05假肢膝关节机构
假肢膝关节机构课程设计

假肢膝关节机构课程设计一、课程目标知识目标:1. 学生能理解假肢膝关节的基本结构及其工作原理;2. 学生能掌握假肢膝关节关键零部件的作用及其相互关系;3. 学生能了解假肢膝关节在不同运动状态下的力学特性。
技能目标:1. 学生能运用所学知识,分析假肢膝关节的优缺点,并提出改进方案;2. 学生能通过小组合作,设计并制作一个简单的假肢膝关节模型;3. 学生能运用所学知识,解释现实生活中的假肢膝关节应用案例。
情感态度价值观目标:1. 学生对假肢膝关节技术的发展及应用产生浓厚兴趣,培养科技创新意识;2. 学生在小组合作中,学会尊重他人意见,培养团队合作精神;3. 学生通过了解假肢膝关节在康复领域的应用,增强关爱弱势群体的意识。
课程性质:本课程为科技制作与实践课程,结合学科知识,注重培养学生的动手能力、创新意识和团队合作精神。
学生特点:学生处于八年级,具备一定的物理知识和动手能力,对新鲜事物充满好奇心,善于合作与分享。
教学要求:教师需注重理论与实践相结合,引导学生通过动手实践,掌握假肢膝关节的基本原理和制作方法,提高学生的科技创新能力和实践能力。
同时,关注学生的情感态度价值观培养,使学生在课程学习中得到全面发展。
二、教学内容1. 假肢膝关节基础知识:- 膝关节的结构与功能;- 假肢膝关节的分类及工作原理;- 假肢膝关节关键零部件介绍。
2. 假肢膝关节的设计与制作:- 设计原则与方法;- 制作工艺及流程;- 模型调试与优化。
3. 假肢膝关节的应用案例:- 现实生活中的应用实例;- 假肢膝关节在康复领域的意义;- 国内外假肢膝关节技术的发展动态。
教学大纲安排:第一课时:假肢膝关节基础知识学习,介绍膝关节的结构与功能,假肢膝关节的分类及工作原理,让学生对假肢膝关节有初步的了解。
第二课时:假肢膝关节关键零部件学习,分析各零部件的作用及其相互关系,为后续设计与制作奠定基础。
第三课时:假肢膝关节设计与制作,引导学生学习设计原则与方法,分组进行模型制作,培养学生的动手能力。
含半月板的假肢膝关节机构设计与减震性能分析
含半月板的假肢膝关节机构设计与减震性能分析
李飞1,张芙铭1” 丁若修1”谢华龙2
[摘要】摘要:智能仿生腿是一种能够最大限度模仿人体健康腿运动的高级智能下肢假肢。
当假肢穿戴者从事跑步、打网球等复杂运动时,运动对假肢关节的冲击和震动将大幅增加。
为提高假肢抗冲击、露动性能,将人体膝关节半月板结构引入假肢膝关节。
分析了人体膝关节的解剖结构和功能,进行了智能仿生腿膝关节机械机构设计,基于ANSYS对假肢膝关节半月板结构的抗冲击、震动性能进行了有限元分析。
结果表明:半月板具有承载负荷的能力并具有缓冲吸黑作用。
【期刊名称】机械设计与制造
【年(卷),期】2016(000)001
【总页数】4
【关键词】智能仿生腿;膝关节;半月板;有限元分析
1引言
由于疾病、天灾、战争、交通事故和人为伤害等,目前社会上已出现越来越多的肢体残疾患者。
特别是近几年,下肢残疾患者的数量增加尤为迅速。
1987年, 我国进行了第一次全国残疾人调查Z统计得到肢体残疾的患者约为755万,而2006年调查得到的肢体残疾的患者约为2412万,在20年间肢残者人数的增幅高达219.47%o由于目前医疗技术有限,无法实现肢体再生,假肢便成为代替真实肢体实现下肢残疾人行走功能的唯一方式[1]。
