交流伺服在喷气织机经纱张力控制系统中的应用
喷气织机张力怎么调【交流伺服在喷气织机经纱张力控制系统中的应用】
喷气织机张力怎么调【交流伺服在喷气织机经纱张力控制系统中的应用】喷气织机张力怎么调【交流伺服在喷气织机经纱张力控制系统中的应用】为提高织物质量并满足喷气织机高速、高性能要求,本文结合交流伺服系统高控制精度的特点,在ARM微控制器*****的丰富硬件资源的基础上,研制了基于交流伺服系统的喷气织机经纱张力控制系统。
论文完成了伺服系统在经纱张力控制中的理论分析和整体设计,该系统能够满足喷气织机的高速和高精度要求,并能使经纱张力保持恒定。
To improve the fabric quality and meet the high-speed, high-performance requirements of air-jet looms, an AC servo-based air-jet loom warp tension control system was designed grounding on the AC servo system’s high control accuracy and ARM microcontroller *****. Theoretical analysis and integrated design of servo system in terms of the warp tension design were completed. The system can satisfy the high-speed and high-performance requirements of air-jet looms, and can maintain the tension stability of warps.喷气织机完成经、纬纱线的交织需由提综、引纬、打纬、送经、卷取五大运动的有机配合以及其他辅助运动的配合,整个运行过程控制复杂。
从经轴到卷布辊的整个织造过程中,受织机各大运动的影响,经纱张力呈周期性变化。
交流伺服张力控制系统

交流伺服张力控制系统PLC技术交流伺服张力控制系统李纯绪(沈阳森泰电子技术有限公司,沈阳110044)[摘要]介绍伺服张力控制系统的选件,工作过程及应用情况. 关键词伺服张力控制系统数控缠绕机1系统简介交流伺服张力控制系统是为数控气瓶缠绕机配套的线轴控制系统.数控缠绕机为4轴联动系统,能在各种气瓶上缠绕碳纤维(或玻璃纤维),其加工程序依缠绕花式工艺要求编制,由缠绕机数控系统完成.因缠绕工艺要求每层纤维有不同的张力,所以数控编程中有张力给定数据,数控系统在执行缠绕程序时,会随时将张力给定数据以8位BCD码形式传给张力控制系统,经译码形成张力控制的给定信号.数控缠绕机可同时加工3只同规格,同缠绕花式的气瓶,每只气瓶最多缠绕4根纤维,为此张力装置设计成12线轴的,每个线轴由一个独立的伺服闭环控制,12个伺服闭环共用一个张力给定信号.张力控制系统以PLC为控制核心:(1)完成张力信号BCD码译码,D/A转换,输出0~1OV模拟电压给压力调节阀.(2)张力反馈信号取自张力杆上光电编码器的A,B脉冲,A,B脉冲的相位和脉冲数经PLC运算输出脉冲十方向信号给伺服驱动器,调节系统张力.(3)输入点控制系统启动,完成自动取零点和延时伺服驱动器使能输出.(4)有手动零点设置.此张力系统运行时,线轴要做正,反旋转,既有放线也有收线,要求快速,稳定,故选用交流伺服电机来驱动;检测元件是非接触式光电编码器,比电位器更可靠.系统由PLC位置控制,交流伺服驱动器,交流伺服电机,光电编码器,低摩擦气缸,压力调节器组成.2控制系统选件张力控制系统采用3台OMRONCP1HPI,每台负责4路位置控制,其中1台选用模拟输出单元以输出张力给定的模拟电压.每台PLC有8个高速计数输入点,接4 台编码器的A,B脉冲信号.伺服系统选用安川ZII系列的SGDM-10ADA伺服驱动器和SGMGH-09ACA61伺服电机.因为PLC的高速计数输入点只有8个,编码器如使用双端输出,2台编码器就占了8个高速输入点,故编码器选用集电极开路输出型,工作电压为DC24V的ZSF收稿日期:2011—03—076.215-008CW一1024BZ3—12-24C.3控制系统工作过程PIc输入点接到启动信号,立刻输出10V模拟电压给压力调节器,10V电压对应压力调节器最高压力输出, 从而给12个气缸加上最高压力.此时伺服电机没上使能,线轴可自由转动,气缸将张力杆推到极限位置(一15.),以这个位置为零点并将所有计数器清零;同时启动延时开始,5s后输出伺服使能,伺服电机按张力控制系统指令运行.这段过程就是取零点.低摩擦气缸,张力杆和编码器组成了张力控制系统反馈与给定的比较环节.张力杆的角度变化就是比较结果, 其轴与编码器直连,摆动的角度经编码器转换成A,B脉冲信号后送到PLC的高速计数单元.张力杆的极限位置是±15.,现场实际测得编码器在极限范围内转动的脉冲数是196个,给定与反馈比较的零点(O.)在96个脉冲处. 张力杆从一15.向+15.转动时,A脉冲超前B脉冲9O., 计数器加计数;张力杆由十15.向一15.方向转动时,B脉冲超前A脉冲90.,计数器减计数.