ETAS 硬件在环测试系统(LABCAR)
发动机线控驱动技术的功能安全设计与研究
发动机线控驱动技术的功能安全设计与研究熊建; 顾宏【期刊名称】《《摩托车技术》》【年(卷),期】2019(000)011【总页数】8页(P36-43)【关键词】发动机控制; 线控技术; 摩托车; 功能安全; HIL测试【作者】熊建; 顾宏【作者单位】大连理工大学【正文语种】中文线控技术(X-by-Wire)源于飞机控制系统,飞机的新型飞行控制系统是一种线控系统(Fly-by-Wire),它将飞机驾驶员的操纵命令转换成电信号,利用计算机控制飞机飞行。
这种控制方式引入到汽车驾驶上,就是将驾驶员的操作动作经过传感器转变成电信号,通过电信号网络传输到攻率放大再推动执行机构。
其实质就是在需要有机构动作的地方不是应用液压系统来传递操纵动作,而是利用弱电信号再控制强电执行机构来完成。
线控(电控)系统中弱电信号早期用模拟信号较多,目前多用数字信号。
典型的有线控驱动(Drive By Wire)线控转向(Steer-by-Wire)、线控制动(Brake-by-Wire)等。
DBW 的英文全称是也可以称作Throttle By Wire,也即“线控油门”或者“电控油门”。
线控油门系统主要由油门踏板、踏板位移传感器、电控单元ECU、燃油喷射系统等执行机构组成。
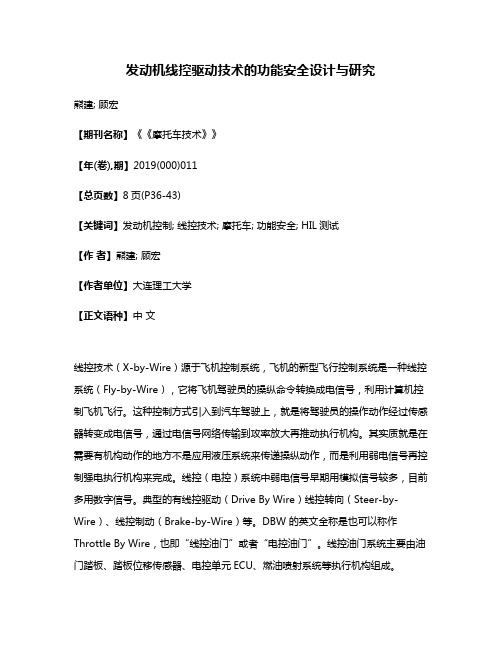
传统的油门控制方式是驾驶员通过踩油门踏板,由油门拉索直接控制发动机油门的开合程度,从而决定加速或减速,驾驶员的动作与油门动作之间是通过拉索的机械作用联系的如图1(a)所示。
图1(b)线控驱动的示意图,将机械联系改为电信号进行联系。
文献[1-9]提出了电控发动机对驾驶员意图请求,发动机控制单元的软硬件设计及其相关的控制策略,其中,驾驶员仍然通过踩油门踏板控制拉索,但拉索并不是直接连接到油门,而是连着一个油门踏板位置传感器,传感器将拉索的位置变化转化为电信号传送至汽车的大脑ECU(电子控制器),ECU 将收集到的相关传感器信号经过处理后发送命令至执行机构比如节气门,喷油器,或者喷油泵之类的执行驱动控制模块。
基于Labcar的ABS控制器HIL测试
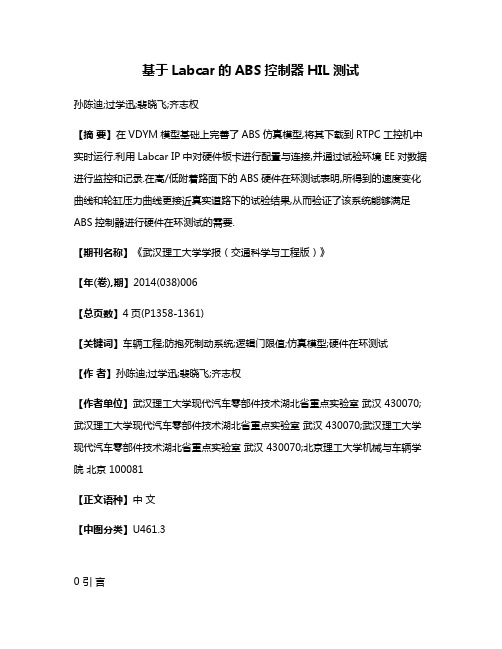
基于Labcar的ABS控制器HIL测试孙陈迪;过学迅;裴晓飞;齐志权【摘要】在VDYM模型基础上完善了ABS仿真模型,将其下载到RTPC工控机中实时运行.利用Labcar IP中对硬件板卡进行配置与连接,并通过试验环境EE对数据进行监控和记录.在高/低附着路面下的ABS硬件在环测试表明,所得到的速度变化曲线和轮缸压力曲线更接近真实道路下的试验结果,从而验证了该系统能够满足ABS控制器进行硬件在环测试的需要.【期刊名称】《武汉理工大学学报(交通科学与工程版)》【年(卷),期】2014(038)006【总页数】4页(P1358-1361)【关键词】车辆工程;防抱死制动系统;逻辑门限值;仿真模型;硬件在环测试【作者】孙陈迪;过学迅;裴晓飞;齐志权【作者单位】武汉理工大学现代汽车零部件技术湖北省重点实验室武汉 430070;武汉理工大学现代汽车零部件技术湖北省重点实验室武汉 430070;武汉理工大学现代汽车零部件技术湖北省重点实验室武汉 430070;北京理工大学机械与车辆学院北京 100081【正文语种】中文【中图分类】U461.30 引言现代汽车电子控制系统(ECU)的开发中广泛采用了“V 模式”流程[1].该流程主要分为5个环节:离线功能设计、快速控制原型(RCP)、目标代码生成、硬件在环(HIL)、标定与匹配.其中,HIL测试是“V 模式”开发流程中验证ECU核心功能的重要环节[2-4].目前市场上主流的硬件在环仿真系统包括dspace,ETASLabcar,Matlab xPC和Labview RT 等.相较而言,在ETAS Labcar的仿真工控机(RTPC)中运行Linux实时操作系统,基于Ethernet网络的分布式架构,通过对板卡的灵活配置可满足不同被测系统的需求[5-6].由于Labcar的轮速板卡ES1337 可以模拟各种类型的轮速信号,特别适合用于ABS/ESP 系统的硬件在环测试[7].汽车防抱死制动系统(ABS)作为一种成熟电控产品,已经在各类汽车上得到广泛应用.目前ABS ECU 一般采用逻辑门限值算法,根据车轮加减速度和参考滑移率作为门限值进行增压,减压和保压调节,使得车轮滑移率在最优值附近波动[8].因此,ABS ECU 的性能与车辆动力学模型、轮胎模型、道路环境以及制动系统等因素密切相关[9-10].本文主要针对基于逻辑门限值的ABS控制器进行硬件在环测试.首先建立了HIL 的测试体系,介绍了Labcar的软硬件平台.在VDYM 人-车-路模型的基础上,完善了HIL 测试所需的ABS仿真模型.最后联立液压制动台架,对ABS ECU 进行了高/低附着路面下性能验证.通过HIL测试,可以方便的对控制算法和模型参数进行及时的修改以达到最佳控制效果.1 ABS硬件在环体系基于Labcar软硬件平台建立的ABS硬件在环仿真系统如图1所示,包括Labcar PC,RTPC、硬件板卡、ABS ECU 和液压制动系统5个部分.系统工作流程如下:在Labcar PC的IP软件中新建项目文件,并对硬件板卡进行配置.待添加ABS仿真模型后,连接模型中的输入输出模块与板卡,经过编译通过Ethernet网下载到RTPC中.RTPC不仅通过相关板卡接收来自液压制动系统的轮缸压力信号,并且将模型实时计算得到的轮速信息,通过相关板卡输送给ABS ECU .而ABS ECU 则通过电磁阀和电机的动作指令调节轮缸的制动压力.在HIL 测试中,实验人员可利用EE 软件全程监控和数据记录,并对模型参数进行修改.图1 硬件在环测试系统2 VDYM 模型剪裁在ABS HIL 测试中,仿真模型的精度直接决定了测试结果的有效性.