智能仿生腿是一种高级智能下肢假肢[2],具有良好的运动拟人特性和可靠性,可以帮助残疾人完成行走, 上下楼梯等基本功能,其研究具有重要的社会意义及经济效益。
机构运动简图测绘与分析实验
实验一机构运动简图测绘与分析实验一、实验目的1.根据机构模型,掌握正确绘制平面机构运动简图的方法和技能。
2.验证和巩固机构自由度的计算,进一步理解机构自由度的概念。
3.应用机构自由度的计算方法,分析平面机构运动的确定性。
4.掌握平面机构的组成原理,能够对平面机构进行结构分析。
二、实验设备1、机构模型(铆钉机构B1、简易冲床B2、装订机机构B3、鄂式破碎机B4、步进输送机B5、假肢膝关节机构B6、机械手腕部机构B7、抛光机B8、牛头刨床B9、制动机构B10等);2.所用工具:钢板尺、游标卡尺、三角板、铅笔、圆规、橡皮、纸(除钢板尺和游标卡尺外,其余学生自备)。
三、实验内容1. 选择5种机构模型进行测量,绘制机构运动简图;2. 计算机构自由度,并注明其活动构件数、低副数、高副数,然后代入公式进行计算。
3.对所选择的机构进行结构分析,确定机构的级别。
四、实验原理、方法和手段在对现有机械设备进行分析或设计新的机械设备时,都需要运用其机构运动简图。
而机构各部分的运动是由其原动件的运动规律、该机构中各运动副的数目、类型,运动副相对位置和构件的数目来确定的,而与构件的外形、断面尺寸、组成构件的零件数目及运动副的具体构造等无关。
所以,只要根据机构的运动尺寸,按一定的比例尺定出各运动副的位置,就可以用运动副的代表符号和简单的线条把机构的运动简图画出来。
常用符号见下表:1、机构运动简图的概念抛开构件的复杂外形和运动副的具体结构,利用简单的线条和规定的符号来代表每一个构件和运动副,并按一定的比例将机构的运动特征表达出来的简单图形称为机构运动简图。
机构运动简图与原机构具有完全相同的运动特性,因而可以根据该图对机构进行运动分析和动力分析。
2、测绘方法(1)分析运动情况。
绘制机构运动简图时,首先要把该机器或模型的实际构造和运动情况搞清楚。
为此,先应确定出原动件和从动件,再使被测机器或模型缓慢运动,然后按照运动的传递路线,把原动件和从动件之间的各构件的运动情况观察清楚,尤其应注意有微小运动的构件,分清各构件间的接触情况及相对运动的性质,从而确定组成机构的运动构件数目、联接次序和运动副数目、种类等。
机械原理答案重点(课后习题)
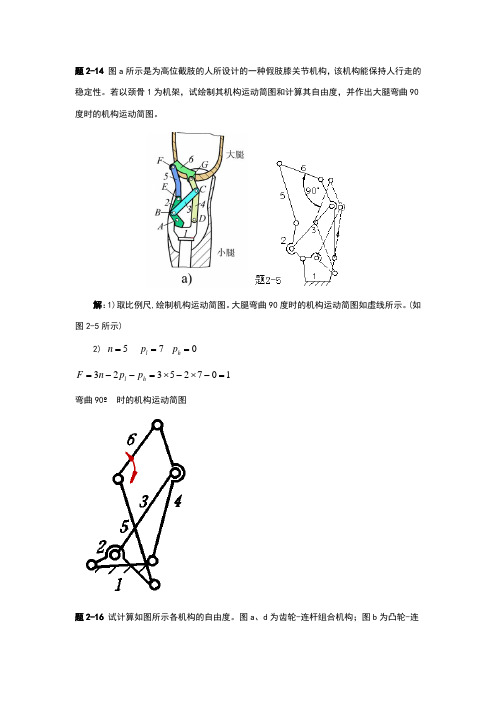
题2-14 图a 所示是为高位截肢的人所设计的一种假肢膝关节机构,该机构能保持人行走的稳定性。
若以颈骨1为机架,试绘制其机构运动简图和计算其自由度,并作出大腿弯曲90度时的机构运动简图。
解:1)取比例尺,绘制机构运动简图。
大腿弯曲90度时的机构运动简图如虚线所示。
(如图2-5所示)2) 5=n 7=l p 0=h p10725323=-⨯-⨯=--=h l p p n F弯曲90º 时的机构运动简图题2-16 试计算如图所示各机构的自由度。
图a 、d 为齿轮-连杆组合机构;图b 为凸轮-连杆组合机构(图中在D 处为铰接在一起的两个滑块);图c 为一精压机机构。
