The evaluation of adaptable multimodal system outputs
数值分析英文课件

or relative forward error of about 1 percent. Since 1.96 = 1.4 , the absolute backward error is
ˆ ∆x = x − x = 1.96 − 2 = 0.04
Computational error = Truncation error + rounding error
• Propagated (传播) vs. computational error 传播)
– x = exact value, – f = exact function,
ˆ x = approx. value ˆ f = its approximation
Backward vs. forward errors
Suppose we want to compute y = f ( x ) , where f : ℜ → ℜ ˆ but obtain approximate value y
Forward Error:
ˆ ˆ ∆y = y − y = f ( x ) − f ( x )
Example of Ill-Posed Problem
x 1 x 1 x 11 1 + 2 + 3 = 2 3 6 1 1 1 13 x1 + x2 + x3 = 3 4 12 2 1 x1 + 1 x2 + 1 x3 = 47 3 4 5 60
2 significant digits rounding
• Problems that are not well-posed are ill-posed.
Firefly_Algorithms_for_Multimodal_Optimization1

a r X i v :1003.1466v 1 [m a t h .O C ] 7 M a r 2010Firefly Algorithms for Multimodal Optimization Xin-She Yang Department of Engineering,University of Cambridge,Trumpington Street,Cambridge CB21PZ,UK Abstract Nature-inspired algorithms are among the most powerful algorithms for op-timization.This paper intends to provide a detailed description of a new Firefly Algorithm (FA)for multimodal optimization applications.We will compare the proposed firefly algorithm with other metaheuristic algorithms such as particle swarm optimization (PSO).Simulations and results indicate that the proposed firefly algorithm is superior to existing metaheuristic algorithms.Finally we will discuss its applications and implications for further research.Citation detail:X.-S.Yang,“Firefly algorithms for multimodal optimiza-tion”,in:Stochastic Algorithms:Foundations and Applications ,SAGA 2009,Lecture Notes in Computer Sciences,Vol.5792,pp.169-178(2009).1Introduction Biologically inspired algorithms are becoming powerful in modern numerical optimization [1,2,4,6,9,10],especially for the NP-hard problems such as the travelling salesman problem.Among these biology-derived algorithms,the multi-agent metaheuristic algorithms such as particle swarm optimization form hot research topics in the start-of-the-art algorithm development in optimiza-tion and other applications [1,2,9].Particle swarm optimization (PSO)was developed by Kennedy and Eber-hart in 1995[5],based on the swarm behaviour such as fish and bird schooling in nature,the so-called swarm intelligence.Though particle swarm optimization has many similarities with genetic algorithms,but it is much simpler because it does not use mutation/crossover operators.Instead,it uses the real-number randomness and the global communication among the swarming particles.In this sense,it is also easier to implement as it uses mainly real numbers.This paper aims to introduce the new Firefly Algorithm and to provide the comparison study of the FA with PSO and other relevant algorithms.We will first outline the particle swarm optimization,then formulate the firefly algorithms and finally give the comparison about the performance of these algorithms.The FA optimization seems more promising than particle swarm optimization in the sense that FA can deal with multimodal functions morenaturally and efficiently.In addition,particle swarm optimization is just a special class of thefirefly algorithms as we will demonstrate this in this paper. 2Particle Swarm Optimization2.1Standard PSOThe PSO algorithm searches the space of the objective functions by adjusting the trajectories of individual agents,called particles,as the piecewise paths formed by positional vectors in a quasi-stochastic manner[5,6].There are now as many as about20different variants of PSO.Here we only describe the simplest and yet popular standard PSO.The particle movement has two major components:a stochastic component and a deterministic component.A particle is attracted toward the position of the current global best g∗and its own best location x∗i in history,while at the same time it has a tendency to move randomly.When a particlefinds a location that is better than any previously found locations,then it updates it as the new current best for particle i.There is a current global best for all n particles.The aim is tofind the global best among all the current best solutions until the objective no longer improves or after a certain number of iterations.For the particle movement,we use x∗i to denote the current best for particle i,and g∗≈min or max{f(x i)}(i=1,2,...,n)to denote the current global best. Let x i and v i be the position vector and velocity for particle i,respectively. The new velocity vector is determined by the following formulav t+1i=v t i+αǫ1⊙(g∗−x t i)+βǫ2⊙(x∗i−x t i).(1) whereǫ1andǫ2are two random vectors,and each entry taking the values between0and1.The Hadamard product of two matrices u⊙v is defined as the entrywise product,that is[u⊙v]ij=u ij v ij.The parametersαandβare the learning parameters or acceleration constants,which can typically be takenas,say,α≈β≈2.The initial values of x t=0i can be taken as the bounds orlimits a=min(x j),b=max(x j)and v t=0i =0.The new position can then beupdated byx t+1 i =x t i+v t+1i.