张力腿平台系泊系统敏感性分析_宋林峰
深水半潜平台张紧式系泊系统耦合动力响应研究

Mooring
line schemes of different dip angle
张力响应的影响.计算0。、60。、900环境力方向,计算 结果见图5—8. 从上述数据可知,随着缆绳夹角口的增加,系泊 缆最大张力变大,平台最大水平偏移减小.随着缆绳 万方数据
图2系泊缆编号及布置
Fig.2
平台的系泊缆张力和水平偏移最大,其原因是:在 600环境力方向上,平台的受风面积和受流面积均达 到最大值,受到很大的环境载荷;平台的环境力主要 由该方向上的NO.3系泊缆分担,系泊刚度相对较
弱.
Arrangement of the mooring line
and
angle
m,谱峰周期15.5 S,风谱采用API,平均风速
m/s.
590
m/s,表面流苏1.97
根据API
RP
115.0 78.4
1.3系泊系统初步设计 2SM规范u0|,设计每根缆索由3 部分组成:钢链、聚酯绳和钢链.各部分具体参数如 表2所示.缆索数目选择为8根,缆索对称布置,缆 绳夹角卢=22.5。,缆绳水平角度妒=45。,张力倾角 Ot=45。,顶端预张力为3500 kN,具体缆绳布置和角 度定义如图2所示.
b : R 激
4<
埘
暑 \
潍 堡 * 苌 K 略
图9最大张力随缆绳数目变化曲线
Fig.9
Magnum
tension VS.number of line
g \
图6最大水平偏移随缆绳夹角变化曲线
Fig.6
MAX
潞 堡
1}
horizontal dis.VS.intersection angel
基于AQWA的自升式钻井平台水动力响应分析
摘 要:由于海洋环境变化的多样性,自升式钻井平台在风、浪、流联合作用下的动力学响应是十分复杂的。 参照某自升式钻井平台具体参数,结合该平台在位运行时的具体过程,综合考虑风、浪、流等环境荷载作用和 系泊系统的布局形式,利用 ANSYS/AQWA 模块建立了平台的水动力分析模型,对平台的系泊特性进行了水动 力响应分析,得到了系泊缆索不同预张力工况下的平台主体六个自由度的动力学运动响应特性。结合仿真结果 对该平台系泊工况下的水动力特性进行了频域和时域的初步分析研究。计算分析所得结论对具体工程实践有一 定的指导意义。 关键词:自升式钻井平台;水动力响应;系泊系统;运动响应;AQWA
Abstract : Due to the diversity of marine environment changes, the dynamic response of jack-up offshore platform under the combined action of wind, wave and current is very complex. With reference to the specific parameters of a certain jack-up offshore platform, combined with the platform operation process and the environmental loads of wind, wave and current as well as the layout form of mooring system, the finite element analysis model of the platform is established by ANSYS/AQWA, and the hydrodynamic response analysis of the platform is made. The six-degree-of-freedom dynamic motion response characteristics of the main body of the jack-up offshore platform under different pre-tension conditions of the mooring cables are obtained. Combined with the simulation results, the hydrodynamic characteristics of the platform under mooring conditions are preliminarily analyzed and studied in frequency domain and time-history domain. The conclusions drawn from the calculation and analysis have certain guiding significance for the specific engineering practice. Keywords:jack-up offshore platform; hydrodynamic response; mooring system; motion response; AQWA
