非完整轮式移动机器人轨迹跟踪控制
非完整式移动机器人的路径跟踪控制
控 制器 进 行 串 口通信 。
运 动 学 模 型 分 析
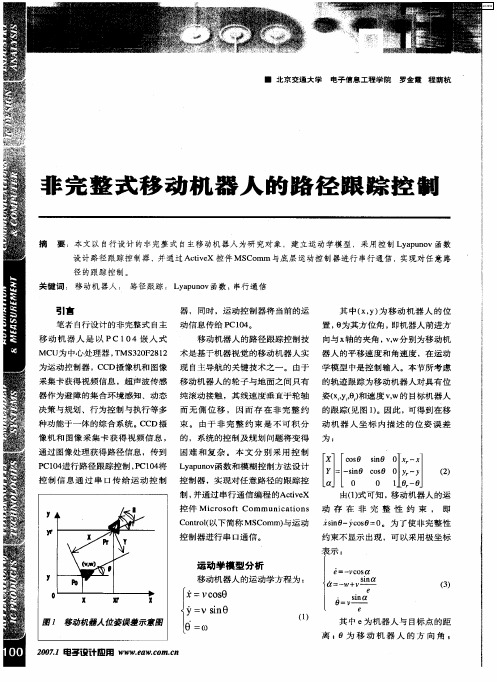
移 动 机 器 人 的运 动 学方 程 为 :
、 -+.a {=wvn 6 t 一 s i
I :
L e
其 中 e为 机 器 人 与 目标 点 的距
离; 0为 移 动 机 器 人 的 方 向 角 。
20. 07 1电 子设 计 腰 用 ww e wc m.n w. . a o c
① V( ) 正 定 的 、 径 向无 界 x为
的。
Po t i r ”; r l e!) Fa u
| 辑 C M1 | 逡 、 O
r n
. .
J
m
_
M SCom m . e I S t nBuf e Si e fr z
MS o C mm . t p t ; Gel u O n
决 策 与 规划 、行 为控 制 与执 行 等 多 而 无 侧 位 移 , 因 而 存 在 非 完 整 约
种 功 能 于一 体 的 综 合 系 统 。CC D摄 束 。 由于 非 完 整 约 束 是 不 可 积 分 像 机 和 图像 采 集 卡 获 得 视 频 信 息 , 的 ,系统 的控 制 及规 划 问题 将 变 得
(0 4 ;/ 收 缓 冲 区 1 2 )/接
m
. .
,先 预 读 缓 冲 区 以清 除残 留数 /
据
② 在 每 个非零 X处 ,都存在
M SC om m . Set ut uf e O B fr
L - F o
/如果 串口是打开的则关闭串 口 /
{
m
_
AL E) S ;
.
{
Af M e s g Bo (Op n S ra x sa e x ” e e il
非完整移动机器人轨迹跟踪自适应控制器设计

在 轮 式 机 器 人 运 动 控 制 理 论 中 , 般 假 设 车 轮 与 地 面 一 为点 接 触 , 且 , 触 点 处 只 有 纯 滚 动 而 不 发 生 相 对 滑 动 并 接
题, 构造 了具有全局渐近稳定 的 自适应轨迹跟踪控制器 , 实
现 对 预 定 轨迹 的全 局 渐 近 跟 踪 , 在 Maa 境 下 验 证 了 并 l f b环 其 有 效 性 和 正确 性 。
14 0 ห้องสมุดไป่ตู้
传感器与微系统 ( rndcr n coyt eh o g s Tasue dMi ss m Tc nl i ) a r e oe
21 年 第 3 01 O卷 第 5期
非 完 整 移 动 机 器 人 轨 迹 跟 踪 自适 应 控 制 器 设 计
李会 来 ,李 小民 ,陈静 华
现了移动机器人对直线和椭圆 2种轨迹追踪 的仿真实 验。实验表明 : 该控 制方法在轨迹 跟踪控制 中有较 好 的航 向跟踪效果 , 对机器人非完整 系统模型 的非线性 特性 表现出良好 的有效性和 自适应性。 关键 词 :移动机器人 ; 非完整 系统 ;自适 应控 制 ; 反演
中 图 分 类 号 :T 7 P2 3 文 献 标 识 码 :A 文章 编 号 :10 -7 7 2 1 )50 0 -3 00 98 ( 0 1 0 -14 0
不确定非完整轮式移动机器人的运动控制研究

不确定非完整轮式移动机器人的运动控制研究非完整轮式移动机器人(wheeled mobile robot,WMR)是典型的多输入多输出耦合欠驱动非线性系统, 其运动控制问题极具挑战性。
轮式移动机器人大多工作在复杂未知环境之下, 容易受到多种不确定性和扰动的综合影响, 因此, 解决复杂不确定下非完整轮式移动机器人的运动控制问题意义深刻且现实需求迫切。
本文研究了轮式机器人包含定位不确定性、参数和非参数不确定性、侧滑和打滑干扰等情形下的运动控制策略, 探讨了非完整单链系统的有限时间控制以及力矩受限下轮式移动机器人的动力学控制。
