非完整移动机器人的轨迹跟踪控制
基于滑模变结构的移动机器人轨迹跟踪控制
基于模糊控制的移动机器人视觉反馈跟踪
( 2 )
一
其角度误差和位置误差分别控制其角速 度和线速度 。当角度
误差较大 时,主要快速控制角速度 ,其线速度应控制在一定 范 围内;而 当实 际轨迹点落后于理 想轨迹点 时,应加大移动
机 器 人 的线 速 度 。
L o ol l “ .o o ∞ _
准视觉伺 服反馈的非完整机器人 的镇定和跟踪 问题 已有不少 研究 ,但这些研究对参数要求苛刻 ,而且控制器 结构复杂 。 J 本文在改进以往模 糊控制技 术 的基础上 , 出了不校 提 调参 数下 非完整 控制机 器人 的视觉 反馈 跟踪控 制器设 计方
法 ,包括视觉伺服反馈下 的移动机器人模型及模糊控制器 的
第 卷 第 】期 7 4
V o137 . N O. 4 1
・
计
算
机
工
程
2 1 年 7月 0 1
] D 0 1 u 2 1
Co pu e m tr Eng n e i g i e rn
人 工智 能及识 别 技术 ・
文章编号: o0_2( 11_ 15_ 文献标识码: 1o—3 8 0 ) _ 7—0 4 2 14 0 3 A
计
算
机
工
程
2 1 年 7月 2 01 0日
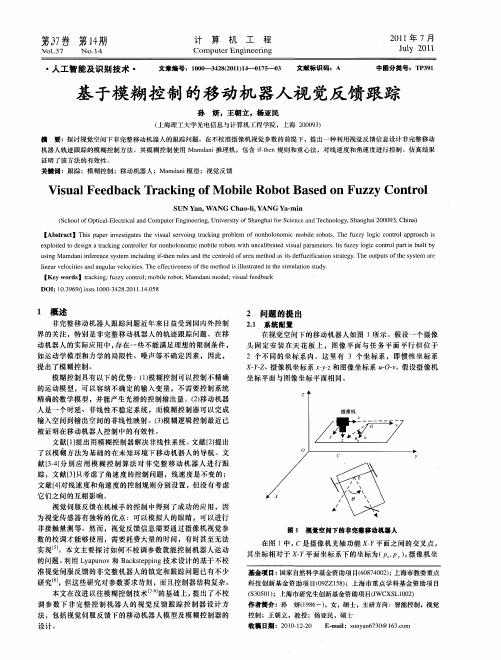
标系 的原点相对图像坐标系 的坐标 ,为( , ) ,移动机器 人的质心在惯性坐标 系下的坐标 是 (,) y 。假定 m 是 X 、Y 、 Y在 图像坐标系下的坐标 。由针孔成像模型得 出:
速度与其实 际轨迹点离所跟踪 的理 想轨迹点 的距离有 关。当 () <0时, ) P() P( 在 切线的右侧 ; 当 () >0时, ) P( 在 P() 切线 的左侧 ;当 () =0时, () P() 在 切线 上。
非完整移动机器人鲁棒控制方法研究

( 2 )
( 3 )
(一) ・( 一 ) 足 嘲 ( 【 )
∞= s() gP 一 ( 豢・n 一 (,) , i c )
。 一
.( 】 s) i n
( 4 )
取
其 :t) 二告 中( : 卫二 g。 P _
, ) (一)制子 > 得 , : 号 , 因, , : ( 控 使
:
( )<0 晋一 。
( 4 )
根据李亚瞢诺夫直接法 ,, I正定 。, I 负定 。 因此满足式( ) 4 的控制输人[r ] 可使系统稳定于莱一 1 r
点。
根 式 2和 ( , . 。 一 ( ) 且 续  ̄l : + 出iI 詈, 据 ( 式 5 知 , 聋 号一 ≤o 连 , i ) ) ≥O r J m o; l,: l 推 mc i m
离呈单调关 系; ③识别的 目 标参考点随环境光照变化及摄像机视点动态变化在 目标的有界区域 内变动。
为此, 设计这类机器人运动控制器实现避障与轨迹跟踪一直受到关注[ 。基于 圆弧轨迹的避 障策略 卜引 满足非完整移动机器人运动特性 , 对非完整轮式机器人有效实现多边形物体避障极 其重要[ 7 目前 3 ] -。 提出的有效实现机器人圆弧轨迹控制的方法有模糊控 制器[ 、 7 神经 网络控制器[ 、 于李亚普诺夫稳 ] B基 J
半径为 尺的圆弧 , 如图中虚弧线所示 。 因此机器人的运动学方程可由式( ) 1 表示。
收稿 日期 : 0 — 2 0 2 5 1 —2 0 作誊简介 : 高庆吉(96 。 。 16 一)男 黑龙江桦 川人 , 哈尔滨工业大学在读博士研究生 . 主要从事研机器人导航控制方 面的研究
维普资讯
1 系统运 动学模 型描述
现代控制理论

现代控制理论⾮线性动态系统的稳定性和鲁棒控制理论研究上世纪50年代,Kallman成功的将状态空间法引⼊到系统控制理论中,从⽽标志着现代控制理论研究的开始。
现代控制理论的研究对象是系统的数学模型,它根据⼈们对系统的性能要求,通过对被控对象进⾏模型分析来设计系统的控制律,从⽽保证闭环系统具有期望的性能。
