单桨双舵系统水动力性能数值模拟研究
mike2-水动力模块中文教程

被推荐为河流、湖泊、河口和海岸水流的二维仿真模拟工具。
1.3 水动力模块原理1.3.1 控制方程 模型是基于三向不可压缩和Reynolds 值均布的Navier-Stokes 方程,并服从于Boussinesq 假定和静水压力的假定。
二维非恒定浅水方程组为:hS yv h x u h t h =¶¶+¶¶+¶¶ (1-1) ()()202000012a xy sx bx xx xx xy s p hu hu huv h f vh gh t x y x xs s gh x xy hT hT hu S x yh r t t r r r r r ¶¶¶¶¶++=---¶¶¶¶¶¶æö¶¶+--++ç÷¶¶¶èø¶¶++¶¶ (1-2) (1-3)式中:t 为时间;, x y 为笛卡尔坐标系坐标;h 为水位;d 为静止水深;h d h =+为总水深;, u v 分别为, x y 方向上的速度分量;f 是哥氏力系数,2sin f w j =,w 为地球自转角速度,j 为当地纬度;g 为重力加速度;r 为水的密度;xx s 、xy s 、yy s 分别为辐射应力分量;S 为源项;(,)s s u v 为源项水流流速。
字母上带横杠的是平均值。
例如,u 、v 为沿水深平均的流速,由以下公式定义:d d hu u z h -=ò,d d hv v z h-=ò (1-4) ()()S hv hT y hT x y s x s y gh yp h y gh h u f y v h x uv h t v h s yy xy yy yx by sy a +¶¶+¶¶+÷÷øöççè涶+¶¶--+¶¶-¶¶-¶¶--=¶¶+¶¶+¶¶000020212r r t r t r r r h 雷诺纳维耶斯托克斯方程质的各向同性的线性半空问表面上作用一集中力P,在线性变 形体内任何点M的应力分布的弹性理论公式ij T 为水平粘滞应力项,包括粘性力、紊流应力和水平对流,这些量是根据沿水深平均的速度梯度用涡流粘性方程得出的:2xx u T A x ¶=¶,()xy u v T A y x ¶¶=+¶¶,2yy v T A y¶=¶ (1-5) 1.3.2 数值解法(1)空间离散 计算区域的空间离散是用有限体积法(Finite V olume Method ),将该连续统一体细分为不重叠的单元,单元可以是任意形状的多边形,但在这里只考虑三角形和四边形单元。
水下推进器导管前、后段长度对水动力性能的影响

水下推进器导管前、后段长度对水动力性能的影响
李阳;庄国钦;曹俊
【期刊名称】《应用物理》
【年(卷),期】2024(14)4
【摘要】为了提高导管螺旋桨的效率,本文基于SST k-ω模型和运动参考系技术(MRF),采用计算流体力学(CFD)的方法对不同长度的矩形剖面导管螺旋桨式水下推进器的水动力特性进行数值计算与分析。
