气动变频横走式机械手控制通用解决方案
机械手臂结构
现在很多的工厂都在陆陆续续的采用机械臂来替代人工了,这也是工厂现代化生产的必然趋势,毕竟机械手的工作效率高、工作质量稳定,便于管理,支出较少是令所有的工厂老板所没有办法拒绝的。
可是机械臂的结构是怎么样的,相信很多人还是不太了解的,所以下面就来和大家分享一下。
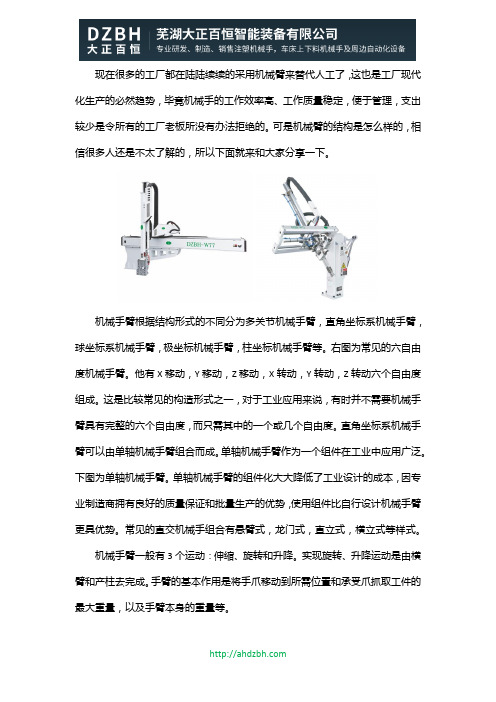
机械手臂根据结构形式的不同分为多关节机械手臂,直角坐标系机械手臂,球坐标系机械手臂,极坐标机械手臂,柱坐标机械手臂等。
右图为常见的六自由度机械手臂。
他有X移动,Y移动,Z移动,X转动,Y转动,Z转动六个自由度组成。
这是比较常见的构造形式之一,对于工业应用来说,有时并不需要机械手臂具有完整的六个自由度,而只需其中的一个或几个自由度。
直角坐标系机械手臂可以由单轴机械手臂组合而成。
单轴机械手臂作为一个组件在工业中应用广泛。
下图为单轴机械手臂。
单轴机械手臂的组件化大大降低了工业设计的成本,因专业制造商拥有良好的质量保证和批量生产的优势,使用组件比自行设计机械手臂更具优势。
常见的直交机械手组合有悬臂式,龙门式,直立式,横立式等样式。
机械手臂一般有3个运动:伸缩、旋转和升降。
实现旋转、升降运动是由横臂和产柱去完成。
手臂的基本作用是将手爪移动到所需位置和承受爪抓取工件的最大重量,以及手臂本身的重量等。
机械手臂由以下几部分组成:(1)运动元件。
如油缸、气缸、齿条、凸轮等是驱动手臂运动的部件。
(2)导向装置。
是保证手臂的正确方向及承受由于工件的重量所产生的弯曲和扭转的力矩。
(3)手臂。
起着连接和承受外力的作用。
手臂上的零部件,如油缸、导向杆、控制件等都安装在手臂上。
此外,根据机械手运动和工作的要求,如管路、冷却装置、行程定位装置和自动检测装置等,一般也都装在手臂上。
所以手臂的结构、工作范围、承载能力和动作精度都直接影响机械手的工作性能。
芜湖大正百恒智能装备有限公司是一家专业研发生产销售机械手的智能科技公司,其生产的各类机械手(双臂回斜式机械手、回斜式机械手、双截单臂回斜式机械手、立式注塑机专用机械手、单臂回斜式机械手、中型一轴伺服横走式机械手、中型两轴伺服横走式机械手、悬挂式全伺服机械手、开放式全伺服机械手、中型三轴牛头式伺服机械手、重型三轴牛头式机械手、重型三轴牛头式伺服机械手),类型丰富,控制精度高,性能优异,价格实惠,是您减省工人、提高效率、降低成本、提高产品品质、提升工厂形象的好选择。
机械手使用说明
助力机械手使用操作说明书北京东昆科技有限公司二零零七年二月二十八日1.概述该机械手用在变速箱装配线上,由气动系统帮助人力,人工操作气动开关控制机械手动作,完成变速箱的搬运、限位。
使用该机械手可以减轻操作人员的的劳动强度,是装配工人的有力助手。
2.技术参数工件重110 kg工作范围大臂长1840mm,水平旋转角度360°弯臂长1240mm,水平旋转角度±150°小臂长780mm,水平旋转角度360°上下运动1800mm控制部分气动气源工作压力≥0.6 Mpa重量930 kg3.结构与工作原理该设备为四连杆机构人工移动型气动助力机械手,机械手在以立柱支撑的回转装置上,由人工可以在360°的范围内回转。
缸体装配机械手的回转装置上装有制动气缸,气缸活塞杆端部的制动机构可使大臂在任意位置制动;大臂为四连杆机构,平衡气缸活塞杆端部铰链与大臂连接,以平衡弯臂、小臂、卡具和工件的重量;升降制动机构可保证四连杆机构升降过程停在任一位置,也可使四连杆机构在意外断气情况下处于原来位置;四连杆末端有机械手的弯臂,弯臂可绕大臂末端的轴线转动±150°;弯臂的下部是小臂,可绕弯臂末端的垂直轴线旋转±180°,小臂末端是卡具。
每个轴均可由制动气缸活塞杆端部的制动装置保持在任意位置。
工作时,操作人员将机械手拉到工作地点,由人工把持机械手臂将卡具以垂直方向送入缸盖位置,将手柄下压后,将定位块对准缸盖孔,人工按下夹紧按扭,将缸盖夹住,此时高压气接通,再按下平衡按钮,向平衡气缸内送进高压,使机械手能轻松的带载运行。
提起缸盖后,由人工扳锁紧手把,压缩弹簧,然后转动手轮,将缸盖旋转到所需角度,按下翻转按扭,将夹具翻转90°,把缸盖放在加工工位,按下卸载,检查无误按下互锁按钮,夹紧气缸松开,此时平衡气缸内的压力变为低压,使机械手脱载运行。
完成一个缸体的抓取、移动、到位等动作。
2009年金华市科学技术研究计划项目
