一种基于DSP的电动机实时监测及故障诊断系统
一种基于DSP的电动机实时监测及故障诊断系统
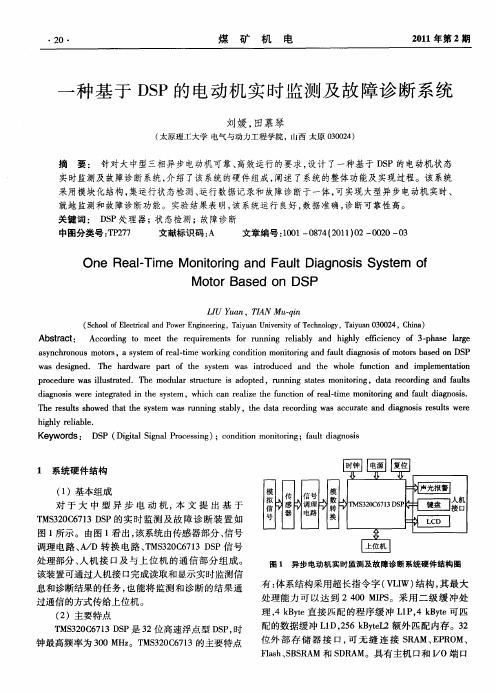
图 1 示 。 由图 1 出 , 所 看 该系统 由传 感器部分 、 信号
调理 电路、 / A D转换电路、 M 30 6 1 S T S2 C7 3D P信号 处 理部分 、 机接 口及 与 上 位 机 的 通信 部 分 组 成 。 人 该装 置可通过 人机接 口完成读取 和显示实 时监测信
T e r s l h w d t a h y tm a u nn t by h aa r c r ig wa c u ae a d d a o i r s l r h e ut s o e h t e s se w sr n i g s l ,t e d t e o dn s a c r t n ig ss e u t wee s t a n s
( col f lc cl n o e nier g T i a nvr t o ehooy T i a 304, hn ) Sh o o Eet a adP w r gnei , a unU ie i f cnl , a un0 02 C ia i r E n y sy T g y
1 系统 硬件结构 ( )基本组 成 1
模 拟 信 号
时钟 I 电源 l 复位 I J
对 于 大 中 型 异 步 电 动 机 , 文 提 出 基 于 本 T 30 6 1 S MS2 C 7 3D P的实 时 监 测 及故 障诊 断 装 置 如
羹 塑 H:s 善 幅 。皇f 薹 , P五 o C 兰
da o i r ne r td i h y tm ,wh c a e l e t e f n t n o e lt em o io n n a l d a n ss ig ss we e i tga e n t e s se n i h c n r ai h u ci fr a—i n tr g a d fu t ig o i. z o m i
DSP在电机控制系统中的应用
2. 1启动控制 晶闸管控制着系统的启动,是电机控制系统的开
关,电机的端电压除了与功率因数有关,还与触发角有 着密切联系,但是端电压和控制角之间缺少相同的控 制属性。PID控制算法简单、实用性强、应用广泛,控 制参数之间没有关联,且参数计算简单,实践和理论证 明,其是最优控制器。使用PID控制电机启动,应用其 自动化调整功能,对控制参数出现的偏差进行调整,根 据电机参数变化,调整电机控制策略,保证电机稳定运 行,可实现DSP控制系统的智能化控制。电机启动有 两种,即限流和全压。限流启动的原理是将PID控制 应用于电机控制系统,通过调整电机允许的最大电流, 来控制电机启动,当PTD控制接收到电流处于稳定值 的反馈信号后,结束启动控制。全压启动的原理是控 制角的触发脉冲快速增长至最大值,同时端电压增长 至给定值,电机控制系统中的过电流需设置较高,一般 为给定值的5倍,当电机内的启动电流超过系统的过 电流给定值时,PID控制启动,通过降低电机电流,进 行电机启动控制。 2.2停车策略
DSP控制系统通过编写的程序,判断电机的运行 状况,并发出控制指令,由PWM信号输出端口输出调 制的脉冲,形成晶闸管触发脉冲,然后输入到光耦合器 件,经过反相器处理后,使触发信号放大,进入脉冲变 压器,实现DSP对晶闸管的控制。
3结语
DSP技术作为一种新型技术,通过对电压和电流 信号的采集和处理运行编写的程序,对电机进行启动、 停车处理,提升了电机整体性能,促进了电机控制系统 的智能化发展。DSP电机控制系统具有自动检测功 能,可判断电机启动状态,保证电机正常启动,实时监 管电机运行过程中电压和电流的波动情况,当发现异 常后,及时进行调整,维护电机稳定、安全运行,提升电 机运行效率。
(Harbin Electric Machinery Company Limited, Harbin 150040, China)
用于电动汽车的永磁同步电机驱动控制系统设计与实现
用于电动汽车的永磁同步电机驱动控制系统设计与实现1. 本文概述随着全球对可再生能源和环保意识的日益增强,电动汽车(EV)作为一种绿色、低碳的出行方式,正逐渐成为未来交通的主要趋势。
作为电动汽车的核心部件,电机驱动控制系统的性能直接影响着车辆的动力性、经济性和可靠性。
