车载导航系统构架及
车智慧定位系统设计方案

车智慧定位系统设计方案车智慧定位系统是一种集成了GPS定位、地图导航、车辆监控等功能的智能化系统,能够实时监控车辆的位置、状态、路径等信息,并进行相关的分析和管理。
本文将介绍车智慧定位系统的设计方案,包括系统架构、功能模块和实施方案等。
一、系统架构车智慧定位系统的架构可以分为四层:物理层、传输层、应用层和服务层。
1. 物理层:包括车载终端设备、GPS定位设备和传感器等硬件设备。
车载终端设备用于接收和处理GPS信号,同时也可以与其他传感器进行数据交互。
2. 传输层:通过无线网络将车辆位置、状态等信息传输到中心服务器。
可以选择使用4G/5G网络、蜂窝网络或者卫星通信等方式进行数据传输。
3. 应用层:包括地图导航、车辆监控、路径规划等功能模块。
地图导航模块可以实时显示车辆位置和路线、提供导航指引。
车辆监控模块可以实时监控车辆的状态、行驶轨迹等。
路径规划模块可以根据需求自动规划最优的行驶路径。
4. 服务层:提供云端服务器、数据存储和分析等服务。
云端服务器用于接收和处理车辆上传的数据,对车辆进行管理和分析。
数据存储可以将车辆的位置、状态等信息进行长期存储。
数据分析可以根据用户需求进行数据挖掘和分析。
二、功能模块车智慧定位系统包括以下功能模块:1. 实时定位:通过GPS定位设备实时获取车辆的位置信息,并在地图上进行显示。
2. 地图导航:根据车辆的位置和目的地,在地图上显示最优的行驶路线,并提供导航指引。
3. 车辆监控:实时监控车辆的状态,包括车速、油耗、故障等信息,并进行报警提醒。
4. 路径规划:根据车辆的起点、终点和路径限制等因素,自动规划最优的行驶路径。
5. 数据分析:对车辆的位置、状态等信息进行挖掘和分析,提供相关的报表和统计数据。
三、实施方案1. 硬件设备:选择可靠的车载终端设备和GPS定位设备,确保其稳定性和精准度。
2. 数据传输:选择稳定的数据传输方式,如4G/5G网络、蜂窝网络或者卫星通信,确保数据的实时传输和安全性。
GPS车辆导航监控系统架构及其移动端的研究与设计
来。 然而就目 前我国gps 导航领域总体而言, 应用技术还不是很成熟,
虽然也出现一些我国自主研制的导航产品, 但是功能不是很完善, 所以 在这里提出了一个关于如何建立集监控, 导航于一身的比较完善的系
统。
1 系统 架构
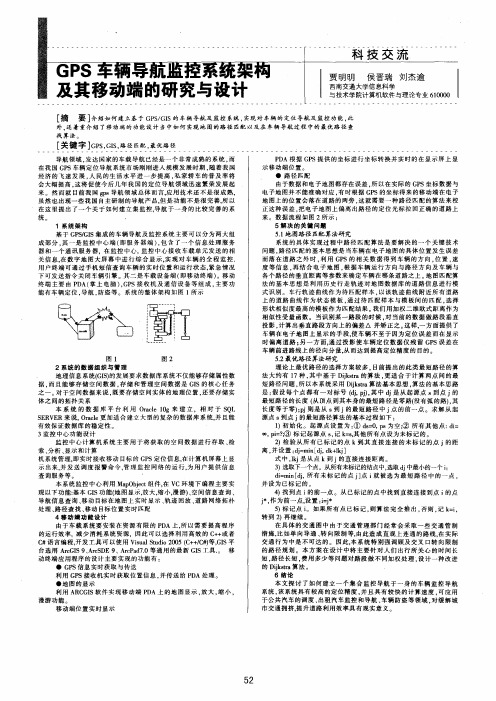
由于数据和电子地图都存在误差, 所以在实际的GPS 坐标数据与 电子地图并不能准确对应, 有时根据GPS 的坐标得来的移动端在电子 地图上的位置会落在道路的两旁, 这就需要一种路径匹配的算法来校 正这种误差, 把电子地图上偏离出路径的定位光标拉回正确的道路上 来。数据流程如图2 所示:
科技交流
〔 要」 绍 何 立 摘 介 如 建 墓于G IS的 辆 航 监 统,现 车 的 位 航 监 功 此 PS/G 车 导 及 控系 实 对 辆 定 导 及 控 能,
外, 还着重介绍了 移动端的功能设计当中如何实 现地图的路径匹配以及在车辆导航过程中的最 优路径查
找 算法 。
[关键字」PS,G 路 匹 ,优 径 G IS,径 配 最 路
5 解决的关钮问题
基于 GPS/GIS 集成的车辆导航及监控 系统主要可 以分为两大组
Hale Waihona Puke 成部分, 其一是监控中心端( 即服务器端) , 包含了一个信息处理服务 器和一个通讯服务器, 在监控中心, 监控中心接收车载单元发送的相 关信息, 在数字地图大屏幕中进行综合显示, 实现对车辆的全程监控. 用户终端可通过手机短信查询车辆的实时位置和运行状态, 紧急情况 下可发送指令关闭车辆引擎。 其二是车载设备端( 即移动终端)。 移动 终端主要由PDA(掌上电脑) ,GPS 接收机及通信设备等组成, 主要功 能有车辆定位, 导航, 防盗等。系统的整体架构如图 1 所示