项目名称
承担单位
协作单位
项目 负责人
起止年限
计划 类别
2009-1-002 微Βιβλιοθήκη 纯电动汽车的研发 2009-1-003
2009-1-004 GJ01 标准轨距铁路轨距仪 2009-1-005
2009-1-006 大型竖井贯流式水轮发电机组研发 2009-1-007 高档宽型腔中空轮的研发 2009-1-008 2009-1-009 2009-1-010 2009-1-011 2009-1-012 基于 LIN 总线的电动自行车控制系统 研发 直角伐木锯链及高效生产关键技术 研发 微创治疗骨质疏松性椎体骨折器械 的研发 128 腔环保节材自动瓶坯模研究与试 制 履带自走式联合收割机变速控制系 统设计研制
上海应用技术学院
项目 负责人
魏晓颖
起止年限
2008.05-2010.12 2009.03-2011.5 2008.05-2010.12 2009.05-2011.12 2009.06-2010.12 2009.01-2010.12 2009.05-2010.04 2009.01-2010.06 2009.05-2012.12 2009.04-2011.12 2009.05-2010.12 2009.09-2011.12 2009.01-2010.12 2009.05-2010.04 2009.01-2010.12 2009.09-2011.09 2009.05-2010.12
上海同济科学技术开发有限 周开文 公司 罗选强 浙江大学 浙江大学 刘震涛 应进锋 陈文胜 吕钦渭 张国纲 浙江工业大学 徐锦大
四轮驱动全地形车性能测试技术研 浙江康迪车业有限公司 究及测试设备开发 带智能充电的重心分离式电动车研 2009-1-037 浙江绿源电动车有限公司 发 高速钢焊齿铣刀的刀齿焊接技术开 2009-1-038 金华市玮业工具有限公司 发 2009-1-039 NVDS10000 双速电动绞盘研发 2009-1-040 水稻种子自动精选系统的开发应用 2009-1-041 小型河道水葫芦打捞设备开发 2009-1-042 浙江诺和机电有限公司 金华市农业机械研究所 金华市农业机械研究所
机械手操作说明书

操作说明机械手 操 作 说 明 书操作说明一, 简介:本设备主体部包括以下机构: 1, 上下伺服机械臂:1.5KW 三菱伺服;气动抓胎器;横走气缸; 2, 输送线:400W 三菱变频器及电机两台;检测用对射光电;定中气缸; 3,主要电气部件品牌及明细表:主要电气部件明细:序号 材料名称 1 PLC 2 触摸屏 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 伺服电机 伺服驱动器 输送电机用变频器 三相智能伺服变压器 开关电源 小型断路器 小型断路器 小型断路器 小型断路器 交流接触器 接近开关 电源滤波器 继电器 继电器端子座 超声波传感器 对射光电 材料规格 FX3U-48MT-001 DOP-B05S100 HF-SP152B MR-J3-200A FR-E740-0.4-CHT IST-C-045 NES-150-24 DZ47-60/3P/D16A DZ47-60/2P/D6A DZ47-60/2P/D10A DZ47-60/3P/D25A LC1-D1810M5C RN05-N(17*17) 3 米 PNF221-G-2A RJ2S-CL-D24 RJ2S-05B UB800-18GM40-E4-V1 PZ-G52N 用量 1 1 1 1 2 1 1 1 1 2 2 1 5 1 8 8 1 4 单位 台 个 品牌 三菱 台达 三菱 三菱 三菱 三诺科技 台湾明纬 正泰 正泰 正泰 正泰 施耐德 台湾 RIKO 埃德 idec idec 倍加福 基恩士台 台 台台 台 个 个 个 个 个 个 个 个 个 个 对二, 操作说明: 2.1 操作前注意事项:机械手运行范围内不要有人员站立. 确认抓手用输入气源是否打开且压力达到 0.5MPa 及以上。
2.2 操作说明:2.2.1,简要说明:操作说明1,本系统人机操作画面,支持中英文两种语言方式。
操作者可以在进入系统后的初 始开机画面,选择指定的操作语言。
盘点中国十大实力雄厚的上下料机器人生产企业

盘点中国十大实力雄厚的上下料机器人生产企业上下料机器人在工厂自动化生产线上是非常重要的单元,在中小企业尤其明显,对于资金相对较少的中小企业,实用且相对便宜的上下料机器人能解决很多问题。