结果表明:随着导管前端或后端的延长,对于不同的螺旋桨桨叶曲面特征,水动力性能的变化趋势也会有所不同,总体上,导管前端长度的变化对推进器水动力特性的影响比导管后端的大,当导管两端延长相同的长度时,导管螺旋桨的水动力性能与仅延长导管前端时更接近,并且导管前、后端长度存在最优比例。
研究结果能够为导管螺旋桨式水下推进器结构的优化设计提供一定参考。
【总页数】17页(P243-259)
【作者】李阳;庄国钦;曹俊
【作者单位】南昌航空大学飞行器工程学院南昌;福建宏之升钢结构工程有限公司漳州;广西智能鹰机器人集团有限公司柳州
【正文语种】中文
【中图分类】U66
【相关文献】
1.自补偿式水下推进器的设计及其密封和水动力性能研究
2.转子梢部带圆环并嵌入导管内壁凹槽的泵喷推进器水动力性能研究
3.水下桩腿长度对带支腿浮式结构水动力系数的影响分析
4.斜流中水下机器人的导管桨水动力性能研究
5.轮缘推进器外形对水动力性能影响分析
因版权原因,仅展示原文概要,查看原文内容请购买。
舵系的检修(补充内容)
第十三节舵系的检修船舶舵系是实现船舶转向、调头、直航等操纵的船舶航向控制装置,是船舶航行的重要设备。
舵系是由那些将舵机动力传递到舵叶产生舵效的部件和构件组成的,包括固定件——舵杆舵承(上、下舵承)、舵销轴承、舵轴等,及运动件一一舵杆、舵叶和舵销等。
不包括舵机及其操纵系统。
舵系安装在船舶尾部螺旋桨的正后方,有单、双舵系之分。
一般远洋及近海商船为单桨、单舵;客船、军舰及有的内河船舶为双桨、双舵。
舵叶浸在水中,转动舵叶时,舵叶水动力对船舶产生力矩,迫使船舶改变航向或保持直线航行。
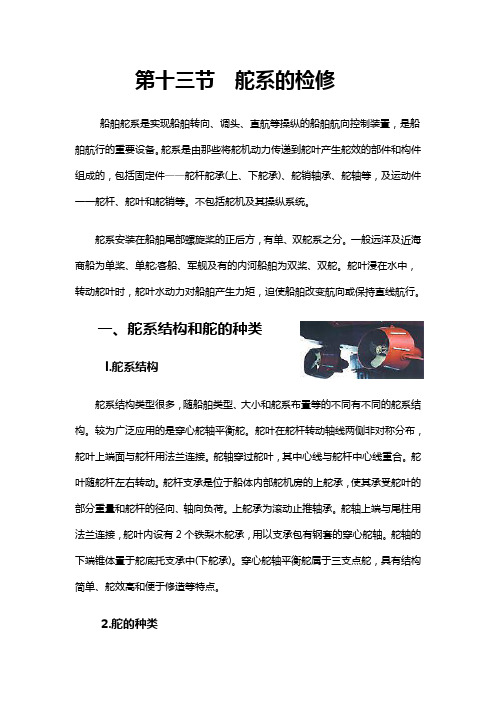
一、舵系结构和舵的种类l.舵系结构舵系结构类型很多,随船舶类型、大小和舵系布置等的不同有不同的舵系结构。
较为广泛应用的是穿心舵轴平衡舵。
舵叶在舵杆转动轴线两侧非对称分布,舵叶上端面与舵杆用法兰连接。
舵轴穿过舵叶,其中心线与舵杆中心线重合。
舵叶随舵杆左右转动。
舵杆支承是位于船体内部舵机房的上舵承,使其承受舵叶的部分重量和舵杆的径向、轴向负荷。
上舵承为滚动止推轴承。
舵轴上端与尾柱用法兰连接,舵叶内设有2个铁梨木舵承,用以支承包有钢套的穿心舵轴。
舵轴的下端锥体置于舵底托支承中(下舵承)。
穿心舵轴平衡舵属于三支点舵,具有结构简单、舵效高和便于修造等特点。
2.舵的种类舵的种类很多,主要有以下几种:1)按舵的旋转轴线位置分为平衡舵、半平衡舵和不平衡舵(1)平衡舵转动轴线在舵叶的中间,把舵叶分为两部分。
舵叶转动时两部分均承受水压产生力矩。
此二力矩方向相反,使转舵力矩降低,在某一舵角时为零,达到完全平衡。
平衡舵所需舵机功率较小。
如图1(a)所示。
(2)半平衡舵仅舵的下半部起平衡作用,如图1(b)所示。
(3)不平衡舵舵的旋转轴线在舵叶的一边,即舵杆一侧有舵叶,对转舵力矩不起平衡作用,如图1(c)所示。
图1 旋转轴线位置不同的舵2)按舵叶截面形状分为平板型舵和流线型舵(1)平板型舵一般用钢板或木板制成,两侧表面可适当加固。
具有便于修造,成本低和舵效差的特点。
舵的工作原理.