(2)Although v i can be any values,it is usually bounded in some range[0,v max].There are many variants which extend the standard PSO algorithm,and the most noticeable improvement is probably to use inertia functionθ(t)so that v t i is replaced byθ(t)v t i whereθtakes the values between0and1.In the simplest case,the inertia function can be taken as a constant,typicallyθ≈0.5∼0.9. This is equivalent to introducing a virtual mass to stabilize the motion of the particles,and thus the algorithm is expected to converge more quickly.3Firefly Algorithm3.1Behaviour of FirefliesTheflashing light offireflies is an amazing sight in the summer sky in the tropical and temperate regions.There are about two thousandfirefly species, and mostfireflies produce short and rhythmicflashes.The pattern offlashes is often unique for a particular species.Theflashing light is produced by a process of bioluminescence,and the true functions of such signaling systems are still debating.However,two fundamental functions of suchflashes are to attract mating partners(communication),and to attract potential prey.In addition,flashing may also serve as a protective warning mechanism.The rhythmicflash, the rate offlashing and the amount of time form part of the signal system that brings both sexes together.Females respond to a male’s unique pattern of flashing in the same species,while in some species such as photuris,female fireflies can mimic the matingflashing pattern of other species so as to lure and eat the malefireflies who may mistake theflashes as a potential suitable mate.We know that the light intensity at a particular distance r from the light source obeys the inverse square law.That is to say,the light intensity I de-creases as the distance r increases in terms of I∝1/r2.Furthermore,the air absorbs light which becomes weaker and weaker as the distance increases. These two combined factors make mostfireflies visible only to a limited dis-tance,usually several hundred meters at night,which is usually good enough forfireflies to communicate.Theflashing light can be formulated in such a way that it is associated with the objective function to be optimized,which makes it possible to formulate new optimization algorithms.In the rest of this paper,we willfirst outline the basic formulation of the Firefly Algorithm(FA)and then discuss the implementation as well as its analysis in detail.3.2Firefly AlgorithmNow we can idealize some of theflashing characteristics offireflies so as to developfirefly-inspired algorithms.For simplicity in describing our new Fireflire Algorithm(FA),we now use the following three idealized rules:1)allfireflies are unisex so that onefirefly will be attracted to otherfireflies regardless of their sex;2)Attractiveness is proportional to their brightness,thus for any twoflashingfireflies,the less brighter one will move towards the brighter one. The attractiveness is proportional to the brightness and they both decrease as their distance increases.If there is no brighter one than a particularfirefly, it will move randomly;3)The brightness of afirefly is affected or determined by the landscape of the objective function.For a maximization problem,the brightness can simply be proportional to the value of the objective function. Other forms of brightness can be defined in a similar way to thefitness function in genetic algorithms.Based on these three rules,the basic steps of thefirefly algorithm(FA)can be summarized as the pseudo code shown in Fig.1.Firefly AlgorithmFigure1:Pseudo code of thefirefly algorithm(FA).In certain sense,there is some conceptual similarity between thefirefly al-gorithms and the bacterial foraging algorithm(BFA)[3,7].In BFA,the at-traction among bacteria is based partly on theirfitness and partly on their distance,while in FA,the attractiveness is linked to their objective function and monotonic decay of the attractiveness with distance.However,the agents in FA have adjustable visibility and more versatile in attractiveness variations, which usually leads to higher mobility and thus the search space is explored more efficiently.3.3AttractivenessIn thefirefly algorithm,there are two important issues:the variation of light intensity and formulation of the attractiveness.For simplicity,we can always assume that the attractiveness of afirefly is determined by its brightness which in turn is associated with the encoded objective function.In the simplest case for maximum optimization problems,the brightness I of afirefly at a particular location x can be chosen as I(x)∝f(x).However, the attractivenessβis relative,it should be seen in the eyes of the beholder or judged by the otherfireflies.Thus,it will vary with the distance r ij between firefly i andfirefly j.In addition,light intensity decreases with the distance from its source,and light is also absorbed in the media,so we should allow the attractiveness to vary with the degree of absorption.In the simplest form, the light intensity I(r)varies according to the inverse square law I(r)=I s/r2 where I s is the intensity at the source.For a given medium with afixed light absorption coefficientγ,the light intensity I varies with the distance r.That is I=I0e−γr,where I0is the original light intensity.In order to avoid the singularity at r=0in the expression I s/r2,the combined effect of both theinverse square law and absorption can be approximated using the following Gaussian formI(r)=I0e−γr2.