向-后向过程来实现。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
- 1 -基于线性约束最小方差(LCMV )准则的极化
自适应滤波算法
乔晓林1,薛敬宏2,邵仙鹤3
(哈尔滨工业大学(威海)信息技术研究所,山东威海264209)
E-mail (xuejinghong@ )
摘 要:针对强干扰环境下,基于线性约束最小方差(LCMV)准则,提出了一种极化域新的自适应滤波算法,采用变极化接收技术,实现对信号的最佳接收,仿真结果也证明了该方法的有效性。
关键词: 线性约束最小方差;极化;自适应滤波
1 引言 当雷达目标信号与强干扰信号在时域、频域和空域的状态特征难以区分时,若两者在极化域可分,则可利用极化信息进行雷达目标检测和识别[1]。
极化滤波是在基于研究波的偏振特性基础上进行的一种空间滤波的信号处理方法,在前人做的很多工作中,都是假设目标和干扰信号的极化状态是已知的或是不变的,而由于干扰信号的Sinclair 散射矩阵[2]是未知的,或随时间或空间缓慢变化的,如果采用权系数不变的滤波器,则会因为滤波器的“凹口”不能对准干扰信号,而使信噪比降低。
自适应滤波技术在时域和空域(智能天线)都得到了很大发展,本文试图在极化域推导出一种新的自适应滤波器算法,在干扰信号极化状态改变时,滤波器“凹口”能始终对准干扰信号,从而使输出达到“最优”。
2 极化估计 假设对于采用垂直极化天线发射,水平垂直正交双极化接收天线的雷达系统,任意接收电场可用二维矢量表示:
T v h X X X ],[=
其中h X 和v X 分别表示水平和垂直极化天线接收的电场矢量,T 表示转置。
则天线接收电压为:
X h V T .= (1)
其中h 为接收天线的Jones 矢量。
雷达极化信息可由极化相干矩阵完全表征,极化相干矩阵C 定义为:
C={}T X
X E . (2)
其中C 为Hermite 矩阵。
极化相干矩阵可以通过最大似然法估计得到[3]: T i N
i i X X N
C ∑==11~ (3) 由此可得天线接收功率的估计为: {}{}{}h C h h C h h XX E h X h X h E VV E P T T T T T T T T .~
.....)).((~=====&
- 2 -
(4)
3 自适应极化滤波原理
波门内的采样数据为接收信号(包括信号和干扰)的样本集{}N X X X X L ,,21=,由于雷达发射信号的脉冲重复周期一般远大于脉冲宽度,因而根据雷达探测距离,可选用大于回波最大延时时间的样本集{}cN c c C X X X X L ,,21=作为干扰样本的估计值[4],则有用信号的样本集},,,{2211cN N c c c s X X X X X X X X X −−−=−=L 。
根据线性约束最小方差(LCMV )准则,在保证有用信号电压不变的约束条件下,使接收的功率最小。
有用信号电压不变,即有用信号功率不变,此时接收功率最小,实际上相当于滤除了干扰信号,提高了信噪比。
同时,接收功率的估计与极化相干矩阵的估计有关,而极化相干矩阵的估计随干扰极化状态的改变而改变,因而可实现自适应滤波。
4 自适应滤波算法
假设接收机噪声为独立同分布的高斯白噪声,则可认为完全未极化波,有用信号电压s V 可表示为:
s T s X h V .= (5)
其中: s V 为有用信号电压。
根据线性约束最小方差(LCMV )准则,最佳天线极化为如下约束条件优化问题的解:
min h C h P x T x .~.=, s.t. const X h V s T
s ==. (6) 其中:
x P 为接收信号功率,x C ~为接收信号极化相干矩阵,不失一般情况,令1.==s T s X h V 。
构造拉格朗日函数:
)1..(.~.)(−+=s T x T X h h C h h L λ (7) 令:
()0..~*2=+=∇s x h X h C h L λ (8)
(8) 式两边同乘T h ,得:
0...~.*2=+s T x T X h h C h λ (9)
当opt h h =时,即最优接收时,因为1.=s opt T X h
及opt x opt T x h C h P .~.min =,则:
min *2x P −=λ (10) 将(10)式代入(8)式得:
s x x opt X C P h .~.1min −= (11) 将(11)式代入h C h P x T x .~
.=可得:
s x T s x X C X P ..1min −= (12) 5 递推算法 如上自适应滤波算法关键是求解极化相干矩阵的估计x C ~,可由递推公式得到,以减少
- 3 -
计算量,实现对干扰的实时“跟踪”。
假设已经获得n 时刻的极化相干矩阵的估计)(~
n C x ,由(3)式知: )(~n C x ∑==N i T i i
X X N 1.1
则n+1时刻的极化相干矩阵的估计)1(~
+n C x 为: ..(1)(~)..(1.1.1)1(~11111111112T T N N x T T N N T
i N i i T i
N i i x X X X X N
n C X X X X N X X N X X N n C −+=−+==+++++=+=∑∑(13) )(~n C x 可任选一Hermite 矩阵。
6 仿真
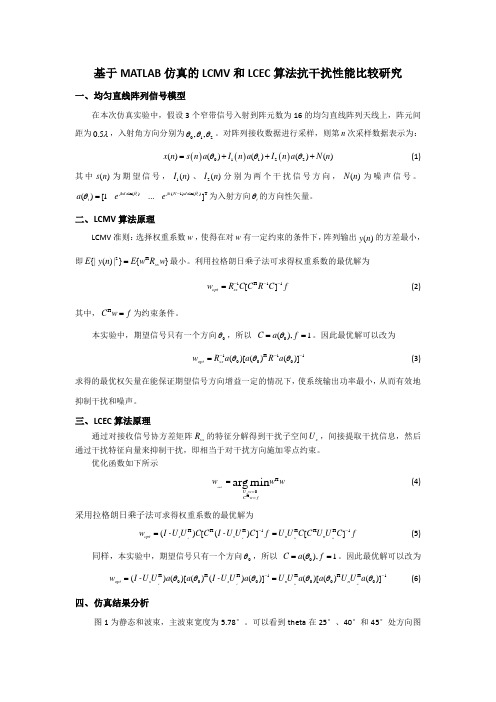
本实验杂波采用45度线极化,在采样点区间[1100,1200]加入的信号为垂直线极化,杂干比(INR )大于20dB,信号强度弱于杂波强度,相干矩阵估计中的N=20,相干矩阵估计的初始值22)0(~
×=I C x ,仿真结果见下图:
极化自适应滤波仿真结果
从上图可见,当信号极化状态与杂波干扰极化状态有区别时,信号得到增强,可有效滤除干扰信号,有利于信号的检测。
7 结论 本文基于线性约束最小方差(LCMV)准则,提出并推导了一种极化域的自适应滤波算法,并对极化相干矩阵的估计给出了递推算法,该方法适应于干扰极化状态未知和时变的情况下,采用变极化接收技术,实现对干扰信号的自适应滤波。
参考文献
[1] 乔晓林.高频地波超视距雷达的目标检测问题:[博士学位论文].哈尔滨工业大学,1991.
[2] 庄钊文,肖顺平,王雪松.雷达极化信息处理[M].北京:国防工业出版社,1999.
[3] 徐振海,王雪松,肖顺平, 庄钊文.极化自适应递推滤波算法[J].电子学报,2002,30(4).
[4] 张国毅,刘永坦.高频地波雷达多干扰的极化抑制[J].电子学报,2001,29(9).
Adaptive Filtering in Polarization Domain with
the Criterion of LCMV
Qiao Xiao-lin,Xue Jing-hong,Shao Xian-he
(Information Technology Institute,Harbin Institute of Technology in Weihai,Weihai
264209,China)
Abstract
With respect to the strong jamming environment, a new adaptive filtering algorithm in polarization domain with the criterion of Linear Constraint Minimum Variance(LCMV) has been investigated. The signal is optimized according to the variable polarization of antenna. Simulations are shown and results are in good agreement with theoretical analysis.
Key word: LCMV; polarization; adaptive filtering
- 4 -。