智能车载导航与路径规划系统设计与实现

智能车载导航与路径规划系统设计与实现智能车载导航与路径规划系统是一种基于人工智能技术的创新应用,它能够帮助驾驶员快速准确的找到目的地,并通过智能路径规划功能提供最优的行驶路线。
本文将探讨智能车载导航与路径规划系统的设计和实现。
一、需求分析智能车载导航与路径规划系统的设计首先需要进行需求分析,以确定系统的功能和性能需求。
主要的需求包括:1. 实时定位和地图显示:系统应能够实时获取车辆的位置信息,并在电子地图上显示出来。
2. 导航功能:根据用户输入的目的地信息,系统应该能够给出最佳路线,并提供语音导航提示。
3. 增强现实导航:系统可以通过摄像头获取道路环境信息,并通过AR技术将导航信息实时叠加在驾驶员的视野中。
4. 动态路径规划:系统能够根据实时的交通状况调整行驶路线,并提供可选择的备选路线。
5. 长途导航和路径规划:系统应支持长途导航和路径规划,能够根据用户的需求,规划出多个途径点的行驶路线。
6. 可操作性和易用性:系统应具备友好的人机交互界面,方便驾驶员进行操作。
二、系统架构设计基于以上需求分析,我们可将智能车载导航与路径规划系统分为四个模块,分别为定位和地图显示模块、导航模块、增强现实导航模块和路径规划模块。
1. 定位和地图显示模块:该模块负责获取车辆的实时位置信息,并将位置信息显示在电子地图上。
它包括GPS模块、地图接口模块和位置信息显示模块。
2. 导航模块:该模块是系统的核心,根据用户输入的目的地信息和定位模块提供的位置信息,计算出最佳的行驶路线,并提供语音导航提示。
它包括目的地输入模块、路线计算模块、语音导航模块和导航信息显示模块。
3. 增强现实导航模块:该模块通过摄像头获取道路环境信息,并通过AR技术将导航信息叠加在驾驶员的视野中,提供增强现实的导航功能。
它包括摄像头模块、图像处理模块和增强现实导航显示模块。
4. 路径规划模块:该模块负责根据实时的交通状况和用户的需求,进行动态路径规划,并提供备选的行驶路线。
汽车导航系统的工作原理
汽车导航系统的工作原理汽车导航系统是一种集导航、定位、地图等功能于一体的设备,它的工作原理是通过接收卫星信号定位、获取地图信息,并结合车辆的实时状态来为驾驶员提供导航指引。
汽车导航系统的工作原理主要包括以下几个步骤:1. 卫星定位:汽车导航系统通过接收卫星信号来实现定位功能。
目前主流的卫星导航系统有GPS(全球定位系统)、GLONASS(格洛纳斯)和Beidou(北斗导航系统),这些卫星分布在地球的各个轨道上,发射出的信号可以被汽车导航系统接收并解码。
通过接收多颗卫星的信号,汽车导航系统可以准确地计算出车辆的位置。
2. 地图信息获取:汽车导航系统需要获取地图信息,一方面用于显示地图,另一方面用于路径规划。
地图信息可以通过卫星地图、电子地图等形式来获取。
导航系统通常会预先将地图数据存储在设备的内存中,以便实时的计算和显示地图。
3. 路径规划:在获取到车辆的当前位置和目的地位置后,汽车导航系统会根据地图数据和导航算法来计算出最合适的行驶路线。
路径规划通常会综合考虑路况、行驶距离、时间等因素,以提供最优的导航方案。
4. 导航指引:根据路径规划的结果,汽车导航系统会为驾驶员提供相应的导航指引。
导航指引通常以语音提示和地图显示的形式呈现,驾驶员可以根据导航指引来及时调整行驶方向。
此外,汽车导航系统还可以根据车辆的实时状态来进行更精准的导航指引。
