机电工程控制基础--01绪论
机械工程控制基础绪论

机械工程控制基础绪论引言机械工程控制是机械工程领域中的一个重要分支,它涉及到机械设备、自动控制技术和电子技术等多个学科的知识。
控制是实现机械设备运转稳定、高效工作的关键因素之一。
机械工程控制基础是学习和掌握机械工程控制的前提和基础,本文将介绍机械工程控制基础的概念、重要性以及其在机械工程中的应用。
机械工程控制基础的概念机械工程控制基础是指机械工程控制相关的基本原理、基本知识和基本技术。
它包括传感器、执行器、控制器和信号处理等方面的内容。
传感器是机械工程控制的输入设备,它能够将机械设备的运行状态和环境条件转化为电信号,以供控制器进行分析和判断。
执行器是机械工程控制的输出设备,它能够根据控制器的指令,控制机械设备的运动或状态。
控制器是机械工程控制中的核心部分,它根据传感器提供的信息,通过算法和逻辑运算,生成相应的控制信号,从而控制机械设备的运行。
信号处理则是指对传感器采集到的信号进行处理和优化的过程,以提高控制系统的性能和稳定性。
机械工程控制基础的重要性机械工程控制基础的学习和掌握对于机械工程师来说非常重要。
首先,机械工程控制基础是学习和研究机械工程的基石,它为后续的高级控制理论和应用提供了坚实的基础。
其次,机械工程控制基础是掌握现代先进工业制造技术和高精度装备的必备技能。
如今,自动化和智能化已经成为工业制造的发展趋势,机械工程师需要具备相关的控制基础知识,才能进行机械设备的自动控制和智能化改造。
此外,机械工程控制基础还是机械工程师与电子工程师和自动控制工程师合作的桥梁,只有掌握了机械工程控制基础,机械工程师才能更好地与其他领域的专家进行沟通和合作,共同完成复杂的工程项目。
机械工程控制基础在机械工程中的应用机械工程控制基础在机械工程中有着广泛的应用。
首先,机械工程控制基础在机械设备的控制系统中起到了关键作用。
通过传感器获取机械设备的各种参数,通过控制器生成相应的控制信号,可以实现对机械设备的运动、位置和力等参数的精确控制。
机电系统及其控制-绪论.

传感器
放大、 滤波
控制器
A/D 执行器
D/A, 放大
传动元件
驱动元件
研究内容 1.5.1 共性关键技术
3、自动控制技术 选择何种控制方法和控制器,选择何种开发语 言,如何编写出满足性能要求的控制程序。
4、伺服驱动技术
选择何种驱动元件,如何搭建驱动电路,确 定驱动元件参数。
5、机械传动技术 如何将驱动系统输出的动力转化为末端执行器 期望的运动形式,并满足负载、精度、运动范 围等指标要求。
机电系统及其控制
授课教师:赵建文 所在单位:哈尔滨工业大学(威海)
船舶与海洋工程学院 机械工程系
绪论
什么是机电系统?(定义) 哪些系统属于机电系统?(分类) 机电系统包括哪些部分?(构成) 所有机电系统都包括这些部分吗?(剖析) 研究哪些内容?(关键技术、设计方法) 怎样展开设计?(设计流程)
§1-1 机电系统的定义
夹持力检测:压力传感器或 电流传感器
护理助残机器人
视觉 MANUS手臂
§1-4 各部分的功能-典型系统剖析
温度检测
密封检测 衣量检测 水量检测
控制系统:
单 片 机
驱动:压缩机 执行机构: 蒸发器
§1-5 课程研究内容
机电一体化共性关键技术 典型部件工作原理及选取方法 机电系统设计方法 机电系统的常用控制方法
研究内容 1.5.2 系统设计方法
机电互补:某些功能(轨迹跟踪、自锁、间歇、运动触 发),用机械和电控均可以实现,应发挥各自特长,选 择合理方式。 一体化设计:驱动传动一体化(如直线电机);机构电 路一体化,封装成标准单元,通过一个借口实现电源供 给及信号传输。 模块化设计、可重构设计。 机械设计与电路设计相辅相成,机械设计时应充分考虑 到电路板的安装,有时甚至可以用电路板作为机械支撑。
机电系统绪论

1.5.1 共性关键技术
如何搭建驱动电路,如何将驱动信号按照一应的时序和逻辑要求送给驱动元件。
4、伺服驱动技术
如何将驱动系统输出的动力转化为末端执行器期望的运动形式,并满足负载、精度、运动范围等指标。
5、机械传动技术
研究内容 选择何种控制方法和控制器,选择何种开发语言,如何编写出满足性能要求的控制程序。