在PIC内设置96,与计数器的数比较,计数器的数小于96,线张力大于给定, PLC方向脉冲输出1,伺服电机正转放线;计数器的数大于96,线张力小于给定,PLC方向脉冲输出0,伺服电机反转收线.96与计数器的差值决定速度脉冲数,控制伺服电机的转速(设置伺服为脉冲+方向的控制方式),差值越大,电机转速越高.这样,位置控制的闭环系统就能保证张力杆在96个脉冲(0.)处左右运行.实际运行中,张力杆的摆幅不超过±5..数控系统张力信号的8位BCD码,经PLC的译码程序和D/A转换,输出O~10V模拟电压,电压值对应所要求的张力,此电压控制压缩空气的压力调节阀,使供给12 个低摩擦气缸的压缩空气的压力随张力要求而变,从而实现纤维张力跟随数控缠绕机程序自动给定.当需要暂停时,只下使能信号,零点和张力信号不变.PIC不下电.计数单元就不清零(为处理暂时性工作,加有手动清零开关).缠绕机很少有12根线同时使用的情况,为此伺服驱动器的电源是分别控制的,通过面板开关可选择开,停任意一台伺服驱动器.要使CP1H具有4路位置控制能力,只有用集电极开电工技术}2011I7期I33PI技术路型的编码器高速点才行;但是该编码器为单端输出形式,故抗干扰性不如差动输出型.为使系统运行稳定,可靠,设汁前在现场做r试验,编码器使用长度为15m电缆,而实际使用的电缆长度在10~14m.为获得高速和高精度,通过位置控制闭环内的PIC可设置PID参数,本系统在调试时没用PID调节就已达到运行要求,所以省去了这个环节.本张力系统是多环自动控制系统,图l和图2是系统框图和机械结构图.给定是低摩擦汽缸的拉力,反馈是线的张力,张力臂完成二力的比较,编码器输出比较的结果,即位置信号.这个位置信号由A,B脉冲组成,作为计数脉冲送到计数单元.张力杆向张力小的方向转动,计数器加计数,反之计数器减计数,这是第一个比较环节;在第二个环节,计数器里的数与程序编制的张力杆中心的脉冲数比较,其结果做PID调节后由PIc输出控制信号到伺服驱动器;伺服驱动器还有第三个环节一一位置控制环(位置环内还有电流环),PIC的双脉冲输出是给定,反馈是伺服电机的编码器,这个环节要保证伺服电机准确地跟踪PIC送出的速度脉冲(Cw)和方向脉冲(CCW),实现伺服电机的位置控制,即控制张力杆在中心位置,从而保证张力恒定.图1系统框图线轴张力杆图2系统机械结构图系统PIc部分电路和伺服电机部分电路如图3和图4所示.4应用情况目前,本系统应用在缠绕机上的线速度约为lm/s.为检查系统的快速性,试车时曾快速拉近至10m/s,跟踪得较好,张力杆的波动幅度不大于±5..另外,此案的最大优势在于系统工作稳定,可靠,3年没出现过任何占殳障.】一埘编码器手,lIⅢ.jBs-1DC24V董至重墨譬量萎量至罢i墨兰三至;f)MIt,r)N(pJHPJ善§§l;,,D/AIi图3PLO部分电路图图4伺服驱动部分电路目前,正在应用的单片机+伺服电机(或步进电机)+电位器缠绕机张力控制系统,故障率高,主要是抗干扰性能差和电位器易损坏;工控机+伺服电机+力传感器控制系统的稳定性差,性能不好,调试困难.为此设计了伺服张力控制系统,在目前张力控制装置中还未见采用.这套控制系统采用的都是通用元器件,I】JC程序简单,易于维修,改造和制作,从系统结构看是比较好的张力控制系统.(上接第12页)和常规锁具的使用实现了过程层操作防误的强制闭锁功能.此方案已应用在部分智能变电站,效果良好,是目前完善的智能化变电站防误闭锁系统解决方案.参考文献[1]国家电网公司.国家电网公司防止电气误操作安全管理规定Ez].北京:中国电力出版社,2006[2]DI/T687一d999微机型防止电气误操作装置通用技术条件Es]l电工技术[3]DI/T860变电站通信网络和系统[S][4]Q/GDW3832009智能变电站技术导则[s][5]Q/GDW393--2009110(66)~220kV智能变电站设计规范ES]EO]Q/GDW394—2009330~750kV智能变电站设计规范Is]E7]Q/GDW4262010智能变电站合并单元技术规范[S]E8]Q/GDW428-2010能变电站智能终端技术规范Es]E9]GDw441—2010智能变电站继电保护技术规范[s_(编辑丘石)。
变频器和交流伺服的中心卷绕功能在纺织机械中的应用

本身固有 的优点 , 结构简单 , 坚固耐用 , 经济可靠 , 经
过多 年 的实践证 明 , 频 调速 技 术 可 以满 足 中心 卷 变 绕 的要求 , 国内外 的整 经 机 、 纱 机 、 浆 卷染 机 等 同类
和轧卷染色机将布卷绕在收放辊上。这些设备在卷 绕过 程 中都 有一个 共性 问题 , 即恒 张力 控制 , 绕 直 卷 径从小直径到最大直径 , 要求纱和布的张力保持不 变 。本 文主 要讨论 采用 变频器 或交 流伺 服 的中心卷
例 如 : 整 经机将 成片纱 卷绕 在经轴 上 ; 分批 浆纱 机和 浆染联 合机将 成 片 浆 过 的纱 卷绕 在 织 轴 上 ; 染 机 卷
障率高, 企业不大欢迎。进 口的高档卷染机和轧卷 染 色机 , 也有 采用 液压控 制方 式 , 其价格 高 。 但 自从 变频 器 技术 问世 以来 , 们 考虑 将 变频 调 人
2 2 2 中心卷绕 的 张力控 制方 案 . .