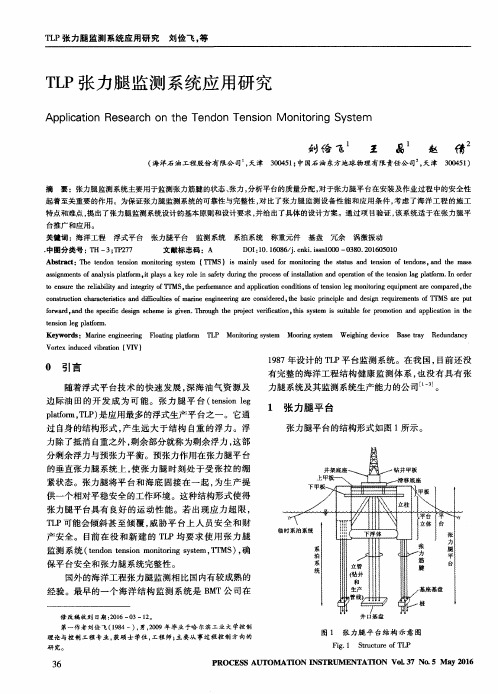
TLP张力腿监测系统应用研究
assignments of an alysis plat form 。it plays a key role in safety during the process o f installation and operation o f t h e tension lag plat for m .In order
台推 广 和应 用 。
关键 词 :海 洋工 程 浮式 平 台 张力 腿平 台 监测 系统 系泊 系统 称重 元件 基 盘 冗 余 涡激振 动
. 中图分 类号 :TH一3;TP277
文献标 志码 :A
ห้องสมุดไป่ตู้
DOI:10.16086/j.cnki.issnl000-0380.201605010
Abstract:The tendon tension monitoring system (TI'MS)is mainly used for monitoring the status and tension of tendons,and the mass
摘 要 :张力 腿监 测 系统主要 用 于监测 张力 筋腱 的状态 、张力 ,分 析平 台的质 量分 配 ,对 于张力 腿 平 台在安 装 及作 业 过程 中 的安 全性
起 着 至关重 要 的作用 。为保 证 张力 腿监 测 系统 的可靠 性与完 整性 ,对 比 了张力 腿 监测 设 备 性 能和 应 用条 件 ,考虑 了海 洋工 程 的施 工 特 点 和难点 ,提 出了张 力腿 监测 系统设 计 的基本 原则和 设计 要求 ,并给 出了具 体 的设 计方 案 。通过 项 目验证 ,该 系统适 于 在 张力 腿平
1 张力腿 平 台 platform,TLP)是应 用最多的浮式 生产平 台之一 。它通
自升式平台桩腿强度对弦管间距敏感性分析

自升式平台桩腿强度对弦管间距敏感性分析朱亚洲;孙承猛;张晓宇;戚欣;秦洪德;姜滨【摘要】以自升式平台桁架式桩腿结构形式优化为目标,进行了桩腿强度对弦管间距敏感性分析,给出了桩腿弦管间距优选值.分析平台所受环境载荷,通过风洞实验获取风暴条件下风载荷数据,通过理论计算得到波浪载荷和海流载荷数据.通过特征值分析得到平台自振周期和一阶偏移值,进而获取计及水动力放大效应的惯性载荷和计及几何非线性效应的惯性矩,分析发现:波流角一定的情况下,计及水动力放大效应的惯性载荷对弦管间距较敏感,随着弦管间距增大基本呈递减趋势;随着弦管间距增大,计及几何非线性效应的惯性矩减小.结合环境载荷计算结果,对不同弦管间距下的桩腿各结构进行了强度校核,对比了各结构强度对弦管间距的敏感性,在此基础上给出了所研究的3种作业水深平台的桩腿弦管间距优选值.【期刊名称】《石油勘探与开发》【年(卷),期】2015(042)005【总页数】6页(P656-661)【关键词】自升式平台;环境载荷;桩腿强度;弦管间距【作者】朱亚洲;孙承猛;张晓宇;戚欣;秦洪德;姜滨【作者单位】哈尔滨工程大学船舶工程学院;中国石油集团渤海装备辽河重工有限公司;中国石油集团渤海装备辽河重工有限公司;中国石油集团渤海装备辽河重工有限公司;哈尔滨工程大学船舶工程学院;哈尔滨工程大学船舶工程学院【正文语种】中文【中图分类】TE53自升式平台因其作业稳定、造价低等优势成为目前浅海油气开发的主流装备。
自升式平台主要通过桩腿结构支撑于海底实现主船体升降作业,因此,桩腿结构是自升式平台设计和建造过程中的核心部件。
国内外学者针对桩腿结构设计和建造技术展开了深入研究,形成了较为成熟的桩腿结构形式[1-5]。
对于作业水深91.5 m (300 ft)以上的自升式平台,桩腿主要为逆“K”斜撑型,以满足海洋环境条件。
随着作业水深的不断增加,作业水深107.0~152.4 m(350~500 ft)的平台系列日益成为主流,作业水深以15.24 m(50 ft)步长递增的传统平台划分模式被打破,需要具有个性化功能和作业水深划分更细化的平台类型。
导管架型海洋平台的疲劳可靠度及疲劳寿命研究

张力腿平台水动力参数计算_胡志敏

文章编号:1005-9865(2002)03-0014-09张力腿平台水动力参数计算胡志敏1,董艳秋2,张建民1(1.清华大学水利系,北京 100084;2.天津大学海洋与船舶系,天津 300072)摘 要:张力腿平台作为一种深水平台,其半顺应半固定的运动特征,成为在复杂的深海海洋环境中进行海洋石油勘探、开采一种重要结构型式。
在张力腿平台波浪载荷的计算中根据产生波动流场的因素不同将波浪载荷分为绕射效应和辐射效应。
本文对辐射效应深入研究并以附加质量、附加阻尼等水动力参数的形式计算了辐射效应对张力腿平台的载荷影响。
在计算水动力参数时将平台简化为浮式直立柱群,采用势流理论,引进改进平面波法计入柱体间水动力相互作用得到辐射波速度势的半解析解,引入大间距假设、通过非平面波修正,精确地求解了柱群的辐射波的载荷作用。
