单脉冲雷达系统通道一致性校正方法研究
雷达系统中的信号处理技术
雷达系统中的信号处理技术摘要本文介绍了雷达系统及雷达系统信号处理的主要内容,着重介绍与分析了雷达系统信号处理的正交采样、脉冲压缩、MTD和恒虚警检测几种现代雷达技术,雷达系统通过脉冲压缩解决解决雷达作用距离和距离分辨力之间的矛盾,通过MTD来探测动目标,通过恒虚警〔CFAR〕来实现整个系统对目标的检测。
关键词雷达系统正交采样脉冲压缩MTD 恒虚警检测1雷达系统概述雷达是Radar〔Radio Detection And Ranging〕的音译词,意为“无线电检测和测距”,即利用无线电波来检测目标并测定目标的位置,这也是雷达设备在最初阶段的功能。
雷达的任务就是测量目标的距离、方位和仰角,还包括目标的速度,以及从目标回波中获取更多有关目标的信息。
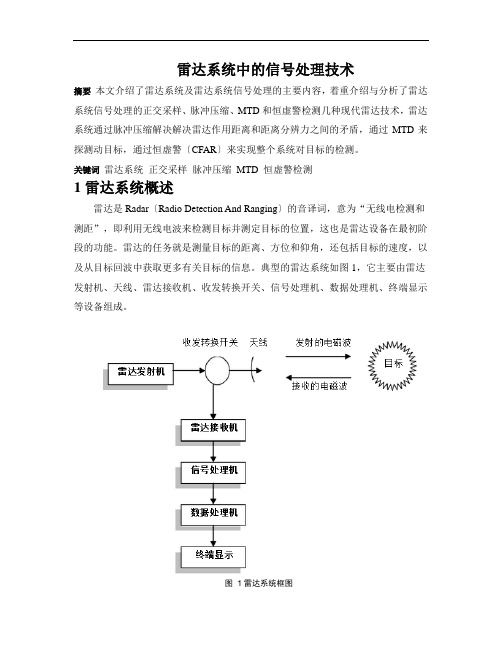
典型的雷达系统如图1,它主要由雷达发射机、天线、雷达接收机、收发转换开关、信号处理机、数据处理机、终端显示等设备组成。
图1雷达系统框图随着现代电子技术的不断发展,特别是数字信号处理技术、超大规模集成数字电路技术、电脑技术和通信技术的告诉发展,现代雷达信号处理技术正在向着算法更先进、更快速、处理容量更大和算法硬件化方向飞速发展,可以对目标回波与各种干扰、噪声的混叠信号进行有效的加工处理,最大程度低剔除无用信号,而且在一定的条件下,保证以最大发现概率发现目标和提取目标的有用信息。
雷达发射机产生符合要求的雷达波形,然后经馈线和收发开关由发射天线辐射出去,遇到目标后,电磁波一部分反射,经接收天线和收发开关由雷达接收机接收,然后对雷达回波信号依次进行信号处理、数据处理,就可以获知目标的相关信息。
雷达信号处理的流程如下:图 2 雷达信号处理流程2雷达信号处理的主要内容雷达信号处理是雷达系统的主要组成部分。
信号处理消除不需要的杂波,通过所需要的目标信号,并提取目标信息。
内容包括雷达信号处理的几个主要部分:正交采样、脉冲压缩、MTD和恒虚警检测。
正交采样是信号处理的第一步,担负着为后续处理提供高质量数据的任务。
一种改进的相控阵雷达和差波束测角方法

一种改进的相控阵雷达和差波束测角方法张海龙;宋虎;张宁;匡华星【摘要】介绍了3种常见的和差波束测角方法.分析了不同测角方法的优缺点.结合实际项目工程应用提出了一种改进后的相控阵雷达和差波束比幅测角方法.在不同信噪比和T/R组件幅相不一致性的条件下对改进后的和差波束测角的精度影响进行了分析.实际数据测试结果证明了改进方法的正确性和有效性.【期刊名称】《雷达与对抗》【年(卷),期】2018(038)001【总页数】4页(P26-29)【关键词】相控阵雷达;和差波束;信噪比;幅相不一致性【作者】张海龙;宋虎;张宁;匡华星【作者单位】中国船舶重工集团公司第七二四研究所,南京211153;中国船舶重工集团公司第七二四研究所,南京211153;中国船舶重工集团公司第七二四研究所,南京211153;中国船舶重工集团公司第七二四研究所,南京211153【正文语种】中文【中图分类】TN955.20 引言随着现代电子技术的飞速发展,为了适应现代战场环境的复杂化,实现对多个目标的高数据率跟踪,相控阵雷达系统应运而生。