主要的研究成果包括: (1)研究了定位不确定的轮式移动机器人路径跟随问题, 提出一种基于改进遗传算法优化自适应扩展卡尔曼滤波的全局一致渐进稳定控制器。
(2)提出了一类n维不确定非完整单链系统的鲁棒有限时间镇定控制律。
通过不连续变换将原系统分解为1阶和n-1阶两个解耦的独立子系统, 对1阶子系统采用分段控制策略解决不连续变换引起n-1阶子系统奇异问题, 保证控制律的全局性, 对n-1阶子系统采用反演(backstepping)设计方法, 降低设计复杂度, 设计过程基于有限时间Lyapunov理论, 保证系统的有限时间稳定。
(3)研究了本体动力学模型包含参数和非参数不确定性的轮式移动机器人轨迹跟踪问题, 提出基于自适应反演滑模控制的全局渐进稳定饱和控制方案。
通过运动学输入-输出非线性反馈和动力学输入变换, 建立包含系统总体不确定性项的线性模型, 采用一种动态调整机制实现控制输入饱和约束, 基于幂次趋近律提高了滑模控制的平滑性和快速性, 自适应估计总体不确定性的上界有效削弱了滑模控制的抖振现象。
(4)提出了执行器动力学模型包含参数和非参数不确定性的轮式移动机器人轨迹跟踪与镇定统一控制方法。
通过backstepping分别设计系统的运动学、本体动力学和执行器动力学控制器, 运动学控制器引入了时变控制量, 使跟踪误差模型用于镇定控制时不存在奇异, 本体和执行器动力学控制器分别采用带鲁棒项的强化学习自适应模糊控制补偿系统的复杂不确定性, 采用非线性跟踪-微分器避免了backstepping过程的“计算膨胀”, 闭环系统为最终一致有界收敛。
受非完整性约束的移动机器人路径跟踪算法

Pa h f lo ng a g r t m o o ie r b t t o - o o m i o s r i t t - o l wi l o ih f r m b l o o s wih n n h l no c c n t a n s
YU n Ka g , XI O n x a A Be - i n , LIYa - o g nh n
( . h o fElcrcEn i e ig a d Autma in,H ee Uniest fTehn lg 1 Sc o lo eti gne rn n o to fi v riy o c oo y,H ee 3 0 ,Chn fi2 0 09 ia;2 De t o hy is . p . fP sc ,Xin a
受 非 完 整 性 约 束 的移 动 机 器 人 路 径 跟 踪 算 法
郁
摘
伉 肖本 贤 李艳红 , ,
20 0 ;2 成 阳师范学院 物理系 , 309 . 陕西 咸 阳 7 20 ) 10 0
(. 1合肥工业 大学 电气与 自动化工程学院 , 安徽 合肥
要: 文章讨论 了受 非完 整约束限制的两轮差动驱动机器人 的路径 跟踪 问题 , 究移 动机器人在 一个运动 研
h ln mi cn tan s ysu yn h aet r f o o mo inp r da df dn u h ea oo o c o srit.B td igt et jco yo b tna t ei n i igo t erl— r r i o o n t
基于自适应反步法的轮式移动机器人跟踪控制

当闭环 系统对性 能要求 比较高时 , 动力学描 述是不可忽视 其
的 。另外 , 于运 动学 模型的速度控 制律 不能直接 应用于输 基
十分复杂 。因其不满 足 Bokt必要 性条件 , 得光 滑 的状 rcet 使