(3) Sometimes,we may need a function which decreases monotonically at a slower rate.In this case,we can use the following approximationI(r)=I02γ2r4+...,11+γr2.Equation(6)defines a characteristicdistanceΓ=1/√Γm.3.4Distance and MovementThe distance between any twofireflies i and j at x i and x j,respectively,is the Cartesian distancer ij=||x i−x j||=(x i−x j)2+(y i−y j)2.The movement of afirefly i is attracted to another more attractive(brighter)firefly j is determined byx i=x i+β0e−γr2ij(x j−x i)+α(rand−1where the second term is due to the attraction while the third term is random-ization withαbeing the randomization parameter.rand is a random number generator uniformly distributed in[0,1].For most cases in our implementation, we can takeβ0=1andα∈[0,1].Furthermore,the randomization term can easily be extended to a normal distribution N(0,1)or other distributions.In addition,if the scales vary significantly in different dimensions such as−105to 105in one dimension while,say,−0.001to0.01along the other,it is a good idea to replaceαbyαS k where the scaling parameters S k(k=1,...,d)in the d dimensions should be determined by the actual scales of the problem of interest.The parameterγnow characterizes the variation of the attractiveness,and its value is crucially important in determining the speed of the convergence and how the FA algorithm behaves.In theory,γ∈[0,∞),but in practice,γ=O(1) is determined by the characteristic lengthΓof the system to be optimized. Thus,in most applications,it typically varies from0.01to100.3.5Scaling and Asymptotic CasesIt is worth pointing out that the distance r defined above is not limited to the Euclidean distance.We can define many other forms of distance r in the n-dimensional hyperspace,depending on the type of problem of our interest. For example,for job scheduling problems,r can be defined as the time lag or time interval.For complicated networks such as the Internet and social networks,the distance r can be defined as the combination of the degree of local clustering and the average proximity of vertices.In fact,any measure that can effectively characterize the quantities of interest in the optimization problem can be used as the‘distance’r.The typical scaleΓshould be associated with the scale in the optimization problem of interest.IfΓis the typical scale for a given optimization problem,for a very large number offireflies n≫m where m is the number of local optima,then the initial locations of these n fireflies should distribute relatively uniformly over the entire search space in a similar manner as the initialization of quasi-Monte Carlo simulations.As the iterations proceed,thefireflies would converge into all the local optima (including the global ones)in a stochastic manner.By comparing the best solutions among all these optima,the global optima can easily be achieved. At the moment,we are trying to formally prove that thefirefly algorithm will approach global optima when n→∞and t≫1.In reality,it converges very quickly,typically with less than50to100generations,and this will be demonstrated using various standard test functions later in this paper.There are two important limiting cases whenγ→0andγ→∞.Forγ→0, the attractiveness is constantβ=β0andΓ→∞,this is equivalent to say that the light intensity does not decrease in an idealized sky.Thus,aflashing firefly can be seen anywhere in the domain.Thus,a single(usually global) optimum can easily be reached.This corresponds to a special case of particle swarm optimization(PSO)discussed earlier.Subsequently,the efficiency of this special case is the same as that of PSO.On the other hand,the limiting caseγ→∞leads toΓ→0andβ(r)→δ(r)(the Dirac delta function),which means that the attractiveness is almost zero in the sight of otherfireflies or thefireflies are short-sighted.This isFigure2:a global minimum f∗≈−1.801at(2.20319,1.57049).equivalent to the case where thefirefliesfly in a very foggy region randomly.No otherfireflies can be seen,and eachfirefly roams in a completely randomway.Therefore,this corresponds to the completely random search method.Asthefirefly algorithm is usually in somewhere between these two extremes,it ispossible to adjust the parameterγandαso that it can outperform both therandom search and PSO.In fact,FA canfind the global optima as well as all thelocal optima simultaneously in a very effective manner.This advantage will bedemonstrated in detail later in the implementation.A further advantage of FAis that differentfireflies will work almost independently,it is thus particularlysuitable for parallel implementation.It is even better than genetic algorithmsand PSO becausefireflies aggregate more closely around each optimum(withoutjumping around as in the case of genetic algorithms).The interactions betweendifferent subregions are minimal in parallel implementation.4Multimodal Optimization with MultipleOptima4.1ValidationIn order to demonstrate how thefirefly algorithm works,we have implemented itin Matlab.We will use various test functions to validate the new algorithm.Asan example,we now use the FA tofind the global optimum of the Michalewiczfunctionf(x)=−di=1sin(x i)[sin(ix2iFigure3:The initial40fireflies(left)and their locations after10iterations(right).scribed a multimodal function which looks like a standing-wave pattern[11] f(x)= e− d i=1(x i/a)2m−2e− d i=1x2i ·d i=1cos2x i,m=5,(11) is multimodal with many local peaks and valleys,and it has a unique globalminimum f∗=−1at(0,0,...,0)in the region−20≤x i≤20where i=1,2,...,dand a=15.The2D landscape of Yang’s function is shown in Fig.4.4.2Comparison of F A with PSO and GAVarious studies show that PSO algorithms can outperform genetic algorithms(GA)[4]and other conventional algorithms for solving many optimization prob-lems.This is partially due to that fact that the broadcasting ability of the cur-rent best estimates gives better and quicker convergence towards the optimality.A general framework for evaluating statistical performance of evolutionary al-gorithms has been discussed in detail by Shilane et al.