其中,线性系统理论已经形成⼀套完整的理论体系。
过去⼈们常⽤线性系统理论来处理很多⼯程问题,并在⼀定范围内取得了⽐较满意的效果。
然⽽,这种处理⽅法是以忽略系统中的动态⾮线性因素为代价的。
实际中很多物理系统都具有固有的动态⾮线性特性,如库仑摩擦、饱和、死区、滞环等,这些⾮线性动态⾮线性特性的存在常常使系统的控制性能下降,甚⾄变得不稳定。
这就使得利⽤线性系统理论处理⾮线性动态系统⾯临巨⼤的困难。
此外,在控制系统运⾏过程中,环境的变化或者元件的⽼化,以及外界⼲扰等不确定因素也会造成系统实际参数和标称值之间出现较⼤差别。
因此,基于标称数学模型所设计的控制律⼀般很难达到期望的性能指标,甚⾄会使系统不稳定。
综上所述,研究不确定条件下⾮线性动态系统的鲁棒稳定性及鲁棒控制间题具有重要的理论意义和迫切的实际需要。
⾮线性动态系统是指按确定性规律随时间演化的系统,⼜称动⼒学系统,其理论来源于经典⼒学,⼀般由微分⽅程来描述。
美国数学家Birkhoff[1]发展了法国数学家Poincare在天体⼒学和微分⽅程定性理论⽅⾯的研究,奠定了动态系统理论的基础。
在实际动态系统中,对象往往受到各种各样的不确定的影响,所以其数学模型⼀般不可能精确得到。
因此,我们只能⽤近似的标称数学模型来描述被控对象,并据此来设计控制系统,动态系统鲁棒控制由此产⽣。
所谓鲁棒性就是指系统预期⾮线性动态系统的稳定性和鲁棒控制理论研究的设计品质不因不确定性的存在⽽遭到破坏的特性,鲁棒控制是⾮线性动态系统控制理论研究的⼀个⾮常重要的分⽀。
现代控制理论的发展促进了对动态系统的研究,使它的应⽤从经典⼒学扩⼤到⼀般意义下的系统。
具有参数不确定的移动机器人鲁棒轨迹跟踪控制
20 0 8年 1 1月
东 南 大 学 学 报 (自然科学版 )
J UR AL OF S T A T UN V R I Y ( aua S in eE io ) O N OU HE S I E S T N tr l c c dt n e i
c ran is h sb e t did.Th i e t s a d dy a c lmod l f mo ie r b s a e t k n i t e ti te a e n su e e k n ma i n n mi a c es o b l o ot r a e n o ac u t c o n .The ln a d lwih mac e n e an isi b an d v a i u — t u e d c i e rz — i e mo e t t h d u c r i te so t i e i np tou p tf e ba k ln ai a r t
运 动学和 动力 学方 程 ,首先 采 用 输 入一 出反 馈 线 性化 方 法 得 到具 有 不 确定 性 的 线性 化 模 型 , 输 系统 中的不确 定性 满足 匹配条 件 ;然 后 基 于积 分 滑模 控 制 的 思想 设 计 了鲁 棒 轨迹 跟 踪 控制 器 ,
保证 了系统在 整个 响应 过程 中的鲁棒性 ,并且分 析 了参 数 不确 定对 控 制器 的影 响 ,给 出 了一个 闭环 系统稳定 的充 分条 件 ;最后 对 系统具 有较 大 的参数 摄 动进 行 了仿 真试 验 ,结果 表 明所 设计 的控制器 能够 保证 移 动机器 人有 效性地 跟 踪期望 轨迹 . 关键 词 : 动机器 人 ; 移 轨迹 跟踪 ; 数不确 定 ; 参 积分 滑模控 制
非完整轮式移动机器人轨迹跟踪控制研究
考虑到机器人运动过程的动力学特性, 如果系统误差比较大, 控制律所产生的控制量
( c , c ) 有可能超出系统的最大速度( max, max ) 或系统的加速度超出系统允许范围( max ,
第3期
非完整轮式移动机器人轨迹跟踪控制 研究
37 9
max ) , 并且系统的速度或加速度太大将会引起机器人运动打滑, 为此, 在控制律中引入如下 控制策略, 从而保证机器人运动平滑.