关键词:张力腿平台;辐射速度势;水动力参数中图分类号:P732.2;U674.38 文献标识码:ACalculation of TLP 's hydrodynamic parametersHU Zhi -min 1,DONG Yan -qiu 2,ZHANG Jian -min1(1.Department of Hydraulic Engineerin g ,Ts inghua University ,Beijing 100084,China ;2.Depart ment of Ocean Eng .and Naval Arch .,Tianjin University ,Tianjin 300072,China )A bstract :TLP is the main platform in deep sea for its partly compliant and partly rigid feature .The interaction between wave and TLP includes two parts :one is wave diffraction ,the other is wave radiation .Wave radiation is studied in this paper .In calculating the hydrod ynamic param -eters of TLP ,TLP can be idealized into an array of stationary ,truncated circular cylinders .An approximate method of equivalent plane waves is utilized to investigate the hydrodynamic interactions bet ween the members of TLP 's truncated vertical cylinder array which occur when one member undergoes prescribed forced oscillations .Key words :TLP ;wave radiation velocity potential ;hydrodynamic parameters随着人类石油勘探逐渐向深水领域扩展,涌现出一些新型的适应深海海洋环境的平台,其中张力腿平台是一种典型的深水海洋石油平台,张力腿平台以其半固定半顺应的运动特征在深水海洋石油工程中广为应用。
深海SPAR平台系泊系统耦合动力分析

深海SPAR平台系泊系统耦合动力分析海洋技术第29卷1引言Spar 平台能够很好地满足深度为500~3000m 水域中石油的生产和储存,特别适合深海石油的开采。
已经逐渐变成最具有吸引力和发展潜力的平台形式之一,被很多石油公司列为新一代的海洋石油开采平台。
由于浮体所受的载荷不仅仅来自于海洋环境条件,还受到来自系泊锚链以及立管的力;系泊系统的锚链和立管也不仅受到海洋环境作用力,同样受到由于浮体运动而带来的载荷。
这样,分析浮体或者是系泊系统的动力响应问题时,就不能仅考虑浮体本身或者锚链、立管本身的运动或是受力,还要同时考虑到浮体与锚链、立管的相互作用和影响,即要考虑浮体与系泊系统之间的耦合作用。
美国德州农工大学(A&M )在世界海洋工程领域一直走在前列。
从20世纪80年代开始,Moo H.KIM 等人就开始从事浮式平台的系泊研究,并开发了浮式平台和缆索、立管耦合分析软件WINPOST ,以及同Offshore Dynamics,Inc.公司联合开发了商业化浮体耦合分析软件HARP 。
Ran ,Z.[1]在2000年对SPAR 和TLP 平台的系泊系统进行了耦合分析,研究了不同形式的SPAR 平台的动力响应并对影响平台动力性能的关键参数进行了研究。
Acrandra [2]在2001年对深海人工聚酯缆绳系泊的浮式平台进行了静力和动力响应研究,考虑聚酯缆的非线性应力应变关系以及几何非线性,并通过对聚酯缆系泊的FPSO 、TLP 和浮筒的动力响应分析验证了程序的有效性。
YOUNG-BOK KIM [3]在2003年对多浮体系泊系统耦合进行了研究,重点讨论了多浮体的水动力影响和多体耦合分析方法,并通过实例研究指出记入多体水动力影响对多浮体系泊系统分析的重要性。
Ormberg 等人[4~6]也做了很多关于深海浮式平台系泊系统耦合计算的研究。
国内船舶和海洋工程界学者对深海浮式结构的系泊也进行了许多研究[7-12],但大都忽略了系泊系统的三维效应和系泊系统的动力特性,或是忽略了系泊系统的时变特性以及缆索的大变形效应。
软刚臂单点系泊系统环境参数敏感性分析

软刚臂单点系泊系统环境参数敏感性分析
白雪平;王忠畅;李达;易丛;唐友刚
【期刊名称】《海洋工程装备与技术》
【年(卷),期】2017(004)002
【摘要】以我国渤海“海洋石油113”浮式生产储卸装置(FPSO)的软刚臂单点系泊系统为例,研究软刚臂单点系泊系统受作业海域环境参数影响的敏感性.主要从风速、流速、波高、波浪周期、谱峰因子等环境参数的变化,通过分析确定了FPSO 的运动和单点系泊系统的动力响应对于环境参数的敏感程度.