相控阵雷达采用波束快速捷变的方式实现对多批目标的快速覆盖。
考虑到雷达系统的有限时间资源,一般相控阵雷达采用同时跟踪和搜索方式解决高数据率与波束空间覆盖的矛盾,跟踪方式大多采用和差波束单脉冲测角实现。
在有限的时间资源内利用和差波束实现对目标的高精度测量是现代相控阵雷达持续追求的目标。
因此,研究相控阵雷达和差波束测角及其性能具有很大的工程应用价值。
[1]近些年和差波束测角方法无论是在军用雷达还是在民用雷达应用的都比较多,一些研究所和高校在这方面也做了大量的工作。
研究表明,为了实现对目标的高精度测角,对相控阵和差波束形成方法的研究显得尤为重要。
[2]1 3种不同和差波束测角方法性能比较相控阵雷达按照搜索方式分为TWS和TAS两种类型。
对于TAS一般采用和差波束比幅测角方法。
和差波束测角主要是根据波束指向和目标位置,通过设置导向矢量,形成和波束与对应的差波束,然后将接收和差波束幅度值相比得到差比和的数值,利用此数值查找对应鉴角曲线,最终得到目标所在的波束偏角角度。
雷达天线

雷达天线雷达用来辐射和接收电磁波并决定其探测方向的设备。
雷达在发射时须把能量集中辐射到需要照射的方向;而在接收时又尽可能只接收探测方向的回波,同时分辨出目标的方位和仰角,或二者之一。
雷达测量目标位置的三个坐标(方位、仰角和距离)中,有两个坐标(方位和仰角)的测量与天线的性能直接有关。
因此,天线性能对于雷达设备比对于其他电子设备(如通信设备等)更为重要。
主要参量雷达天线的主要参量有方向图、增益和有效面积。
方向图雷达天线具有一定形状的波束。
由于波束是立体的,常用水平截面的波束形状(即水平方向图)和垂直截面的波束形状(即垂直方向图)描述。
方向图呈花瓣状,故又称波瓣图(图1)。
常规方向图只有一个主瓣和多个副瓣。
副瓣电平通常低于主瓣20分贝以上,这样才可能用主瓣来分辨目标的方位和仰角。
主瓣半功率点(0.707场强点)间的宽度称为波束宽度。
增益雷达天线在最大辐射方向所辐射的功率与一假想的各向均匀辐射的天线在同一方向辐射的功率之比(其条件为两天线输入的功率相同)。
增益G 表示雷达天线在发射时聚束的能力。
有效面积雷达天线接收到的信号功率与来自最大辐射方向的信号的功率密度之比,即天线接收到的信号功率Pr=S×Ae。
式中S为信号功率密度;Ae为天线有效面积,表示雷达天线在接收时捕获空中信号的能力。
由互易定理可证明G=4πAe/λ2,式中λ为信号波长。
对一定形式的天线,天线有效面积Ae与实际几何面积A 成正比,即Ae=ηA。
式中η为利用系数,一般小于1。
雷达天线设计的主要问题是:①提高天线增益和有效面积,以加大雷达探测距离;②压低天线副瓣电平,以减小测向模糊和提高抗干扰能力;③提高波束扫描速率,以便能同时观察多个目标;④展宽天线系统工作频带,以提高反有源干扰的能力;⑤采用多种技术提高测角精度。
搜索雷达天线搜索雷达又称警戒雷达,用于及时发现远距离目标。
搜索雷达天线相当大,面积一般为数十至数百平方米。
探测距离达几千公里的预警雷达的天线面积可达几千或几万平方米。
跟踪接收机的理论分析与方案设计

20嘶年空间电子学学术年会论文集