a1 f ( k c ) ye , e 0. 取 Lyapunov 函数
V=
1 2
x
2 e
+
1 2
y
2 e
+
2 ay
1-
cos
e
2
( 5)
由于 ay > 0, 很明显 V ! 0, 当且仅当( x e , y e , e ) T = 0, V = 0( e ∀ [ - !, !) ) .
由( 4) 式和( 3) 式得:
c
otherw ise
3 实验分析
为了验证算法的有效性, 基于 MATLAB 对算法进行了仿真研究, 仿真过程中, 控制律的 参数选择十分重要, 参数 k 将影响双曲正切函数的平滑程度, 如果 k 值越大则f ∃( k c ) 更快 趋于零, f ( k c) 趋近于 % 1, 从控制律式( 7) 可以发现控制器的调节将变得非常简单. a1, ax 一般改变x 方向误差, ay 改变y 方向误差, a 改变角度误差, 虽然原理上只要 a1 、ax 、ay 、a 均为大于零, 都能保证系统收敛稳定, 但是, 太大的系数会使系统运动振荡较大, 系数太小会 使系统误差收敛速度变慢, 误差调节过程中参数间又是互相影响的. 试验中系统控制参数 ( a1, ax , ay , a , k ) 取为( 1, 2, 0. 2, 2, 5) . 为了保证机器人运动平滑, 我们选取
轮式移动机器人轨迹跟踪控制的特点与方法
1、前 言
由于具有操作快捷 、 控制简单 , 并且节省能量等特点 , 轮式移动 机器人成为了用途最广泛的一类移动机器人 。 近些年来对轮式移动 机器人的研 究越 来越得到关注。 轮式移动机器 人控制的两个主要 问 题是 : 轨迹跟踪控制和点稳定控制。 虽然点稳定控制 问题在理论上 很难解 决 , 但是在实践 中的应用并不广泛 。 式移动机器人 的控制 轮 算法通常是在一个预先设定好的无障碍的路径 的基础上 工作 的。 因 此, 在实 际上轨迹跟踪控制 问题得到 了广泛的关注 。 移动机器人 的 轨迹跟踪控 制问题是控制机器 人跟踪一个 给定 的、 时变的轨迹。 一 般来说 , 目的是使机器 人能够在每一个采样周期上 以特定的姿态 其
控制算法 。 出的离散控制算法克服了以往的基于时间连续模型所 提 设计的连续控制器在数字控制器上执行所 需的小采样周 期的问题。 22动 力 学轨迹 跟踪 控 制 . 在机器人速度较低且载重不大 的情 况下, 基于运动学模型设计 的控制策略可以得到 比较满意 的控制效果 。 然而在机器人高速 的运 动或高负重运动 的情况下 , 只考虑运动学问题而忽略 了动力学方程 中的系统质量和惯性 会使得控制效果不理想 。 因此 , 在这种情况下 在移动机器人 的轨迹 跟踪控制 中基于动力学方程设计的控制器会 取得 更好 的控 制效果。 文献【提 出了一种 自适应 非线性控制器 , 3 ] 并 且通过实验验证 了该控制方法 的有效性 。 在文献[] 4中一种指数滑模 控制 方法 被提 出, 该方法具有很好 的鲁棒性 。 23移 动机 器人轨 迹跟 踪控 制 中常 见 的 问题 . 以上提出的控制方法大都是基 于理想情况所设计的。 但是在实 际中往往不能满足此理想情况。 些时候特别是当载重运输时 , 有 机器
车式移动机器人系统的轨迹跟踪控制【开题报告】
毕业设计开题报告电气工程及自动化车式移动机器人系统的轨迹跟踪控制一、选题的背景与意义近年来,机器人的应用越来越广泛,从原来单一的制造业,逐渐拓展到像医疗、家务、娱乐等非制造业和服务行业。
它的出现有力的推动了科技的进步和社会经济的发展,带给人们巨大的经济财富。
机器人技术是在新技术革命中迅速发展起来的一门新兴学科,是人类最伟大的发明之一,其研究一直是国内外极为重视的高技术领域,各国的研究机构已经根据需要研制出多种不同用途的机器人。