【总页数】6页(P96-101)
【作者】白雪平;王忠畅;李达;易丛;唐友刚
【作者单位】中海油研究总院,北京100028;中海油研究总院,北京100028;中海油研究总院,北京100028;中海油研究总院,北京100028;天津大学建筑工程学院,天津300072
【正文语种】中文
【中图分类】P751
【相关文献】
1.软刚臂单点系泊系统环境参数敏感性分析 [J], 白雪平;王忠畅;李达;易丛;唐友刚;;;;;
2.水上软刚臂单点系泊系统维修改造浅析 [J], 唐坤
3.水深对水上软刚臂单点系泊系统影响研究 [J], 雷慧;余骁;王允;麻妍妍
4.软刚臂单点系泊系统横向刚度分析 [J], 尧白莲;董海防;朱刚;袁威;李慧
5.水下软刚臂式单点系泊系统上部组块安装技术研究 [J], 胡双
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
110
中国Leabharlann 造船学术论文
作用。本文针对一座传统型张力腿平台的系泊系统进行耦合分析,对极端工况下平台不同的筋腱轴向 刚度,相邻筋腱的布置角度,筋腱顶部预张力和筋腱数目进行了计算和对比。
1 理
论
TLP 平台运动响应分析涉及平台的稳性、 张力腿的张力和疲劳、 立管的强度以及甲板与水面间隙等。 在平台的运动响应中,由波浪引起的升沉运动、纵摇运动、横摇运动以及垂荡运动都非常小,还可忽 略风流产生的平台各方向摇动。所以平台的运动响应主要考虑水平方向的运动,即横荡、纵荡。平台 水平位移包括整体位移、波频运动和低频运动[8]。 在频域分析使用三维辐射/绕射理论计算平台所受的波浪力,并使用 Morison 公式考虑粘性影响, 对平台进行水动力分析。通过计算,得到平台的附加质量、阻尼系数以及二阶传递函数矩阵(QTF) 等,并将这一系列数值加入时域计算程序中。在时域计算程序中,需要考虑筋腱与平台的耦合作用, 以及平台受到的风流影响。平台时域耦合方程中时间积分项使用四阶龙格库塔法求解,耦合方程为
53 卷 第 4 期 (总第 203 期)
宋林峰,等:张力腿平台系泊系统敏感性分析
111
表1 参数 作业水深/m 平台吃水/m 总排水量/t 总质量/t 立柱长/m 立柱直径/m 立柱跨度/m 数值 1000 22 25287.8 16120 52 16 50
张力腿平台主尺度表 参数 浮箱宽/m 浮箱高度/m 重心高 KG/m 浮心高 KB/m 转动惯量 Ixx/(Kg·m²) 转动惯量 Iyy/(Kg·m²) 转动惯量 Izz/(Kg·m²) 数值 8 8 31.1 9.53 7.05×109 7.05×109 7.63×109
ˆ (t ) Kx ˆ (t ) F (t ) (t ) Bx Μx
(1)
ˆ ,K ˆ 分别是整个耦合系统质量、阻尼和刚度矩阵,F 是外力,符号 表示该矩阵没有锚 式中,M, B
链和连接弹簧的影响。因此,这些影响在对时间积分时考虑为外力影响。下面公式中的足标 V 和 L 分 别代表浮体和锚链:
均方差 4.27 1.19 0.35 0.04 0.06 0.40
张力腿平台筋腱最大响应值 高频均方差/kN 1100 1100 940 930 1500 1500 1200 1200 低频均方差/kN 560 570 480 470 400 410 350 350 最大值/kN 2.40×104 2.40×104 2.30×104 2.30×104 2.40×104 2.40×104 2.30×104 2.20×104
关
键
词:张力腿平台;耦合;系泊系统;敏感性分析 文献标识码:A