一、舵压力
(一)舵压力产生的原理
P
PN PL
PD
PT
O
2018/9/22
1
(二)舵压力、舵压力作用点和转舵力矩
1、舵压力
PN=1/2· g· w · CN· AR· VR²
2、舵压力作用点
e=(0.195+0.305Sin)b
3、舵前缘的转舵力矩
Me=41.35· g· b· AR· VR² · Sin
2018/9/22
8
(二)系泊时舵压力转船力矩 Mpo=PN· la=PN· Cos (Nm) la
G
四、舵效
(一)舵效概念 船舶在各种不同的状态下,用舵设备操纵船舶 所表现的综合效果。 正舵的稳向性;小舵角的保向性; 一般舵角的改向性;大舵角的回转性 当船舶操一舵角时,回转某一角度所需的时间 和纵、横距。
2018/9/22 9
(二)舵效的判断 1、舵效指数
在舵角 一定时,角加速度主要取决于K/T值。 K/T值大,角加速度 就大,舵效就好;反之就 差。 K/T数量上表征每改变1度舵角所能给出的角加 速度量,因此K/T称为舵效指数或应舵指数。
2、诺宾指数
=(K/T)·
P1/2· K’/T’
2018/9/22
6
3、螺旋桨尾流影响
VR=VA+ua=Vs(1-w)+ua
PN=1/2gw·CN· 〔Vs· (1-w) +ua〕² · AR
单桨单舵船船尾舵压力比敞水舵增加2.40~2.58倍 4、滑失的影响
PN=K’S
5、斜流的影响
1.5
实际冲角e= o-( A+)= o · R
小水线面双体船横摇阻尼特性数值与试验研究
小水线面双体船横摇阻尼特性数值与试验研究孙小帅;姚朝帮;叶青【摘要】针对安装稳定鳍的小水线面双体船开展了零速静水自由横摇衰减数值与试验研究.通过不确定度分析验证数值计算方法的可靠性,进而对比船体的线性横摇阻尼和非线性横摇阻尼,并分析摩擦阻尼和稳定鳍对小水线面双体船横摇恢复力矩的影响规律.结果表明:由数值计算求得的自由横摇衰减曲线与试验结果吻合良好;在线性横摇运动假设下,线性横摇阻尼系数随着初始横倾角的增加而增大;将通过数值计算求得的非线性阻尼系数代入到非线性横摇运动方程中能准确地模拟船体的自由横摇衰减运动;摩擦阻尼和稳定鳍对小水线面双体船零速静水自由横摇时的横摇恢复力矩贡献很小.%A SWATH (small waterplane area twin hull) installed with stabilizing fins rolling freely in calm water was investigated by both numerical approach and experimental method.Uncertainty analysis was made to verify and validate the numerical method.Both linear roll damping and nonlinear roll damping were obtained and the contributions of the frictional damping and the stabilizing fins to the roll restoring moment were analyzed.The results illustrate that:the numerical free roll decay curve agrees well with the experiment;under the assumption of linear roll mode,the linear roll damping coefficient sees an upward trend with the increase of initial heel angle;the computed free roll decay curves using nonlinear damping coefficients agree well with the experimental results; the frictional damping and the stabilizing fins make minimal contributions to the roll restoring moment for the free roll decay motion in still water.【期刊名称】《国防科技大学学报》【年(卷),期】2017(039)006【总页数】9页(P71-78,142)【关键词】小水线面双体船;横摇阻尼;自由横摇衰减【作者】孙小帅;姚朝帮;叶青【作者单位】海军工程大学舰船工程系,湖北武汉 430033;海军工程大学舰船工程系,湖北武汉 430033;海军工程大学舰船工程系,湖北武汉 430033【正文语种】中文【中图分类】U661.1船舶在波浪中的横摇运动相比其他自由度的运动呈现出更明显的非线性特征[1],准确预报船舶横摇运动的关键在于求解船舶的非线性横摇阻尼。
MPS方法研究进展及其在船舶水动力学问题中的应用
MPS方法研究进展及其在船舶水动力学问题中的应用陈翔;张友林;万德成【摘要】移动粒子半隐式方法(moving particle semi-implicit, MPS)是基于Lagrangian观点来描述流体的运动,具有能够灵活处理自由面的大幅度变形及物体的运动变形等优点,近年来受到越来越多研究人员的关注.本文对MPS方法的研究进展及其在船舶与海洋工程水动力学问题中的应用现状进行介绍.从计算精度方面,介绍了研究人员为提高压力场的光滑性及稳定性,对粒子间相互作用模型做出的多种改进.从计算效率方面,介绍了提高MPS方法计算速度的主要技术手段,同时从扩展MPS方法在实际水动力学问题中应用范围的角度,介绍了研究人员在数值边界条件和多相流方面做出的贡献.本文回顾了MPS方法在船舶与海洋工程典型水动力学问题中的应用成果,对该方法在数值格式改进、与其他方法耦合及三维复杂实际工程应用方面的发展空间进行了展望.