永磁同步电机(PMSM)因其高效率、高功率密度和优良的控制性能,在电动汽车领域得到了广泛应用。
本文旨在探讨用于电动汽车的永磁同步电机驱动控制系统的设计与实现,为电动汽车的进一步发展提供技术支持和理论参考。
文章首先介绍了永磁同步电机的基本原理和特性,分析了其在电动汽车应用中的优势和挑战。
随后,详细阐述了永磁同步电机驱动控制系统的总体设计方案,包括硬件平台的选取、控制策略的制定以及关键技术的实现。
在硬件设计方面,文章讨论了功率电子开关的选择、电流传感器的配置以及电机参数的匹配等问题。
在控制策略方面,文章重点介绍了矢量控制、直接转矩控制等先进控制方法,并分析了它们在提高电机性能、优化能量利用等方面的作用。
文章还针对永磁同步电机驱动控制系统中的关键技术问题,如参数辨识、无位置传感器控制、热管理等进行了深入研究和探讨。
通过理论分析和实验验证,文章提出了一系列有效的解决方案,为永磁同步电机在电动汽车中的实际应用提供了有力支持。
文章总结了永磁同步电机驱动控制系统的设计与实现过程中的经验教训,展望了未来在该领域的研究方向和应用前景。
通过本文的研究,旨在为电动汽车的电机驱动控制技术的发展提供有益的参考和借鉴。
2. 永磁同步电机在电动汽车中的应用及优势提高电动汽车效率:永磁同步电机能够提供稳定和强大的磁场,提高电机的效率和输出功率,从而提高电动汽车的动力性能。
增强电动汽车性能:永磁同步电机的转子损耗很小,功率密度高,可采用多极,为采用直接驱动、全封闭结构和系统集成化提供了可能。
高效能:永磁同步电机的能效更高,不需要产生额外的磁场,转子能够快速响应变化的负载条件,实现最大功率输出。
基于DSP的永磁同步电机矢量控制系统的研究与设计共3篇

基于DSP的永磁同步电机矢量控制系统的研究与设计共3篇基于DSP的永磁同步电机矢量控制系统的研究与设计1基于DSP的永磁同步电机矢量控制系统的研究与设计随着现代电子技术的发展,控制技术逐渐成为重要的研究领域。
永磁同步电机作为一种高效、稳定的电机,已经得到广泛应用。
而矢量控制技术,则可实现对永磁同步电机的精确控制,提高其效率和稳定性。
本文,我们将介绍基于DSP的永磁同步电机矢量控制系统的研究和设计。
从系统架构、控制算法、硬件设计以及实验测试等方面,详细探究其原理和实现方法。
一、系统架构永磁同步电机矢量控制系统主要由两部分组成:控制器和电机。
其中,控制器采用DSP作为核心,运行矢量控制算法,将电机转速、位置等信息输入进行控制。
电机由永磁同步电机、驱动器和传感器组成。
二、矢量控制算法矢量控制算法主要包括两种:基于空间矢量分解的矢量控制和基于旋转矢量的矢量控制。
其中,基于空间矢量分解的矢量控制是通过将电机的空间矢量分解为定子和转子磁链矢量,控制其大小和相位差来实现永磁同步电机的转矩和转速控制;基于旋转矢量的矢量控制则是通过构建一个旋转矢量,并控制其与电机运动的相对位置来实现对电机的精确控制。
三、硬件设计在硬件设计方面,我们采用了一种小型化的设计方案,将DSP 与其他电路集成在一起,便于控制和维护。
电机驱动器采用了3相全桥逆变器,可实现对电机的相位和大小控制。
传感器为霍尔传感器,并通过反馈控制将电机转速等信息输入到控制器中。
四、实验测试为了验证所设计的永磁同步电机矢量控制系统的有效性,我们进行了实验测试。
通过转速和转矩测试,得到了电机在加速、减速、负载改变等情况下的运行特性。
实验结果表明,所设计的永磁同步电机矢量控制系统具有较高的控制精度和稳定性。
五、结论综上所述,基于DSP的永磁同步电机矢量控制系统的研究和设计可实现对永磁同步电机的精确控制,提高其效率和稳定性。
对于电机控制领域的研究和应用具有一定的参考和借鉴价值本文介绍了基于DSP的永磁同步电机矢量控制系统的研究和设计。
基于DSP的断路器在线监测与诊断系统
摘要 : 设计并 开发 了一种基 于 T L 2 0 S MS F4 7D P芯片的 断路 器状 态在 线监测与诊 断 系统。介绍 了各 主要 硬件模块 的
设计 原 理 和 功 能 。针 对 国 内石 墨 喷 口断 路 器使 用 数 量 逐 年 增加 , 而一 般 测 量 仪 器 无 法测 量 它 的动 作 时 间及 速 度 特 性 , 通
0 引 言
时间通道的作 用是测量 断路 器控制命令 发 出后 断路器 的
响应时 间, 括主断口, 闸电阻 的动作 时间 , 包 合 同时也 可以测量 断路器控制 回路的辅助接点 的动作时 间。