பைடு நூலகம்
伺服 电动 机 , 现卷 绕 张力精 确控 制 。 实
纺机 中心卷 绕 张力控 制
能的 变频 器和 交流伺服 的 多种解 决 方案 , 举应 用 实例 。 并
关键词
1 前言
纺织 生产 过程 中 的半成 品或成 品 , 如纱 线 、 布匹
经 常维护 , 特别在 印染 企业 环境恶 劣 , 直流 电动机故
( 棉布、 化纤混纺布 、 丝绸等) 需要卷绕在轴或辊上 ,
维普资讯
纺 织 机械
20 0 7年 第 5期
・ 织 电 气 ・ 3 纺 3
P C不需 要 使 用 模 拟 量 模 块 , 低 了成 本 , L 降 因此 这 种 方式 成为 发展方 向。 国外 多家 公 司推 出卷 绕 专用 变频器 产 品供 选用 , 如西 门子 公 司 、 B A B公 司 、 默 艾 生公 司 、 三恳公 司 以 及 中 国汇 川 公 司 等 产 品并 已批 量 应用 于 国产纺机 中心 卷绕 的设 备上 。西 门子 公 司 具有 中心 卷绕 功 能 的交 流 伺 服 系统 , 已在 国 内高 也 档七单元 浆纱 机 上配套 应用 。
伺服电机在纺织设备中的应用

伺服电机在纺织设备中的应用伺服电机是一种可以根据控制系统的指令精确控制转速、位置和加速度的电机。
在纺织设备中,伺服电机扮演着至关重要的角色,不仅能够提高生产效率,还可以改善产品质量。
本文将详细介绍伺服电机在纺织设备中的应用。
1. 伺服电机在织布机中的应用在织布机中,伺服电机通常用于控制织机的速度和张力。
通过伺服电机的精确控制,可以实现织布机各个部位的同步运转,从而生产出质量更高的面料。
此外,伺服电机还可以根据不同面料的特性进行调节,提高生产效率和减少损耗。
2. 伺服电机在缝纫机中的应用在缝纫机中,伺服电机的应用也非常广泛。
通过伺服电机的精准控制,可以实现缝纫机的高速运转,并且可以调整缝纫机的针步距、张力等参数,以适应不同布料的缝合需求。
因此,利用伺服电机可以有效提高缝纫机的生产效率和缝合质量。
3. 伺服电机在整经机中的应用整经机是纺织设备中用于整经的重要设备,而伺服电机在整经机中的应用也非常重要。
伺服电机可以精确控制整经机的张力和速度,保证经纱的稳定输送,避免因为张力不均匀而导致的经纱断裂等问题。
这样不仅提高了整经机的整经效率,也提高了整经的质量。
4. 伺服电机在印染设备中的应用在印染设备中,伺服电机通常用于控制印染机的进给、送料和卷取等动作。
通过伺服电机的精确控制,可以实现各个部位的同步运转,确保印染效果的一致性。
而且伺服电机还可以根据不同印染材料和工艺要求进行调节,提高印染设备的生产效率和产品质量。
总之,伺服电机在纺织设备中的应用非常广泛,不仅可以提高生产效率,还可以改善产品质量,降低生产成本。
随着科技的不断发展,伺服电机在纺织设备中的应用将会变得更加广泛和重要,为纺织行业的发展注入新的动力。
希望未来能够看到更多创新的纺织设备,为纺织行业带来更多的惊喜和发展机遇。
伺服系统在纺织机械中的应用