中图分类号:U674.381
0 引
言
随着海洋开发向深海推进,油气资源的开发也不断向深海进军。从第一座张力腿平台(TLP)设计方 案提出以来,它一直是人们关注与研究的焦点。张力腿平台系泊系统的性能是其中的一项重要研究内 容。 曾晓辉[1](2009)分别对一座传统式张力腿平台使用非线性梁和无质量弹簧进行平台的动力响应预 测,分析了两种模型产生差别的原因。欧进萍和闫宫伟[2](2010)对四种不同的张力腿平台(传统式张力 腿平台,扩展式张力腿平台,MOSES,SeaStar)使用 AQWA 软件进行了模拟。结果表明四种平台在同样的 波浪下运动性能是不同的。 Yang 等人[3](2008)对扩展式张力腿平台在极端环境下进行了数值计算: 使用 WAMIT 软件计算了频域下平台的附加质量,阻尼,一阶及二阶力;时域计算使用自编程序基于面元法 以及 Morison 方程将粘性影响考虑在内。 Lee 和 Lim[4](2008)对一种改进型的 TLP 进行了浮体-系泊耦合 计算。这座 TLP 平台的工作水深为 1 829m,计算软件使用 WAMIT+WINPOST。模拟了受力最大的筋 腱的张力产生的疲劳,并且根据计算结果优化平台主体结构。论文的作者认为耦合计算比线性近似方 法要好得多,并且更接近于实际。Masciola 和 Nahon[5](2008)计算了 TLP 平台六自由度的运动和规则波 的影响。 并且考虑了浮力所产生的复原力矩; 选用莫里森方程计算了所受的粘性影响。 Srinivasan[6](2010) 提出利用桁架式的浮筒来减少波浪载荷对平台的作用,使 TLP 可以在更深水域作业。他设计了一种假 底座形式的 TLP 使 TLP 更适应深水作业,该 TLP 被称为 Tension-BasedTension Leg Platform(TBTLP)。 Z.H.Ran[7](2000)提出了一种采用统一坐标的三维弹性梁理论来模拟系泊结构物的耦合运动,指出:二 阶的和频力和差频力主要存在于线性波浪力以外的共振频率。二阶力对于预测张力腿平台的慢漂运动 和 Springing 现象非常重要。 在平台整个工作寿命期限内,张力腿的系泊将一直伴随着平台,对平台的安全性起着至关重要的
M M= V 0 ˆ = BV B 0
ˆ = KV K 0
0 ML 0 0
0 0
(2) (3) (4) (5)
F (t ) F (t ) V FL (t )
通过计算,可以得到平台的运动响应和张力腿的运动。其中风力和流力根据 DNV CN30.5 规范进 行计算。
(哈尔滨工程大学船舶工程学院,哈尔滨 150001)
摘
要
张力腿平台是一种典型的深水采油平台,其优良的运动性能得到了业内的认可。针对一座传统式张力腿 平台进行了数值模拟和分析,得到平台的动态响应。对极端工况下平台筋腱不同的刚度、布置角度、预张力 和筋腱数目进行了计算和对比,得到了系泊筋腱受力以及平台位移的时历曲线。通过数据的分析得到了一些 在实际工程应用中有用的结论。
F l k EA L L
(6)
平台各筋腱动力响应逐渐增大的趋势,意味着安全因子会进一步降低。当轴向刚度增加了 1 倍后, 动力响应最大的 2 号筋腱所受到的最大张力达到了 25.7MN,增加了 1.83MN,受力最大的 2 号筋腱的 最大张力如图 5 所示。 从图 6~图 8 中可以看出,随着刚度的增加,纵荡和横荡最大值总体呈下降趋势,纵荡方向下降了 2.0m。横荡值下降了 0.5m,从另外一个方面说明了张力腿平台在平面内具有顺应性,增加轴向刚度对 平面内的运动影响并不明显。对于竖直平面来说,改变刚度时平台垂荡响应有上升的趋势,艏摇的最 大值呈明显的下降趋势。对于横摇以及纵摇来看,随着轴向刚度的增加,横摇纵摇呈下降趋势。且在 刚度从 0.8 倍变为 2 倍时,纵摇值由 0.43°变为 0.19°,改变幅度为 56%,横摇值由 0.20 降为 0.16,改