态反馈控制律无 能为力 。于是 研究人 员针 对具 有重要 工 程 意义 的非完整移动机 器人 的跟踪 控制 提 出各种 控制方 法来 克服这一缺陷 。根据 系统是 由运动学 模 型或动力 学模 型来 描述 , 可将跟 踪控 制问题划分为运动学跟 踪或者动力 学跟踪 问题 。运动学跟踪 问题 近年来 已被 广泛研 究 。一 些学 者借 助线性控制理论 或反馈线性化 的方法 进行研究 , 包括 基于线 性化方法 为非 完 整 轮式 移 动 机 器 人提 出 了一 种 局部 控 制 器… , 于线性化模型 提出 了连 续 的线性 局部 指数 控制 器 , 基 基于动力学反馈 线性化 方法 和微 分平面 思想 提 出带有奇 异
1 引言
近年来 , 非完整移动机器人 的运 动控制一直 是人们研 究 的热 点。机器人是 一个 十分 复杂 多变 的多输 入多输 出 的非 线性 系统 , 具有强耦合 、 时变 和非 线性 的动 力学特性 , 其控 制
动力学 系统 跟踪问题在最近几年受到 越来越 多的关注 , 原 因之一是大 多数实 际的非完整机械系统 都是动力 学系统 。
控制器 , 有效解决了不确定非完整轮式移动机器人 动力学系统的轨迹跟 踪问题 。仿真结果证 明该方法 的正确性和有效性 。
关键词 : 移动机器人 ; 非完整约束 ; 自适应反步 ; 跟踪控制
中图 分 类 号 :P1 _ 3 r 文 献 标 识 码 : A
Ada i e Ba kse pi g Tr c i g Co t o fW he ld M o ie Ro t ptv c t p n a k n n r lo ee b l bo
轮式移动机器人轨迹跟踪控制方法

j Y =一 ( , 一 ) s i n 0 +( Y 一 Y ) c o s 0
【
收 稿 日期 : 2 0 1 3 — 1 2 — 1 9
( 3 )
0 = 0 , 一0
作者简介 : 吴 忠伟( 1 9 8 5 一 ) , 女, 山东 日照人 , 助教 , 硕士, 主要从事计算机控制方 面的研 究。
( V r O . ) , ) 来表示 。从位置p移动到 目标位置 p 产生了一个新 的坐标系 X 一 , 令移动机器人的坐标为
其中 0 。 = 0 一0 。设 新 坐标 系 一 与 坐标 系 —l , 之 间 的夹角 即为 0 。利用 坐标 变换 得 到 :
r =( , 一 ) c o s 0+( Y 一 Y ) s i n 0
摘
电气信息 系 ,长春
1 3 0 1 1 1 )
, , ∞ C , . . .
要: 针 对 轮 式 移 动 机 器人 轨 迹 跟 踪 这 一 典 型控 制 任 务 , 提 出 了基 于模 糊 控 制 规 则 的 滑 模 控 制 方 法 。 该 方 法 采
用等速趋 近律 , 利用连续 函数代替符号 函数获得切换控 制律 , 最后运 用 L y a p u n o v理论 证明 系统的稳 定性。仿 真结 果表 明该方法不但 能够有效的跟踪机器人的参考轨迹 , 还 能有效的减少在控 制 中的抖振 现 象。即使存 在外界 干扰
神 经预 测控 制方 法实 现 四轮移 动机 器人 的轨 迹 跟踪 ; 在 实 际 的控 制 系 统 中往 往 会 存 在 不 确定 的外 界 干 扰 。 由于滑模 控 制器设 计 简单 、 鲁棒 性较 强等 优点 , 在解 决非 线性 系统 问题 上具 有 良好 的控 制 效果 。 本 文在 考虑 轮式 移动 机器 人模 型 的基 础 上 , 设 计具 有 渐近 稳定 性 的滑模 控 制 律 。利 用 连续 函数 替代 符 号 函数 的方 式消 除抖 振现 象 。通过 机器 人给 定 的圆形轨 迹 的跟 踪仿 真 , 证 明该控 制方 法 的有效 性 。
基于RBF神经网络的轮式移动机器人轨迹跟踪控制

燕 徐 云 龙 ,
(.金 陵科 技 学 院 信 息技 术 学院 ,江 苏 南京 2 16 ; 2 1 11 9 .南京理 工 大 学 自动化 学院 ,江 苏 南京 2 0 9 ) 10 4
摘 要 : 对 一类 非完整 移动机 器人 的轨 迹跟 踪控 制 系统 , 出一种 基 于 R F神 经 网络 的滑模 控制 与转 矩控 制相 结合 的智 针 提 B