如果模型过于简单,则无法反映车辆动力学的真实特性;模型过于复杂则会影响其计算速度,仿真结果也较难收敛.VDYM 模型是ETAS公司专为博世ABS/ESP控制器所开发的Matlab/Simulink 模型,能较好的满足仿真实时性和精确性的要求.根据ABS HIL测试体系的要求,对该模型进行适当剪裁.2.1 驾驶员模型在驾驶员模型中,可以依据驾驶员的意愿进行转向、离合、换挡、加速、制动及设定巡航车速等一系列操作.在对车辆的横向控制中,主要是通过改变方向盘的转向角度来实现的;而纵向控制中,需要设定驾驶员的期望车速.在VDYM 模型中,上述两个参数分别用DriverStimSteeringWheel-Angle和U_TargetSpeedStim 来表征,并且均可在用户界面EE中以图形化的方式直接修改具体数值.在ABS试验中,可将方向盘转角设置为0,即车辆保持直线行驶;而目标车速则可根据ABS 制动时的初始车速进行设置,本试验中设为110 km/h.2.2 道路模型道路模型需要尽可能真实的还原车辆行驶环境.在VDYM 模型中,不仅可以选择道路的类型,如直道、环形道路、双移线道路等,还能方便的设置路面附着系数.通过修改变量my_LF,my_LR,my_RF和my_RR 的数值,能够独立的表征各个车轮所处的路面附着系数,因此可以灵活的将路面类型配置成高/低附着,对开/对接等多种形式.在本试验中,需要通过StimLane将路径类型设定为直道;而对于高附着路面和低附着路面,附着系数分别设为0.7和0.3.2.3 车辆模型VDYM 的车辆模型由发动机模型、动力传动模型、制动模型以及车辆动力学模型四部分组成.由于本试验主要考虑的是制动工况,并且采用了真实的液压制动系统,因此这里重点针对车辆动力学模型进行剪裁.首先断开车辆动力学模型与制动模型之间的连接,通过Input_LF,Input_RF,Input_LR,Input_RR 直接将采集到的4 路轮缸压力大小,换算成制动力矩输入到车辆动力学模型中.同样,模型计算得到的4路轮速数值Veh_v_Wheel_LF,Veh_v_Wheel_RF,Veh_v_Wheel_LR,Veh_v_Wheel_RR,通过轮速模拟板卡ES1337输送给ABS ECU,从而将ABS ECU、VDYM 模型与液压制动系统构成闭环控制系统.3 ABS液压制动台架在实际应用中,通过纯数值仿真方法设计出的控制器在系统实时控制中可能得不到期望的控制效果,这是因为在纯数值仿真中忽略了实际系统的某些特性或参数.同样对于汽车制动系统,由于存在强非线性和滞后性,很难准确的建立起系统的数学模型,仅仅把数学模型作为实际对象的近似表示,拟合的结果往往不能满足实际要求.因此,这里采用ABS控制器和制动系统实物来替代VDYM 中的部分虚拟模型,从而构建HIL 测试所需的闭环控制系统.在ABS逻辑门限值方法中,有三个重要的组成部分,即路面识别模块、参考车速估计模块和门限值(车轮减速度/滑移率)标定模块.基于HIL控制架构,可以非常方便的对每个算法模块或其组合进行验证,见图2.图2 ABS控制器开发流程为了加快ABS控制器的开发进度,开始时直接使用VDYM 模型中的车轮滑移率,从而专注于对滑移率门限值的标定.待不同路面条件下的逻辑门限值确定后,再将Labcar的轮速模拟板卡提供的四路轮速引入,将所估计的参考车速与车辆模型提供的车速进行对比验证.在此基础上加入路面识别环节,并用模型中所设置的路面类型对其算法进行修正.这样从最小闭环控制起,通过对各个模块的算法累加,即能最终完成ABS控制器的开发.由于路面模型无法模拟路面的垂向颠簸度,因此与实际ABS控制器相比,唯一不同的是无法设计车辆过沟/过坎工况的算法补偿. 图3给出了ABS液压制动台架.压力调节器采用大陆MK60 HCU,并将12个电磁阀和电机的控制线引出与ABS控制器的驱动电路相连.制动轮缸采用迈腾原车的前后盘式制动器,并在轮缸入口加装了压力传感器,将测得的压力信号反馈到RTPC 的仿真模型中.与传统ABS 液压制动台架稍有不同的是,这里取消了电子真空助力器,而是直接使用电机泵油来主动建压.一旦通过EE的GUI界面使能ABS控制开关,立即将主缸压力建立至12MPa(足以使车轮抱死),然后通过控制8个轮缸电磁阀的通断来调节轮缸压力,从而避免车轮抱死.图3 ABS液压制动台架4 实验分析基于上述HIL 测试平台,就可以方便地对ABS ECU 完成各种性能考核,对于不同路面条件(高/低附着、对开/对接),不同初始车速(低速/高速),不同载荷(空载/满载),离合器接合/分离下的ABS测试,只需要在EE 界面修改VDYM 模型中相关参数即可.为了对纯软件仿真与硬件在环仿真结果进行比较,将左前轮与右后轮接入硬件在环系统,右前轮与左后轮处于纯软件仿真模式.这里给出两组ABS典型路面下的HIL测试结果.4.1 高附着路面将路面附着系数设置为0.7,初始制动车速设定为110km/h.图4反映了ABS制动过程中速度、滑移率以及轮缸压力的变化情况.图4 高附着路面测试结果图4a)左前轮和右后轮的轮速波动相对偏大,同时单次ABS循环的周期较长.图4b)也反映出虽然4个车轮滑移率的均值相当,但右前轮和左后轮的滑移率被控制在0.1~0.2之间,而左前轮和右后轮的滑移率的变化范围为0.05~0.4.这是由于实际液压制动系统的响应滞后引起的,从图9c)代表的轮缸压力曲线也能体现.左前轮和右后轮的初始建压时间约有0.5s的延迟,同时增减压的速率也相对较慢,从而导致ABS制动中的控制循环次数较少.4.2 低附着路面将路面附着系数设置为0.3,初始制动车速设定为110km/h.ABS制动下的速度、滑移率和压力曲线见图5.由图5可知,在低附着路面上由于液压制动系统导致的相关结论仍然适用,并且减压速率更慢.同时相对于高附着路面,ABS 的调控次数显著增多(左前轮多6次;右后轮多4次),制动时间显著延长(多5.9s).如图5a),b)所示,轮速波动及滑移率变化范围更加明显,而图5c)表明,轮缸压力的调节范围由高附着的6~10MPa降至1~3 MPa,与实际ABS制动特性相符合.