2.1单通道单脉冲的合成
角跟踪接收机采用单通道时,和,差信号必须以适当的方式台成,目的是合成后的信号能在终 端解调出角误差信号信息.通常在和,差信号台成前,先对差信号进行四相调制,再与和信号合成. 和,差信号分别经过低噪声放大Kz,K△后为
£,=K∑Am
cos
cot
0
矗
毛
图2
毛
气 四相Q?sK相位调制信号
10,tΒιβλιοθήκη f0~fI廊,=‰,置:笔
137r/2,t=t3~t4
调制后的差信号经一定向耦合器与和信号 合成,其合成信号为:
∽
uAt)=如如COSO/+√肘缸句心4,tCOS缸一伊+觑f)+∞
式中M为定向耦合器的系数.一般取8~12dB.
(8)
2.2合成信号的解调
关键词:跟踪接收机单脉冲单通道角误差信号提取系统软硬件实现
1引言
目前,用户天线实现对空间目标的跟踪大体可以分为三种方式.一种是地面指令控制跟踪,也 叫手动跟踪,利用地面指令实时控制天线消除目标角度的偏差;第二种是程序跟踪,也叫程控指向, 利用空间目标理论出现的轨迹引导天线捕获目标:第三种为自动跟踪,设备自身产生响应的角度误 差信号,通过一套闭环伺服系统控制天线自动跟踪目标.在自动跟踪系统中,根据角误差信号形成 的方式不同,又可分为步进跟踪体制,圆锥扫描体制和单脉冲跟踪体制. 步进体制是~种低精度的简单跟踪系统,利用步进主反射面获得角误差信号,一般仅用在小型 地面站,地球同步静止卫星的接收站和测量船上. 圆锥扫描体制是一种早期常用的雷达自动角跟踪体制,利用顺序产生的测向波束产生幅度调制 的包含误差信息的信号,它的特点是对幅度干扰敏感.另外,天线馈源系统需要机械运动,结构比 较复杂,馈源的机槭运动导致天线的动态响应不快,其跟踪精度不是很高. 单脉冲跟踪体制是一种同时波瓣转换系统,能在一个脉冲内确定目标的方位误差和俯仰误差, 最早用于军用的警戒脉冲雷达,后用于连续波雷达中.根据不同的测量原理,单脉冲跟踪又可以分 为相位比较和振幅比较两种方式.相位比较单脉冲跟踪系统的缺点是,定向精度和接收机支路的相 位特性的一致性有很大的依赖关系.与此相反幅度比较单脉冲克服了这个缺点,它对接收机支路特 性的不一致性要求不是很严格.根据馈源的形式不同,幅度比较单脉冲跟踪系统又可分为多喇叭方 式和多次模方式.在多数测控站采用的单脉冲方式跟踪中,多喇叭方式和多次模方式在现代测控系 统中都得到了广泛的应用. 多喇叭自跟踪和多次模自跟踪都属于零值跟踪.其基本原理是利用差信号电场方向图在天线轴 为零值而在偏轴角度上又有极性的特点实现自跟踪.多次模自跟踪也叫差模跟踪,它和多喇叭自跟 踪有相同点,也有不同点.其相同点是:两者都有和信号方向图和差信号方向图,两者都是零值跟 踪,且偏轴后场方向图具有极性.两者的不同点是:多喇叭自跟踪的差方向图是通过配置外围喇叭 (五喇叭)和喇叭分割(四喇叭)来实现的,而差模自跟踪是利用波导模式的方向图来实现的,差 模输出的差路信号中已经包含方位误差和俯仰误差.因此.多喇叭自跟踪和多次模自跟踪理论分析, 工程应用的理论基础是完全相同的. 常用的几种多次模跟踪方式有: ≯TE.模为和模,TMo.模为差模的两模自跟踪方式. 》TE.,模为和模,TMo.,TEo.模为差模的三模自跟踪方式.
