大学物理第一章--质点运动学
大学物理第1章质点运动学
大学物理第1章质点运动学质点运动学是物理学中研究物体运动的学科,它是物理学的一个重要分支,是学习物理的基础之一。
一、质点运动学的概念质点运动学是研究质点运动的学科,它把物体看作质点,即把物体看成一个点,而不考虑其体积大小。
质点运动学的主要研究内容包括:位置、速度、加速度等运动量的描述,以及运动的曲线形状、动量、能量等方面的分析。
二、质点的运动质点的运动可以分为匀速运动和非匀速运动两种情况。
1.匀速运动匀速运动是指质点在单位时间内沿着同一直线等距离地移动的运动。
匀速运动的速度大小是恒定的,可以用速度公式v=d/t来计算。
2.非匀速运动非匀速运动是指质点在单位时间内沿任意曲线路径移动的运动。
非匀速运动中质点的速度大小是变化的,需要用微积分的方法进行分析和计算。
三、质点运动中的基本物理量在质点运动中,需要描述质点的运动状态和变化情况。
主要的量包括:1.位置位置是指质点在空间中所处的位置,通常使用坐标表示。
我们可以通过坐标系建立一个参照系,来描述质点的位置。
2.位移位移是指质点从一个位置到另一个位置的距离和方向,通常用符号Δr表示。
位移的大小可以用位移公式Δr=r2-r1来计算。
3.速度速度是指质点在单位时间内所改变的位置,通常用符号v 表示。
速度的大小可以用速度公式v=Δr/Δt来计算。
4.加速度加速度是指质点在单位时间内速度所改变的量,通常用符号a表示。
加速度的大小可以用加速度公式a=Δv/Δt来计算。
四、质点的曲线运动在质点运动中,一些运动路径可能是曲线运动。
曲线运动的路径通常可以用弧长s、曲率半径r、圆心角等来表征。
1.弧长弧长是指质点在曲线路径上所走过的曲线长度,通常用符号s表示。
弧长的大小可以用弧长公式s=rθ来计算。
2.曲率半径曲率半径是指曲线在任一点上的曲率半径,通常用符号r 表示。
曲率半径可以根据曲线的形状计算得出。
3.圆心角圆心角是指质点所在的路径所对应的圆所对应的圆心角度数,通常用符号θ表示。
第1章 质点运动学
100t
4
t3
0
3
x x0
t
t0 vx (t)dt 0
t
(100t
4
t3 )dt
50t 2
1
t4
0
3
3
第一章 质点运动学
1-5 曲线运动
一、匀速圆周运动
1、匀速圆周运动的加速度
A v B
vA B vB
设质△|量=圆点 t|时vvv周处|存'刻。的在在,质半圆。v质点径周根点从为上据在PR点的加Q,运P处速处圆动,度,心到速的速为Q度定度O点为义,为有vv可v在,速;' 得t其度时在瞬中增刻t+时|,v
解:由
a
ann a
v2 R
n
dv dt
v
ds dt
20
0.6t 2 (m
/
s)
当t=1s时
an
v2 r
(20 0.6)2 200
m / s2
1.88m / s2
a
dv dt
1.2t
1.2m / s2
a a2 an2 2.23m / s2
dt
v0 v
0
v
v e(1.0s1 )t 0
由速度的定义: v
dy dt
v e(1.0s1 )t 0
y
t
dy v0 e dt (1.0s1 )t
y 10 1 e( 1.0s1 )t
0
0
由以上结果, t 时, v 0,此时y 10m。
但实际情况是:t 9.2s时, v 0,此时y 10m。
加速度分量
加速度大小 加速度余弦方向
a | a| a2x a2y a2z
大学物理习题册及解答第二版第一章质点的运动
7 汽车在半径为200m的圆弧形公路上刹车,刹车开始阶段的路程
随时间的变化关系为 S 20t 0.2t3(SI),汽车在t=1s时的切向加速
度
,法向加速度大小为 ,加速度的大小和方向为
和
。
at
d 2S dt 2
1.2t
1.2m / s2
an
2
R
1 dS R dt
2
(20 0.6t 2 )2 R
第一章 质点的运动(一)
一、选择题
1 某质点作直线运动的运动学方程为x=3t-5t3+6(SI),则
该质点作 (A)匀加速直线运动,加速度沿x轴正方向. (B)匀加速直线运动,加速度沿x轴负方向. (C)变加速直线运动,加速度沿x轴正方向. (D)变加速直线运动,加速度沿x轴负方向.