断路器是 电力系统 中最重要 的控 制与保护设备 , 其故 障带 来的后果 十分严重 。直接危 害是被 断路器所保护 的线 路 、 备 设
关键词 : 高压 断路 器 ; 线 监 测 ; S 在 DP
中图分类号 :M 6 T 51
文献标识码 : B
文章编号:0 2—14 (0 8 0 0 5 0 10 8 1n n a n ss S se f r - n n t i g a d Di g o i y tm o i o Hih Vo t g r u tBr a e s d o P g la e Cic i e k rBa e n DS
fre o tg a eo m n y e t e r lv n a a tr ,h a e e i e h a h t b e k mo i r g mo ue An o u e e rd v l e w v fr t a a z h ee a t r mee t ep p rd sg d t e g p i r a nt i d l . d fc s d a o l p s n r e on o ed sg r cp e n lme t o et a u e n n t g a h t r a a u e n d lsa d P i g o t x e n t e i p n i lsa d ee ns f h i me s rme t i, p i b e k me r me t h n i t me u r e s mo u e n C d a si e p  ̄ n c s se s f r e T e o eai n r s l h w t a e s se a he e h efr n c s a d te d ma d e n d sg n t r s y tm o t wa h p r t e u t s o h tt y tm c iv s te p roma e n h e n ss t e i a d i wo k o s h i n se d l . ta i y Ke r s h g ot g ic i b e k o — n n tr g DS y wo d : i h v l e cru t r a ; n l e mo i i ; P a i on
基于DSP的永磁同步电动机矢量控制系统研究 电气工程及其自动化专业毕业设计 毕业论文

诚信声明本人声明:1、本人所呈交的毕业设计(论文)是在老师指导下进行的研究工作及取得的研究成果;2、据查证,除了文中特别加以标注和致谢的地方外,毕业设计(论文)中不包含其他人已经公开发表过的研究成果,也不包含为获得其他教育机构的学位而使用过的材料;3、我承诺,本人提交的毕业设计(论文)中的所有内容均真实、可信。
作者签名:日期:年月日湖南工程学院毕业设计(论文)任务书————☆————设计(论文)题目:基于DSP的永磁同步电动机矢量控制系统研究姓名周琳系别应用技术学院专业电气工程及其自动化班级0786 学号200713010616指导老师颜渐德教研室主任谢卫才一、基本任务及要求:1)掌握矢量控制的基本原理。
2)掌握永磁同步电动机矢量控制系统。
3)利用MATLAB软件仿真,分析。
4)硬件设计及软件设计二、进度安排及完成时间:2月20日:布置任务,下达设计任务书2月21日——3月10日:查阅相关的资料(总参考文章15篇,其中2篇以上IEEE的相关文章)。
3月13日——3月25日:毕业实习、撰写实习报告3月27日——5月30日:毕业设计、4月中旬毕业设计中期抽查6月1日——6月7日:撰写毕业设计说明书(论文)6月8日——6月10日:修改、装订毕业设计说明书(论文),并将电子文档上传FTP。