并问在图d 所示机构中,齿轮3与5和齿条7与齿轮5的啮合高副所提供的约束数目是否相同为什么解: a) 4=n 5=l p 1=h p11524323=-⨯-⨯=--=h l p p n F A 处为复合铰链b) 解法一:5=n 6=l p 2=h p12625323=-⨯-⨯=--=h l p p n F解法二:7=n 8=l p 2=h p 虚约束0='p 局部自由度 2='F12)0282(73)2(3=--+⨯-⨯='-'-+-=F p p p n F h l 2、4处存在局部自由度c) 解法一:5=n 7=l p 0=h p10725323=-⨯-⨯=--=h l p p n F解法二:11=n 17=l p 0=h p虚约束263010232=⨯-+⨯='-'+'='n p p p hl 局部自由度 0='F 10)20172(113)2(3=--+⨯-⨯='-'-+-=F p p p n F h l C 、F 、K 处存在复合铰链d) 6=n 7=l p 3=h p13726323=-⨯-⨯=--=h l p p n F齿轮3与齿轮5的啮合为高副(因两齿轮中心距己被约束,故应为单侧接触)将提供1个约束。
第二章-假肢技术(第二节-下肢假肢)
承载力强,适合更高级别运动 凝胶、硅胶内衬套对残肢有多种保护作用 缺点: 有些患者对于硅胶、凝胶套过敏
★目前正在推广应用
硅胶、凝胶内衬套
凝胶套
接受腔
硅胶套接受腔
膝离断假肢
经股骨髁截ห้องสมุดไป่ตู้者 末端有良好承重功能,选配 同膝离断假肢 末端无良好承重功能,选配 坐骨承重的大腿假肢
力线位于关节 轴线前侧,靠 重力使摩擦面 压紧阻止相对 运动
转动中心随 利用气压
膝关节屈伸 阻尼方式
角度实现大 实现膝关
范围的上下、 节摆动期
前后移动
的控制
优点
运动灵; 锁膝后, 非常稳定
在安全范围内 稳定性高;灵 活性好
安全范围宽; 随意调整
步态好;屈 阻尼,控
曲时,小腿 制运动速
的有效长度 度,改善
临时假肢通常指术后早期假肢。
术后即装假肢(IPPF)
术后早期假肢(EPPF)
正式假肢
• 残肢定型后安装 的假肢为长期假 肢,又称为正式 假肢。
• 截肢后810周 即可安装。
按驱动力源划分
自身力源假肢
• 又称内动力假肢 • 如索控式肘离断假肢
外部力源假肢
又称外动力假肢 如肌电式前臂假肢
混合力源假肢
弹簧气压液压等气压控制气压控制液压控制液压控制电脑控制电脑控制弹簧控制弹簧控制几种膝关节优缺点对照表几种膝关节优缺点对照表单轴承重自锁单轴承重自锁四连杆四连杆气压控制气压控制液压控制液压控制电子遥控电子遥控智能控制智能控制控制控制方式方式膝关节设膝关节设位于关节位于关节轴线前侧轴线前侧力线位于关节力线位于关节轴线前侧靠轴线前侧靠重力使摩擦面重力使摩擦面压紧阻止相对压紧阻止相对运动运动转动中心随转动中心随膝关节屈伸膝关节屈伸角度实现大角度实现大范围的上下范围的上下前后移动前后移动利用气压利用气压阻尼方式阻尼方式实现膝关实现膝关节摆动期节摆动期的控制的控制利用液压利用液压阻尼方式阻尼方式实现膝关实现膝关节摆动期节摆动期的控制的控制利用电子利用电子遥控方式遥控方式实现膝关实现膝关节摆动期节摆动期的控制的控制利用计算利用计算机方式实机方式实现膝关节现膝关节摆动期的摆动期的控制控制优点优点运动灵
含半月板的假肢膝关节机构设计与减震性能分析