%The moving particle semi-implicit (MPS) method, a recently introduced meshless method based on La-grangian description,has drawn increasing attention from researchers owing to its advantages in handling flows char-acterized by a violent free surface. In this paper,we focus on the development and application of the MPS method to marine hydrodynamic problems. To ensure computational accuracy, we introduce various improvements on the particle interaction model to enhance computation stability and pressure smoothness. We then present some compu-tational acceleration techniques for increasing computational efficiency. To apply the MPS method to hydrodynamic problems,researchers must address a number of issues relating to the boundary conditions and multiphase flow model. We review some of thelatest naval architecture and ocean engineering applications using the MPS method and evaluate its potential developments with respect to its numerical format, combination with other methods, and application to three-dimensional problems.【期刊名称】《哈尔滨工程大学学报》【年(卷),期】2018(039)006【总页数】18页(P955-972)【关键词】无网格粒子法;移动粒子半隐式方法;并行加速技术;重叠粒子技术;多分辨率粒子技术;多相流;流固耦合【作者】陈翔;张友林;万德成【作者单位】上海交通大学船舶海洋与建筑工程学院,上海200240;上海交通大学海洋工程国家重点实验室,上海200240;上海交通大学高新船舶与深海开发装备协同创新中心,上海200240;上海交通大学船舶海洋与建筑工程学院,上海200240;上海交通大学海洋工程国家重点实验室,上海200240;上海交通大学高新船舶与深海开发装备协同创新中心,上海200240;上海交通大学船舶海洋与建筑工程学院,上海200240;上海交通大学海洋工程国家重点实验室,上海200240;上海交通大学高新船舶与深海开发装备协同创新中心,上海200240【正文语种】中文【中图分类】O35;U663移动粒子半隐式法(moving particle semi-implicit, MPS)是一种基于Lagrangian系统描述流场的无网格粒子类方法,采用任意分布的粒子对流场进行空间离散,基于预估-修正(半隐式)的方式来求解流体控制方程,通过核函数表征的相互作用模型实现粒子间质量、动量、压力等信息的传递。
深水Truss Spar水动力计算方法研究
其 特征 尺寸 远小 于波 长 , 波 浪 绕 射 和辐 射 效 应 被 忽略 。对 于这类 结构来 说 , 粘性 就显 得非 常重 要 。 M o r i s o n方 程 本 来 是用 于计 算 固定 圆柱 体 的波 浪
力, 因此 当波浪 作用 在浮 式平 台上 时 , 则 需要 用到 修改 的 Mo r i s o n方程 :
在 浮式平 台主 体结 构 中 , 特 征 尺 寸 较 大 的部 分, 其水 动力 分 析 采 用 绕射 和辐 射 理 论 。特 征 尺
寸 较 大 的 部 分例 如 T r u s s S p a r 平 台 的桁 架 单 元 ,
式 中: 胛、 “ : —— 垂 荡 板 的 特 征 长 度 和 竖 向相 对
Mo r i s o n公 式 1 如下 。
的运 动 性能进 行评 估 , 为平 台前 期设计 提 供参 考 。
1 小 构件 和板 的 波浪 力
1 . 1 o r i s o n公式
F H p =c 。 p 三 五 : + _ 三 _ L c d
速度。
J J ( 2 )
行波浪载荷及运动响应计算 。波浪载荷计算 中 T r u s s S p a r 主体 和软舱采 用 3 D势流理论 计算 , 而垂荡板 、 桁架 和立管系统采用线性化 的 Mo r i s o n 公式 计算 , 同时求解 中考虑 系泊 系统 的影 响。计 算结果 表 明, S p a r 平 台波
第4 2卷
第 1期
船 海 工 程
SHI P & OCEAN ENGI NEERI NG
Vo 1 . 42 No. 1
2 0 1 3年 O 2月
船机桨工况配合特性

△N = Ne- Np= NeH(n/nH)- NeH(n/nH)3 (2) 最大余功的表达式及此时的转速 令: △N = NeH(n/nH)- NeH(n/nH)3 = 0 (对转速n求导)
得到 : NeH - 3NeH(n/nH)2 = 0 ∴ 3(n/nH)2 = 1
之间的函数关系为称柴油机的特性。
5、柴油机特性分类: 柴油机工作参数( Ni, Ne,ηi,ηe,gi, ge,Me等)随转速 n和随平均 有效压力Pe而变化的规律分别叫做柴油机的速度特性、负荷特性、调速特性、 推进特性、万有特性、减额功率输出特性、限制特性等。
第7页/共69页
1) 速度特性(外特性)
可得螺旋桨需要主机功率:
CT KT D4;
Pp
Q 2 np 60
Cp
n
3 p
CQ KQ D5;
Cp 0.1047 CQ n p
第13页/共69页
J1<J2<J3
Pp
J1
J2
J3
Pp Cp n3p
定螺矩螺旋桨的水动力特性
np1 不同 J 时的推进特性
np
第14页/共69页
底、螺旋桨表面损坏等。 上述变化将影响船、机、桨的配合,因此在设计、
管理时必须充分考虑。
第3页/共69页
§6—2 船、机、桨的基本特性
一、船舶航行阻力特性
船体阻力是航速的函数,即:
R AR VSm
PE R VS
式中:R —— 船体的阻力; AR —— 系数; PE —— 船体有效马力;
VS —— 航速;
KT
T
n
2 p
D4
np — 螺旋桨转速; D — 螺旋桨直径;