下面就盘点一下哪些名声虽不及工业机器人“四大巨头”响亮,但实力雄厚的上下料机器人生产企业。
1东莞市杰康自动化设备有限公司东莞市杰康自动化设备有限公司于创立于2002年08月;是一家国内规模大、品种全、资质技术力量雄厚的自动化设备生产厂商。
从事工业机器人的研发、制造、销售的高新技术企业。
公司引进国外成熟的工业机器人技术与加工工艺,研发并制造出杰康品牌的工业机器人系列产品。
公司产品包括:工业机械手、冲压机械手、滑台、XYTable、单轴系列、直交系列、自动机床系列、自动冲压系列、自动精密滑台系列、水平多关节系列和垂直多关节系列等,并为客户提供自动焊接、自动点胶机、自动测试、自动装配、自动搬运等机器人应用技术和系统解决方案,实现高效率、无人作业生产线。
2常州市兰生工业自动化科技有限公司兰生企业是数控机床和上下料机器人产品的供应商和机加工自动化工程项目承包商,成立于1988年,由“常州兰生数控机床销售有限公司、常州兰生工业自动化科技有限公司、常州市兰生数控职业培训技术学校、常州市兰生机床设备交易市场”等四个经工商部门登记注册的企业实体组成。
分别履行数控机床销售、自动上下料机器人集成、数控技工培训和机床设备维修等四项服务职能。
公司产品:数控机床、镗铣加工中心、数控车床/车削中心、复合数控机床、数控磨床、去毛刺机床、特殊专用机床、数控机床周边配套件、机床上下料机器人、加工中心上下料机器人、数控车床上下料机器人、冲压上下料机器人、铸锻造上下料机器人。
3沈阳机床集团有限责任公司沈阳机床集团于1995年12月对原沈阳三大机床厂:沈阳第一机床厂、沈阳第二机床厂(中捷友谊厂)、辽宁精密仪器厂进行资产重组而组建。
沈阳机床集团有限责任公司(沈阳一机床厂)的中高档机床已成批量进入汽车工业、国防工业、航空航天、轨道交通等核心制造领域;“15”时期获得机床业三个“15”科技攻关项目。
新版广东省东莞注塑机机械手工商企业公司商家名录名单联系方式大全168家

广东 东莞市 东莞市 塘厦镇128工业区
注塑机周边设备,注塑机配件,电热耗材,电器 开关,机械手气动配件,SMT配件系列,润滑油 系列,润滑剂系列,3M胶带,保护膜系列
东莞市森茂自动化 机械有限公司
广东
东莞市樟木头博盈 注塑机配件经营部
广东
东莞市瑞博自动化 科技有限公司
广东
诚意注塑机机械手 配件公司
广东
虎门易辉自动化机 械有限公司
广东
东莞市长安捷霸注 塑机维修店
广东
丰发(香港)科技 有限公司
广东
东莞 东莞 东莞 东莞 东莞 东莞
广东 东莞市 东莞市 大岭山镇向东管理区
触摸工控系统,伺控制服系统,注塑机专用机械 手,专用三轴喷涂设备,自动化焊接设备,自动 化生产线,非标精密机械
中国 广东 东莞市 东 机械手,机械手配件,模具监视器,注塑机周边
中国 广东 东莞市 樟 木头石新工业区19 号
机械手配件,真空吸盘,气缸,油压缓冲器,夹 具,金具,五金机械加工
东坑镇黄麻岭新村 20号
注塑机机械手,输送带,非标设备
广东-东莞市 黄江镇 田美镇
机械手配件,机械手及其配件
东莞市石碣镇彩虹东 路15号【东祠村第 三工业区】
模温机,注塑机,机械手,冰水机,相关辅助设 备
注塑机机械手,斜臂机械手,一轴伺服机械手, 两轴伺服机械手,三轴伺服机械手
广东东莞市石碣镇刘 屋沙洲沙王路15号
注塑机周边设备,机械手
东莞市虎门镇南栅第 快速换模系统,冲床机械手,过载泵,锁模泵,
四工业区文明路11 锁固泵,冲床快速换模系统,注塑机快速换模系
巷4号厂房
统,冲压机快速换模系统,液压夹具
中国 广东 莞虎门
重型三轴牛头式机械手
很多人在看电视或者电影的时候都听说过或者见过机械手,机械臂之类的东西,但是机械手是个什么东西相信大家了解的还是比较粗糙的,认为机械手长的就跟人类的手一样。
其实并不是这样的,只有人形机器人的手是这样的。
而工业机械手完全不是这样的。
工业机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。
主要由执行机构、驱动机构和控制系统三大部分组成。
它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
下面就为大家介绍一下重型三轴牛头式机械手,这是主要适用于2000-4000吨卧式射出成型机的成品取出, 可增加副臂用于三板模的水口取出,上下手臂均采用双截式手臂,横行驱动方式标准为变频马达驱动,可选购AC伺服马达驱动,上下和引拔均为气压驱动。