阵列通道噪声不一致性校正方法

阵列通道噪声不一致性校正方法张广宇;王克让;王笃祥;李娟慧【摘要】以提高阵列系统波束合成信噪比为目标,提出一种基于噪声测量的通道噪声不一致校正方法,建立了通道噪声不一致校正的系统模型.从理论上证明了经此方法校正的波束合成信噪比优于传统幅度校正方法,给出了噪声不一致校正的步骤.此方法无需额外信号输入,可瞬时校正带宽,实现简单.仿真结果表明了此方法的优越性.【期刊名称】《航天电子对抗》【年(卷),期】2015(031)002【总页数】3页(P42-44)【关键词】波束形成;幅度误差;接收通道校准【作者】张广宇;王克让;王笃祥;李娟慧【作者单位】中国航天科工集团8511所,江苏南京210007;中国航天科工集团8511所,江苏南京210007;中国航天科工集团8511所,江苏南京210007;中国航天科工集团8511所,江苏南京210007【正文语种】中文【中图分类】TN911.7传感器在空间位置的不同会引入波程差,导致了相位差,波束形成技术通过对此相位差进行补偿,实现各接收通道信号之间同相叠加,使得在特定方向最大信噪比(SNR)接收[1],在声纳、雷达、通信等领域得到了广泛应用。
不过波束形成技术对阵列系统的幅相误差比较敏感,虽然工程设计人员尽力从硬件设计、电路制造和机械加工上保证各通道的一致性,但是由各通道中放大器、滤波器、衰减器、电缆等模拟器件电路特性的不一致带来的通道间幅相误差仍不可避免,其对系统合成增益、波束指向、零陷深度等会产生较大影响[2-3]。
通道的幅度误差与相位误差的测量校准是相互独立的两个过程,二者可以同时校正也可分开校正。
现有的幅度误差校正方法,一般认为通道的幅度误差主要来源于接收通道增益的不一致,因此常规校正都是从外部输入已知或者未知的信号,对经过通道后的信号进行处理得到幅度误差[4]。
但是实际阵列系统中,除通道增益不一致外,各个通道噪声系数也不一致,最终导致各个通道的噪声能量并不一致,并且这种不一致与信号增益的不一致存在一定差异。
某单脉冲雷达多路径仰角跟踪误差建模与计算

2 0 0 7
第 1 卷 第 1 8 期
Vo _ 8 NO 1 I1 .