图5 低附着路面测试结果5 结束语1)由实验结果可知,HIL测试与纯数值仿真相比,由于接入了真实的液压制动系统,ABS 控制器的逻辑参数更具有实际意义.2)与实车测试相比,基于Labcar的硬件在环测试能够方便地进行各种工况下的ABS测试,同时可以根据测试结果反复标定逻辑门限值,为快速开发ABS控制器提供了一种有效的手段.3)下一步可结合Labcar的故障注入功能,着重完善ABS控制器的故障诊断逻辑,为其产品化打下基础.参考文献[1]张为,王伟达,车坚志,等.基于V 模式的机电复合传动能量管理控制系统设计[J].农业机械学报,2012,43(10):1-7,13.[2]SCHUETTE H,WAELTERMANN P.Hard-warein-the-loop testing of vehicle dynamics contr-ollers-A Technical Survey[C].SAE Paper,2005-01-1660,2005.[3]CHUL S.Evaluation of motor characteris-tics for hybrid electric vehicles using the hardware-in-theloop concept[J].IEEE Transactions on Vehicu-lar Technology,2005,54(3):817-824.[4]MARTIN A,EMAMI M A.Dynamic load emulation in hardware-in-the-loop simulation of robot manipulator[C].IEEE Transactions on Industrial Electronics,2011,58(7):2980-2987.[5]郑朝武.基于LabCar的ISG 混合动力电动汽车控制策略仿真与测试[D].杭州:浙江大学,2011.[6]李淑英.基于LabCar2AT 的硬件在环仿真系统开发[D].长春:吉林大学,2009.[7]张云清,熊小阳,陈伟,等.基于车轮减速度及滑移率的ABS联合仿真研究[J].系统仿真学报,2008,20(8):2171-2176.[8]王伟达,丁能根,张为,等.ABS逻辑门限值自调整控制方法研究与试验验证[J].机械工程学报,2010,46(22):90-95,104.[9]陈炯,王会义,宋健.基于滑移率和减速度的ABS模糊控制仿真研究[J].汽车工程,2006,28(2):148-151,180.[10]张为,丁能根,余贵珍,等.汽车ABS电子控制单元综合性能测试试验台[J].农业机械学报,2009,40(9):37-40.。
ADAS实验平台硬件在环仿真
10.16638/ki.1671-7988.2019.09.012ADAS实验平台硬件在环仿真*许广吉,石晶(辽宁工业大学汽车与交通工程学院,辽宁锦州121000)摘要:高级辅助驾驶(Advanced Driver Assistant System,ADAS)可以在很大程度上降低交通事故,减少人员伤亡和不必要的经济损失。
因此,各个汽车厂以及高校对ADAS进行研发。
文章进行ADAS实验台进行搭建,并且能过实现MA TLAB/Simulink、NI-Veristand和CarSim软件的联合仿真。
关键词:ADAS实验平台;仿真中图分类号:U467 文献标识码:A 文章编号:1671-7988(2019)09-42-02ADAS experimental platform hardware in the loop simulation*Xu Guangji, Shi Jing(College of Automobile and Transportation Engineering, Liaoning University of Technology, Liaoning Jinzhou 121000 )Abstract: Advanced Driver Assistant System (ADAS) can greatly reduce traffic accidents, casualties and unnecessary economic losses. Therefore, each automobile factory as well as the university carries on the research and development to the ADAS. In this paper, the ADAS experimental platform was built and the joint simulation of MA TLAB/Simulink, ni-veristand and CarSim software was realized.Keywords: ADAS experimental platform; The simulationCLC NO.: U467 Document Code: A Article ID: 1671-7988(2019)09-42-02前言高级驾驶辅助系统(Advanced Driver Assistant System,ADAS),是基于安装在汽车上的各种传感器,在汽车行驶的过程中收集车内外的数据、辨识静态和动态物体,进行运算和分析并将相关信息反馈给驾驶者或进行相关的辅助决策,从而提高汽车行驶的安全性[1]。
气压 ABS 的硬件在环仿真与测试
气压 ABS 的硬件在环仿真与测试孙俊;陈可际;裴晓飞;过学迅;孙陈迪【摘要】为获得接近实车环境下的测试结果,搭建了基于Labcar的气压 ABS硬件在环仿真系统。
在Labcar PC中搭建了车辆制动模型,将其编译后下载到Labcar仿真工控机中运行。
开发了嵌入式ABS控制器,实现对气压ABS执行器的实时控制。