[8].Now we will comparethe Firefly Algorithms with PSO,and genetic algorithms for various standardtest functions.For genetic algorithms,we have used the standard version withno elitism with a mutation probability of p m=0.05and a crossover probabilityof0.95.For the particle swarm optimization,we have also used the standardversion with the learning parametersα≈β≈2without the inertia correction[4,5,6].We have used various population sizes from n=15to200,and foundthat for most problems,it is sufficient to use n=15to50.Therefore,we haveused afixed population size of n=40in all our simulations for comparison.After implementing these algorithms using Matlab,we have carried out ex-tensive simulations and each algorithm has been run at least100times so as tocarry out meaningful statistical analysis.The algorithms stop when the varia-tions of function values are less than a given toleranceǫ≤10−5.The resultsare summarized in the following table(see Table1)where the global optimaare reached.The numbers are in the format:average number of evaluations(success rate),so3752±725(99%)means that the average number(mean)offunction evaluations is3752with a standard deviation of725.The success rateoffinding the global optima for this algorithm is99%.We can see that the FA is much more efficient infinding the global optima with higher success rates.Each function evaluation is virtually instantaneousFigure4:Yang’s function in2D with a global minimum f∗=−1at(0,0)where a=15.Table1:Comparison of algorithm performanceFunctions/Algorithms GA PSO FA on modern personal computer.For example,the computing time for10,000evaluations on a3GHz desktop is about5seconds.Even with graphics fordisplaying the locations of the particles andfireflies,it usually takes less thana few minutes.It is worth pointing out that more formal statistical hypothesistesting can be used to verify such significance.5ConclusionsIn this paper,we have formulated a newfirefly algorithm and analyzed its simi-larities and differences with particle swarm optimization.We then implementedand compared these algorithms.Our simulation results forfinding the globaloptima of various test functions suggest that particle swarm often outperformstraditional algorithms such as genetic algorithms,while the newfirefly algo-rithm is superior to both PSO and GA in terms of both efficiency and successrate.This implies that FA is potentially more powerful in solving NP-hardproblems which will be investigated further in future studies.The basicfirefly algorithm is very efficient,but we can see that the solutionsare still changing as the optima are approaching.It is possible to improve the solution quality by reducing the randomness gradually.A further improvement on the convergence of the algorithm is to vary the randomization parameterαso that it decreases gradually as the optima are approaching.These could form important topics for further research.Furthermore,as a relatively straightfor-ward extension,the Firefly Algorithm can be modified to solve multiobjective optimization problems.In addition,the application offirefly algorithms in com-bination with other algorithms may form an exciting area for further research. References[1]Bonabeau E.,Dorigo M.,Theraulaz G.,Swarm Intelligence:From Naturalto Artificial Systems.Oxford University Press,(1999)[2]Deb.K.,Optimisation for Engineering Design,Prentice-Hall,New Delhi,(1995).[3]Gazi K.,and Passino K.M.,Stability analysis of social foraging swarms,IEEE Trans.Sys.Man.Cyber.Part B-Cybernetics,34,539-557(2004).[4]Goldberg D.E.,Genetic Algorithms in Search,Optimisation and MachineLearning,Reading,Mass.:Addison Wesley(1989).[5]Kennedy J.and Eberhart R.C.:Particle swarm optimization.Proc.ofIEEE International Conference on Neural Networks,Piscataway,NJ.pp.1942-1948(1995).[6]Kennedy J.,Eberhart R.,Shi Y.:Swarm intelligence,Academic Press,(2001).[7]Passino K.M.,Biomimicrt of Bacterial Foraging for Distributed Optimiza-tion,University Press,Princeton,New Jersey(2001).[8]Shilane D.,Martikainen J.,Dudoit S.,Ovaska S.J.,A general frameworkfor statistical performance comparison of evolutionary computation algo-rithms,Information Sciences:an Int.Journal,178,2870-2879(2008). [9]Yang X.S.,Nature-Inspired Metaheuristic Algorithms,Luniver Press,(2008).[10]Yang X.S.,Biology-derived algorithms in engineering optimizaton(Chap-ter32),in Handbook of Bioinspired Algorithms and Applications(eds Olar-ius&Zomaya),Chapman&Hall/CRC(2005).[11]Yang X.S.,Engineering Optimization:An Introduction with MetaheuristicApplications,Wiley(2010).。
不对称约束多人非零和博弈的自适应评判控制

第40卷第9期2023年9月控制理论与应用Control Theory&ApplicationsV ol.40No.9Sep.2023不对称约束多人非零和博弈的自适应评判控制李梦花,王鼎,乔俊飞†(北京工业大学信息学部,北京100124;计算智能与智能系统北京市重点实验室,北京100124;智慧环保北京实验室,北京100124;北京人工智能研究院,北京100124)摘要:本文针对连续时间非线性系统的不对称约束多人非零和博弈问题,建立了一种基于神经网络的自适应评判控制方法.首先,本文提出了一种新颖的非二次型函数来处理不对称约束问题,并且推导出最优控制律和耦合Hamilton-Jacobi方程.值得注意的是,当系统状态为零时,最优控制策略是不为零的,这与以往不同.然后,通过构建单一评判网络来近似每个玩家的最优代价函数,从而获得相关的近似最优控制策略.同时,在评判学习期间发展了一种新的权值更新规则.此外,通过利用Lyapunov理论证明了评判网络权值近似误差和闭环系统状态的稳定性.最后,仿真结果验证了本文所提方法的有效性.关键词:神经网络;自适应评判控制;自适应动态规划;非线性系统;不对称约束;多人非零和博弈引用格式:李梦花,王鼎,乔俊飞.不对称约束多人非零和博弈的自适应评判控制.