c mb n t n o l i g mo ec n r l n r u o t l a e n RBF n u a ewo k d c n r 1 Co sd r g b t i e t n y a o i ai f i n - d o to dt q e c n r s d o o sd a o o b e rl t r e o t . n o n i e i oh k n mai a dd n — n c m ia d l t eRBF n u a e o k a n t ep o e so mo i b t o in, a d c n t u e r u o to lrc mb n d wi e cl mo e , h e l t r sl r r c s f b l r o t r nw e h eo m o n o si t sat q ec n l o i e t t t o r e h h s e d er r T e n f r y u t t l s m p o i tb l y o t eco e o ro se c rb b an d Th tb l y o e t ec o e p e ro . h i ml l ma ey a y t t s i t f l s d l p e r rs t m al eo t i e . u o i c a i h o y e s i t f n i l s d a i r l o y tm r v db y p n v s b l y t e r . Th i l t n r s l e n tae t a i c n o tae y h sg o b sn s . o p s se i p o e y L a u o t i t o s a i h y esmu ai u t d mo sr t t s o t l r tg a o dr u t e s o e s h t r s h o
具有不完整约束的轮式移动机器人的串级跟踪控制
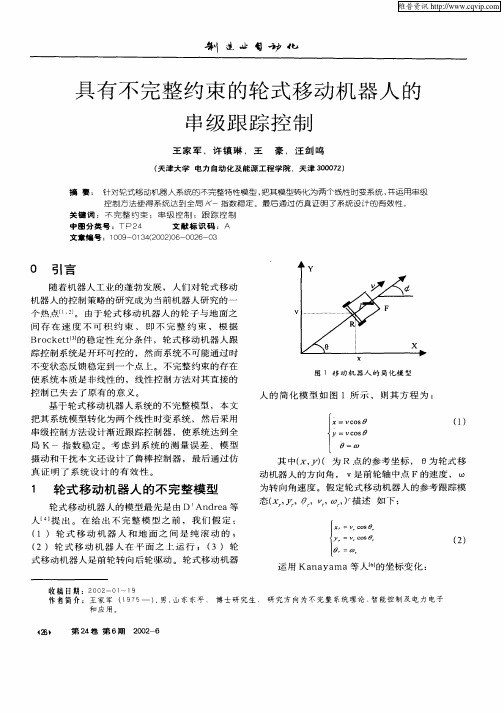
动 机器 人 的 方 向 角 , v是 前 轮 轴 中点 F的 速 度 , ∞ 为 转 向角 速 度 。 假 定 轮 式 移 动 机 器 人 的 参 考 跟 踪模
态 ( , ,0 , , , 描 述 如 下 : , )
1 轮 式 移 动机 器人 的不 完 整模 型
-_ _ ye= 一& e+ vr i 耽 s n 8e
一
一
= cy 一 V + V COS o
( 4口) ( ) 46 ( ) 4 c
由方 程 ( 4)可 知 轮 式 移 动 机 器 人 的 跟 踪 控 制 也 就 是 设 计 控 制 律 v和 ∞使 得 跟 踪 误 差 ( , ,
维普资讯
务 I生
訇
地
具 有 不 完 整 约 束 的轮 式 移 动 机 器 人 的
串级 跟 踪 控 制
王 家 军 ,许 镇 琳 , 王 豪 .汪 剑 鸣
( 津大 学 电力 自动化 及 能源工 程学 院 ,天 津 3 0 7 ) 天 0 0 2 摘 要 : 针 对 轮 式移 动机器 人 系统 的不 完整 特 性模 型 , 其模 型转 化 为两个 线性 时 变 系统 , 把 并运 用串 级
轮 式 移 动 机 器 人 的模 型 最 先 是 由 D An r a等 de 人 l1 出 。 在 给 出 不 完 整 模 型 之 前 ,我 们 假 定 : 4提 ( )轮 式 移 动 机 器 人 和 地 面 之 间 是 纯 滚 动 的 ; 1 ( 2) 轮 式 移 动 机 器 人 在 平 面 之 上 运 行 ; ( 3) 轮 式 移 动 机 器 人 是 前 轮 转 向后 轮 驱 动 。 轮 式 移 动 机 器