6月11日——6月12日:毕业设计答辩目录摘要 (I)ABSTRACT (II)第1章概述 (1)1.1永磁同步电动机的发展概况及应用前景 (1)1.1.1 永磁同步电动机发展概况 (1)1.1.2 永磁同步电动机特点及应用 (2)1.2永磁同步电动机控制系统的发展现状与趋势 (3)1.3课题研究的背景及本文的主要研究内容 (4)1.4本课题的研究意义 (5)第2章永磁同步电动机的结构及其数学模型 (7)2.1永磁同步电动机的结构 (7)2.2永磁同步电动机的数学模型 (8)2.2.1 永磁同步电机在静止坐标系(UVW)上的模型 (8)α-)上的模型方程 (10)2.2.2 永磁同步电机在两相静止坐标系(β2.2.3 永磁同步电机在旋转坐标系(d q-)上的数学模型 (12)第3章永磁同步电机矢量控制及空间矢量脉宽调制 (16)3.1永磁同步电机的控制策略 (16)3.1.1永磁同步电机外同步控制策略 (16)3.1.2 永磁同步电机自同步控制策略 (16)3.1.3 永磁同步电动机的弱磁控制 (19)3.2空间矢量脉宽调制(SVPWM) (19)3.2.1 空间矢量脉宽调制原理 (19)3.2.2 空间矢量脉宽调制实现 (22)3.3PI控制器的设计 (24)3.3.1 电流环PI控制器的设计 (24)3.3.2 速度环PI控制器的设计 (25)第4章系统仿真模型 (26)4.1MATLAB仿真工具箱简介 (26)4.2闭环控制系统仿真 (27)4.3仿真结果及分析 (31)第5章永磁同步电机控制器的硬件设计 (34)5.1功率变换单元的设计 (34)5.1.1 三相桥式主电路 (35)5.1.2 IR2130驱动器 (36)5.1.3 信号隔离电路 (38)5.2检测单元的设计 (38)5.2.1位置检测单元的设计 (38)5.2.2 电流检测电路 (40)5.2.3 电压检测电路 (40)5.3控制器的设计 (41)5.3.1 DSP的特点和资源 (42)5.3.2 系统设计中所用的DSP硬件资源 (43)5.4电平转换 (44)5.5保护电路的设计 (45)5.5.1 过流保护电路 (45)5.5.2 过压保护电路 (46)5.5.3 上电保护电路 (46)5.5.4 系统保护电路 (47)第6章永磁同步电机控制器的软件设计 (48)6.1DSP软件一般设计特点 (48)6.1.1 公共文件目标格式 (48)6.1.2 Q格式表示方法 (49)6.2控制系统软件的总体结构 (50)6.3控制系统子程序设计 (53)6.3.1 位置和速度计算 (53)6.3.2 速度、电流PI控制 (55)6.3.3 电流的采样与滤波 (56)6.3.4 坐标变换软件实现 (58)6.3.5 正余弦值的产生 (58)6.3.6 空间矢量PWM程序 (59)结束语 (60)参考文献 (61)致谢 (62)附录 (63)基于DSP永磁同步电动机矢量控制系统研究摘要:本论文在分析了PMSM的结构、数学模型的基础上采用弧公司专用于电机控制的TMS320F2407A型数字信号处理器作为核心,开发了全数字化的永磁同步电机矢量控制调速系统,主要完成了以下几个方面的工作:(1)本文查阅大量的文献资料,阐述了永磁同步电机的发展概况及应用以及其控制系统的发展现状,讨论了此课题的研究意义。
基于DSP和BP神经网络的旋转机械在线故障诊断系统
关键词 : 旋转机械 ; 在线故 障诊 断; 数据采集 ; S ; P神 经网络 D PB 中图分类 号 :P 8 ;P 1 T 13 T 3 1 文献标识码 : A 文章编号 : 0 1 2—14 (0 10 0 6 0 0 8 1 2 1 )3— 0 4— 3
Ab t a t I r e o me tte n e fo l e d a n s fr tr c i e, n l e f u t ig o i s se o o ay ma h n s r c :n o d rt e h e d o n i ig o i o o ay ma h n a o ・ n a l d a n ss y tm fr t r c ie n s i b s d o S n P n u a ewo kwa e e o e . t o k D P TMS 2 F 8 2 a h o e p o e s r a d iv le h aa a q i a e n D P a d B e r l t r sd v lp d I to S ・ n 3 0 2 1 st e c r r c s o , n n ov d t e d t c u - st n o i r t n s n n o ain s e d sg a . o ec mmo u t f oa c i e a ̄ q e e p cr m lo t m a e n ii f b ai i a a d r t t p e in F rt o o v o gl o 1 h n f l o tr ma h n , e u n y s e tu ag r h b s d o a r y i