伺服系统在纺织机械中的应用张嘉胜;曹继鹏【摘要】伺服系统具有控制精度高、运行平稳、可靠、响应快、过载能力强等特点,被广泛应用于机械运动控制领域,使机械控制技术水平有了大幅度提高.本文就伺服系统在纺纱、织造、非织造机械等方面的应用情况进行了综述,从伺服系统在纺织机械上的具体应用情况和解决的具体问题等方面阐述了其在实现纺织机械高产、高质量生产方面的贡献.【期刊名称】《辽东学院学报(自然科学版)》【年(卷),期】2015(022)003【总页数】5页(P190-194)【关键词】纺织机械;伺服系统;纺纱;织造;针织【作者】张嘉胜;曹继鹏【作者单位】辽东学院服装与纺织学院,辽宁丹东118003;辽东学院服装与纺织学院,辽宁丹东118003【正文语种】中文【中图分类】TS103【机械与电子工程】伺服系统(Servo mechanism)又称随动系统,是用来精确地跟随或复现某个过程的反馈控制系统。
“伺服”一词源于希腊语,本意是“奴隶”,意指人们要把“伺服机构”当做奴隶一样能够很好地控制的工具[1]。
伺服系统经历了从液压到气动再到电气化的发展历程,如今已经趋于成熟。
它能使输出的被控量(如物体的位置、状态、方位等)能够准确地跟随给定值(或输入目标)的任意变化。
现代交流伺服系统具有精度高、运行平稳、可靠、响应快,过载能力强等特点,它逐渐从机电控制的大家族中脱颖而出,由最早应用的军事和宇航领域逐渐进入到工业和民用领域,目前国内纺织工业中纺织机械伺服应用约占国内伺服应用总量的8%左右,下面就伺服系统在纺织机械中的应用进行论述。
文献[2]介绍了分离罗拉数控伺服电机驱动技术在JSFA388、JSFA588型精梳机上的应用,经过纺纱试验表明:该技术的应用使JSFA388型精梳机的精梳条条干CV值达到2.15 %,短绒含量为2.9%,棉结清除率为69%,提高了纺纱质量水平,同时利于节能降耗和提高机器的运转稳定性;JSFA588型精梳机采用了完全具有自主知识产权的数控伺服电机驱动系统,简化了分离罗拉传动机构,提高了分离罗拉的运动精度,大大减轻了机器的振动和噪声,还可以根据纤维长度调整分离罗拉顺转定时及有效输出长度,进一步提高精梳机对纤维长度的适纺性。
交流伺服在喷气织机经纱张力控制系统中的应用
如 果织 物 的纬 密 等参 数 改 变, 通 过触 摸 屏或 由织机 可 主控 制 器通过 C 总线 进行 张 力等参 数 设 置。 制 器会将 AN 控
这些 参 数保 存 到片 外存 储 器的 指 定位 置 , 以便 下 次 开机 时
可 自 进 行读 取 。 动 控制 器根 据 织物 的 纬 密 等参 数 计算 出送
文l 王 藩 马东明
为 织质并R 气机速9丰曲卅资 基上研 统控 精 的点在足控 器C高 能硬 的础 伺制高制 提 物量满喷织高气 的富件 源 合流服了于 度 高特 ,A微 制L2 性要们 本结 交,系基交 M P、 . ,文 2 ㈨m 4 求-蚰 统喷 制满 筠 ~ mm =㈤
的 张 _ . 喷气 织机 存 市场 上的 竞争力, 经 纱张 力的 控制 精度 成 为 对
衡量 设 备性 能的 - - 项重要 指 标 。 何实现 喷气 织机 经纱张 如 力的精 确 控 制 , 首先 是对 喷 气 织机 的高速 性 对系统 提 出高
实时性 要求 ; 另外 , 对送 经电机 和卷取 电机 的同步性 及控 制
合, 个运 行 过程 控 制 复杂 。 经 轴 到卷 布辊 的 整个 织 造 整 从
在 Ⅻ 一 糙 l 要 咖 _ 删
造生 产 的连 续进 行。 取机 构 的作用 是把 已织 成 的织物 引 卷
离织 口, 并通 过导布 辊卷 绕到卷 布辊 上 , 以保 Ⅱ织造生 产总
是在 固定 的位置上 连续进 行。 同时, 据织机 转速 和织物纬 根
力 一一一 能 一m 二 ~
。
,
— 、 士 ,
S a
啊 .