控制理论与应用,2023,40(9): 1562–1568DOI:10.7641/CTA.2022.20063Adaptive critic control for multi-player non-zero-sum games withasymmetric constraintsLI Meng-hua,WANG Ding,QIAO Jun-fei†(Faculty of Information Technology,Beijing University of Technology,Beijing100124,China;Beijing Key Laboratory of Computational Intelligence and Intelligent System,Beijing100124,China;Beijing Laboratory of Smart Environmental Protection,Beijing100124,China;Beijing Institute of Artificial Intelligence,Beijing100124,China)Abstract:In this paper,an adaptive critic control method based on the neural networks is established for multi-player non-zero-sum games with asymmetric constraints of continuous-time nonlinear systems.First,a novel nonquadratic func-tion is proposed to deal with asymmetric constraints,and then the optimal control laws and the coupled Hamilton-Jacobi equations are derived.It is worth noting that the optimal control strategies do not stay at zero when the system state is zero, which is different from the past.After that,only a critic network is constructed to approximate the optimal cost function for each player,so as to obtain the associated approximate optimal control strategies.Meanwhile,a new weight updating rule is developed during critic learning.In addition,the stability of the weight estimation errors of critic networks and the closed-loop system state is proved by utilizing the Lyapunov method.Finally,simulation results verify the effectiveness of the method proposed in this paper.Key words:neural networks;adaptive critic control;adaptive dynamic programming;nonlinear systems;asymmetric constraints;multi-player non-zero-sum gamesCitation:LI Menghua,WANG Ding,QIAO Junfei.Adaptive critic control for multi-player non-zero-sum games with asymmetric constraints.Control Theory&Applications,2023,40(9):1562–15681引言自适应动态规划(adaptive dynamic programming, ADP)方法由Werbos[1]首先提出,该方法结合了动态规划、神经网络和强化学习,其核心思想是利用函数近似结构来估计最优代价函数,从而获得被控系统的近似最优解.在ADP方法体系中,动态规划蕴含最优收稿日期:2022−01−21;录用日期:2022−11−10.†通信作者.E-mail:***************.cn.本文责任编委:王龙.科技创新2030–“新一代人工智能”重大项目(2021ZD0112302,2021ZD0112301),国家重点研发计划项目(2018YFC1900800–5),北京市自然科学基金项目(JQ19013),国家自然科学基金项目(62222301,61890930–5,62021003)资助.Supported by the National Key Research and Development Program of China(2021ZD0112302,2021ZD0112301,2018YFC1900800–5),the Beijing Natural Science Foundation(JQ19013)and the National Natural Science Foundation of China(62222301,61890930–5,62021003).第9期李梦花等:不对称约束多人非零和博弈的自适应评判控制1563性原理提供理论基础,神经网络作为函数近似结构提供实现手段,强化学习提供学习机制.值得注意的是, ADP方法具有强大的自学习能力,在处理非线性复杂系统的最优控制问题上具有很大的潜力[2–7].此外, ADP作为一种近似求解最优控制问题的新方法,已经成为智能控制与计算智能领域的研究热点.关于ADP的详细理论研究以及相关应用,读者可以参考文献[8–9].本文将基于ADP的动态系统优化控制统称为自适应评判控制.近年来,微分博弈问题在控制领域受到了越来越多的关注.微分博弈为研究多玩家系统的协作、竞争与控制提供了一个标准的数学框架,包括二人零和博弈、多人零和博弈以及多人非零和博弈等.在零和博弈问题中,控制输入试图最小化代价函数而干扰输入试图最大化代价函数.在非零和博弈问题中,每个玩家都独立地选择一个最优控制策略来最小化自己的代价函数.值得注意的是,零和博弈问题已经被广泛研究.在文献[10]中,作者提出了一种改进的ADP方法来求解多输入非线性连续系统的二人零和博弈问题.An等人[11]提出了两种基于积分强化学习的算法来求解连续时间系统的多人零和博弈问题.Ren等人[12]提出了一种新颖的同步脱策方法来处理多人零和博弈问题.然而,关于非零和博弈[13–14]的研究还很少.此外,控制约束在实际应用中也广泛存在.这些约束通常是由执行器的固有物理特性引起的,如气压、电压和温度.因此,为了确保被控系统的性能,受约束的系统需要被考虑.Zhang等人[15]发展了一种新颖的事件采样ADP方法来求解非线性连续约束系统的鲁棒最优控制问题.Huo等人[16]研究了一类非线性约束互联系统的分散事件触发控制问题.Yang和He[17]研究了一类具有不匹配扰动和输入约束的非线性系统事件触发鲁棒镇定问题.这些文献考虑的都是对称约束,而实际应用中,被控系统受到的约束也可能是不对称的[18–20],例如在污水处理过程中,需要通过氧传递系数和内回流量对溶解氧浓度和硝态氮浓度进行控制,而根据实际的运行条件,这两个控制变量就需要被限制在一个不对称约束范围内[20].因此,在控制器设计过程中,不对称约束问题将是笔者研究的一个方向.到目前为止,关于具有控制约束的微分博弈问题,有一些学者取得了相应的研究成果[12,21–23].但可以发现,具有不对称约束的多人非零和博弈问题还没有学者研究.同时,在多人非零和博弈问题中,相关的耦合Hamilton-Jacobi(HJ)方程是很难求解的.因此,本文针对一类连续时间非线性系统的不对称约束多人非零和博弈问题,提出了一种自适应评判控制方法来近似求解耦合HJ方程,从而获得被控系统的近似最优解.本文的主要贡献如下:1)首次将不对称约束应用到连续时间非线性系统的多人非零和博弈问题中;2)提出了一种新颖的非二次型函数来处理不对称约束问题,并且当系统状态为零时,最优控制策略是不为零的,这与以往不同;3)在学习期间,用单一评判网络结构代替了传统的执行–评判网络结构,并且提出了一种新的权值更新规则;4)利用Lyapunov方法证明了评判网络权值近似误差和系统状态的一致最终有界(uniformly ultimately bounded,UUB)稳定性.2问题描述考虑以下具有不对称约束的N–玩家连续时间非线性系统:˙x(t)=f(x(t))+N∑j=1g j(x(t))u j(t),(1)其中:x(t)∈Ω⊂R n是状态向量且x(0)=x0为初始状态,R n代表由所有n-维实向量组成的欧氏空间,Ω是R n的一个紧集;u j(t)∈T j⊂R m为玩家j在时刻t所选择的策略,且T j为T j={[u j1u j2···u jm]T∈R m:u j min u jl u j max, |u j min|=|u j max|,l=1,2,···,m},(2)其中:u jmin∈R和u j max∈R分别代表控制输入分量的最小界和最大界,R表示所有实数集.假设1非线性系统(1)是可控的,并且x=0是被控系统(1)的一个平衡点.此外,∀j∈N,f(x)和g j(x)是未知的Lipschitz函数且f(0)=0,其中集合N={1,2,···,N},N 2是一个正整数.假设2∀j∈N,g j(0)=0,且存在一个正常数b gj使∥g j(x)∥ b gj,其中∥·∥表示在R n上的向量范数或者在R n×m上的矩阵范数,R n×m代表由所有n×m维实矩阵组成的空间.注1假设1–3是自适应评判领域的常用假设,例如文献[6,13,19],是为了保证系统的稳定性以及方便后文中的稳定性证明,其中假设3出现在后文中的第3.2节.定义与每个玩家相关的效用函数为U i(x,U)=x T Q i x+N∑j=1S j(u j),i∈N,(3)其中U={u1,u2,···,u N}并且Q i是一个对称正定矩阵.此外,为了处理不对称约束问题,令S j(u j)为S j(u j)=2αj m∑l=1ujlβjtanh−1(z−βjαj)d z,(4)其中αj和βj分别为αj=u jmax−u j min2,βj=u jmax+u jmin2.(5)因此,与每个玩家相关的代价函数可以表示为J i(x0,U)=∞U i(x,U)dτ,i∈N,(6)1564控制理论与应用第40卷本文希望构建一个Nash均衡U∗={u∗1,u∗2,···,u∗N},来使以下不等式被满足:J i(u∗1,···,u∗i,···,u∗N)J i(u∗1,···,u i,···,u∗N),(7)其中i∈N.为了方便,将J i(x0,U)简写为J i(x0).于是,每个玩家的最优代价函数为J∗i (x0)=minu iJ i(x0,U),i∈N.(8)在本文中,如果一个控制策略集的所有元素都是可容许的,那么这个集合是可容许的.定义1(容许控制[24])如果控制策略u i(x)是连续的,u i(x)可以镇定系统(1),并且J i(x0)是有限的,那么它是集合Ω上关于代价函数(6)的可容许控制律,即u i(x)∈Ψ(Ω),i∈N,其中,Ψ(Ω)是Ω上所有容许控制律的集合.对于任意一个可容许控制律u i(x)∈Ψ(Ω),如果相关代价函数(6)是连续可微的,那么非线性Lyapu-nov方程为0=U i(x,U)+(∇J i(x))T(f(x)+N∑j=1g j(x)u j),(9)其中:i∈N,J i(0)=0,并且∇(·) ∂(·)∂x.根据最优控制理论,耦合HJ方程为0=minU H i(x,U,∇J∗i(x)),i∈N,(10)其中,Hamiltonian函数H i(x,U,∇J∗i(x))为H i(x,U,∇J∗i(x))=U i(x,U)+(∇J∗i (x))T(f(x)+N∑j=1g j(x)u j),(11)进而,由∂H i(x,U,∇J∗i(x))∂u i=0可得出最优控制律为u∗i (x)=−αi tanh(12αig Ti(x)∇J∗i(x))+¯βi,i∈N,(12)其中¯βi=[βiβi···βi]T∈R m.注2根据式(2)和式(5),能推导出βi=0,即¯βi=0,又根据式(12)可知u∗i(0)=0,i∈N.因此,为了保证x=0是系统(1)的平衡点,在假设2中提出了条件∀j∈N,g j(0)=0.将式(12)代入式(10),耦合HJ方程又能表示为(∇J∗i (x))T f(x)+N∑j=1((∇J∗i(x))T g j(x)¯βj)+x T Q i x−N∑j=1((∇J∗i(x))Tαj g j(x)tanh(A j(x)))+N∑j=1S j(−αj tanh(A j(x))+¯βj)=0,i∈N,(13)其中J∗i(0)=0并且A j(x)=12αjg Tj(x)∇J∗j(x).如果已知每个玩家的最优代价函数值,那么相关的最优状态反馈控制律就可以直接获得,也就是说式(13)是可解的.可是,式(13)这种非线性偏微分方程的求解是十分困难的.同时,随着系统维数的增加,存储量和计算量也随之以指数形式增加,也就是平常所说的“维数灾”问题.因此,为了克服这些弱点,在第3部分提出了一种基于神经网络的自适应评判机制,来近似每个玩家的最优代价函数,从而获得相关的近似最优状态反馈控制策略.3自适应评判控制设计3.1神经网络实现本节的核心是构建并训练评判神经网络,以得到训练后的权值,从而获得每个玩家的近似最优代价函数值.