基于DSP的永磁同步电机控制系统硬件设计
基于DSP的永磁同步电机控制系统硬件设计胡宇;张兴华【摘要】以小功率永磁同步电机(PMSM)为研究对象,结合数字信号处理器TMS320F2812功能特点,给出了一套PMSM驱动控制系统硬件设计方案.详细阐述了功率驱动主电路、反馈信号检测电路以及供电电路的设计,介绍了主要元器件选型和参数计算方法.基于设计的硬件平台,对PMSM调速控制系统进行了测试.试验结果表明,所设计的控制系统硬件设计可靠、性能稳定、控制精度高.%Based on the controlled object of small power permanent magnet synchronous motor (PMSM),combined with the main features of digital signal processor TMS320F2812,an overall hardware design scheme had been put forward for the PMSM drive control system.Design of the power driven main circuit had illustrated,signal detection circuit and power supply circuit in detail,meanwhile introduced the main components selection and parameters calculation method.Based on the designed hardware platform,the control system of PMSM had been performed a functional test.Experimental results showed that the hareware design of control system had good reliability with stable performance and high control precision.【期刊名称】《电机与控制应用》【年(卷),期】2017(044)012【总页数】7页(P19-24,80)【关键词】永磁同步电机;功率驱动主电路;信号检测电路【作者】胡宇;张兴华【作者单位】南京工业大学电气工程与控制科学学院,江苏南京211816;南京工业大学电气工程与控制科学学院,江苏南京211816【正文语种】中文【中图分类】TM351永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)因其体积小、损耗低、功率密度高和效率高等优点,在机械制造、工业控制、航空航天等领域得到广泛应用[1]。
一种基于LabVIEW DSP模块的风机故障诊断系统
0、 周期快 速乘 累加 指令 、 单 并行 运 算 等特性 , 常适 非 合神 经 网络 计 算 的 特点 , 且 D P芯 片 内置 片上 定 并 S 时器 , 用户可 以通过控 制程 序对定 时器进行精 确 的设 置 , 而实现精 确定 时和采样 处理 J a V E D P 从 。L b IW S 模块包 含 了用 于设 计 、 实现 和分 析 D P算 法 的系 统 S
Ab ta t T e a t l e in i d o n f utda o i s se b s d o a V EW P mo ue sr c : h r ce d sg sa k n f a a l ig ss y tm a e n L b I i f n DS d l .Reyn n t en i in f lig o h o s s a o e gl t e fn c l ce y T 3 0 6 1 t e rc g i o y tm t ie o e p cr m r vt e tr o n e e , v lt e u n y h a ol td b MS 2 C 7 3, h e o t n s s e n i e u i z sp w rs e t l u g a i c n e ,s u d l v l wa ee q e c y r f s g n o e fte sg a s fau e v co ,a d a B ew r s ca sf rf