. n
,
剃 薹 硐 毒 Ⅵ 伺 )一 删 黼 毹 m 掷 一 和 1 一
伺服系统在放卷机张力控制中的应用的开题报告
伺服系统在放卷机张力控制中的应用的开题报告一、研究背景放卷机是工厂中的一种非常重要的设备,用于放开卷材料并使其保持适当的张力。
放卷机张力控制对卷绕过程的质量和效率有非常大的影响。
传统的放卷机张力控制方法主要采用机械调整和手动操作等方式,这种方法存在很多不足之处,如程度受操作者技术水平、调整范围有限等。
随着科技的不断发展,伺服系统技术应运而生。
伺服系统技术是电机控制和信号处理等技术的综合应用,能够实现高精度、高速度、高可靠性和精准的控制。
因此,将伺服系统技术应用到放卷机张力控制中,能够提高放卷机控制的精度和效率,并且降低操作难度。
二、研究目的本文的研究目的是探究伺服系统在放卷机张力控制中的应用,通过分析伺服系统在放卷机张力控制中的效果,评估该技术的应用价值,并提出相应的优化建议,推广和应用该技术。
三、研究内容本文的研究内容包括以下几个方面:1. 伺服系统主要组成部分的介绍:伺服系统是由电机、电调器、编码器和控制器等组成的。
本部分将对伺服系统的主要组成部分进行简要介绍,并阐述各部分的作用。
2. 放卷机张力控制的现状分析:本部分将对目前放卷机张力控制的现状进行分析,包括现有控制方式的不足之处、缺点和存在的问题等。
3. 伺服系统在放卷机张力控制中的应用:本部分将介绍伺服系统在放卷机张力控制中的具体应用方法,包含伺服系统控制放卷机开始放料、自动调整电机速度、控制张力等方面的详细介绍。
4. 伺服系统在放卷机张力控制中应用后的效果分析:本部分将对伺服系统在放卷机张力控制中应用后对张力控制和卷材效果的影响进行分析和评估。
5. 结论和优化建议:本部分将总结伺服系统在放卷机张力控制中的应用,并提出相应的优化建议,为该技术的推广和应用提供参考。
四、研究方法1. 文献调研:通过查阅大量相关文献,了解伺服系统在放卷机张力控制领域的应用现状和发展趋势,以及掌握该技术的相关理论和实践经验。
2. 现场实验:通过在实际的放卷机生产线上进行实际的伺服系统应用效果测试,评估该技术的实际应用性能和效果。
伺服控制器在纺织机械中的应用指南
伺服控制器在纺织机械中的应用指南随着科技的进步和纺织行业的发展,纺织机械的自动化程度越来越高。
而伺服控制器作为现代机械控制系统的核心部件之一,广泛应用于纺织机械中,实现精准的运动控制和产品质量的提升。
下面将详细介绍伺服控制器在纺织机械中的应用指南。
首先,伺服控制器在纺织机械中的主要应用之一是纺纱工艺中的牵伸控制。
在纺纱过程中,纤维需要经过牵伸来改变纤维的物理性能,如拉伸后的纤维强度、断裂伸长等。
传统的牵伸方式主要依靠机械传动和压力控制,但是这种方式无法满足对产品质量的高要求。
而采用伺服控制器,可以通过精确调整伺服电机的转速和转矩,实现牵伸的精确控制,从而改善产品的拉伸性能。
其次,伺服控制器在织造工艺中的应用也非常重要。
在织造过程中,织布机通过提纬、穿梭等动作完成编织工作。
而伺服控制器可以实现对提纬轴、穿梭轴等关键部件的控制,精确地控制织布机的运动速度和位置,从而实现织造的精密控制。
此外,伺服控制器还可以通过优化控制算法,提高织布机的工作效率和稳定性,减少产生次品的概率,降低生产成本。
再次,伺服控制器在纺织印染机械中的应用也愈发重要。
在染整和印花工艺中,对颜色的精准控制是非常关键的。
传统的颜色控制方法主要依靠手工调整染料的用量和工艺参数,但是这种方式受制于人力主观因素,很难做到精确控制。
而采用伺服控制器可以实现对染色机械和印花机械的涂料量、印版角度等参数的精确控制,从而有效提高产品的染色和印花质量,并且节约染料和其他原材料的使用量。
最后,伺服控制器在纺织机械中还可以应用于其他各种工艺过程中,如纺织品的分拣、包装等。
通过快速反馈和高精度控制,伺服控制器可以提高纺织机械的生产效率和产品质量,减少人力消耗,降低生产成本。
总结起来,伺服控制器在纺织机械中的应用非常广泛且重要。
通过精确控制纺织机械的运动和参数,伺服控制器可以实现纺织工艺的精细化控制,提高产品的质量和效率。
随着技术的不断发展,伺服控制器的应用前景将更加广阔,为纺织行业的发展带来更多的机遇和挑战。
伺服电机在纺织机械中的应用
伺服电机在纺织机械中的应用在现代工业中,伺服电机作为一种高性能、高响应的动力装置,在各个领域得到了广泛的应用。
尤其在纺织机械行业,伺服电机的应用更是不可或缺的。
本文将探讨伺服电机在纺织机械中的应用及其优势。
一、伺服电机的特点伺服电机是一种能够精确控制旋转角度、速度和位置的电机。
其具有高精度、高响应速度、低惯量和高效率等特点,适用于各种需要精密控制的场合。