利用Labcar的轮速发生板卡模拟轮速信号并进行数据采集,同时通过该板卡可模拟常见的轮速故障。
在所搭建的硬件在环系统中进行了ABS高附、低附路面的试验,试验结果表明,该硬件在环系统能够满足ABS控制器的仿真测试需求。
%In order to obtain the test results under the condition close to real vehicle ,the pneumatic ABS hardware-in-the-loop (HIL) system based on Labcar is built .A vehicle braking dynamic model is built on Labcar PC software platform .After complied ,the model is downloaded to Labcar Real Time PC (RTPC) .Then the embedded ABS ECU is developed ,which realizes the adjustment of ABS actu-ator .The wheel-speed signal and signal faults are simulated through board card in Labcar .At last , the HIL experiment on high-adhesion and low-adhesion road is carried out .The test results show that the system satisfies the requirements of the HIL tests towards pneumatic ABS ECU .【期刊名称】《武汉理工大学学报(交通科学与工程版)》【年(卷),期】2016(040)005【总页数】5页(P845-849)【关键词】车辆工程;气压ABS;动力学模型;轮速信号模拟;硬件在环【作者】孙俊;陈可际;裴晓飞;过学迅;孙陈迪【作者单位】现代汽车零部件技术湖北省重点实验室1 武汉 430070; 汽车零部件技术湖北省协同创新中心2 武汉 430070;现代汽车零部件技术湖北省重点实验室1 武汉 430070; 汽车零部件技术湖北省协同创新中心2 武汉 430070;现代汽车零部件技术湖北省重点实验室1 武汉 430070; 汽车零部件技术湖北省协同创新中心2 武汉 430070;现代汽车零部件技术湖北省重点实验室1 武汉 430070; 汽车零部件技术湖北省协同创新中心2 武汉 430070;现代汽车零部件技术湖北省重点实验室1 武汉 430070; 汽车零部件技术湖北省协同创新中心2 武汉 430070【正文语种】中文【中图分类】U461.3硬件在环仿真技术(hardware in the loop,HIL)是一种用于测试ECU的功能、系统集成与通信的方法[1].由于在试验系统中嵌入了难于用模型表示的实物,有效提高了仿真测试的准确度[2-3].国外有关ABS HIL仿真技术已比较成熟[4-8].国内对制动防抱死的研究主要集中在液压制动系统方面,有关气压ABS HIL的研究相对较少.文献[9]侧重介绍了基于Labcar的气压ABS HIL仿真平台的搭建,同时利用该平台对以滑移率为目标参数的控制算法进行了仿真;郭芹凤[10]对制动过程的数学模型、ABS的控制算法和ECU的软硬件设计做了详细的介绍,文献[3]对ABS系统的制动效能和制动稳定性进行了仿真分析,但这两篇文献都是将气源、制动踏板及制动轮缸以数学模型的形式接入到HIL仿真系统,很难准确的反映实际情况;黄有林、任国新虽然都做了ABS HIL仿真,但其控制算法也是通过计算机仿真实现的,并未烧录到实际控制器当中.针对上述情况,搭建了更加接近实车环境的气压ABS HIL仿真系统,并对ABS嵌入式控制器进行HIL测试.基于Labcar软硬件平台建立的HIL仿真结构见图1.主要特点是:车辆制动动力学模型和车辆轮胎模型集中在仿真工控机(real time PC, RTPC)中,较难用数学模型表达的气源、制动踏板和制动气室等通过气压制动台架接入到HIL系统,控制算法运行在实际的控制器上.其工作原理是在Labcar PC软件环境中建立车辆Simulink仿真模型,编译并下载到RTPC.制动开始后,气源给制动气室充气,RTPC通过模数转换板卡获取制动气室的压力信号,并将模型实时计算得到的轮速信号,通过轮速板卡传送到ABS控制器,控制器根据轮速的变化输出电磁阀的控制指令,调节气室的制动压力.同时可以利用Labcar PC对测试过程及试验数据进行监测,方便参数的匹配.如此构成一个闭环的ABS测试系统.1.1 气压制动台架文中的气压制动台架基于某型城市客车的气压制动系统搭建,见图2.相对于模型仿真,试验台架可以提供更接近实车的环境.空气压缩机作为该制动系统的气源,可以提供制动过程所需的气压;储气罐一方面存储来自气源的高压气体,另一方面调整气流,减小气压的波动,使输出的气压稳定;制动阀连接着制动踏板,控制气压回路的开和关.踩下制动踏板,高压气体经干燥器干燥后经过制动阀到达ABS电磁阀,通过控制电磁阀的开闭实现气室的增压、保压和减压;压力传感器实时采集气室的压力,并返回到模数转换板卡.1.2 气压ABS控制逻辑低附着路面、紧急制动时,车轮易发生抱死现象.车轮被抱死后,车辆失去侧向稳定性,出现侧滑、甩尾等危险状况.ABS通过控制制动压力,将车轮的滑移率保持在最佳滑移率附近,提高车辆稳定性.气压ABS的控制策略见图3.1.3 控制电路板ABS的控制器是ABS的核心,采用模块化的思想设计该控制器的硬件电路.主要包括MCU最小系统板、制动信号采集模块、轮速信号采集模块、电磁阀驱动模块、CAN模块、电机驱动模块以及其他外围电路.