移动机器人是机器人学中的一个重要分支,具有重要的军用和民用价值。
机器人分类有多种,按控制方式或自主水平来分,分为遥控式移动机器人、半自主式移动机器人和自主式移动机器人;按移动机构的结构来分,分为车式移动机器人、履带式移动机器人和步行式移动机器人。
其中,车式移动机器人(WMR)具有速度快、运动稳定以及能源利用率高等特点。
因此具有很高的使用价值和广泛的应用前景,目前正在向工程实用化方向迅速发展,也是目前智能机器人技术发展的主要方向之一。
本课题主要研究车式移动机器人的轨迹控制问题。
二、研究的基本内容与拟解决的主要问题:基本内容:分析车式移动机器人系统的轨迹跟踪问题。
基于运动学模型分析,提出一种自适应的轨迹跟踪控制方法。
通过引入状态反馈实现系统的镇定,所使用的控制方法能够使四轮车式移动机器人在导航中具有理想的跟踪轨迹(直线和圆周两种轨迹)。
拟解决的主要问题:(1)机器人运动学模型的建立(2)自适应轨迹跟踪控制问题(3)最优控制器的设计(4)实现一定的抗干扰能力三、研究的方法与技术路线:技术路线:采用滑模变结构实现对移动机器人的轨迹跟踪控制。
滑模变结构控制是根据系统所期望的动态特性来设计系统的切换超平面,通过滑动模态控制器使系统状态从超平面之外向切换超平面收束。
系统一旦到达切换超平面,控制作用将保证系统沿切换超平面到达系统原点,这一沿切换超平面向原点滑动的过程称为滑模控制。
由于系统的特性和参数只取决于设计的切换超平面而与外界干扰没有关系,所以滑模变结构控制具有很强的鲁棒性,对非线性系统的控制具有良好的控制效果。
基于引导角的轮式移动机器人轨迹跟踪控制
2.1 动 力学层 次 轮式 机器 人轨 迹 跟踪 控 制法 在 传 统轮 式 机器 人 轨迹 跟踪 控 制方 法 中 ,多 数研 究人 员 都是 在
简单 运 行轨 迹 以及 运 动模 型 的基 础 上对 其进 行 研 究的 ,这 种方 式 将 复杂 的 运动 环 境 简单 化 ,虽 然具 有 较 强的 理论 研 究意 义 ,但是 在 实 践方 面 存在 一 定 的局 限性 ,针对 这 一现 象 ,最 有效 的解 决 办法 就 是 在动 力 学 的基 础 上对 轮式 机 器人 的轨迹 跟 踪控 制方 法 进行 研 究 。在
ELECTRONICS WORLD ·淼 动机 器 人 轨 迹 跟 踪 控 制
德 州职 业技 术 学院 许 艳梅
【摘要 】轮式移动机 器人是一种典型的非完整 系统,其 系统模型十分复杂。在建立移动机器人模型之后,还要根据侧 向误差和角度来设计出 引导角,然后将 引导角作为虚拟输入 ,根据其轨迹运动规律结合相应参数 ,选取一定的条件 ,从而得到机 器人的运动情况,这就能总结出机 器人 合 理 的运 动规律 。这 项 实验 对 于机 器人 研 究有 着重 要作 用 , 因此本 文就 耍进 行详 细探 讨 ,希 望 能有 相 关工作 人 员提供 一 些建 议 。 【关键词 】引导角;轮式移动机 器人 ;轨迹跟踪控制
前 言
随 着 科 技 的发 展 ,机 器 人 领 域 也 取 得 了较 大 的 进 步 , 机器 人 同样 也 走进 了人们 的 生活 。其 中轮式 移动 机 器人 中的运 动 系统 是人 们 关注 的 重 点 问题 ,轮 式机 器人 应 用系 统是 典 型 的非完 整 系统 ,机 器 人在 不 同路 径 之下 ,采 用 的移 动 方式 也不 一样 ,在对 机 器人 进 行 运 动控 制 的过 程 中 ,不仅 需 要对 空 间位置 进 行控 制 , 同样 还需 要对 运 行 时间 进行 控 制 ,也就 是 将 引导角 应用 在 机器 人 的轨 迹跟 踪 系 统 中,将 侧 向误 差 以及 角度 误 差之 间 的关 系应 用在 其 中 ,对 跟踪 控制 器 进行 设 计 的同时 , 实现对 机 器人 的全 面跟 踪 。