在纺织机械中,各种工艺的要求复杂多样,因此需要一种能够灵活调节的动力设备,而伺服电机恰好能够满足这一需求。
二、1. 电子织机在电子织机中,伺服电机被广泛应用于控制纬纱、纬密和提花等工艺。
通过精确的位置控制,能够保证织机的稳定运行,并提高织物的质量和生产效率。
2. 缝纫设备在缝纫设备中,伺服电机主要用于控制缝纫头上的移动,在各种缝纫工艺中起到至关重要的作用。
通过伺服电机的精确控制,能够实现不同样式的缝纫,提高缝纫机的稳定性和生产效率。
3. 大型织机在大型织机中,伺服电机被广泛应用于控制织机上的织纱和提花等工艺。
通过对织机进行精准的控制,能够保证织物的质量和工艺效果,提高生产效率和节约能源。
三、伺服电机在纺织机械中的优势1. 高精度伺服电机具有高精度的位置控制和速度控制能力,能够满足纺织机械对精密度的要求,保证产品的质量。
2. 高响应速度伺服电机的响应速度快,能够快速调整转速和位置,适应不同工艺的需求,提高生产效率。
3. 低惯量伺服电机的惯量小,能够实现快速启停和快速加减速,减少能源消耗,提高节能效果。
4. 高效率伺服电机具有高效率的转换能力,能够将电能转化为机械能,减少能量损耗,提高生产效益。
综上所述,伺服电机在纺织机械中具有重要的应用和优势,能够满足纺织行业对精密度、效率和节能的需求,推动纺织机械的进步和发展。
随着科技的不断进步,相信伺服电机在纺织机械中的应用前景将更加广阔。
伺服电机在纺织加工中的应用
伺服电机在纺织加工中的应用纺织行业是一个与人类生活密切相关的产业,而伺服电机作为一种高性能的电机设备,在纺织加工中扮演着重要的角色。
伺服电机以其精准的控制、高效的运转和稳定的性能,为纺织企业提供了技术支持和生产保障。
本文将探讨伺服电机在纺织加工中的应用,以期加深对这一领域的了解。
首先,伺服电机在纺织设备中的精密控制作用不可或缺。
纺织加工涉及到各种不同类型的织机、印染机等设备,这些设备需要精准的控制来保证产品的质量和效率。
而传统的马达往往无法满足对速度、力矩、位置等多参数的要求,而伺服电机正是以其在速度控制、位置控制、力矩控制等方面的优势而被广泛应用于纺织设备中。
通过对伺服电机的精准控制,纺织企业可以实现设备的智能化操作,提高生产效率和产品质量。
其次,伺服电机在纺织机械中的高效运转为纺织企业节约了大量的能源和生产成本。
传统的交流异步电机在速度控制、负载响应等方面存在较大的能耗问题,而伺服电机则以其高效能、低损耗的特点而备受青睐。
通过应用伺服电机,纺织企业可以实现设备的高效运转,减少了电能的浪费和生产成本的增加,为企业的可持续发展提供了有力的支持。
最后,伺服电机在纺织工业中的稳定性表现出色。
纺织产品对设备的稳定性要求极高,任何一点小的波动都可能导致产品的质量下降。
而伺服电机具有高精度、高稳定性的特点,可以保证设备在长时间运转中始终保持稳定的性能表现。
通过应用伺服电机,纺织企业可以降低设备的故障率,提高生产的稳定性和可靠性,为企业的生产经营提供了可靠的保障。
综上所述,伺服电机在纺织加工中的应用具有重要的意义和价值。
通过对伺服电机在纺织设备中的精密控制、高效运转和稳定性等方面的优势的充分发挥,不仅能够提高纺织企业的生产效率和产品质量,还可以节约能源、降低生产成本,为纺织行业的可持续发展做出更大的贡献。
相信随着科技的不断进步和创新,伺服电机在纺织行业中的应用将会呈现出更加广阔的发展前景。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
交流伺服在喷气织机经纱张力控制系统中的应用为提高织物质量并满足喷气织机高速、高性能要求,本文结合交流伺服系统高控制精度的特点,在ARM微控制器LPC2294的丰富硬件资源的基础上,研制了基于交流伺服系统的喷气织机经纱张力控制系统。
论文完成了伺服系统在经纱张力控制中的理论分析和整体设计,该系统能够满足喷气织机的高速和高精度要求,并能使经纱张力保持恒定。
To improve the fabric quality and meet the high-speed, high-performance requirements of air-jet looms, an ACservo-based air-jet loom warp tension control system was designed grounding on the AC servo system’s high control accuracy and ARM microcontroller LPC2294. Theoretical analysis and integrated design of servo system in terms of the warp tension design were completed. The system can satisfy the high-speed and high-performance requirements of air-jet looms, and can maintain the tension stability of warps.喷气织机完成经、纬纱线的交织需由提综、引纬、打纬、送经、卷取五大运动的有机配合以及其他辅助运动的配合,整个运行过程控制复杂。