系统(产品)的价值
高
低
主功能
系统误差
小
大
抗干扰能力
强
弱
废弃物输出
少
多
工作效率
高
低
动力功能
功耗
低
高
能源供给
内装
外设
控制功能
输入输出 接口数量
多
少
手动操作
少
多
构造功能
尺寸/重量
小/轻
大/重
强度
高
低
1.6 设计流程
系统功能评价
设计实例
1.7 设计实例
全自动化学发光免疫分析仪
设计实例
化学发光免疫检测原理
4、传动系统、机械本体
04
提供能量,转换成需要的形式,实现动力供给。
3、驱动系统
03
3机电系统构成
§1-4 机电系统各部分的功能
操作器,接收控制信息,完成要求的动作,实现主功能。
5、执行机构
1-4 典型机电系统的解剖
龙门式高速加工中心 数控铣床
电机
机械 部件
位置,速度检测单元
位置,速度反馈
CNC
05
怎样展开设计?(设计流程)
06
机电一体化
信息科学
机械学
电子学
为使机械系统更好的完成预期功能,在系统中引入微电子技术,并用软件将二者有机结合起来的系统。概括:以机为主,电为机用。
(完整word版)《机械工程控制基础》教案
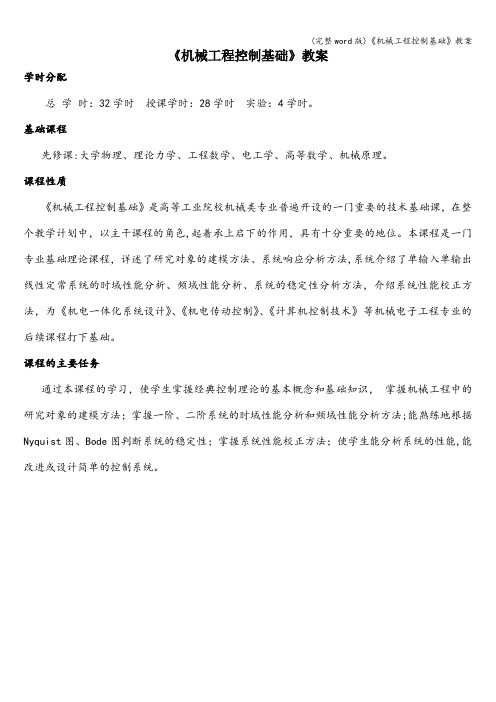
《机械工程控制基础》教案学时分配总学时:32学时授课学时:28学时实验:4学时。
基础课程先修课:大学物理、理论力学、工程数学、电工学、高等数学、机械原理。
课程性质《机械工程控制基础》是高等工业院校机械类专业普遍开设的一门重要的技术基础课,在整个教学计划中,以主干课程的角色,起着承上启下的作用,具有十分重要的地位。
本课程是一门专业基础理论课程,详述了研究对象的建模方法、系统响应分析方法,系统介绍了单输入单输出线性定常系统的时域性能分析、频域性能分析、系统的稳定性分析方法,介绍系统性能校正方法,为《机电一体化系统设计》、《机电传动控制》、《计算机控制技术》等机械电子工程专业的后续课程打下基础。
课程的主要任务通过本课程的学习,使学生掌握经典控制理论的基本概念和基础知识,掌握机械工程中的研究对象的建模方法;掌握一阶、二阶系统的时域性能分析和频域性能分析方法;能熟练地根据Nyquist图、Bode图判断系统的稳定性;掌握系统性能校正方法;使学生能分析系统的性能,能改进或设计简单的控制系统。
第一次课第1章绪论1.1机械控制基础的研究对象、课程的基本任务、控制系统的基本要求一、机械控制基础的研究对象 : 系统、输入、输出1、自动控制系统基本组成系统输出指控制系统所要控制的物理量,表征对象或过程的状态的特性。
2、典型闭环控制系统的框图的构成输入信号输出量给定值偏差控制器执行机构被控对象-测量变送器给定环节:给出与系统输出量希望值相对应的系统输入量。
测量环节:测量系统输出量的实际值,并把输出量的量纲转化成与输入量相同。
比较环节:比较系统的输入量和主反馈信号,并给出两者之间的偏差。
放大环节:对微弱的偏差信号进行放大和变换,使之具有足够的幅值和功率,以适应执行元件动作的要求。
执行环节:根据放大后的偏差信号产生控制、动作,操作系统的输出量,使之按照输入量的变化规律而变化。
二、课程的基本任务研究系统、输入、输出之间的动态关系三、控制系统的基本要求:稳、快、准1.2 控制理论的研究内容、发展、应用、学习方法。
第一章机电传动控制基础知识

机电信息工程学院 机电系 杨静萍 2012-2013(2)
内容提要
• 电器的分类与作用 • 常用低压电器 • 电动机
2019/9/21
绪论
电器的分类与作用
交流1200V以上、 直流1500V以上。
高压电器
一种能控制电路的设备
电器
用于交流1200V、直流1500V及 以下的电路中起通断、保护、控
低压电器
制或调节作用的电器产品。
其 它 电
器
行 程 开
关
熔 断 器
开 关 电
器
继
接
电
触
器
器
指 示 灯
…
按 钮
微 动 式
滚 动 式
直 动 式
刀 开 关
组 合 开
关
自 动 开
关
熔 断 器
速 度 继 电
器
时 间 继 电
器
电交 热 磁流 继 式接 电 继触 器 电器
器
直 流 接 触
器
快 速 式