2
一质点在某瞬时位于位矢 r(
2
4 一质点沿x方向运动,其加速度随时间变化关系为a =3+2t(SI) , 如果初始时质点的速度v0为5m/s,则当t为3s时,质点的速度v
=_2__3_m_/_s_
5.一质点作半径为 0.1 m的圆周运动,其角位置的运动学方程为:
π
1 t2
(SI)
42
则其切向加速度为 a
R
R d 2
0.1m / s2
定要经过2m的路程. (B) 斜向上抛的物体,在最高点处的速度最小,加速度最大. (C) 物体作曲线运动时,有可能在某时刻的法向加速度为零. (D) 物体加速度越大,则速度越大.
3. 在相对地面静止的坐标系内, A、B 二船都以3m/s 的速率匀
速行驶, A 船沿x轴正向, B船沿y轴正向,今在船 A 上设置与静
(A)
1 2
(完整版)大学物理01质点运动学习题解答
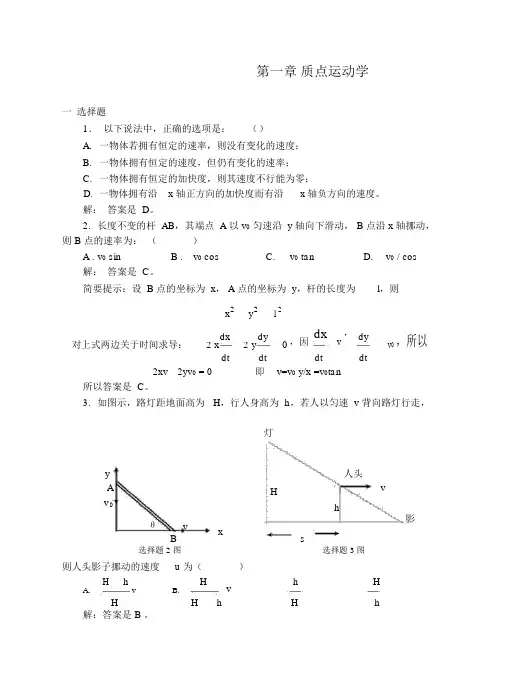
第一章质点运动学一选择题1.以下说法中,正确的选项是:()A.一物体若拥有恒定的速率,则没有变化的速度;B.一物体拥有恒定的速度,但仍有变化的速率;C.一物体拥有恒定的加快度,则其速度不行能为零;D. 一物体拥有沿x 轴正方向的加快度而有沿x 轴负方向的速度。
解:答案是 D。
2.长度不变的杆 AB,其端点 A 以 v0匀速沿 y 轴向下滑动, B 点沿 x 轴挪动,则 B 点的速率为:()A . v0 sinB .v0 cos C.v0 tan D.v0 / cos解:答案是 C。
简要提示:设 B 点的坐标为 x, A 点的坐标为 y,杆的长度为l,则x2y2l 2对上式两边关于时间求导:dx dy0,因dxv,dyv0,所以2 x 2 ydtdt dt dt2xv2yv0 = 0即v=v0 y/x =v0tan所以答案是 C。
3.如图示,路灯距地面高为 H,行人身高为 h,若人以匀速 v 背向路灯行走,灯y人头A H vv0hθvx影sB选择题 3图选择题 2图则人头影子挪动的速度u 为()H h Hv h HA.vB.H H h H h 解:答案是 B 。
简要提示:设人头影子到灯杆的距离为 x ,则x s h , x Hs , x H H hdx H ds HvuH h dt Hdt h所以答案是 B 。
4. 某质点作直线运动的运动学方程为x = 3t-5t 3 + 6 (SI),则该质点作A. 匀加快直线运动,加快度沿 x 轴正方向.B. 匀加快直线运动,加快度沿 x 轴负方向.C. 变加快直线运动,加快度沿 x 轴正方向.D. 变加快直线运动,加快度沿x 轴负方向.()解: 答案是 D5. 一物体从某一确立高度以v 0 的初速度水平抛出,已知它落地时的速度为v t ,那么它的运动时间是: ()v t - v 0v t v 0v t2 22v v 0 v t A.B.C.gD.2 gg2 g解:答案是 C 。
大学物理第1章质点运动学的描述
t0
0 2 4
t 2s 4
2
t 2s
x/m
6
-6 -4 -2
例3 如图所示, A、B 两物体由一长为 l 的刚性 细杆相连, A、B 两物体可在光滑轨道上滑行.如物体 A以恒定的速率 v 向左滑行, 当 60 时, 物体B的 速率为多少? 解 建立坐标系如图, 物体A 的速度
1. 5 arctan 56.3 1
(2) 运动方程
x(t ) (1m s )t 2m