非完整移动机器人的轨迹跟踪控制研究
或连 续的 时不变状 态反馈 来实 现轨迹 跟踪 控制 .使得 不连续 的 滑模跟踪 控制方 法更具 吸引力 反演[ 3 ] 是近 年 来发 展的一 种非线性 系统 稳定设 计理 论 .是将 复杂 的 非线性 系统分解 为不 超过 系统 阶数 的子系统 .然 后为 每 个 子 系 统 分 别设 计 中 间虚 拟 控 制 量 和 la u yp 肋v函 数 , 直后 退到整个 系统 。 一 完成控 制器 的设计 。 本 文在 文 献f1 文献 f1 3和 5的基 础上 , 于反 演 控 制 基
的运 动方 向 . 机器n 十 2 导 5 )
() 6
=
(—c]]1 差sn差 ) ]O 三 = ; ls( e oO s i
3 仿真试验 、
为 了验证方 法 的有效 性 和全局 性收 敛 .分 别对 直
线和 曲线 进行轨 迹 。取采样 时 间为T lt ,= ,,3 = O sa l k= , u k= ,= . 。图一 为直线跟 踪 , 中v ,t , 23 o 0 2 r 0 其 lW= 初始位 0
1 移 动 机 器 人 轨 迹 跟 踪 问题 描 述 、
+
+sn i
移 动 机器 人 的状 态 由两个 驱 动 轮 的轴 中 点M在 坐
-
( + 。 口 l一sna,n ) 4 一 cs l ag() s ( + ∞ i ev i )
-) 2 cs o o +
标 系的 位置 及航 向0 表示 , =x O q ( , 中 来 / ( ) =v 其 @p y , ( ) 移 动机器人 的位 置 ,为移 动机器 人前进 方 向与X x为 v 0 轴 的 夹 角 . ‘分别 为移 动 机 器 人 的 线 速 度 和 角 速 和 1 )
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
值有关的有界正的常数
对
采用上述设计 使得
指数收敛于
零 此时系统 中其它状态组成的子系统为
令
则有
取
此时控制输入为 和 可看成是施加在非完整移 动机器人的广义力或广义力矩
对系统 采用与式 相同的坐标变换 整 理得
其中
则有
定理 在假设 和假设 下 当 有界 且 时 控制律 和 使得系统
态一致有界且满足状态指数收敛 证明与定理 的证明过程类似 此略
第 卷第 期
控制与决策
年月
文章编号
非完整移动机器人的轨迹跟踪控制
李世华 田玉平
东南大学 自动控制系 江苏 南京
摘 要 讨论基于运动学模型的非完整移动机器人的轨迹跟踪控制问题 在一定的假设条件下实现了
全局指数跟踪 该假设允许参考模型角速度和平移速度均趋于零 并将该方法推广到动力学模型 仿真
例子证明了该方法的有效性
9.李世华,田玉平 移动小车的轨迹跟踪控制[期刊论文]-控制与决策 2000(5)
本文读者也读过(3条) 1. 王仲民.岳宏.刘继岩.WANG Zhong-min.YUE Hong.LIU Ji-yan 轮式移动机器人轨迹跟踪控制[期刊论文]-太原 理工大学学报2005,36(4) 2. 徐俊艳.张培仁 非完整轮式移动机器人轨迹跟踪控制研究[期刊论文]-中国科学技术大学学报2004,34(3) 3. 董文杰.霍伟.DONG Wenjie.HUO Wei 受非完整约束移动机器人的跟踪控制[期刊论文]-自动化学报2000,26(1)
关键词 移动机器人 轨迹跟踪 非完整系统 运动学模型 动力学模型
中图分类号
文献标识码
引言