rfu td a n ss h x e me t e u t s o e me t w ro in la e t r e tr p h s n P n t o k a l i e o a l ig o i.T e e p r n a r s l h w s i i l s t a t s e e t e t xr c a l if r t n b h o i ain o f n v lta d n u d ewok h t f c i o e t t u t n o mai y t e c mbn t fl i g wa ee n e r n t r .T e e t e s s m a - ii v a f o o i t h ni y t h s a r e d p a i t n e t r xr c in c p b l y h ig o e r s I ae r l b e a d a c r t . a tb l y a d fa u e e t t a a i t.T e da n s e u s r ei l n c u a e i a o i l a Ke r s s u d lv l a l d a n ss S y wo d :o n e e ;fu t ig o i ;D P;l ig wa ee ;B ewo k i n v lt P n t r t f
基于DSP的无刷直流电机运动控制系统研究共3篇
基于DSP的无刷直流电机运动控制系统研究共3篇基于DSP的无刷直流电机运动控制系统研究1无刷直流电机(Brushless DC Motor, BLDC)是一种先进的电机驱动技术,目前广泛应用于各个领域,如汽车、航空、制造业、医疗设备、家用电器等。
随着微电子技术的不断发展,数字信号处理器(DSP)成为控制BLDC电机的主要芯片,因为DSP处理器可以提供高速、高精度的数字信号处理和控制算法,从而实现对BLDC电机的高效控制和优异性能。
基于DSP的无刷直流电机运动控制系统主要包括三个部分:1.硬件部分:包括BLDC电机、功率器件、电源模块、传感器模块和DSP处理器模块等。
BLDC电机是这个系统的核心部件,它由永磁转子、定子、霍尔效应传感器等组成。
功率器件包括驱动电路、继电器、电感电容等,它们主要用于控制电机的启停、方向、转速和转矩等。
电源模块包括直流电源、交流电源和电池等。
传感器模块包括霍尔效应传感器、码盘、温度传感器等,它们用于采集电机的位置、速度和温度等信息。
DSP处理器模块是控制系统的大脑,它接收传感器模块采集的数据,并根据特定的控制算法产生控制信号。
2.软件部分:包括控制算法和编程语言等。
控制算法是基于DSP处理器开发的,它可以分为开环控制和闭环控制两种。
开环控制是指在没有传感器反馈的情况下,直接根据经验公式控制电机的转速、转向和转矩等。
闭环控制是指根据传感器反馈的信息,采取反馈控制策略来控制电机的转速、转向和转矩等。
编程语言包括C语言、汇编语言、机器语言等,它们主要用于实现DSP处理器的控制算法和程序框架。
3.系统测试与优化部分:主要包括测试、诊断和优化等过程。
测试过程包括静态测试和动态测试两种。
静态测试时,通过输入一些命令和参数,观察电机的响应和输出情况。
动态测试是指电机在运动时进行测试,通过观察电机的转速、转向和转矩等参数,判断控制效果。
诊断过程是根据测试结果,对系统进行故障诊断和调试等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一种基于DSP的电动机实时监测及故障诊断系统刘媛,田慕琴(太原理工大学电气与动力工程学院,山西太原030024)摘要:针对大中型三相异步电动机可靠、高效运行的要求,设计了一种基于DSP的电动机状态实时监测及故障诊断系统,介绍了该系统的硬件组成,阐述了系统的整体功能及实现过程。
该系统采用模块化结构,集运行状态检测、运行数据记录和故障诊断于一体,可实现大型异步电动机实时、就地监测和故障诊断功能。
实验结果表明,该系统运行良好,数据准确,诊断可靠性高。