例如,当车辆在高速公路上行驶时,导航系统可以提前提示驾驶员准备车道变换或出口道路,以避免错过。
导航系统也可以结合交通信息,提供即时的路况信息,并提供避开拥堵的导航方案。
总结起来,汽车导航系统的工作原理是通过卫星定位获取车辆的位置,在地图数据的基础上进行路径规划,然后为驾驶员提供导航指引。
通过高精度的定位和实时的路况信息,汽车导航系统能够有效地帮助驾驶员规划行驶路线,提高驾驶安全性和行驶效率。
随着技术的不断发展,汽车导航系统的功能不断扩展,为驾驶者提供更加智能化、人性化的导航服务。
汽车导航是什么原理

汽车导航是什么原理汽车导航是一种通过卫星定位系统(GPS)来确定车辆位置,并通过地图数据计算出最佳路线,指导驾驶员到达目的地的系统。
汽车导航的原理主要包括卫星定位、地图数据和路线规划三个方面。
首先,卫星定位是汽车导航的基础。
GPS系统由一组24颗绕地球轨道运行的卫星组成,这些卫星能够不断地向地面发射无线电信号,接收这些信号的GPS接收机能够计算出自身的位置坐标。
汽车导航系统通过接收GPS信号,可以实时准确地确定车辆的位置,为后续的路线规划提供基础数据。
其次,地图数据是汽车导航系统的重要组成部分。
地图数据包括道路信息、地理地形、建筑物位置等内容,这些数据是由卫星遥感、测绘和地理信息系统等手段采集而来。
汽车导航系统会将GPS 定位的车辆位置与地图数据进行匹配,从而确定车辆所处的位置在地图上的具体位置,并且能够显示周围的道路、建筑物等信息,为驾驶员提供可视化的导航信息。
最后,路线规划是汽车导航系统的关键功能之一。
基于GPS定位和地图数据,汽车导航系统能够计算出最佳的行车路线,并且根据实时交通信息进行动态调整。
在路线规划过程中,系统会考虑到道路的实时交通情况、车速、路况等因素,为驾驶员提供最佳的行车路线,同时还会提前提示驾驶员需要转弯、变道等操作,帮助驾驶员顺利到达目的地。
综上所述,汽车导航的原理主要包括卫星定位、地图数据和路线规划三个方面。
通过这些原理的综合应用,汽车导航系统能够为驾驶员提供准确、实时的导航信息,帮助驾驶员安全、高效地到达目的地。
随着技术的不断进步,汽车导航系统的定位精度和路线规划能力将会得到进一步提升,为驾驶员的出行带来更加便利的体验。
基于Android平台的智能行车导航系统设计与开发

基于Android平台的智能行车导航系统设计与开发随着科技的不断发展,智能导航系统已经成为现代汽车行业中不可或缺的一部分。
而基于Android平台的智能行车导航系统更是在用户体验和功能性上有着明显的优势。
本文将介绍基于Android平台的智能行车导航系统的设计与开发过程,包括系统架构设计、功能模块实现、地图数据集成等方面。
一、系统架构设计在设计智能行车导航系统时,系统架构是至关重要的一环。
基于Android平台的智能行车导航系统通常可以分为前端和后端两部分。
前端主要包括用户界面设计、地图显示、路线规划等功能,而后端则负责数据处理、算法计算等核心功能。
1.1 前端设计在前端设计中,用户界面的友好性和易用性是首要考虑的因素。
通过Android平台提供的各种UI组件和交互方式,可以实现地图显示、搜索功能、路线规划等操作。
同时,还可以结合语音识别、手势控制等技术,提升用户体验。
1.2 后端设计后端设计主要涉及到数据处理和算法计算。
地图数据的存储和管理、路线规划算法的选择和优化都是后端设计中需要考虑的问题。
同时,为了提高系统的实时性和准确性,还需要考虑数据更新机制和网络通信方面的设计。
二、功能模块实现基于Android平台的智能行车导航系统具有丰富的功能模块,包括但不限于地图显示、路径规划、实时交通信息、语音导航等功能。
2.1 地图显示地图显示是智能行车导航系统中最基本也是最核心的功能之一。