含半月板的假肢膝关节机构设计与减震性能分析李飞;张芙铭;丁若修;谢华龙【摘要】智能仿生腿是一种能够最大限度模仿人体健康腿运动的高级智能下肢假肢.当假肢穿戴者从事跑步、打网球等复杂运动时,运动对假肢关节的冲击和震动将大幅增加.为提高假肢抗冲击、震动性能,将人体膝关节半月板结构引入假肢膝关节.分析了人体膝关节的解剖结构和功能,进行了智能仿生腿膝关节机械机构设计,基于ANSYS对假肢膝关节半月板结构的抗冲击、震动性能进行了有限元分析.结果表明:半月板具有承载负荷的能力并具有缓冲吸震作用.【期刊名称】《机械设计与制造》【年(卷),期】2016(000)001【总页数】4页(P161-164)【关键词】智能仿生腿;膝关节;半月板;有限元分析【作者】李飞;张芙铭;丁若修;谢华龙【作者单位】沈阳工业大学信息科学与工程学院,辽宁沈阳110870;沈阳工业大学信息科学与工程学院,辽宁沈阳110870;沈阳工业大学信息科学与工程学院,辽宁沈阳110870;东北大学机械工程与自动化学院,辽宁沈阳110004【正文语种】中文【中图分类】TH16由于疾病、天灾、战争、交通事故和人为伤害等,目前社会上已出现越来越多的肢体残疾患者。
特别是近几年,下肢残疾患者的数量增加尤为迅速。
1987年,我国进行了第一次全国残疾人调查,统计得到肢体残疾的患者约为755万,而2006年调查得到的肢体残疾的患者约为2412万,在20年间肢残者人数的增幅高达219.47%。
由于目前医疗技术有限,无法实现肢体再生,假肢便成为代替真实肢体实现下肢残疾人行走功能的唯一方式[1]。
智能仿生腿是一种高级智能下肢假肢[2],具有良好的运动拟人特性和可靠性,可以帮助残疾人完成行走,上下楼梯等基本功能,其研究具有重要的社会意义及经济效益。
随着生活水平的提高,下肢残疾者希望能够实现跑步、打网球等复杂运动的功能。
然而当假肢穿戴者从事此类运动时,运动对假肢关节的冲击和震动将大幅增加。
假肢概述
装饰部件
海棉 装饰袜
假肢的受力
拉力 压力
扭力
旋转力
剪切力
四、假肢的分类
按照截肢部位 按照装配时间 按照结构形式 按照使用目的
1、按照截肢部位
上肢 装饰手指,部分手装饰套、装饰性假手、前 臂假肢、肘离断假肢、上臂假肢、肩关节离 断假肢、肩胛胸廓截肢假肢 下肢 部分足假肢,赛姆假肢,小腿假肢、膝离断假 肢、大腿假肢、髋离断假肢、半骨盆假肢
安装假肢对截肢部位的要求
① 残肢应有适当的长度,残端应有适度的软组织复盖,避免圆锥形残端, 保证有足够的杠杆和良好的肌肉控制力量; ② 残肢关节应尽可能保留原有的生理功能,无挛缩畸形; ③ 残端不应有压痛、骨刺、神经瘤; ④ 残肢要有良好皮肤条件,健康平整,无疤痕粘连,无窦道溃疡。
3、按照结构形式
壳式假肢 骨骼式假肢
壳式假肢
假肢的结构类似甲壳类昆虫肢体结构,用壳体承受肢 体的重量,且壳的外形制成人体肢体的形状。
优点:用最小的重量达到很大的强度 外壳强度好 耐用性好 便于维护和保养 缺点:调整困难 手感差
骨骼式假肢
也称为内骨骼式假肢,组件式假肢
优点:可任意选择适合患者的各种部件, 从而使患者达到最佳状态 便于调整 可缩短制作修理时间 外观能得到改善 缺点:价格高 耐用性 装饰套易破损
病人
抑郁
心理状态
焦虑 自卑自悲 具有攻击和敌意
生理状态
肢体缺失 影响站立、坐下、以及 日常生活起居 影响到身体的其他部位
残肢
截肢手术做得如何? 适合安装假肢么?
通过接受腔的功能 来考虑!
假肢技术
石膏技术 组装对线 试样技术