关键词:DSP处理器;状态检测;故障诊断中图分类号:TP277文献标识码:A文章编号:1001-0874(2011)02-0020-03One Real-Time Monitoring and Fault Diagnosis System ofMotor Based on DSPLIU Yuan,TIAN Mu-qin(School of Electrical and Power Engineering,Taiyuan University of Technology,Taiyuan030024,China)Abstract:According to meet the requirements for running reliably and highly efficiency of3-phase large asynchronous motors,a system of real-time working condition monitoring and fault diagnosis of motors based on DSP was designed.The hardware part of the system was introduced and the whole function and implementation procedure was illustrated.The modular structure is adopted,running states monitoring,data recording and faults diagnosis were integrated in the system,which can realize the function of real-time monitoring and fault diagnosis.The results showed that the system was running stably,the data recording was accurate and diagnosis results were highly reliable.Keywords:DSP(Digital Signal Processing);condition monitoring;fault diagnosis1系统硬件结构(1)基本组成对于大中型异步电动机,本文提出基于TMS320C6713DSP的实时监测及故障诊断装置如图1所示。
由图1看出,该系统由传感器部分、信号调理电路、A/D转换电路、TMS320C6713DSP信号处理部分、人机接口及与上位机的通信部分组成。
该装置可通过人机接口完成读取和显示实时监测信息和诊断结果的任务,也能将监测和诊断的结果通过通信的方式传给上位机。
(2)主要特点TMS320C6713DSP是32位高速浮点型DSP,时钟最高频率为300MHz。
TMS320C6713的主要特点图1异步电动机实时监测及故障诊断系统硬件结构图有:体系结构采用超长指令字(VLIW)结构,其最大处理能力可以达到2400MIPS。
采用二级缓冲处理,4kByte直接匹配的程序缓冲L1P,4kByte可匹配的数据缓冲L1D,256kByteL2额外匹配内存。
32位外部存储器接口,可无缝连接SRAM、EPROM、Flash、SBSRAM和SDRAM。
具有主机口和I/O端口·02·煤矿机电2011年第2期操作等功能,多通道缓冲串口,其通过配置能和多种串行通信接口通信,两个32位通用定时器等。
鉴于TMS320C 6713卓越的计算能力和运行速度,本文采用该芯片来实时处理电动机故障。
2系统功能模块化设计通过模块化的设计思想主程序通过调用每一模块的子程序来完成检测任务,子程序可独立修改,CPU 也可避免循环执行整个程序导致运行效率低下。
根据图1系统功能的要求,设计的异步电动机实时监测及故障诊断系统的主程序如图2所示。
其中包括数据初始化程序、A /D 转换程序、报警判断程序、下位机DSP 与上位机通信程序、故障诊断程序、人机界面程序等。
传感器安装部位见图3。
图2异步电动机实时监测及故障诊断系统总程序框图图3传感器安装部位图(1)初始化程序程序在一般的情况下是在上电的时候初始化,还有就是程序跑飞和出现异常时也要初始化,初始化的目的就是把所有用到的标志位、变量回到初始值,以及引脚的分配,配置寄存器写入需要的值,时钟的选择(内部、外部)等一般要在上电时就做好,然后不是特殊需要是不改动的,尽可能不要修改,因为经常性的修改可能使程序发生异常。
(2)A /D 转换程序数据采集使用了DEWETRON 16位数字信号记录仪。