首先,根据神经网络的逼近性质[25],可将每个玩家的最优代价函数J∗i(x)在紧集Ω上表示为J∗i(x)=W Tiσi(x)+ξi(x),i∈N,(14)其中:W i∈Rδ是理想权值向量,σi(x)∈Rδ是激活函数,δ是隐含层神经元个数,ξi(x)∈R是重构误差.同时,可得出每个玩家的最优代价函数梯度为∇J∗i(x)=(∇σi(x))T W i+∇ξi(x),i∈N,(15)将式(15)代入式(12),有u∗i(x)=−αi tanh(B i(x)+C i(x))+¯βi,i∈N,(16)其中:B i(x)=12αig Ti(x)(∇σi(x))T W i∈R m,C i(x)=12αig Ti(x)∇ξi(x)∈R m.然后,将式(15)代入式(13),耦合HJ方程变为W Ti∇σi(x)f(x)+(∇ξi(x))T f(x)+x T Q i x+N∑j=1((W Ti∇σi(x)+(∇ξi(x))T)g j(x)¯βj)−N∑j=1(αj W Ti∇σi(x)g j(x)tanh(B j(x)+C j(x)))−N∑j=1(αj(∇ξi(x))T g j(x)tanh(B j(x)+C j(x)))+N∑j=1S j(−αj tanh(B j(x)+C j(x))+¯βj)=0,i∈N.(17)值得注意的是,式(14)中的理想权值向量W i是未知的,也就是说式(16)中的u∗i(x)是不可解的.因此,第9期李梦花等:不对称约束多人非零和博弈的自适应评判控制1565构建如下的评判神经网络:ˆJ∗i (x)=ˆW Tiσi(x),i∈N,(18)来近似每个玩家的最优代价函数,其中ˆW i∈Rδ是估计的权值向量.同时,其梯度为∇ˆJ∗i(x)=(∇σi(x))TˆW i,i∈N.(19)考虑式(19),近似的最优控制律为ˆu∗i(x)=−αi tanh(D i(x))+¯βi,i∈N,(20)其中D i(x)=12αig Ti(x)(∇σi(x))TˆW i.同理,近似的Hamiltonian可以写为ˆHi(x,ˆW i)=ˆW T i ϕi+x T Q i x+N∑j=1(ˆW Ti∇σi(x)g j(x)¯βj)−N ∑j=1(αjˆW Ti∇σi(x)g j(x)tanh(D j(x)))+N∑j=1S j(−αj tanh(D j(x))+¯βj),i∈N,(21)其中ϕi=∇σi(x)f(x).此外,定义误差量e i=ˆH i(x,ˆW i )−H i(x,U∗,∇J∗i(x))=ˆH i(x,ˆW i).为了使e i足够小,需要训练评判网络来使目标函数E i=12e Tie i最小化.在这里,本文采用的训练准则为˙ˆW i =−γi1(1+ϕTiϕi)2(∂E i∂ˆW i)=−γiϕi(1+ϕTiϕi)2e i,i∈N,(22)其中:γi>0是评判网络的学习率,(1+ϕT iϕi)2用于归一化操作.此外,定义评判网络的权值近似误差为˜Wi=W i−ˆW i.因此,有˙˜W i =γiφi1+ϕTiϕie Hi−γiφiφT i˜W i,i∈N,(23)其中:φi=ϕi(1+ϕTiϕi),e Hi=−(∇ξi(x))T f(x)是残差项.3.2稳定性分析本节的核心是通过利用Lyapunov方法讨论评判网络权值近似误差和闭环系统状态的UUB稳定性.这里,给出以下假设:假设3∥∇ξi(x)∥ b∇ξi ,∥∇σi(x)∥ b∇σi,∥e Hi∥ b e Hi,∥W i∥ b W i,其中:b∇ξi,b∇σi,b e Hi,b W i 都是正常数,i∈N.定理1考虑系统(1),如果假设1–3成立,状态反馈控制律由式(20)给出,且评判网络权值通过式(22)进行训练,则评判网络权值近似误差˜W i是UUB 稳定的.证选取如下的Lyapunov函数:L1(t)=N∑i=1(12˜W Ti˜Wi)=N∑i=1L1i(t),(24)计算L1i(t)沿着式(23)的时间导数,即˙L1i(t)=γi˜W Tiφi1+ϕTiϕie Hi−γi˜W TiφiφTi˜Wi,i∈N,(25)利用不等式¯X T¯Y12∥¯X∥2+12∥¯Y∥2(注:¯X和¯Y都是具有合适维数的向量),并且考虑1+ϕTiϕi 1,能得到˙L1i(t)γi2(∥φTi˜Wi∥2+∥e Hi∥2)−γi˜W TiφiφTi˜Wi=−γi2˜W TiφiφTi˜Wi+γi2∥e Hi∥2,i∈N.(26)根据假设3,有˙L1i(t) −γi2λmin(φiφTi)∥˜W i∥2+γi2b2e Hi,i∈N,(27)其中λmin(·)表示矩阵的最小特征值.因此,当不等式∥˜W i∥>√b2e Hiλmin(φiφTi),i∈N(28)成立时,有˙L1i(t)<0.根据标准的Lyapunov定理[26],可知评判网络权值近似误差˜W i是UUB稳定的.证毕.定理2考虑系统(1),如果假设1–3成立,状态反馈控制律由式(20)给出,且评判网络权值通过式(22)进行训练,则系统状态x(t)是UUB稳定的.证选取如下的Lyapunov函数:L2i(t)=J∗i(x),i∈N.(29)计算L2i(t)沿着系统˙x=f(x)+N∑j=1g j(x)ˆu∗j的时间导数,即˙L2i(t)=(∇J∗i(x))T(f(x)+N∑j=1g j(x)ˆu∗j)=(∇J∗i(x))T(f(x)+N∑j=1g j(x)u∗j)+N∑j=1((∇J∗i(x))T g j(x)(ˆu∗j−u∗j)),i∈N.(30)考虑式(13),有˙L2i(t)=−x T Q i x−N∑j=1S j(u∗j)+N∑j=1((∇J∗i(x))T g j(x)(ˆu∗j−u∗j))Σi,i∈N,(31)1566控制理论与应用第40卷利用不等式¯XT ¯Y 12∥¯X ∥2+12∥¯Y ∥2,并且考虑式(15)–(16)(20),可得Σi 12N ∑j =1∥−αj tanh (D j (x ))+αj tanh (F j (x ))∥2+12N ∑j =1∥g Tj (x )((∇σi (x ))T W i +∇ξi (x ))∥2,i ∈N ,(32)其中F j (x )=B j (x )+C j (x ).然后,利用不等式∥¯X+¯Y∥2 2∥¯X ∥2+2∥¯Y ∥2,有Σi N ∑j =1(∥αj tanh (D j (x ))∥2+∥αj tanh (F j (x ))∥2)+N ∑j =1∥g Tj (x )(∇σi (x ))T W i ∥2+N ∑j =1∥g T j (x )∇ξi (x )∥2,i ∈N ,(33)其中D j (x )∈R m ,F j (x )∈R m 分别被表示为[D j 1(x )D j 2(x )···D jm (x )]T 和[F j 1(x )F j 2(x )···F jm (x )]T .易知,∀θ∈R ,tanh 2θ 1.因此,有∥tanh (D j (x ))∥2=m ∑l =1tanh 2(D jl (x )) m,(34)∥tanh (F j (x ))∥2=m ∑l =1tanh 2(F jl (x )) m.(35)同时,根据假设2–3,有Σi N ∑j =1(2α2j m +b 2g j b 2∇σi b 2W i +b 2g j b 2∇ξi ),i ∈N ,(36)根据式(2)(4)–(5),可知S j (u ∗j ) 0.于是,有˙L2i (t ) −λmin (Q i )∥x ∥2+ϖi ,i ∈N ,(37)其中ϖi =N ∑j =1(2α2j m +b 2g j b 2∇σi b 2W i +b 2g j b 2∇ξi ).因此,根据式(37)可知,当不等式∥x ∥>√ϖiλmin (Q i )成立时,有˙L2i (t )<0.即,如果x (t )满足下列不等式:∥x ∥>max {√ϖ1λmin (Q 1),···,√ϖNλmin (Q N )},(38)则,∀i ∈N ,都有˙L 2i (t )<0.同理,可得闭环系统状态x (t )也是UUB 稳定的.证毕.4仿真结果考虑如下的3–玩家连续时间非线性系统:˙x =[−1.2x 1+1.5x 2sin x 20.5x 1−x 2]+[01.5sin x 1cos x 1]u 1(x )+[1.2sin x 1cos x 2]u 2(x )+[01.1sin x 2]u 3(x ),(39)其中:x (t )=[x 1x 2]T ∈R 2是状态向量,u 1(x )∈T 1={u 1∈R :−1 u 1 2},u 2(x )∈T 2={u 2∈R :−0.2 u 2 1}和u 3(x )∈T 3={u 3∈R :−0.4 u 3 0.8}是控制输入.令Q 1=2I 2,Q 2=1.8I 2,Q 3=0.3I 2,其中I 2代表2×2维单位矩阵.同时,根据式(5)可知,α1=1.5,β1=0.5,α2=0.6,β2=0.4,α3=0.6,β3=0.2.因此,与每个玩家相关的代价函数可以表示为J i (x 0)= ∞0(x TQ i x +3∑j =1S j (u j ))d τ,i =1,2,3,(40)其中S j (u j )=2αju jβj tanh −1(z −βjαj)d z =2αj (u j −βj )tanh −1(u j −βjαj)+α2j ln (1−(u j −βj )2α2j).(41)然后,本文针对系统(39)构建3个评判神经网络,每个玩家的评判神经网络权值分别为ˆW1=[ˆW 11ˆW 12ˆW13]T ,ˆW 2=[ˆW 21ˆW 22ˆW 23]T ,ˆW 3=[ˆW 31ˆW 32ˆW33]T ,激活函数被定义为σ1(x )=σ2(x )=σ3(x )=[x 21x 1x 2x 22]T,且隐含层神经元个数为δ=3.此外,系统初始状态取x 0=[0.5−0.5]T ,每个评判神经网络的学习率分别为γ1=1.5,γ2=0.8,γ3=0.2,且每个评判神经网络的初始权值都在0和2之间选取.最后,引入探测噪声η(t )=sin 2(−1.2t )cos(0.5t )+cos(2.4t )sin 3(2.4t )+sin 5t +sin 2(1.12t )+sin 2t ×cos t +sin 2(2t )cos(0.1t ),使得系统满足持续激励条件.执行学习过程,本文发现每个玩家的评判神经网络权值分别收敛于[6.90912.99046.6961]T ,[4.89012.23475.2062]T ,[1.79450.33212.4583]T .在60个时间步之后去掉探测噪声,每个玩家的评判网络权值收敛过程如图1–3所示.然后,将训练好的权值代入式(20),能得到每个玩家的近似最优控制律,将其应用到系统(39),经过10个时间步之后,得到的状态轨迹和控制轨迹分别如图4–5所示.由图4可知,系统状态最终收敛到了平衡点.由图5可知,每个玩家的控制轨迹都没有超出预定的边界,并且可以观察到u 1,u 2和u 3分别收敛于0.5,0.4和0.2.综上所述,仿真结果验证了所提方法的有效性.第9期李梦花等:不对称约束多人非零和博弈的自适应评判控制1567䇴 㖁㔌U / s图1玩家1的评判网络权值收敛过程Fig.1Convergence process of the critic network weights forplayer1䇴 㖁㔌U / s图2玩家2的评判网络权值收敛过程Fig.2Convergence process of the critic network weights forplayer2﹣䇴 㖁㔌U / s图3玩家3的评判网络权值收敛过程Fig.3Convergence process of the critic network weights forplayer 35结论本文首次将不对称约束应用到连续时间非线性系统的多人非零和博弈问题中.首先,获得了最优状态反馈控制律和耦合HJ 方程,并且为了解决不对称约束问题,建立了一种新的非二次型函数.值得注意的是,当系统状态为零时,最优控制策略是不为零的.其次,由于耦合HJ 方程不易求解,提出了一种基于神经网络的自适应评判算法来近似每个玩家的最优代价函数,从而获得相关的近似最优控制律.在实现过程中,用单一评判网络结构代替了经典的执行–评判结构,并且建立了一种新的权值更新规则.然后,利用Lyap-unov 理论讨论了评判网络权值近似误差和系统状态的UUB 稳定性.最后,仿真结果验证了所提算法的可行性.在未来的工作中,会考虑将事件驱动机制引入到连续时间非线性系统的不对称约束多人非零和博弈问题中,并且将该研究内容应用到污水处理系统中也是笔者的一个重点研究方向.