在电路板上有与MCU最小系统板插针对应的针孔,可直接插拔最小系统板,方便更换;制动信号是一个开关量,开关量为1时代表制动开始,通过该模块对制动信号进行防抖整形处理,并送入MCU的外部中断端口;利用Labcar的轮速发生板卡模拟磁电式轮速传感器信号,由于该信号是正弦波信号,需轮速采集模块其进行滤波、整形处理成方波,才可接入MCU的频率捕捉模块;电磁阀驱动电路接收MCU发出的压力调节指令,控制电磁阀进行开关操作,实现增压、保压和减压;实际应用中,CAN模块可以实现ABS控制器与整车CAN网络上其他ECU之间的通信.另外,该控制器集成了电机驱动电路,故也可用于液压ABS的开发.在搭建Simulink仿真模型之前,需要建立相应的数学模型.文中采用了七自由度车辆动力学模型,其中根据车辆的单轨模型有:式中:m为车辆质量,kg;Iz为车辆绕z轴的转动惯量,kg·m2;δ为前轮转角;Cw为车辆轮距,m;vx为车辆纵向速度,m/s;vy为车辆侧向速度,m/s;Φ为车辆横摆角,rad;a,b分别为车辆质心到前后轴距离,m;Fijk为各个方向上的轮胎力,N.动力学模型中的轮胎力由魔术轮胎公式给出,魔术轮胎公式的一般表示式为Y(x)=Dsin {Carctan [Bx-式中:Y(x)为轮胎纵向力或侧向力,N;x为轮胎纵向滑移率或侧偏角;B,C,D,E为模型参数.车辆的纵向滑移率s定义为式中:r为车轮半径,m;ω为车轮角速度,rad/s;v为车轮平面上的轮心速度,m/s.对前轮有:对后轮有在制动过程中伴随着轴荷转移,使得车轮垂向载荷被表达为式中:hg为车辆质心高度,m;g为重力加速度,g=9.8 m/s2;L为前后轴距,L=a+b,m.另外,单个车轮的动力学方程为式中:Iw为车轮转动惯量,kg·m2;Fx为轮胎纵向力,N;Tb为制动力矩,N·m.根据以上数学模型搭建的Simulink模型见图bcar的A/D板卡采集到的气室压力信号,经左侧4个接口输入车辆模型;右侧4个端口输出模型实时计算得到的轮速信号,通过轮速板卡将轮速信号输入到ECU.ETAS LABCARHIL系统通过模拟整车环境和信号交互环境,能够为ECU控制功能测试提供理想的整车环境,并通过测试保证ECU软件设计质量.3.1 ES1337轮速发生板卡轮速传感器为ABS ECU提供实时的轮速信号,是ABS系统中核心的传感器,逻辑门限值控制算法中的滑移率和车轮减速度都是根据轮速计算得到,故轮速传感器采集到的信号对ABS ECU的控制效果有很大的影响.轮速采集模块将磁电式轮速传感器输出的正弦信号转变成同频率的方波信号,MCU再对该方波信号进行采集.信号频率可表示为式中:f为正弦信号频率;z为齿圈齿数;n为轮速.利用ES1337硬件板卡对轮速信号进行模拟,代替真实的传感器信号,构建HIL 仿真的闭环控制,同时对轮速信号的故障进行分析.文中对汽车上常用的磁电式轮速传感器的信号和故障进行模拟.ES1337共有4个信号发生器,可同时提供4路轮速信号.主要指标为输出电压范围-10~+10 V,10 bit(20 mV)分辨率,每个通道都有±60 V过高电压保护,且配有断路继电器.该板卡输出轮速信号有2种控制模式:频率模式和轮速模式.前1种模式,模型端口输出的是对应的正弦信号频率;后1种模式,模型端口输出的是经转化后的轮速值.考虑到实际传感器的信号源为轮速,故后1种控制模式更接近实车环境.只须对ES1337轮速板卡进行参数配置,即可实现不同轮速的模拟,缺齿和间隙过大等故障的模拟.3.2 轮速及故障模拟试验在Labcar上位机环境下搭建轮速和故障模拟软件平台,配合ES1337轮速板卡实现轮速和故障的模拟.图5是用示波器显示的ES1337板卡输出的无故障轮速信号,以及经轮速采集模块转化后的方波信号.图5中轮速是60 km/h,车轮半径0.32 m,齿圈齿数48,对应的正弦信号频率为398 Hz.示波器测得转化后的方波信号频率为397 Hz,与计算得到的频率基本一致.图6模拟的是磁电式轮速传感器缺齿故障,该图的车速、车轮半径和齿圈齿数与图5中相同,设置缺齿个数为1个,可以看出模拟的缺齿故障与真实的传感器缺齿故障相同,缺齿时传感器输出电压为0 V,持续时间为1个正弦波周期.在Simulink模型中设置整车和道路参数,对高附着、低附着等典型路面进行HIL仿真试验.4.1 高附着路面高附着路面附着系数设置为0.7,起始制动车速为60 km/h,轮速和气室制动压力曲线见图7.在高附着路面制动时,ABS制动循环的次数较少,平均制动减速度为6.1 m/s2.制动过程中气室压力在0.26~0.5 MPa范围了波动,气室平均压力值在0.42 MPa左右.4.2 低附着路面低附着路面附着系数为0.25,起始制动车速为60 km/h,仿真结果见图8.低附着系数路面制动时,车轮对制动压力更敏感,很容易形成制动循环,因此低附着路面制动时ABS制动循环的次数更多.由于制动压力较低(平均值0.3 MPa),平均减速度小(2.9 m/s2),低附着路面ABS制动过程明显更长.实际电磁阀由于响应特性不同,对ABS气室压力的调节效果有差异.由图7b)和图8b)可知,右前轮的电磁阀响应滞后于左后轮电磁阀,造成右前轮的气室压力调节频繁且压力波动偏大,但均值较理想.此外,由于左后轮和右前轮分别由不同的储气罐供气,储气罐内压力的不同对气压的调节效果也存在一定的影响.高附、低附路面的HIL测试结果表明,制动过程中的轮速和压力值与实际ABS制动效果接近.1) 由于接入了真实的气压制动系统和嵌入式ABS控制器,相较纯软件仿真,HIL仿真更有实际意义,利用该Labcar HIL仿真平台可以方便的对逻辑门限值等参数进行在线调试,提高测试效率,降低参数匹配成本.2) 轮速发生板卡可方便的实现轮速信号和信号故障的模拟,可用于非实车环境下对ABS ECU故障诊断算法的开发.【相关文献】[1]高利华,赵志宇.基于LabCar的车身系统硬件在环仿真测试[J].汽车电器,2015(8):56-59.[2]黄有林.气压ABS硬件在环仿真试验台开发[D].长春:吉林大学,2007.[3]任国新.商用车ABS/TCS集成控制系统硬件在环仿真试验技术研究[D].长春:吉林大学,2008.