表2 参数 总预张力/kN 筋腱根数 n 筋腱就位长度 L/m 筋腱外径 D/m 筋腱壁厚 t/m 干重/(Kg/m)
张力腿系泊系统参数 数值 68900 8 977.8 0.701 0.038 993.24 参数 湿重/(Kg/m) 抗拉刚度 EA/kN 抗弯刚度 EI/ (kN·m²) 惯性力系数 Ci 拖曳力系数 Cd 极限张力/ N 数值 400 2.3×107 1.24×106 2 1.1 4.70×107
53 卷 第 4 期 (总第 203 期) 2012 年 12 月
中
国
造
船
Vol.53 No.4(Serial No. 203) Dec. 2012
SHIPBUILDING OF CHINA
文章编号:1000-4882(2012)04-0109-09
张力腿平台系泊系统敏感性分析
宋林峰,孙丽萍,赵君龙,钱佳煜
53 卷 第 4 期 (总第 203 期)
宋林峰,等:张力腿平台系泊系统敏感性分析
113
的刚性特征。同时发现,平面内低频的均方差比高频的均方差要大得多,说明低频载荷虽然比较小但 是由于低频载荷的周期与平台平面内的固有周期相近,而且平面内无系泊约束,导致平台平面内运动 受到的约束较少,因此平台的水平运动较大。平面内的顺应性导致了纵横荡以及艏摇运动的固有频率 较低。对于垂荡及纵横摇来说,其高频和低频的均方差都较低,具有明显的波频特性。这是由于它们 的固有频率在波浪能量的集中区域,因此波频能量对平台运动贡献较大。同时发现张力腿筋腱的最大 响应发生在 2 号筋腱处,这与环境载荷的方向有关。高频响应均方差大于低频响应的均方差,说明张 力腿平台对高频响应比较敏感。 3.2 不同轴向刚度下张力腿平台运动响应分析 为了研究张力腿平台筋腱的轴向刚度对系泊系统的影响,将筋腱轴向刚度设置为 2.2 节表 2 中 EA 值的 0.8/1/1.2/1.4/1.5/1.6/1.8/2 倍。从图 5 中可以看出,随着轴向刚度的增加,张力腿平台筋腱的最大 动力响应明显呈上升趋势。这可以从胡克定律得到解释:
均方差/kN 1200 1300 1100 1000 1600 1600 1300 1200
1.90×104 1.80×104 1.80×104 1.60×104 1.60×104 1.60×104 1.60×104
通过计算结果可以看出张力腿水平面内的运动(横荡、纵荡及艏摇)最大运动幅值比平面外的运 动(横摇、纵摇及垂荡)大,说明张力腿平台在水平面内具有明显的顺应性,而在竖直面内具有明显
2 数值模型
2.1 张力腿平台基本尺度 本文研究的张力腿平台采用传统的张力腿平台结构形式, 由平台本体 (平台上体、 立柱和下体浮箱) 、 张力腿系泊系统以及海底基础三大部分组成,其主体结构由 4 根尺寸相同的圆柱形立柱与 4 个矩形浮 箱连接构成,呈对称分布,主尺度见表 1。 2.2 系泊系统布置 由于张力腿平台所产生的浮力远大于平台自身的重力,所以抵消掉重力所剩余的净浮力将由平台 筋腱的预张力予以抵消。本文所分析的张力腿平台的系泊系统由 4 组共 8 根张力筋腱(tendon)组成。 每根筋键由最小直径为 0.7m 使用 X65 钢管采用螺纹和销连接构成。下端与海底基础的筋腱接口连接, 为张力腿平台提供系泊。具体参数如表 2 所示。