通过集成地图SDK,可以实现地图的加载、缩放、拖动等操作,并在地图上显示POI点、路况信息等。
2.2 路径规划路径规划是智能行车导航系统中的重要功能之一。
通过选择合适的路径规划算法,并结合实时交通信息和用户偏好,可以为用户提供最优的驾驶路线。
2.3 实时交通信息实时交通信息可以帮助用户避开拥堵路段,选择更加畅通的道路。
通过集成第三方交通数据服务,可以获取实时路况信息,并在地图上进行展示。
2.4 语音导航语音导航是提高驾驶安全性和便利性的重要功能之一。
汽车定位导航系统课件
地面一个主控站、3个注入站、5个监测站
汽车定位导航系统
用户设备:
• 凡具有GPS接收机的用户都可接收到GPS 信号,都可使用GPS 系统。
汽车定位导航系统
GPS定位原理
汽车定位导航系统
汽车GPS系统
汽车定位导航系统
汽车定位导航系统
汽车定位导航系统
学习内容:
• 1、汽车定位导航概念 • 2、汽车定位导航方法 • 3、汽车定位导航系统
汽车定位导航系统
现代汽车的综合信息系统
• 随着新型传感器和电子显示器件的 不断涌现 以及计算机技术的发展, 汽车仪表从原来只能显示传感器信 息,发展成为由多个ECU组成能够 对各种信息进行分析、计算、加工 处理的综合信息系统。
汽车定位导航系统
汽车定位导航系统
一、汽车定位导航的概念
• 定位:给出汽车所在位置的相对或绝
对坐标。
• 导航:给汽车指示方向和路径信息。
导航需要定位,定位为了导航
汽车定位导航系统
二、汽车的定位导航系统
• 汽车导航的种类: 1、自主导航 2、GPS导航 3、混合导航
汽车定位导航系统
汽车导航系统如图所示:
汽车定位导航系统
2、车轮转速传感器
• 采用和ABS系统 相同的车轮转速 传感器
K为轮距、L为轴距
汽车定位导航系统
3、气流率陀螺仪
汽车定位导航系统
航迹推算
• Xn=X0+∑△Lsin0i • Yn=Y0+∑△Lcos0i
汽车定位导航系统
地图匹配
汽车定位导航系统
(二)GPS导航方法
• 美国73年开始经过20年时间、花费 200亿美元建成的定位系统。
先进的车载导航系统设计与开发
先进的车载导航系统设计与开发车载导航系统是指安装在汽车内部,能够为驾驶员提供导航、路况信息等功能的设备。
随着科技的不断进步,车载导航系统的设计与开发也越发先进。
本文将对先进的车载导航系统的设计与开发进行探讨。
一、导航系统设计首先,先进的车载导航系统的设计需要考虑用户体验。
为了满足用户的需求,导航系统应该具备直观的操作界面、多样化的导航方式以及准确的路线规划。
操作界面需要简洁明了,并且提供直观的地图显示和用户交互功能。
导航方式可以包括语音导航、实景导航等,以适应不同用户的使用习惯和需求。
而准确的路线规划则需要依赖先进的地图数据和算法,确保用户能够获得最佳的导航路线。
其次,车载导航系统的设计还需要考虑安全性。
在驾驶过程中,不安全的操作或干扰会导致事故发生。
因此,导航系统应该有安全驾驶提示功能,如提醒驾驶员注意前方路况、道路交通信息等。
此外,为了避免分散驾驶员的注意力,导航系统的操作应该简单方便,可以借助声控功能来减少对驾驶员的干扰。
二、导航系统开发车载导航系统的开发需要借助现代化的技术手段。
首先,地图数据是导航系统开发的基础。
高精度的地图数据可以提供准确的地理信息,为导航系统的功能提供支持。
地图数据的获取可以通过高清卫星图像、地理信息系统等方式进行,保证地图的准确性和更新性。
其次,导航系统的开发还需要依赖先进的算法。
路线规划、路径优化、实时交通信息等功能都需要借助高效的算法来实现。
例如,路径规划可以利用最短路径算法、遗传算法等来获得最佳路径。