[4]FORCOR D, ENISZ K. Vehicle dynamics based abs ecu verification on real-time hardware-in-the-loop simulator[C]. 16th International Power Electronics and Motion Control Conference and Exposition,ANTALYA,2014.[5]LEE S, KIM Y, PARK K. Development of hardware-in-the-loop simulation system for multiple ABS and TCS modules[J]. International Journal of Vehicle Design,2004,36(1):13-23.[6]杨学平.基于LabCar硬件在环测试系统的研究[D].昆明:昆明理工大学,2014.[7]SORNIOTTI A. Hardware in the loop for braking systems with anti-lock braking systemand electronic stability program[C]. SAE Technology Paper,2004.[8]SHENKER S, YAMASAKI R, KREUZINGER T. Test of ABS systems for 2-wheelers via hardware-in-the-loop technology[C]. SAE Technology Paper,2013.[9]张巍.气压制动系统ABS硬件在环测试平台研究[D].武汉:武汉理工大学,2013.[10]郭芹凤.重型卡车ABS控制器的硬件在环仿真研究[D].北京:北京工业大学,2007.。
带ADAS功能的整车电器功能硬件在环测试系统研究
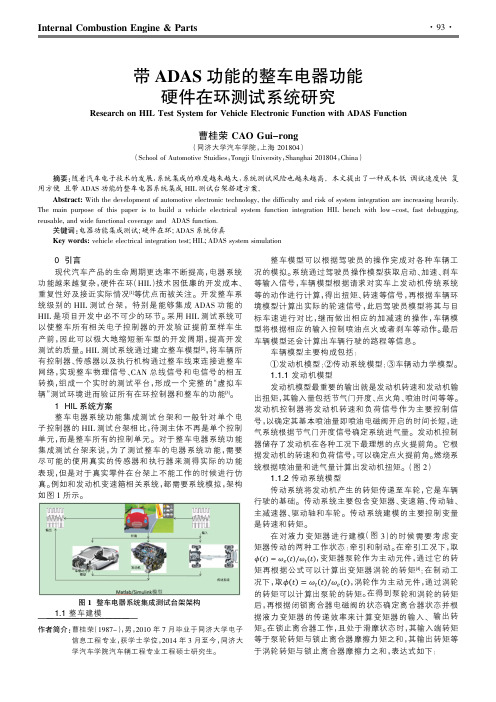
如图1所示。
图1整车电器系统集成测试台架架构1.1整车建模矩器传动的两种工作状态:,矩再根据公式可以计算出变矩器涡轮的转矩取,的转矩可以计算出泵轮的转矩。
再根据闭锁离合器电磁阀的状态确定离合器状态并根———————————————————————作者简介:曹桂荣(1987-),男,2010年7月毕业于同济大学电子信息工程专业,获学士学位,2014年3月至今,同济大学汽车学院汽车辆工程专业工程硕士研究生。
图2发动机燃烧转矩模型(1)(2)在对变速器进行建模的过程中,直接对变速器的输入输出轴进行建模,同时需要考虑变速器在空档和在档的不同工作状态[5]。
(图4)在空挡的情况下,传动系统被切断为两部分,发动机曲轴、变矩器和变速箱输入轴结合成一个部分,变速箱输出轴、减速器和差速器结合成一个部分。
此时变速箱输出转速的计算直接根据前面推导的变速箱方程得到:(3)不在空挡的情况下,根据前面的推导方程,箱输出转速的计算方程:1.1.3车辆动力学模型假定汽车动力驱动系统产生的机械能暂时存储在车①车辆加速的动能;②车辆上坡时的重力势能。
在给定的工况下,车辆的机械能消耗主要包含:①空气阻力损失;②滚动阻力损失;③机械制动能量损失。
因此车辆纵向动力学基本方程可以表示为:(5)其中,F a为空气阻力;F r为滚动阻力;F g为坡度阻力;F d 为其他所有没有考虑的阻力;F t为驱动力,包括动力源提供的动力减去加速旋转部件的惯性力与所有动力系统内部摩擦损失之和。
滚动阻力和空气阻力在任何形式条件下均存在,而坡道阻力和加速阻力仅在一定的行驶条件下存在。
到基本运动方程:当反作用力R i的虚功则有:所以基本动力学方程为:图3液力变矩器模型据此,根据整车的载荷分布,可以搭建如图5所示模型计算车辆的纵向力分配。
根据整车质量和受力情况计算出整车的加速度,车速和行驶距离。
模型如图6。
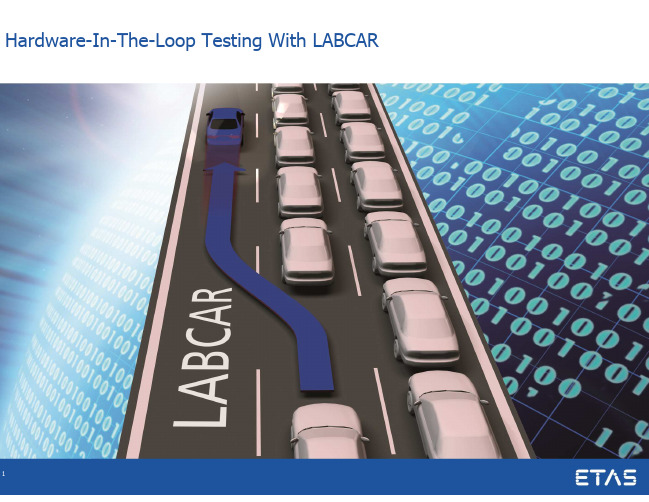
1.2ADAS系统仿真近几年来,新的车型越来越多的都搭载了ADAS,在传统的测试台架中,缺少对ADAS的仿真方案,大多数ADAS功能测试只能在实车上进行,但是实车上测试难度和风险都较高,最理想的方式是直接在台架上进行测试。
ETAS新工具介绍eNewsletter_201211

尊敬的客户与合作伙伴:ETAS 发布了最新一期 eNewsletter,敬请欣赏。
ETAS 收购系统供应商 ESCRYPT ETAS 成功收购 ESCRYPT 公司, 一家专业提供嵌 入式系统安全技术和解决方案的系统供应商。
其 总部位于德国波鸿。
收购交易已经获得反垄断机 构的批准。
双方于 2012 年 4 月份签署收购合同。
作为一个法律上独立运营的公司, ESCRYPT 将由 其常务董事 Thomas Wollinger、Jan Pelzl 以及 André Weimerskirch 博士来长期共同管理。
ESCRYPT 未来发展计划除了继续保持其成功 占领市场的产品和服务外,还将向工业和系统解决方案领域提供服务。
ESCRYPT 在嵌入式电子系统安全解决方案领域处于领先地位。
其解决方案应用范围遍布 汽车及其它各工业领域,例如医疗、自动化技术、芯片、信息技术和机械工程行业。
ETAS 参展 FISITA 2012 世界汽车工程年会暨展览会 第 34 届“FISITA 2012 世界汽车工程年会暨展览会”即将于 2012 年 11 月 27-30 日在北 京国家会议中心隆重开幕。
年会主题是“更绿色、更安全、可持续——低碳时代的汽车与 交通”,由 FISITA 和中国汽车工程学会联合主办。
ETAS 荣幸地成为此次 FISITA 银牌赞 助商。
被誉为“汽车技术联合国”的 FISITA,是国际汽车工程学会联合会的法文缩写,成立于 1948 年,由世界上 38 个国家的汽车工程学会组成,代表 18.5 万余名汽车工程师,现已 成为世界上最具影响力的国际汽车行业组织之一。