﹣0.5﹣0.4﹣0.3﹣0.2﹣0.10.00.10.20.00.10.20.30.40.5(U )Y 1(U )Y 2图4系统(39)的状态轨迹Fig.4State trajectory of the system (39)0.00.51.01.52.00.00.20.40.60.81.01.200.012345678910﹣0.40.4﹣0.20.2(U )V 3(U )V 2(U )V 1U / s 012345678910U / s 012345678910U / s (c)(b)(a)(U )V 1(U )V 2(U )V 3图5系统(39)的控制轨迹Fig.5Control trajectories of the system (39)1568控制理论与应用第40卷参考文献:[1]WERBOS P J.Beyond regression:New tools for prediction andanalysis in the behavioral sciences.Cambridge:Harvard Universi-ty,1974.[2]HONG Chengwen,FU Yue.Nonlinear robust approximate optimaltracking control based on adaptive dynamic programming.Control Theory&Applications,2018,35(9):1285–1292.(洪成文,富月.基于自适应动态规划的非线性鲁棒近似最优跟踪控制.控制理论与应用,2018,35(9):1285–1292.)[3]CUI Lili,ZHANG Yong,ZHANG Xin.Event-triggered adaptive dy-namic programming algorithm for the nonlinear zero-sum differential games.Control Theory&Applications,2018,35(5):610–618.(崔黎黎,张勇,张欣.非线性零和微分对策的事件触发自适应动态规划算法.控制理论与应用,2018,35(5):610–618.)[4]WANG D,HA M,ZHAO M.The intelligent critic framework foradvanced optimal control.Artificial Intelligence Review,2022,55(1): 1–22.[5]WANG D,QIAO J,CHENG L.An approximate neuro-optimal solu-tion of discounted guaranteed cost control design.IEEE Transactions on Cybernetics,2022,52(1):77–86.[6]YANG X,HE H.Adaptive dynamic programming for decentralizedstabilization of uncertain nonlinear large-scale systems with mis-matched interconnections.IEEE Transactions on Systems,Man,and Cybernetics:Systems,2020,50(8):2870–2882.[7]ZHAO B,LIU D.Event-triggered decentralized tracking control ofmodular reconfigurable robots through adaptive dynamic program-ming.IEEE Transactions on Industrial Electronics,2020,67(4): 3054–3064.[8]WANG Ding.Research progress on learning-based robust adaptivecritic control.Acta Automatica Sinica,2019,45(6):1037–1049.(王鼎.基于学习的鲁棒自适应评判控制研究进展.自动化学报, 2019,45(6):1037–1049.)[9]ZHANG Huaguang,ZHANG Xin,LUO Yanhong,et al.An overviewof research on adaptive dynamic programming.Acta Automatica Sini-ca,2013,39(4):303–311.(张化光,张欣,罗艳红,等.自适应动态规划综述.自动化学报, 2013,39(4):303–311.)[10]L¨U Yongfeng,TIAN Jianyan,JIAN Long,et al.Approximate-dynamic-programming H∞controls for multi-input nonlinear sys-tem.Control Theory&Applications,2021,38(10):1662–1670.(吕永峰,田建艳,菅垄,等.非线性多输入系统的近似动态规划H∞控制.控制理论与应用,2021,38(10):1662–1670.)[11]AN P,LIU M,WAN Y,et al.Multi-player H∞differential gameusing on-policy and off-policy reinforcement learning.The16th In-ternational Conference on Control and Automation.Electr Network: IEEE,2020,10:1137–1142.[12]REN H,ZHANG H,MU Y,et al.Off-policy synchronous iterationIRL method for multi-player zero-sum games with input constraints.Neurocomputing,2020,378:413–421.[13]LIU D,LI H,WANG D.Online synchronous approximate optimallearning algorithm for multiplayer nonzero-sum games with unknown dynamics.IEEE Transactions on Systems,Man,and Cybernetics: Systems,2014,44(8):1015–1027.[14]V AMVOUDAKIS K G,LEWIS F L.Non-zero sum games:Onlinelearning solution of coupled Hamilton-Jacobi and coupled Riccati equations.IEEE International Symposium on Intelligent Control.Denver,CO,USA:IEEE,2011,9:171–178.[15]ZHANG H,ZHANG K,XIAO G,et al.Robust optimal controlscheme for unknown constrained-input nonlinear systems via a plug-n-play event-sampled critic-only algorithm.IEEE Transactions on Systems,Man,and Cybernetics:Systems,2020,50(9):3169–3180.[16]HUO X,KARIMI H R,ZHAO X,et al.Adaptive-critic design fordecentralized event-triggered control of constrained nonlinear inter-connected systems within an identifier-critic framework.IEEE Trans-actions on Cybernetics,2022,52(8):7478–7491.[17]YANG X,HE H.Event-triggered robust stabilization of nonlin-ear input-constrained systems using single network adaptive critic designs.IEEE Transactions on Systems,Man,and Cybernetics:Sys-tems,2020,50(9):3145–3157.[18]WANG L,CHEN C L P.Reduced-order observer-based dynamicevent-triggered adaptive NN control for stochastic nonlinear systems subject to unknown input saturation.IEEE Transactions on Neural Networks and Learning Systems,2021,32(4):1678–1690.[19]YANG X,ZHU Y,DONG N,et al.Decentralized event-driven con-strained control using adaptive critic designs.IEEE Transactions on Neural Networks and Learning Systems,2022,33(10):5830–5844.[20]WANG D,ZHAO M,QIAO J.Intelligent optimal tracking withasymmetric constraints of a nonlinear wastewater treatment system.International Journal of Robust and Nonlinear Control,2021,31(14): 6773–6787.[21]LI M,WANG D,QIAO J,et al.Neural-network-based self-learningdisturbance rejection design for continuous-time nonlinear con-strained systems.Proceedings of the40th Chinese Control Confer-ence.Shanghai,China:IEEE,2021,7:2179–2184.[22]SU H,ZHANG H,JIANG H,et al.Decentralized event-triggeredadaptive control of discrete-time nonzero-sum games over wireless sensor-actuator networks with input constraints.IEEE Transactions on Neural Networks and Learning Systems,2020,31(10):4254–4266.[23]YANG X,HE H.Event-driven H∞-constrained control using adap-tive critic learning.IEEE Transactions on Cybernetics,2021,51(10): 4860–4872.[24]ABU-KHALAF M,LEWIS F L.Nearly optimal control laws for non-linear systems with saturating actuators using a neural network HJB approach.Automatica,2005,41(5):779–791.[25]HORNIK K,STINCHCOMBE M,WHITE H.Universal approxima-tion of an unknown mapping and its derivatives using multilayer feed-forward networks.Neural Networks,1990,3(5):551–560.[26]LEWIS F L,JAGANNATHAN S,YESILDIREK A.Neural NetworkControl of Robot Manipulators and Nonlinear Systems.London:Tay-lor&Francis,1999.作者简介:李梦花博士研究生,目前研究方向为自适应动态规划、智能控制,E-mail:*********************;王鼎教授,博士生导师,目前研究方向为智能控制、强化学习,E-mail:*****************.cn;乔俊飞教授,博士生导师,目前研究方向为智能计算、智能优化控制,E-mail:***************.cn.。
AdaptableUIforWe...