螺 旋 塞
式
管 式
2019/9/21
基础知识
异步电动机
• 用途
• 三相笼型异步电动机具有结构简单、维修方 便、运行可靠等特点,与同容量其他电动机 相比,重量轻、成本低、价格便宜,因此应 用非常广泛。
2019/9/21
基础知识
定子:产生旋转磁场
• 定子铁芯:安放定子绕组 • 机座:固定与支撑定子铁芯 • 定子绕组:Y形或△形
2019/9/21
基础知识
异步电动机
• 结构
• 定子 • 转子
2019/9/21
基础知识
三相异步电动机
机电传动控制绪论
JZ
JM
J1 j12
JL jL2
GDZ2 GDM 2 GjD 1212 GjD L2L2
JM、J1、JL—电机轴、中间轴、生产 机械轴的转动惯量; GDM2、GD12、GDL2—电机轴、中 间轴、生产机械轴的飞轮转矩; j1=ωM/ω1 —电机轴与中间轴速比; jL=ωM/ωL —电机轴与生产机械轴速比。
构等
n
特点 转矩TL具有
固定的方向
不随转速方
TL
向变而改变 如起重类型
负载的重物
绪论
2)恒功率负载特性
3)泵与风机类负载特性
恒功率负载特点是:负载转
负载的转矩T L基本上与转
矩与转速的乘积为一常数,即T L与 速 n的平方成正比。负载特性
成反n比,特性曲线为一条双曲线。 为一条抛物线。
n
n
理想的通 风机特性
直线运动匀速时
F=FZ v a F=ma P=Fv E=mv2/2
对 照
旋转运动匀速时 T=TZ ω ε T=Jε P=Tω E=Jω2/2
记 忆
绪论
运动方程的实用形式:
TemTL
GD2 375
dห้องสมุดไป่ตู้ dt
系统旋转运动的三种状态
1)当Tem 或TL 时dn ,系 0统处于静止或恒转速运行状态,即处于稳态。 dt
应保证干扰消除后,系统能恢复原速。
绪论
控制设备
电动机
传动机构
生产负载
机电传动的目的,是将电能转变为机械能,实现生产机械 的启动、停止以及速度调节,完成各种生产工艺过程的要求, 保证生产过程的正常进行。
绪论
第一章 机电传动控制基础知识优秀课件
2021/4/17
基础知识
同步电动机
• 同步电动机的工作原理
• 同步电动机接电源起动时,起动转短为零,因此, 必须采用某种方法(异步起动法 )起动同步电动 机。当电动机的转速接近同步转速时,将直流励磁 电源通入转子,使转子励磁。这时,旋转磁场就能 紧紧地牵着转子一起转动。以后,两者转速保持相 等,即同步。
异步电动机
单相异步电动机 三相异步电动机
2021/4/17
基础知识
三相笼型异 步电动机
三相绕线型 异步电动机
直流电动机
• 直流电动机的构造
• 定子 • 转子
2021/4/17
基础知识
直流电动机
• 工作原理:左手定律
换向器
2021/4/17
基础知识
直流电动机
• 用途
• 一般用在低电压要求的电路中,直流电源可 以方便携带如电动自行车就是用直流电动机, 又如电脑风扇、收录机电机等都是。
第一章 机电传动控制基础知识
内容提要
• 电器的分类与作用 • 常用低压电器 • 电动机
2021/4/17
绪论
电器的分类与作用
交流1200V以上、 直流1500V以上。
高压电器
一种能控制电路的设备
电器
用于交流1200V、直流1500V及 以下的电路中起通断、保护、控
低压电器
制或调节作用的电器产品。
其 它 电
器
行 程 开
关
熔 断 器
开 关 电
器
继
接
电
触
器
器
指 示 灯
绪论 第01章 磁路
A
Ni Hl B l l A
F Rm
图1-2安培环路定律
(4)磁链与电磁感应定律
磁链
• 处于磁场中的一个N匝线圈,若其各匝通过的磁通都相同, 则经过该线圈的磁链为
N
当线圈中的磁链发生变化时,线圈中将产生电动势, 称为感应电动势。
电磁感应定律 • 若电动势、电流和磁通的正方向如图1-3所示,即电流
二、电机的基本构成和分类
电机是基于电磁感应定律实现能量转换的装置。
• 有一个闭合磁路产生磁场,磁场与两个或两个以上的电路耦 合。
• 电机中的能量转换,通过有关电路中磁链的变化来实现的。
电机的构成:
常见的电机是旋转电机,它产生旋转运动, • 静止部分(称为定子) • 旋转部分(称为转子) • 二者之间有一空气隙。