其每两年一届的 FISITA 世界汽车工程 年会已成为全球最负盛名的汽车工程技术大会, 每届都吸引来自世界各地的数千名企业高 管、资深工程师参会。
ETAS 在 11 月 28 日下午将举办一场技术分会, 主题为虚拟化 在 ECU 开发中的运用,届时将有多名国内外专家进行精彩的 专题演讲。
ETAS 硬件在环测试系统(LABCAR)
11
ETAS LABCAR, Powerful HIL Platform l ETAS Automotive Technology (Shanghai) Co., Ltd. May-11 © ETAS GmbH 2011. All rights reserved. The names and designations used in this document are trademarks or brands belonging to their respective owners.
LABCAR Scalability
… to full vehicle simulation!
5
LABCAR System Overview | Henrik Liebau | ETAS-STV/PRM-T | 15 Feb 2011 | © ETAS GmbH 2011. All rights reserved. The names and designations used in this document are trademarks or brands belonging to their respective owners.
基于dSPACE的电机控制器硬件在环测试研究

10.16638/ki.1671-7988.2019.18.044基于dSPACE的电机控制器硬件在环测试研究党美婷,任佳越,杨启东(长安大学汽车学院,陕西西安710054)摘要:文章阐述了基于dSPACE的永磁同步电机控制器硬件在环的测试原理,从硬件和软件两个方面分别搭建了硬件在环仿真测试平台。
在所搭建的平台上对永磁同步电机控制器进行硬件在环仿真测试,测试结果表明,该永磁同步电机控制器有着良好的功能性以及该硬件在环仿真测试平台能够对控制器进行有效测试,缩短了控制器的开发周期,减少了开发费用。
关键词:电机控制器;dSPACE;硬件在环中图分类号:TM306 文献标识码:A 文章编号:1671-7988(2019)18-131-04Hardware-in-the-loop Test Study of Motor Controller Based on dSPACEDang Meiting, Ren Jiayue, Yang Qidong( Chang’an University School of Automobile, Shaanxi Xi’an 710054 )Abstract: This paper expounds the hardware-in-the-loop testing principle of dSPACE based permanent magnet synchronous motor controller, building a hardware-in-the-loop simulation test platform from hardware and software. The hardware-in- the-loop simulation test of the permanent magnet synchronous motor controller is carried out on the built platform. The test results show that the permanent magnet synchronous motor controller has good functionality and the hardware-in-the-loop simulation test platform can effectively implement the controller. Testing has shortened the development cycle of the controller and reduced development costs.Keywords: Motor controller; dSPACE; Hardware-in-the-loopCLC NO.: TM306 Document Code: A Article ID: 1671-7988(2019)18-131-04引言新能源汽车在解决能源危机和环境污染方面发挥着不可替代的作用,而纯电动汽车在新能源汽车中又占据着十分重要的地位。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
LABCAR test system solutions for all applications Architecture
Overview
Signal I/O
(back mounted)
19 inch rack, 9 Height units
Load Connectors
(back mounted)
6
Measure Calibration Diagnostics Interface
ETAS LABCAR, Powerful HIL Platform l ETAS Automotive Technology (Shanghai) Co., Ltd. May-11 © ETAS GmbH 2011. All rights reserved. The names and designations used in this document are trademarks or brands belonging to their respective owners.