成品臂上下轴可选购AC伺服马达驱动,增加模内的取出效率。
·一般适用于2000-4000吨注塑机·采用新型嵌入式控制器·进口的气动元件,经久耐用·引拔臂及取物臂采用坚实的钢材,配合精密线性滑轨,刚性好、运行平稳、寿命长·横行和上下及引拔轴均采用AC伺服电机驱动,取出速度快,定位精准,调治具方便快捷,并可在模外设置不同的置放高度芜湖大正百恒智能装备有限公司是一家专业研发生产销售机械手的智能科技公司,其生产的各类机械手(双臂回斜式机械手、回斜式机械手、双截单臂回斜式机械手、立式注塑机专用机械手、单臂回斜式机械手、中型一轴伺服横走式机械手、中型两轴伺服横走式机械手、CNC悬挂式全伺服机械手、CNC开放式全伺服机械手、中型三轴牛头式伺服机械手、重型三轴牛头式机械手、重型三轴牛头式伺服机械手),类型丰富,控制精度高,性能优异,价格实惠,是您减省工人、提高效率、降低成本、提高产品品质、提升工厂形象的好选择。
芜湖大正百恒智能装备有限公司位于安徽省芜湖市,专业研发、制造、销售注塑机械手,车床、磨床、冲压上下料机械手及周边自动化设备。
(整理)搬运机械手PLC控制系统设计
搬运机械手PLC控制系统设计摘要随着工业自动化的普及和发展,控制器的需求量逐年增大,搬运机械手的应用也逐渐普及,主要在汽车,电子,机械加工、食品、医药等领域的生产流水线或货物装卸调运, 可以更好地节约能源和提高运输设备或产品的效率,以降低其他搬运方式的限制和不足,满足现代经济发展的要求。
本机械手的机械结构主要包括由两个电磁阀控制的液压钢来实现机械手的上升下降运动及夹紧工件的动作,两个转速不同的电动机分别通过两线圈控制电动机的正反转,从而实现小车的快进、慢进、快退、慢退的运动运动;其动作转换靠设置在各个不同部位的行程开关(SQ1---SQ9)产生的通断信号传输到PLC控制器,通过PLC内部程序输出不同的信号,从而驱动外部线圈来控制电动机或电磁阀产生不同的动作,可实现机械手的精确定位;其动作过程包括:下降、夹紧、上升、慢进、快进、慢进、延时、下降、放松、上升、慢退、快退、慢退;其操作方式包括:回原位、手动、单步、单周期、连续;来满足生产中的各种操作要求。
关键词:搬运机械手,可编程控制器(PLC),液压,电磁阀ABSTRACTWith the popularity of industrial automation and development, the demand for year-on-year increase of controller, handling the application of robot gradually popularity, mainly in the automotive, electronic, mechanical processing, food, medicine and other areas of the production line or cargo transport, we can be more good to save energy and improve the transport efficiency of equipment or products, to reduce restrictions on other modes of transportation and inadequate to meet the requirements of modern economic development.The manipulator mechanical structure includes two solenoid valves controlled by hydraulic manipulator steel to achieve the increased decline in sports and workpiece clamping action, the two different motor speed through the two motor coils positive control in order to achieve car of the fast-forward, slow forward, fast rewind, slow movement