近年来 非完整控制系统已成为机械控制系统 研究的一个热点 作为一类典型的非完整系统 移动 机器人的镇定问题引起人们的广泛关注 相对而 言 对非完整移动机器人的跟踪问题研究得则较少 根据参考轨迹是否为时间的函数 跟踪控制可分为 路径跟踪和轨迹跟踪 一般说 对后者的研究要困难 得多 本文主要研究移动机器人的轨迹跟踪控制问 题
进的方法是
提出的一维动态跟踪控制器方法
由此得到的闭环系统无奇异点且为全局跟踪 但该
方 法要求参考模型角速度不趋于零
利用
直接方法和积分
方法 可对
移动机器人以及更一般的模型链式系统进行全局跟
收稿日期
修回日期
基金项目 国家自然科学基金项目
国家攀登计划预选项目
作者简介 李世华
男 江西萍乡人 讲师 博士 从事机器人控制 系统辨识 智能控制等研究 田玉平
控制与决策 CONTROL AND DECISION 2002,17(3) 45次
参考文献(9条) 1.Kolmanovsky I;McClamroch N H Developments in nonholonomic control problem 1995(06) 2.Tian Yu-Ping;Li Shihua Smooth Exponential Stabilization of Nonholonomic Systems via Time-varying Feedback 2000 3.Kanayama Y;Kimura Y;Miyazaki F A stable tracking control method for an autonomous mobile robot 1990 4.D Andrea-Novel B;Campion G;Bastin G Control of nonholonomic wheeled mobile robots by state feedback linearization 1995(06)
中状
仿真结果
设计 使得 此处不妨取
收敛于零并使
选取参考输入 此时参考模型轨迹为
则有
因此
相应有
注意
图 跟踪误差曲线
图 控制量变化曲线
图 平面跟踪轨迹
第期
有界
和
取初值
采用控制律 和
李世华等 非完整移动机器人的轨迹跟踪控制 趋于零
即 这里
选取参数
仿真结果如图 图 所示 由图 可以看出 系统轨迹最终跟踪参考轨 迹收敛到原点 实现了逼近参考轨迹基础上的镇定
男 安徽马鞍山人 教授 博士生导师 从事复杂系统控制 鲁棒控制 混沌控制 机器人控制等研究
控
制
与
决
策
第卷
踪控制 条件是参考模型的平移速度和角速度最多 只能有一个趋于零 将终端滑动模态方法应用于 移动机器人的跟踪控制 使得对角速度不为零的参 考模型 移动机器人在有限时间内完全跟踪
综上所述 已有的非完整移动机器人全局跟踪 方法或有奇异点 或无法适用于参考模型角速度趋 于零或角速度与平移速度均趋于零的情况 跟踪问 题还有许多难点未解决 本文以非完整移动机器人 运动学模型为对象 对其全局跟踪问题进行研究 对 满足一定条件的参考模型可以实现全局指数跟踪 其中包括参考模型角速度和平移速度均趋于零这类 情况 并将该方法推广到动力学模型 仿真例子证明 了该方法的有效性
时趋于零但
在
不过零的
而另一部分为允许过零
但
时不趋于零的有界信号
因为 不
过零 这样可以利用一种 除法 的坐标变换从
中除 去
由于剩下的 信号不趋于
零 当其满足假设 时 可以从中提取出有用分量
进行控制 而当
不趋于零时
可看成是常
数 只要
信号满足假设 同样可以采用该方
法
对系统 采用坐标变换
整理得
第期 对给定的
时
亦为一致有界且指数
趋于零 利用式 坐标变换的反变换 易得系统
一致跟踪系统 且跟踪误差指数收敛到零
注 对跟踪控制律 和
采用坐标变