y(t ) ( m s )t 2m
1 4 2 2
1
由运动方程消去参数
1 -1 2 y ( m ) x x 3m 4
轨迹图
t 4s
6
t 可得轨迹方程为
y/m
三、位置变化的快慢——速度
速度是描写质点位置变化快慢和方向的物理量,是矢量。
速率是描写质点运动路程随时间变化快慢的物理量,是标量。 1 平均速度 在t 时间内, 质点从点 A 运动到点 B, 其位移为
B
y
r r (t t) r (t)
r (t t)
s r
质点是经过科学抽象而形成的理想化的物理模 型 . 目的是为了突出研究对象的主要性质 , 暂不考 虑一些次要的因素 .
二、位置矢量、运动方程、位移
1 位置矢量
确定质点P某一时刻在 坐标系里的位置的物理量称 . 位置矢量, 简称位矢 r
y
y j
r xi yj zk
j k 式中 i 、 、 分别为x、y、z
xA xB xB x A
yB y A
o
x
经过时间间隔 t 后, 质点位置矢量发生变化, 由 始点 A 指向终点 B 的有向线段 AB 称为点 A 到 B 的 位移矢量 r . 位移矢量也简称位移.
大学物理第1章质点运动学ppt课件
大学物理第1章质点运动学ppt课件•质点运动学基本概念•直线运动中质点运动规律•曲线运动中质点运动规律•相对运动中质点运动规律目录•质点运动学在日常生活和工程技术中应用•总结回顾与拓展延伸质点运动学基本概念01质点定义及其意义质点定义用来代替物体的有质量的点,是一个理想化模型。
质点意义突出物体具有质量这一要素,忽略物体的大小和形状等次要因素,使问题得到简化。
参考系与坐标系选择参考系定义为了研究物体的运动而选作标准的物体或物体系。
坐标系选择为了定量描述物体的位置及位置的变化,需要在参考系上建立适当的坐标系。
常用的坐标系有直角坐标系、极坐标系、自然坐标系等。
位置矢量与位移矢量位置矢量定义从坐标原点指向质点的矢量,用r表示。
位移矢量定义质点从初位置指向末位置的有向线段,用Δr表示。
质点在某时刻的位置矢量对时间的变化率,即单位时间内质点位移的矢量,用v 表示。
速度定义加速度定义速度与加速度关系质点在某时刻的速度矢量对时间的变化率,即单位时间内质点速度的变化量,用a 表示。
加速度是速度变化的原因,速度变化快慢与加速度大小成正比,方向与加速度方向相同。
速度加速度定义及关系直线运动中质点运动02规律匀速直线运动特点及应用特点质点在直线运动中,速度大小和方向均保持不变。
应用描述物体在不受外力或所受合外力为零的情况下的运动状态。
匀变速直线运动规律探究定义质点在直线运动中,加速度大小和方向均保持不变。
运动学公式包括速度公式、位移公式和速度位移关系式,用于描述匀变速直线运动的基本规律。
定义物体在重力的作用下从静止开始下落的运动。
运动学公式包括位移公式、速度公式和速度位移关系式,用于描述自由落体运动的基本规律。
运动特点初速度为零,加速度为重力加速度,方向竖直向下。
自由落体运动分析竖直上抛运动过程剖析定义物体以一定的初速度竖直向上抛出,仅在重力作用下的运动。
运动特点具有竖直向上的初速度,加速度为重力加速度,方向竖直向下。
大 学 物 理 教 案第1章 质点运动学
1三、坐标系为了定量描述物体的运动,还需要在参考系上建立适当的几何框架即坐标系。
常用的有直角坐标系、极坐标系、自然坐标系、球坐标系等。