back movement; conversion by setting its action in various different parts of the trip switch (SQ1 --- SQ9) generated on-off signal transmission to the PLC controller, through the PLC internal different output signal, which drivesthe external coil to control the motor or solenoid valves have a different action, the robot can achieve precise positioning; their course of action include: decline in clamping increased, slow forward, fast forward, slow progress, the extension of , the drop in, relax, rise, slow back, rewind, slow back; its operation, including: Back in situ, manual, single-step, single cycle, continuous; to meet the production requirements of the various operations and maintenance.Keywords: handling mechanical hands, Programmable Logic Controller (PLC), hydraulic, solenoid valve目录前言 (1)第一章机械手的概况1.1 搬运机械手的应用简况 (2)1.2 机械手的应用意义 (3)1.3 机械手的发展概况 (3)第三章搬运机械手PLC控制系统设计3.1 搬运机械手结构及其动作………………………………………………3.2 搬运机械手系统硬件设计………………………………………………3.3 搬运机械手控制程序设计………………………………………………1 操作面板及动作说明……………………………………………………2 I/O分配…………………………………………………………………3 梯形图的设计……………………………………………………………1)梯形图的总体设计……………………………………………………2)各部分梯形图的设计…………………………………………………3)绘制搬运机械手PLC控制梯形图……………………………………结论………………………………………………………………………………谢辞………………………………………………………………………………参考文献…………………………………………………………………………………. 附:语句表梯形图I/O接线图前言机械手:mechanical hand,也被称为自动手,auto hand能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。
危险品处理机器人机械手控制系统设计方案
危险品处理机器人机械手控制系统设计方案发布时间:2010-8-21 15:46 发布者:lavida 阅读次数:75一:系统概述危险品处理机器人是用于危险弹药(一般在野外)夹持、拔出、搬运和放置作业,并可携带和放置的装置。
该项目的完成将解决长期困扰我军的事故炮弹、战争遗留弹等危险弹药安全处理问题。
机械手是危险品处理机器人操作过程中直接与弹药接触的重要部件,主要用于执行对危险弹药的夹持、拆除、搬运和放置作业,机械手工作的稳定性直接决定着弹药处理的成功率,因此机械手的设计至关重要。
二:机械手1.结构形式为保证作业的灵活性,机械手设计为由腰身、大臂、小臂、手爪组成,共具有 3 个关节(腰身-大臂、大臂-小臂、小臂-手爪)7 个自由度(腰身1dof,大臂1dof,小臂1dof,手腕4dof)。
其中:腰身——1 自由度,做旋转运动。
固定安装在机器人车底盘上,以车体正前方为基准,可分别向左右旋转约135°(具体可旋转角度应参考车体驾驶控制室位置确定,以避免机械手向后方旋转时碰到驾驶控制室或其它物体),两端各有限位装置以避免自体碰撞。