从经轴到卷布辊的整个织造过程中,受织机各大运动的影响,经纱张力呈周期性变化。
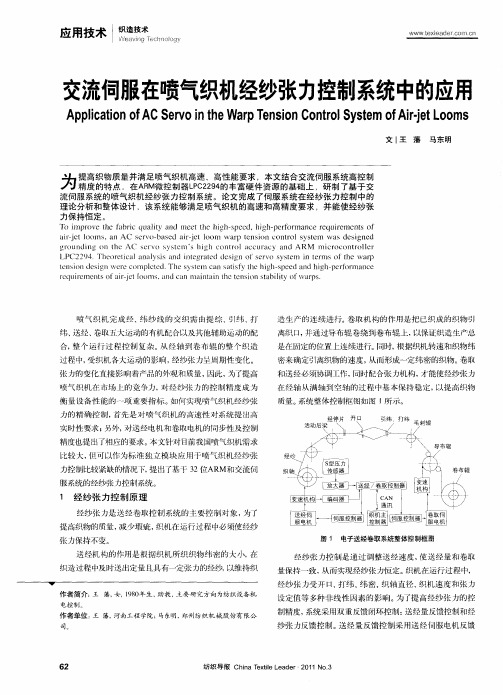
张力的变化直接影响着产品的外观和质量,因此,为了提高喷气织机在市场上的竞争力,对经纱张力的控制精度成为衡量设备性能的一项重要指标。
如何实现喷气织机经纱张力的精确控制,首先是对喷气织机的高速性对系统提出高实时性要求;另外,对送经电机和卷取电机的同步性及控制精度也提出了相应的要求。
本文针对目前我国喷气织机需求比较大,但可以作为标准独立模块应用于喷气织机经纱张力控制比较紧缺的情况下,提出了基于32 位ARM和交流伺服系统的经纱张力控制系统。
1经纱张力控制原理经纱张力是送经卷取控制系统的主要控制对象,为了提高织物的质量,减少瑕疵,织机在运行过程中必须使经纱张力保持不变。
送经机构的作用是根据织机所织织物纬密的大小, 在织造过程中及时送出定量且具有一定张力的经纱, 以维持织造生产的连续进行。
卷取机构的作用是把已织成的织物引离织口,并通过导布辊卷绕到卷布辊上,以保证织造生产总是在固定的位置上连续进行。
同时,根据织机转速和织物纬密来确定引离织物的速度,从而形成一定纬密的织物。
卷取和送经必须协调工作,同时配合张力机构,才能使经纱张力在经轴从满轴到空轴的过程中基本保持稳定,以提高织物质量。
系统整体控制框图如图 1 所示。
经纱张力控制是通过调整送经速度,使送经量和卷取量保持一致,从而实现经纱张力恒定。
织机在运行过程中,经纱张力受开口、打纬、纬密、织轴直径、织机速度和张力设定值等多种非线性因素的影响。
为了提高经纱张力的控制精度,系统采用双重反馈闭环控制:送经量反馈控制和经纱张力反馈控制。
送经量反馈控制采用送经伺服电机反馈的编码器的值求出伺服电机的实际回转角,得到实际的送经量,把它与根据织物纬密计算所得的送经量进行比较,并根据偏差值调节送经电机的转速,以位置反馈控制方式取得速度的高精度控制效果,以确保送经量的恒定。
经纱张力反馈控制是通过主轴旋转一周期内采集9 次张力传感器的值,求其平均值作为经纱张力的实际有效值,经模糊参数自整定PID控制器调节送经伺服电机的转速,从而达到对经纱张力的调节。
2系统硬件设计2.1整体设计方案针对喷气织机的高速和高精度特性,本设计采用ARM7TDMI-S构架的LPC2294作为系统控制器,并采用高精度的伺服电机控制织轴和卷布辊的转速。
同时,该经纱张力控制器作为一个独立控制模块与织机主控器通过CAN总线进行信息通讯。
LPC2294是基于一个支持实时仿真和跟踪的16/32 位微控制器,并带有256 kB嵌入的高速Flash存储器,具有丰富的外围功能模块。
6 路PWM输出可作为伺服电机的控制信号;8 路10 位ADC模块可直接对S型张力传感器进行模拟信号的采集;4 路CAN用于与织机其他控制器间的信息通讯;高速I2C接口用于对片外64 K的FRAM进行工艺参数和状态信息的读写;多个外部中断、以及实时时钟和看门狗可用于提高系统的实时性和软件抗干扰能力。
该系统硬件设计采用模块化设计方法,便于系统调试,对织轴和卷布辊的转速控制采用交流伺服系统,通过调节送经电机的转速,消除织机在运行过程中各运动机构对张力的影响,以保持经纱张力的动态恒定。
系统主要包括主控制器最小系统模块、张力检测模块、送经伺服控制模块、卷取伺服控制模块、人机交互模块、信号指示模块、CAN通讯模块。
系统整体控制框图如图 2 所示。
如果织物的纬密等参数改变,可通过触摸屏或由织机主控制器通过CAN总线进行张力等参数设置。
控制器会将这些参数保存到片外存储器的指定位置,以便下次开机时可自动进行读取。
控制器根据织物的纬密等参数计算出送经和卷取电机的转速,由于在运行过程中经纱张力受打纬运动、开口运动等因素的影响,不能保持恒定。
为了提高织物的质量,减少瑕疵,通过安装在活动后梁的S型张力传感器来实时采集经纱的实际张力值,与设定张力比较判断。
如果张力在允许的范围内变化,通过模糊自适应控制器来调节送经电机的转速,使送经电机的线速度保持恒定。
如果张力超出允许的张力值,应及时进行报警处理,并通过CAN总线与织机主控制器进行信息通讯,提示主控制器关掉系统电源。