四、物理模型——质点实际物体都有大小和形状,一般说来,运动情况很复杂,但是,如果物体的大小和形状在所研究的问题中不起作用或作用很小,就可以忽略其大小和形状,而把它抽象为一个只有质量的几何点—质点。
应用质点模型的条件为:(1)当物体运动的空间范围r 远大于物体自身线度l 时; (2)物体只作平动时。
§1.2 位置矢量 位移 速度 加速度一、描述质点运动的物理量1、位置矢量由坐标原点引向考察点的矢量,简称位矢,用r 表示。
在直角坐标系中为 r = x i + y j + z k ,r 222z y x ++=;r 的方向余弦是r xcos =α, r ycos =β,rzcos =γ。
在平面极坐标系中在自然坐标系中 r = r (s )。
运动方程描写质点的位置随时间变化的函数关系式称为运动方程。
记为x = x (t ),y = y (t ),z = z (t ) r = r (t ), s = s (t )。
例1: 如质点作圆周运动时,有 x = cos r t ω,y =sin r t ω消去时间t ,就得轨道方程 222x y r +=。
2、位移和路程位移r ∆r = r r 0,vYx rt ω 0y 例1-1 图(1)定义:12rrr-=∆,注意:(1)增量的模r∆与模的增量r∆不是同一个量;(2)位移在直角坐标系中的表示式为=∆r xi∆+y∆j+z∆k。
路程s∆:t∆时间内质点在空间内实际运行的路径距离位移和路程的比较与联系:(1)不同处..r;.r.absc s⎧⎪∆--⎪⎨∆--⎪⎪∆≠∆⎩矢量与标量,仅由始未位置决定与轨道形状无关与轨道形状及往返次数有关;在一般情况下(2)联系在t∆→0时,d=r d s,但仍然d d r≠r。
3、速度平均速度trv∆∆=与平均速率tsv∆∆=(1)、在一般情况下平均速度大小不等于平均速率vv≠.(2)、v在直角坐标系中的表示式x y zt t t∆∆∆∆∆∆=++v i j k瞬时速度dlimt dtr rvt∆∆∆→==v v与瞬时速率dlimdts svt t∆∆∆→==的关系:(1)、瞬时速度大小d dd dSvt t===rv,等于瞬时速率dtdsv=。
大学物理第一章质点运动学习题
1 2 间的关系为= v0t − bt ( SI)。 s 2,质点加速度的大小和方向。 求:(1) 任意时刻t,质点加速度的大小和方向。 任意时刻
求:
a
α
r aτ
R
R
τ
dt
r an
4
a = an + aτ =
2 2
(v0 − bt )4 + (− b )2
R2
r (v 0 − bt ) an a 与切向轴的夹角为 α = arctg = arctg (− Rb ) aτ
v v v v dr 解:v = = 2i − 2tj dt v v v v v t = 2 v2 = 2i − 4 j t = 0 v0 = 2i
v2 = 22 + 42 = 4.47m/ s 大小: 大小:
−4 方向: 方向: θ = arctan = −63o26′ 2
θ为 2与 轴的夹角 v x
x = −t 2 (SI)
例5:一质点运动轨迹为抛物线 : 求:x= -4m时(t>0)粒子的 时 粒子的 速度、速率、加速度。 速度、速率、加速度。 解: x= -4m时 t=2s 时