由液压控制运动,在底部装有电位计反馈准确位置以保证控制精度。
大臂、小臂——各1 自由度,分别相对于前一级关节做上下运动。
以车体水平面为基准,大臂可向上运动45o、向下运动30o,小臂可向上运动25o、向下运动60o。
由液压控制运动,用电位计回馈,保证关节位置准确。
手爪——4 自由度,分别做上下摆动、旋转、伸缩、夹持运动。
以小臂延长线为基准,手爪可上下摆动±90°,又可以小臂为基准轴旋转±180°,伸 1 米,均采用伺服电机提供动力,通过减速箱减速保证功率需求,由伺服电机控制器控制。
有编码盘反馈,保证位置准确。
腰身,大小臂液压回路有压力传感器保护。
油压有稳定装置。
2.控制系统机械手操作可在视觉传感器及控制系统的指示、控制下进行粗定位,操作人员能够凭视图像进行准确定位、夹持等动作控制。
shielding box 屏蔽箱简介
偶 极 子 天 线 采 用 美 与国内亚德客、富士 结构标准要求:采用
国军标要求,瑞士国 康等品牌联合制作; R&S 最新质量标准;
防 计 量 中 心 认 定 测 广 泛 用 于 通 信 电 子 韩国 TESCOM 等知
量
行业
名品牌制作工艺
喇叭天线:采用线性 极化,为宽带测量提 供了一种高效、节省 的方法。
验室
2500mm
1ms 测试系统全自 科研及中科院校
工作尺寸:(L)2800x 动配套使用;24 小 国防科研院校
图-
(W)3000 x(H) 时 监 控 操作 系 统装 物理、电化学实验
2300mm
置
室等;
JC-P8003 对应测试产品规格种类展示
无线 POS 机:手持 pos 机功能演示具有 IC 卡功能,可使用会 员卡和内部发行 IC 卡及有价证券。
制作所需材料: 钣金材料《进出口 商品检验法》 气缸:亚洲 SMC 美国 Park、力士乐 英国诺冠、中国亚 德客、
JC-P8003 关 闭 状 态; 外形尺寸:(L) 340 x (W) 255 x (H) 295 mm 工作尺寸:(L) 280 x (W) 170 x (H) 135 mm
接口控制类型: F6 气动一体式 RS232 总线控制 电动抽拉式控制 手动压缩式控制 360 度旋转扣压式 90 度直通式
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
……………………………………………………………精品资料推荐…………………………………………………
1
气动/变频横走式机械手控制通用解决方案
-CrossWind机械手控制系统
功能特点
CrossWind是针对气动和变频横走式机械手而研发的控制系统,系统完全按照工业级标
准(EMC/EMI)精心设计,拥有丰富的外围接口。控制系统同时支持气动横走式和变频横走
式单臂、双臂机械手,为低端横走式机械手的通用解决方案。
提供10组标准动作程序,用户还可以自定义10组教导程序;
教导功能完善、安全,能适应各种复杂模具的取出需求而不必定制软件;
提供24路标准输入,36路标准输出;
控制变频横走式机械手时,横行轴能手动调位,方便用户维修;
带有手臂电机调位功能;
与注塑机接口符合美规(SPI)及欧规(EUROMAP12)标准;
所有的扩展输入、输出动作均可在教导程序中选用,方便控制周边辅机;
完善的在线帮助功能及时解决用户困难,易学易用;
中英文语言支持;
销售清单
主控制板一块;
注塑机接口板一块;
IO接口板一块
手持操作器一台,STN黑白液晶显示屏;
手控器连接转接线一条;
15P手控器连接电缆一条;
25P IO接口连接电缆一条;
注塑机接口板连接电缆一条;
DC24V开关电源一台;
可选配件
调位电机接口板
使用机械手手臂调位电机接口板后,一共可接6路可逆调位电机用于手臂调位。对应的
调位功能为:
主臂上位调节;
主臂位置调节;
……………………………………………………………精品资料推荐…………………………………………………
2
主臂距离调节;
副臂上位调节;
副臂位置调节;
副臂距离调节;
EMI滤波器
电磁干扰(EMI)电源滤波器是由电感、电容等构成的无源双向多端口网络。能够有效
抑止共模和差模干扰,是电子设备控制传导电磁干扰和辐射电磁干扰的首选工具。
220VAC单相电源滤波
采用单级滤波电路,是一种通用型滤波器
多种输入/输出方式可供选择
结构小巧,易于安装
资料下载
《气动/变频横走式机械手控制系统使用手册》
《气动/变频横走式机械手控制系统硬件装配说明》