电机学
课程性质:
电气工程及其自动化专业核心课
(课时:理论64 )
考核方式:
期末闭卷
——平时30%,期中20%,期末50%
本课主要内容
电机学基本知识;变压器、直 流电机、异步电机、同步电机、控 制电机结构原理;
教材:普通高等教育“十一五”规划教材
电机学 作者:汤蕴璆 出版社:机械工业出版社
参考书:
Rm
HL BA
L
A
若磁路中有n个磁阻Rm1、Rm2、…、Rmn串联,则等效磁阻为
Req Rm1 Rm2 ... Rmn
若磁路中有n个磁阻Rm1、Rm2、…、Rmn并联,则等效磁阻为
Req
1 Rm1
1 1 ... Rm2
1 Rmn
磁阻的倒数称为磁导,用表示
其单位为Wb/A。
A
L
磁路与电路的类比
主讲教师:付东辉
机电控制技术:第一章 概述
一个简单的例子:
数控机床主轴≠传统机床主轴+调速电机 内装式电动机直接驱动,主轴电动机与机床 主轴“合二为一”, 电调速取代了齿轮传动,主传动链缩短,等 效的转动惯量大大下降。 用于自动控制,响应速度提高; 对数控机床,机械设备的设计,带来了极大 的改变。 产生了许多“电主轴单元”生产企业 Electric Spindle,Motor Spindle
课程介绍
• 机电控制的目的和任务 • 机电控制及其控制系统的发展
概况 • 本课程在专业教学中的地位 • 课程的内容安排
机电控制的目的和任务
机床电气控制 电机电器 机电传动 运动控制 电力拖动
DDC 电力电子学 机器人控制 数控技术 伺服控制
Байду номын сангаас
• 机电控制技术所解决的问题
–能量转换(电能——机械能)energy transform –运动(位置、轨迹、速度、加速度 )控制和调节(稳定
机电控制技术
mechatronics control techniques control technologies
电器 electrical appliance 电气 electric
Mach-Electronic
Control Technique
Mechatronics机电学,机电一体化, 是1980年代初,日本名古屋大学提出,并 最早设置了机电一体化专业,现称“机械 电子工程;
3 直流电机调速基本电路 电力电子(Power Electronics)元件的基础知识 (原理与应用);
4 交流调速的原理和应用(introduction only); 5 步进电机(step motor)控制。
第1章 机电控制技术基本概念
1.2机电控制系统结构及相关技术
1.2.2 机电控制相关技术
1.机械技术
2.传感检测技术 3.信息处理技术 4.自动控制技术 5.伺服传动技术 6.系统技术
《机电控制技术》主编 朱照红 第1章 绪论
1.3
机电控制技术的现状与发展前景
1.主要经历的四个阶段:
断续控制阶段 连续控制阶段 计算机数字控制阶段 计算机集成制造阶段
2.机电控制技术的发展方向大致是:
性能上向高精度、高效率、高性能、智能化方向发展; 功能上向小型化、轻型化、多功能化方向发展; 结构上向系统化、集成化方向发展。
《机电控制技术》主编 朱照红 第1章 绪论
《机电控制技术》主编 朱照红 第1章 绪论
1.1
机电控制技术基本概念
1.定义
机电控制技术是在现代工业的基础上,综合运用机械技术、微电子 技术、自动控制技术、信息技术、传感检测技术、电力电子技术、 接口及软件编程技术等群体技术,完成系统的信息处理、接口耦合、 动力传递、物质位移、能量转换等功能。
2.特点
高职高专规划教材
第1章 绪论
1.1机电控制技术基本概念 1.2机电控制系统结构及相关技术 1.3机电控制技术的现状与发展前景
※本章重点与难点
《机电控制技术》主编 朱照红 第1章 绪论
第1章
绪论重点和难点
本章重点:
1.机电控制技术基本概念 2.理解机电控制技术的特点
本章难点:
1.机电控制系统组成及其作用
机电控制技术具有“机”“电”结合,“监”“控”并重,以“柔” 克“刚”,“人”“机”交互等的鲜明特点。
《机电控制技术》主编 朱照红 第1章 绪论