实时交通信息则可以通过实时数据采集和分析,利用机器学习等方法来预测交通状况,并提供准确的路线规划。
另外,导航系统的开发还需要考虑与其他系统的集成。
如与车辆控制系统、语音识别系统等进行无缝集成,提供更加智能化的导航体验。
三、先进车载导航系统的应用前景随着人们对安全驾驶的重视程度的提高,先进的车载导航系统在未来将有着广阔的应用前景。
首先,车载导航系统有助于提高驾驶员的驾驶安全性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
车载导航系统构架及应用分析车载导航系统构架及应用分析在车载系统中,除了行车操控息息相关的车体、传动及安全系统开始导入更多电子功能外,最充分利用电子技术的应用当是资通娱乐系统。
这个结合资讯、通讯和娱乐的车载应用系统,正是电子技术进展最快速的三大领域,当它们被转移到汽车的市场时,也发展出独到的应用型式与技术。
在这个领域出现的新名词为Telematics,它是是通讯和资讯的合成字,顾名思义,它意指整合通讯与资讯的新兴车载应用。
在产品定位上,可以分为可携式设备(PortableDevice)和车装式设备(In-vehicle)两种,这两类设备又可依是否具备对外的通讯功能,再将Telematics的市场区隔分为四大块。
GPS导航定位在Telematics中具有关键性的地位,车载GPS系统除了可为驾驶提供导航资讯外,当它与无线通讯技术(如GPRS/3G)结合时,它能提供定位资讯给Telematics的服务供应商,如裕隆的TOBE、北美GM的OnStar,以及日系的Toyota、Honda、Nissan车厂。
当他们的服务中心收到个别车子的位置资讯后,就能够为车主提供道路救援、失车找回等服务。
当然,计程车或公车、游览车也可运用GPS来发挥车队追踪及控管的功能。
另一个与GPS息息相关的应用则与紧急救难有关。
在美国有一项e911的计画,它要求手机中必须建置定位功能,以做为紧急状况通报之用;e911属于个人性的紧急救难策略,相较之下,欧盟则提出汽车驾驶紧急救难相关的eCall 计画,预定在2009年9月以后,欧盟全部的新车都要具有eCall的配备,此配备将结合碰撞侦测、GPS和行动通讯三大功能,在第一时间自动向泛欧统一的紧急电话号码112进行通报,除了车辆地理位置之外,eCall还设定可传送数据资料,以语音和资讯双重管道让112接线人员来判定合适的救援方式。
GPS在车载系统中已逐渐成为必备装置,而且不断发展出加值功能。
本文将介绍车载GPS的系统设计架构、要领、天线设计及其他前瞻性的技术发展趋势。
GPS系统架构剖析在用户端的GPS装置是一单向的GPS讯号接收机,它会接收来自天空中导航卫星的定位讯号,这二十多颗卫星会传送L1及L2两种讯号,使用的频率分别为1575.42MHz及1227.60MHz,一般民用的GPS接收机只需接收L1于1575.42MHz的频率。
GPS定位系统是利用卫星基本三角定位原理,由GPS接受装置先找到三颗以上在天顶上的卫星所在位置,再计算每颗卫星与接收器之间的距离,就能得出接收器在三维空间中的座标值。
再进一步来看GPS接收器的系统运作流程。
GPS卫星讯号会先由GPS天线来接收,再经由RF射频前端将高频讯号转为中、低频数位讯号,再传送到GPS基频元件,此元件的核心技术在于相关器(correlator)的设计,也就是透过相关器来比对找出正确的卫星编号,进而比照取得多颗卫星的万年历(Almanac)和广播星历(BroadcastEphemeris)等资料。
愈多通道的相关器意味着能更快速找到卫星的位置,目前一般GPS接收器都至少提供12个通道的相关器,更高阶的接收器则具有16个,甚至是32个通道的相关器。