某 单脉 冲 雷达 多路 径 仰 角跟 踪 误 差 建 模 与 计 算
刘 继 东 , 吴 金 亮 孙 书 恩 ,
(. 防科 技 大 学 电 子 科 学 与 工 程 学 院 , 1国 湖南 长 沙 40 7 ; 2 6 8 5部 队 ) 1 03 . 3 9
维普资讯
2 7正 00
2月
装 备 指 挥 技 术 学 院 学 报
J u n l fte Ae d myo q ime tCo o r a h a e fE up n mma d & Te h oo y o n c n lg
F b ur e ray
Ab ta t To i r v h r c i g p e ii n o o a g e r d r i i e e s r o c n i e — sr c : mp o e t e t a k n r c so f l w— n l a a ,t s n c s a y t o s d r mU
a ngls i i c s d. e S d s us e Key wo ds:m o opu s a r r n l e r da ;muli t tpa h;l w— gl r c i g o an e t a k n
当跟踪 雷达 低 仰 角 跟 踪 目标 时 , 于雷 达 波 由
tp t fe tc us d by r fe ton oft a t u f c .A o i a h e f c a e e l c i he e r h s r a e c mplt i ulto de o a ge r c i e e sm a i n mo lf r t r tt a k ng o no f a mo pule r da h twor s a ow l v to ngls wih g ou e lc i n muli a h i i e s a rt a k tl ee ain a e t r nd r fe to tp t s g v n. I t i l de uhi t e m e r o l r d r a e a mod la r c i g e r r mo 1 Ar ii ilt s i g ncu sm pa h g o t y m de , a a nt nn e nd t a k n r o de. tfca e tn
毫米波单脉冲测角中幅相不一致的影响及补偿

Ke r Ampl u e a h s n o it n y MMW Mo o ule y wo ds i d nd p a e i c nsse c t n p s
1 引 言
在众 多 的测 角方 法 中 , 比幅单 脉 冲测 角 系 统 以 其测 角精 度 高 、 用距 离远 、 数据 率 高及抗 干 扰性 作 角
21 0 1年 2月
宇航 计 测 技 术
Ju n lo to a t too y a d Me sr me t o ra fAs n ui Merlg n au e n. 131. .1 No
第 3卷 1
第 1 期
文 章 编 号 :0 0— 2 2 2 1 )0 0 0 0 10 7 0 ( 0 1 1— 0 1— 6
L U n -i DONG he ・ o M EI Gu n ・o g HUANG o g I Ya g-n l S ng- b a g- n z H n
( e igIs tt o e t S n i q im n ,B in 0 8 4 B i n tue f mo e s g E up e t e ig1 0 5 ) j ni R e n j
m o o u s n l a u e e n wo me h dso nge e r r e ta to . Afe h t t f c fa pi n p le a ge me s r m nta d t t o fa l ro x r ci n t rt a , he ef to m l— e t d n ha e i c nsse c n a ge m e s r m e s dic s e u e a d p s n o it n y o n l a u e nti s u s d, a d s me c m p ns to eh d r n o o e ai n m t o s a e
《雷达成像原理》课件

05
雷达成像技术发展与展望
雷达成像技术的发展历程
雷达成像技术的起源
20世纪40年代,雷达技术开始应用于军事 领域,随着技术的发展,人们开始探索雷达 在成像方面的应用。
雷达成像技术的初步发展
20世纪60年代,随着计算机技术和信号处理技术的 发展,雷达成像技术开始进入初步发展阶段,出现 了多种成像模式。
提取雷达图像中的边 缘信息,用于目标识
别和形状分析。
纹理分析
提取雷达图像中的纹 理特征,用于分类和 识别不同的物质或结
构。
04
雷达图像解译
雷达图像的解译方法
直接解译法
01
根据雷达图像的直接特征,如斑点、纹理、色彩等,对目标进
行识别和分类。
间接解译法
02
利用雷达图像的间接特征,如地形、地貌、阴影等,结合地理
03
雷达图像处理
雷达图像预处理
去噪
去除雷达图像中的噪声,提高图像质量。
标定
对雷达图像进行几何校正和辐射校正,以 消除误差。
配准
将多幅雷达图像进行对齐,确保后续处理 的一致性。
滤波
平滑雷达图像,减少随机噪声和斑点效应 。
雷达图像增强
01 对比度增强
提高雷达图像的对比度, 使其更易于观察和理解。
03 直方图均衡化
雷达成像技术的成熟
20世纪80年代以后,随着数字信号处理技 术的广泛应用,雷达成像技术逐渐成熟,分 辨率和成像质量得到显著提高。
雷达成像技术的未来展望
高分辨率成像技术
未来雷达成像技术将进一步提高分辨率,实现更精细的成像效果 ,为各种应用提供更准确的信息。
多模式成像技术
未来雷达成像技术将发展多种模式,包括透射、反射、合成孔径等 多种模式,以满足不同场景的需求。