8 ETAS LABCAR, Powerful HIL Platform l ETAS Automotive Technology (Shanghai) Co., Ltd. May-11 © ETAS GmbH 2011. All rights reserved. The names and designations used in this document are trademarks or brands belonging to their respective owners.
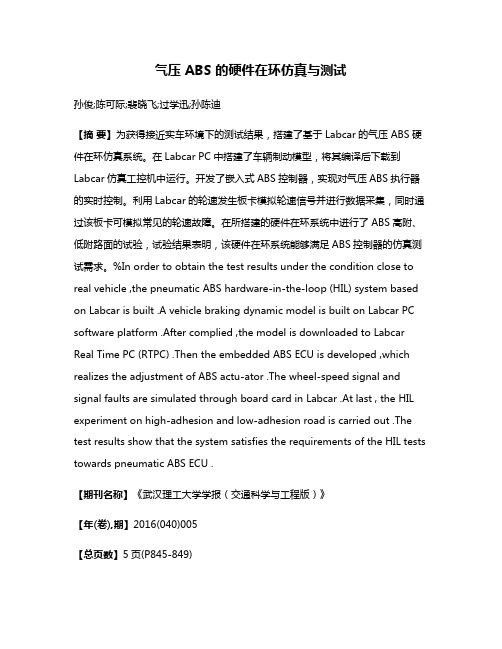
HIL System Architecture
Signal I/O
• Signal conditioning • Loads • Failure Simulation
Real-Time Simulation
• Models • Restbus • Hardware Access
Operation
• Configuration • Model Integration • Experimenting
Test Design Tool
LABCAR-OPERATOR
Error / Load Simulation
LABCAR-RTPC
+
PC ECU MCD Access
Power Supply MATLAB®/Simulink® Models
- Data Exchange - Cable - ETAS Products -Third Party Products
LABCAR
System Setup
LABCAR–IP (Integration Platform)
Integration of Behavior Models Connection of Signals Configuration of Real-Time OS Configuration of CAN and FlexRay Bus Simulation Code generation for LABCAR-RTPC
LABCAR–EE (Experiment Environment)
Experimenting (Drag’n Drop UI) Signal Management Parameterization Variant Management Time Synchronous Access to INCA
LABCAR Scalability
… to full vehicle simulation!
5
LABCAR System Overview | Henrik Liebau | ETAS-STV/PRM-T | 15 Feb 2011 | © ETAS GmbH 2011. All rights reserved. The names and designations used in this document are trademarks or brands belonging to their respective owners.
LABCAR - OPERATOR
Experiment Environment – drag’n drop during runtime
10 ETAS LABCAR, Powerful HIL Platform l ETAS Automotive Technology (Shanghai) Co., Ltd. May-11 © ETAS GmbH 2011. All rights reserved. The names and designations used in this document are trademarks or brands belonging to their respective owners.
LABCAR - OPERATOR
Project Structure
LABCAR-IP
Integration Platform
RTPC
build
C
Modeling Connector Simulink
C
Modeling Connector ASCET
C
Integration of C-Code
C
Integration of Hardware
ECU(s)
Test Automation
3
ETAS LABCAR, Powerful HIL Platform l ETAS Automotive Technology (Shanghai) Co., Ltd. May-11 © ETAS GmbH 2011. All rights reserved. The names and designations used in this document are trademarks or brands belonging to their respective owners.
Standardized Wiring & Connectors
Immobilizer EGR CAN Bus
ECU
OBD
• Standardized wiring and connectors • Reduced effort for system integration, simplified maintenance and support • Realization of complex applications (e.g. combination of real and dummy loads)
C
Integration of CAN / FlexRay
C
…
Integration of Customer Modules
exe
MATLAB Simulink
ASCET
LABCAR
LABCAR
NIC/NIF
Customerdel
C-Code
Model
Model
LABCAR test system solutions for all applications
Product Portfolio
control & automtation SW & models
LABCAR-AUTOMATION INCA
test system HW
Signal I/O - Automotive Signal I/O - Generic Signal Conditioning
LABCAR Scalability
from smallest component test system…
4
LABCAR System Overview | Henrik Liebau | ETAS-STV/PRM-T | 15 Feb 2011 | © ETAS GmbH 2011. All rights reserved. The names and designations used in this document are trademarks or brands belonging to their respective owners.
Integrated Break-out Box ECU Connector Box Real-time PC Power Supply Software Pack
including pre-configured projects
7
ETAS LABCAR, Powerful HIL Platform l ETAS Automotive Technology (Shanghai) Co., Ltd. May-11 © ETAS GmbH 2011. All rights reserved. The names and designations used in this document are trademarks or brands belonging to their respective owners.
LABCAR test system solutions for all applications
key feature: standard hardware components
9
ETAS LABCAR, Powerful HIL Platform l ETAS Automotive Technology (Shanghai) Co., Ltd. May-11 © ETAS GmbH 2011. All rights reserved. The names and designations used in this document are trademarks or brands belonging to their respective owners.