GPS接收器的控制功能是由微处理器或微控制器来实现,此一处理核心可以来自外部,也能嵌入在GPS基频元件当中。
目前较初阶的GPS接收器产品常用ARM7做为核心,高阶的机种则会升级到ARM9核心。
此外,这类元件也会具备微处理器支援功能,例如UART和即时时钟(RTC)。
星历资料会以NMEA0183或RTCM等格式输出到主处理器,进一步与GIS地图引擎整合以显示所在街道位置,或透过无线通讯介面传出位置资讯,让远端的伺服器能提供进一步的位置相关服务。
NMEA0183是GPS惯用的一种标准通讯协定,它採用简化ASCII的序列通讯协定来定义数据传送的格式。
当GPS採用差分定位(DGPS)的辅助定位模式,如美国的WAAS或欧洲的EGNOS系统时,则需输出RTCM或NTRIP1.0的协定格式。
此外,由于不同的接收机所提供的原始资料格式通常会不同,当有需要针对不同型号接收机收集的资料进行统一处理,就必须建立GPS通用资料交换格式,目前业界普遍採用的格式为RINEX。
GPS硬体架构选择要领综上所述,一部车载GPS的硬体系统架构中,主要的单元包括天线、RF前端、基频/相关器、处理器核心,此外,还包括记忆体、匯流排介面。
这些单元可以採离散式(discrete)的作法来提高设计上的弹性,也能採整合式的策略,将多个单元整合为一颗系统单晶片(SoC)、单封装(SiP)或模组,以降低设计的难度及成本。
当系统工程师在进行设计时,必须在效能、成本与弹性三大评量要件中进行选择。
以效能来透过备用电池的使用,能将电源电压降低,这也有助于节省功耗。
从高频转低频的过程,是杂讯产生的主要环节,在此过程中必须妥善抑制杂讯的产生,例如将SAMPCLK的讯号谐波降到最小,以免混杂在中频(IF)链路当中,这可透过在射频前端与相关器之间配置适当的电阻器来达成抑制的目标。
此外,各单元在电路上的佈局和佈线,也会影响干扰的状况,因此需要进行妥善的规划。
GPS天线的需求特性GPS天线也是决定GPS效能表现的关键。
GPS卫星讯号的背景噪讯为-136dBW,为避免干扰,国际电信法规规定卫星传送之讯号不得大于-154dBW,因此GPS的讯号实际上相当的弱,因此接收天线的灵敏度必须相当的高,这和天线的大小及形状密切相关。
可用于GPS的天线种类包括片状天线(Patch)、螺旋式天线(Helix/Spiral)和平面倒F型天线(PIFA)等,其中又以Patch及Helix使用最多,请参考(图四)。
由于GPS的讯号属于圆极化波,所以GPS接收天线也必须採圆极化的工作方式。
平板天线的好处是其耐用性及相对容易制作,成本也较便宜。
不过它具有明显的方向性,平板要面向天空才能得到较好的接收效果。
这种方向性会带来使用上极大的限制;此外,它虽然能顺利接收到正上方的卫星讯号,但若没有撷取到低角度的卫星资讯,误差也会相对较高,精确度则会下降。
较先进的作法是採四臂螺旋天线(QuadrifilarHelixAntenna),它拥有全面向360度的接收能力,使天线在任何方向都有3dB的增益。
这让GPS接收器能以各种角度摆放,而且能接收到很低角度的卫星讯号。
此外,更佳的作法再导入Balun的电路设计,如此一来就能有效隔离天线周围的噪讯,能容许各种功能的天线并存于极小的空间中而不会互相干扰,很适合手持设备的天线设计。
不过,此类天线的成本仍然偏高。
前瞻性技术一:DR在车载的导航使用中,常会因为遭遇到环境上的遮蔽因素而造成导航工作无法正常运作。
在高楼林立的巷道中收讯状况往往极差,当行进隧道中时,那更是完全没有讯号可用。
在这个时候,就可以透过方位推估(DeadReckoning,DR)技术来做为暂时的导航工具。
DR的技术原理是透过能感测或量测距离及方向改变的装置,来估算出车子移动位置的改变。