x t =2 dx vx = −4m s vx = = −2t dt t =2 dy 3 vy = −24m s vy = = −4t + 4t dt v v v 2 v = vx + v2 = 4 37 m s v = −4i − 24 j m/ s y 2 dvx d x −2 ax = s = = −2m ay = −12t 2 + 4 = −44(m −2 ) s 2 dt dt v v r a = −2i − 44 j m⋅ s−2
y = −t 4 + 2t 2(SI)
第一章 质点运动学
z
r rA rB
B
y
平均速度的方向与t时间内位移的方向一致。
§1-2 质点运动的描述
第1章 质点运动学
A
2. 瞬时速度(速度) 能精细地描述 z 质点在某时刻的运动情况。 r dr v lim O t d t t 0 x 速度的方向为轨道上质点所在
处的切线方向。
r rA rB
B
dr dx dy dz v i j k dt dt dt dt
v
r
2 z
y
A
B
v vx i v y j vz k
速度的大小: v v
dx dy dz vx , v y , vz dt dt dt
§1-2 质点运动的描述
第1章 质点运动学
速度(speed)----描述质点运动的快慢和方向。
定义:单位时间内质点所发生的位移。 1. 平均速度(mean speed) 设质点:
A
t 时刻: A, rA t t 时刻: B, rB O 位移: r x r 平均速度: v 单位:ms-1 t
大小: r
单位矢量:i , j , k
2 2
r
x y z
2
x y z 方向: cos cos cos r r r
cos cos cos 1
2 2 2
特性:矢量性、 瞬时性、相对性
§1-2 质点运动的描述
第1章 质点运动学
2. 运动方程(equation of motion): 质点运动时位置随时 间变化的规律。 z
ax 0 (2) x : vx 5 y : v y 15 10t a y 10 g
大学物理之质点运动学
矢量性:注意矢量和标量的区别。 相对性:对不同参照系有不同的描述。
3.运动学方程是运动学的核心,包含了运动的全部信息。
运动学的两类问题 运动方程是运动学问题的核心 1、已知运动方程,求质点任意时刻的位置、速度 以及加速度
r r t
dr v dt
2 dv d r a 2 dt dt
第一章 质点运动学 §1-1 质点、参考系 、坐标系
一、质点
1. 引入 质点的概念是考虑主要因素而忽略次要因素引入的一个理想 化的力学模型,使研究的问题得到简化。 2. 概念
质点是一个理想化的力学模型,当物体的大小和形状忽略不 计时,可以把物体当做只有质量没有形状和大小的点。 3.说明 一个物体能否当做质点,并不取决于它的实际大小,而是 取决于研究问题的性质。
大小:
方向:
2)相对性: 例如:坐在运动汽车中的人,选车厢为参考系,人位 移为零,但如选择地面为参考系位移不为零。 3)单位:米(m) 2.位移与路程的区别 位移是矢量:是指位置矢量的变化; 路程是标量:是指运动轨迹的长度。
思考:位移的大小什么时候与路程相等?
3. 区分:
三、速度(描述质点位置随时间变化的快慢和方向的物理量 )
速度大小的变化率,其方向指向曲线的切线方向
切向加速度:
dv d s a e 2 e h dt dt
2
讨论
de dt
O
Δ
e t t
e e (t t ) - e (t )
当: t 0 , 0 有
e e
s
求:1、任意时刻 t 速度
2、切向加速度的大小
1-2-6 圆周运动及其角量描述
平面极坐标系