DEWE 数据采集系统搭配相应的传感器可实施测试和分析振动、电压、电流等各种信号,完成实时数据的采集和数据后处理。
本实验中使用压电式加速度传感器、电流互感器和温度传感器。
MAX1270是8通道的12位串行A /D 芯片,模拟输入通道有8个,最大的采样速率可达110bit /s ,支持SPI 协议。
利用TMS320C6713的串口(McBSP )与A /D 转换芯片MAX1270进行A /D 转换,A /D 转换的主程序及中断服务程序如图4所示。
a )A /D主程序b )A /D 中断服务程序图4A /D 转换程序流程图(3)故障诊断子程序异步电动机主要故障分为两大类,分别是电气系统故障和机械系统故障。
电气系统故障主要是指定子绕组故障和转子绕组故障,而机械系统故障主要是指偏心故障和轴承故障,偏心故障会产生不对称的电磁拉力,使定、转自之间产生摩擦,如不及时发现,将导致定转子绝缘下降,最终引起绕组故障。
绕组发生故障的常见原因是绕组绝缘老化、磨损、过热、受潮导致绝缘绕组下降造成绕组相间或匝间短路;轴承发生故障的常见原因有轴承内油脂过多,内摩擦力增大,使滚子的转动发生困难,轴承内缺油或油脂变质,滚动轴承组装不良或游隙不正确,轴承内密封不良或存有杂物等。
绕组发生故障后多表现为相间部位升温,而轴承发生故障后多表现为相间升温和振动异常。
本文以轴承故障为例进行说明。
传感器采集三相电流信号、铁心及绕组多处温度信号和电机的振动信号,然后对信号进行去噪、特征值提取、故障识别,去噪程序采用小波变换,而故障识别采用神经网·12·2011年第2期煤矿机电络来实现。
1)小波包分解对信号去噪步骤a.信号的小波包分解。
选择一个小波并确定分解层数,然后对信号进行小波分解。
b.确定最佳小波包基。
c.小波包分解系数的阈值量化。
对每个小波包分解的系数,选择一个适当的阈值并对其系数进行量化。
d.小波包重构信号。
根据所选取的小波包分解系数及量化处理后的系数,进行信号重构。
2)故障识别Elman 神经网络故障诊断流程图见图5。
图5Elman 神经网络故障诊断流程图(4)人机接口子程序人机界面要完成的功能主要是显示实时数据及控制各功能子画面的任务。
图6为人机接口的组成图6人机接口组成图图。
其工作方式是实时显示传感器采回的数据,正常情况不报警,报警灯不闪烁。
当参数超出设定的阈值时报警,并且报警灯闪烁示警。
(5)DSP 与上位机通信程序DSP 与上位机通信,是为了将实时监测的数据和诊断的结果传回,同时上位机可在Matlab 环境编辑界面,这样监控人员可以远程监视电机的实时运行状态。
SEED-DEC6713采用包括2个McBSP 模块,这两个McBSP 模块的引脚是和McASP (Multichannel Buffered Serial Port )复用的,它为多通道缓冲型串行接口,是一种多功能的同步串行接口,具有很强的可编程能力,可配置多种同步串口标准,实现全双工通信,传输8位数据,最多能实现128个通道的发送与接收。
图7为上位机、DSP 、数据采集卡之间的通信方式框图。
图7上位机、DSP 、数据采集卡之间的通信方式框图3结语针对大中型异步电机,本文提出了一种基于DSP 的实时监测及故障诊断系统,可实现状态检测、数据记录及故障诊断功能,可实现就地故障诊断,亦可将实时监测数据及检测结果同步传给上位机,提高了电动机故障诊断的实时性。
基于DSP 的诊断系统,也可用于其它三相电气设备中,实验结果表明,此系统数据准确,诊断可靠性高。
参考文献:[1]李真芳,苏涛,黄小宇.DSP 程序开发———MATLAB 调试即直接目标代码生成[M ].西安:西安电子科技大学大学出版社,2003.[2]李方慧,王飞,何佩锟.TMS320C6000系列DSPs 原理与应用(第二版)[M ].北京:电子工业出版社,2003.[3]郭存杰,张来斌,王朝晖,等.交流异步电动机故障综合诊断系统的研究[J ].石油机械,2005(10).[4]雷志鹏,宋建成.综采工作面输送设备工况实时监测及故障诊断系统的设计[J ].工矿自动化,2010(7).[5]SPRS186B ,TMS320C6713Floating-Point Digital Signal ProcessorData Sheet [S ].作者简介:刘媛(1985-),女,在读硕士研究生。
研究方向为故障诊断及智能控制。
(收稿日期:2010-12-16;责任编辑:姚克)·22·煤矿机电2011年第2期。