换的反变换 即可得到关于原系统坐标描述的控
制律 此略
动力学情况
考 虑非完整移动机器人的动力学简化情况 即
系统 加上两个积分器
其中 和 为与初值
和
有关的常数
由此推出
其中 为某个与初
5.董文杰,霍伟 受非完整约束移动机器人的跟踪控制[期刊论文]-自动化学报 2000(1) 6.董文杰,霍伟 链式系统的轨迹跟踪控制[期刊论文]-自动化学报 2000(3)
7.Jiang Z P;Nijmeijer H Tracking control of mobile robots:A case study in backstepping 1997(07) 8.Jiang Z P;Nijmeijer H A recursive technique for tracking control of nonholonomic systems in chained form 1999(02)
参考文献
董文杰 霍伟 受非完整约束移动机器人的跟踪控制 自动化学报
董文杰 霍伟 链式系统的轨迹跟踪控制 报
自动化学
李世华 田玉平 移动小车的轨迹跟踪控制 决策
控制与
上接第 页 参考文献
非完整移动机器人的轨迹跟踪控制
作者: 作者单位: 刊名:
英文刊名: 年,卷(期): 被引用次数:
李世华, 田玉平 东南大学,自动控制系,江苏,南京,210096
7.张立立 非完整系统的跟踪控制[学位论文]硕士 2009
8.赵毅红,朱剑英 基于综合导向的车式移动机器人轨迹跟踪控制[期刊论文]-华南理工大学学报(自然科学版)
2006(11)
9.李胜,马国梁,胡维礼 基于Backstepping方法的车式移动机器人轨迹追踪控制[期刊论文]-东南大学学报(自然
科学版) 2005(02)
结
论
本文对基于运动学模型的非完整移动机器人的 全局跟踪问题进行研究 对满足假设的一类参考模 型可实现全局指数跟踪 尤其是对参考轨迹趋于静 止的情况 对参考轨迹的成功跟踪相当于实现了在 逼近给定轨迹基础上的镇定问题 仿真例子证明了 该方法的有效性 目前 本文方法只考虑了低阶非完 整系统的轨迹跟踪问题 高阶情况将是今后进一步 研究的课题
移动机器人模型及跟踪问题描述
本文研究对象为非完整移动机器人 其动力学 特性由下列微分方程描述
其中 和 分别为移动机器人的平移速度和转动速
度
为机器人质心的笛卡儿坐标描述 为其
前进方向与 轴的夹角 对式 进行坐标与控制输
入变换 可得如下三阶链式模型
此时得到相应的跟踪误差模型
跟踪问题描述为 寻找控制律
和
使
10.刘海涛,黄敏,朱启兵 一种新的二叉树SVM 多分类算法[期刊论文]-江南大学学报(自然科学版) 2009(02) 11.李世华,田玉平 非完整移动机器人的有限时间跟踪控制算法研究[期刊论文]-控制与决策 2005(07)
12.廉春原 移动机器人的运动控制系统研究[学位论文]硕士 2009
13.钟新华,蔡自兴,邹小兵 基于ADT850的移动机器人运动控制系统设计[期刊论文]-电光与控制 2004(04) 14.欧阳鑫玉,杨曙光 基于势场栅格法的移动机器人避障路径规划[期刊论文]-控制工程 2014(01)
时可以趋
于零 这两个假设使得本文方法与
等文献的
方 法截然不同 根据假设 对任意
易证必有
且当 趋于零时 必有
假设 实际上限制了被跟踪轨迹趋于零的速率不能
比指数收敛更快 因为我们所设计的系统 其状态是
指数收敛的
注 假设 意味着当
时
不趋于
零 因为若
则不可能找到一个常
数
使得式 满足 而式 意味着
中可
由一个正分量 来逼近 随着时间增长 逼近的累计
得对任意初始跟踪误差
闭
环系统轨迹一致有界并收敛于零
跟踪控制律设计
运动学情况
本文对式 系统作如下假设
假设
这里对任意