在正向的行进距离通常採用里程计(Odometer)或加速度计(Accelerometer)来进行量测;转动角度则使用磁罗盘(Compass)、陀螺仪(Gyrometer)或差分里程计(DifferentialOdometer)来量测;高度上的变化则需使用气压计(Barometer)。
请参考(图四)的整合设计实例图。
里程计是每台车子中皆有的装置,GPS接收器可透过CANBus来连结里程计以进行量测,但里程计的缺点是会因使用时间而降低其准确性。
较先进的作法是採用MEMS技术的加速度计和陀螺仪,它们的体积小,也容易进行系统整合,不过,一分钱一分货,精确度高的MEMS 元件也需要较高的成本。
此外,在实用上,要提升DR系统的精确性,还得时常进行线上感测器的校准,这时就得靠GPS的定位讯号来修正DR 感测器的参数项目。
在短时间内,DR的正确性相当高,甚至可以高于GPS,但当使用时间久了,DR的误差累积效应会愈来愈大,导航的精确度就会大幅下降,这时必须回归到GPS系统来找出绝对的位置,才能再次使用DR。
DR和GPS可说是相辅相成的车载导航系统,但目前商品化的产品仍然不多,主要的瓶颈在于DR感测器的准确度、成本,以及与导航系统整合的演算法开发上。
前瞻性技术二:Galileo大家所熟知的GPS,其实是由美国军方所佈建的全球卫星导航系统。
目前有另一套相似的系统正在筹建中,也就是欧盟主导的Galileo计画。
Galileo的技术部分是由欧洲太空总署(ESA)所主导,但它的营运单位是属于民营组织。
第一颗卫星(GIOVE-A)已于2005年底成功发射升空,预计2008年将正式开放商业使用。
Galileo 准备发射30颗卫星到天空,让任何地点都能看到4颗以上的卫星;不过Galileo的卫星轨道与赤道面的倾角较大(56度),因此对北欧等高纬度地区能提供更完善的服务。
由于这是属于民营的组织,因此获利是很大的考量,这也是为何Galileo规划了三个不同的频率,包括LowerL-band的E5a和E5b,MiddleL-band的E6和UpperL-band的E2-L1-E1,以提供差异化的收费服务。
它提供四种服务等级,即开放性服务(OS)、生命安全服务(SoL)、商业服务(CS)和公用法规服务(PRS),其中SoL和CS是要付费的,免费的民用工作频率在1560–1591MHz,可与GPS的1575.42MHz使用相同的天线进行接收。
Galileo採用特殊的调变技术,能减少多重路径的干扰,因此能提升商用上的精确度,在水平方向的精确度可达4公尺,垂直方向则为8公尺。
它与GPS及GNSS等系统具有互操作性,一个整合GPS和Galileo两大系统的双工模式接收机,其精确度还能够再提升,水平方向可达3–4公尺,垂直方向可达6-8公尺。
项目GPS系统Galileo系统卫星数24+330(27+3)轨道面个数63轨道高度20200公里23616公里运行週期11小时58分14小时04分轨道倾角55度56度载波频率L1:1575.42MHzL2:1227.60MHzL5:1176.45MHzE2-L1-E1:1560–1595MHzE5:1164–1214MHzE6:1260–1300MHz传输方式CDMACDMA调制码C/A码、P码和M码代码1-10时间系统UTCUTC坐标系统WGS-84GTRF(ITRF)结论车载GPS导航系统虽然已有长足的进步,但面对新兴的整合性技术及应用,未来的发展挑战仍然不小。
尤其是当GPS不再只是独立(Standalone)的装置,而需要与行动网路(GPRS/3G)或网路相连时,它就必须是能提供多重模式(Multi-mode)的互动系统。