对于卷取电机,因卷布辊的直径不变,对同一批次的织物,织物的纬密不变,因此卷取速度也应保持不变,卷取电机就相当于一个电子齿轮,以恒定的速度将织物引离织机,保持经纱张力恒定,并使织机正常连续地工作。
2.2交流伺服系统通过对喷气织机的性能分析以及对伺服电动机的参数要求,本设计选用三菱MR -E系列的70A ? KH003型号的交流伺服电机作为送经和卷取控制电机,此伺服电机采用分辨率10 000 脉冲/r的增量位置编码器,可进行高密度定位。
电机额定转速为3 000 r/min,最高转速可达 4 500 r/min,完全满足喷气织机的高速、高精度要求。
MR ? E系列伺服电机的控制模式有位置控制模式和速度控制模式,结合经纱张力控制系统的实际要求,本设计采用位置控制模式。
运用此方法不仅控制精度高,而且控制简单,可通过改变输入脉冲的频率来调整电机的转速,通过改变符号位的电平来实现电机的方向控制。
并采用直接负载外环检测位置信号,此时的电机轴端的编码器只检测电机转速,位置信号则由安装在织机主轴上的光电编码器来提供,这样的优点在于可以减少中间传动过程中的误差,增加了整个系统的定位精度。
根据织物的上机纬密、卷布辊直径、经轴直径、织机主轴的转速及传动机构的传动比,可计算出卷取电机及送经电机的理想转速。
根据伺服电机的线数可计算出每分钟送经电机所需要的脉冲数,求得控制伺服电机的脉冲频率,通过改变该脉冲频率的大小即可改变电机的转速。
对于每一台织机,其转速和卷布辊的直径都是固定不变的,因此一旦织物的纬密确定,卷取电机就相当于一个精密的电子齿轮。
对应于伺服控制系统来说,在织物纬密不变的情况下,控制卷取电机的脉冲频率保持不变。
只有在点动卷绕和退绕的情况下,改变卷取电机的控制脉冲频率。
通过对织物纬密等参数的设置,控制器可计算出卷取电机的转速及控制卷取电机的PWM信号频率,该频率在生产一批织物时保持不变。
而对于送经电机的控制则复杂得多,在张力正常的情况下,其控制脉冲频率与卷取电机相同,当张力变大或变小时,需在模糊自适应PID的调节过程中通过改变脉冲频率来调节送经电机的转速,从而保持张力恒定。
3软件设计3.1控制系统嵌入式操作系统中μC/OS ? II具有执行效率高、占用空间小、实时性能优良、可扩展性强、移植简单等优点,且进程调度具有可剥夺性。
针对喷气织机经纱张力控制系统,使用可剥夺型内核可使得实时性要求较高的任务尽可能得到快捷、有效的处理,因此,设计采用μC/OS ? II嵌入式操作系统。
本设计以满足系统的实时性要求为首要目标,并在简化软件系统和降低资源需求的前提下,并根据系统硬件结构框图,将系统软件控制任务进行合理划分(图3)。
并开通定时器1中断和外部中断1来触发关键任务,以保证关键任务的实时性。
送经伺服电机采用的是位置控制模式,所以PWM的占空比对电机的转速没有影响,通过调节PWM的频率来调节电机的转速。
频率越大,电机的转速越高。
通过对张力传感器测得的实际经纱张力输入给模糊自适应PID控制器,调节PWM信号的频率,从而改变送经电机的转速,使经纱张力保持基本恒定。
3.2张力模糊自适应PID控制结构为了实现纬密一定时,经纱张力保持在一个恒定的范围之内,就要满足送经轴在多种非线性因素的影响下与导辊保持线速度一致。
而对于变纬密控制,纬密与张力值的对应关系可通过专家经验值存储到控制器内,一旦改变织物的纬密,可通过查表求得此纬密所对应的经纱张力设定值,从而实现自动变纬密模糊参数自适应PID控制。
本设计采用S型张力传感器在喷气织机织造过程中不断检测经纱张力值,经过控制器采集、处理后作为当前实际经纱张力值,控制系统以实际经纱张力值与根据纬密通过查表所得的设定张力值比较,所得E和EC为输入量输入给模糊自适应PID控制器,伺服电机为控制对象,输出一定频率的脉冲信号到伺服系统,控制带动送经轴的伺服电机的转速,以提高控制精度。
张力模糊控制系统原理框图如图4所示。
采样点的不同对采集到的经纱张力影响很大,为了避开打纬时的峰值张力以及减少开口运动时经纱张力的波动,本文利用织机主轴光电编码器所反馈的主轴角度信号,取打纬角度的前后30°~120°的张力值,每45°采集一次,取其平均值作为工作周期经纱张力的实际有效值。
对于模糊PID调节,其周期的选取将影响到张力调节的效果,张力调节周期的选取遵循以下原则:(1)根据香农采样定理,系统采样频率ƒs应大于等于被采样信号最高频率ƒmax的 2 倍,即ƒs ≥2ƒmax;(2)从执行机构的特性要求来看,有时需要输出信号保持一定的宽度,因此,采样周期必须大于这一时间;(3)从控制系统的随动和抗干扰的性能来看,要求采样周期尽可能的短;(4)当系统滞后占主导地位时,应使滞后时间为采样周期的整数倍。