Adaptable UI for Web Service Composition:A Model-Driven ApproachWaldemar Ferreira NetoSupervised by:Philippe ThiranPReCISE Research Center,University of Namur,5000,Belgium{o,pthiran}@fundp.ac.beAbstract.The main objective of this work is to provide User Interfaces(UI)for Web service compositions(WSC).We aim at investigating howuser interfaces and their navigation can be derived from the WSC struc-tures(data and controlflows).We propose a model-driven engineeringapproach that provides models and transformational methods that allowderiving and adapting UI for any context of use.Keywords:Web service composition,model-driven engineering,userinterface,adaptation.1IntroductionWeb services have gained attention due to the pressing need for integrating heterogeneous systems.A Web service is a software system designed to support interoperable machine-to-machine interactions over a network.It has an interface described in a machine-processable format.A main advantage of Web services is their ability of being composed.A Web service composition(WSC)consists in combining several Web services in a same process,in order to address complex user’s needs that a single Web service could not satisfy[2].There are several initiatives to provide languages that allow the description of a Web service composition.The current WSC languages are expressive enough to describe fully automated processes to build Web service compositions[2].How-ever,full-automated processes cannot represent all real-life scenarios specially those that need user interactions.In these scenarios,a user interaction may range from simple approvals to elaborate interactions where the user performs a complex data entry,for example,filling several forms.Any computer system that involves users needs user interfaces(UI)to permit the interactions between the system and the user.The users of a WSC can interact with it through diverse devices(Desktop,Smart Phone,Tablet,among others)in diverse modalities(visual,aural,tactile,etc.).The adaptability of the UIs for a WSC has become necessary due to the variety of contexts of use.In this work,we propose a model-driven engineering(MDE)approach for pro-viding adaptable UIs from WSC.In particular,the approach relies on a mod-elization of user interactions within the WSC.Based on this modelization,the G.Pallis et al.(Eds.):ICSOC2011,LNCS7221,pp.177–182,2012.c Springer-Verlag Berlin Heidelberg2012oapproach proposes a method to derive an abstract representation of the UI from a WSC.Interestingly,the derivation rules rely on the data/controlflow of the WSC for specifying the navigation through the UIs.The obtained abstract rep-resentation can then be adapted to any specific context of use.The remainder of this work is organized as follows.An overview of the works about user interactions and Web service composition is given in Section2.Section 3explores the research challenges associated with the generation of UI from WSC.Section4proposes an MDE approach to deal with challenges that were identified.Section5offers a preliminary plan for realizing our MDE approach and Section6concludes.2Related WorkThere are several approaches that permit interactions between users and Web services.In some of these approaches,the information about the Web service (which can be WSDL or OWL-S)is used to infer a suitable user interface(e.g., [8]).To increase the usability of generated used interfaces,some approaches use additional information like UI annotation[9],platform-specific description[12], or user context[14].In these approaches,the UI generation relies on type of the input and output described on the Web service description.The development of Web interfaces for Web services has been addressed by the Web engineering community by the means of model-driven Web design ap-proaches[15]and[4].These approaches propose a model-based development method for process-based Web applications that use Web services.The former approach describes the Web service composition by BPMN and the UI naviga-tion is described by a web-specific visual modeling language,WebML[4].The latter relies on BPMN too,but the UI navigation is described on an object-oriented modeling language,OOWS[15].Based on HTML templates,a set of UIs can be automatically generated form the WSC,and the navigation among these UIs is driven by the navigation model.Another work that generates user interfaces for Web services is the Dynvoker [13].This approach interprets a determined Web service and generates Web forms according to the Web service operation.Based on a BPEL-like language (GUI4CWS)this approach allows to handle complex service interaction scenar-ios.There are other approaches that allow a similar UI generation,but these approaches consider multiples actors[5]or/and context-aware UIs[11].Other approaches generate UI for Web services based on the annotated Web service descriptions and the UI defined from a task model[17].The annotations are used to generate the UI for the Web services and the task model drives the navigation among the UIs and Web services.As such,these approaches do separate the data/controlflows of the WSC and the UI navigation model.Other works aim at extending WSC descriptions with user interactions.An example of such extensions is BPEL4People[1],which introduces user actors into a Web service composition by defining a new type of BPEL activity to specify user tasks.However,this extension focuses only on the user task andAdaptable UI for Web Service Composition:A Model-Driven Approach179 does not deal with the design of a user interface for the Web service compo-sition.Another example of BPEL extensions that addresses the user interac-tion is BPEL4UI(Business Process Execution Language for User Interface)[6]. BPEL4UI extends the Partner Link part of BPEL in order to allow defining a binding between BPEL activities and an existing UI.This user interface is devel-oped separately from the composition instead to be generated.In another work, Lee et al.[10]extend BPEL by adding interactive activities that are embedded in the BPEL code.Unlike BPEL4UI,this work specifies the UI together with the WSC,however the UI is specified for a unique context of use.3Research ChallengesThe main objective of this work is to derive adaptable UI from WSC.In the following,we present the research challenges that must be tackled to achieve this objective.First,we need to investigate how user interactions can be integrated within WSC.Concretely,WSC must be extended with user interaction activities that express the different possible types of user interactions[16]:data input interac-tion,data output interaction,data selection,and interaction by user event.Another challenge is the fact that the navigation and the composition of the UI can rely on the control/dataflow structures of the WSC extended with user interaction activities.A simple example of generation is given in Figure1that presents a simple travel reservation management.This WSC comprises three user interaction actives.The UI generation can lead to a UI grouping of the two first user interactions activities(initializing Service and transportation means selection)as data provided by these user interactions are mutually independent. However,this UI could not comprise the third user interaction activity(providing license number),as the user interaction will only be enable if the transportation means is the private car.The last challenge is to be able to generate a UI adapted to the user context (user preference,user environment,and user platform)and the usability criteria (e.g.,the size of the device screen).4Proposed ApproachWe propose a Model-driven Engineering(MDE)approach that provides models and transformations for deriving and adapting UI from WSC and the context of use.We identify3main models and3main methodological steps.4.1ModelsOur MDE approach relies on3models:–UI-WSC:an extension of WSC with user interaction activities.To be com-pliant with current standards,the model is to rely on existing standards:a standard for WSC(e.g.BPEL)and a standard for describing user interfaces(iXML).oFig.1.Web service composition to manage travel reservations–Abstract user interface(AUI):this model describes the UI independently to any interaction modality(e.g.graphical modal,vocal modal)and com-puting platform(e.g.PC,smart phone).This model only specifies the UI components,their elements,and the navigation among the components.–Concrete user interface(CUI):this model is an adaptation of an AUI toa specific context of use(user preference,environment,and platform).Forexample,for visually handicapped person,an output abstract component could be transformed to a(concrete)vocal output.4.2MethodOur MDE method consists in3main steps:–Modeling:where the WSCs are modelized within its user interactions by a designer using the UI-WSC.–Transformation:where the AUI is derived by applying transformations to the UI-WSC model.–Adaptation:where the CUI is derived from the AUI and the context of use.Additionally,the user can interact with the CUI through an interpreter, while a runtime component arbitrates the communication between the CUI and the WSC.Adaptable UI for Web Service Composition:A Model-Driven Approach181 5Research MethodologyThefirst part of our research consists in the definition of the different models of our MDE approach.In particular,we investigate and modelize how the user interaction can be specified within WSCs.Our goal here is to propose a extension to WSC meta-model(UI-WSC meta-model)with the user interaction activities representing the different possible types of user interactions.For the AUI and CUI meta-models,we refer to existing works in UI meta-modeling.Next,we define the transformation rules for deriving an AUI description from a UI-WSC model.We plan to define these rules in an incremental way:starting with simple UI-WSC patterns(e.g.,input/output sequence,choice)to continue with more complex ones(e.g.,loop or interruptible area).AUI adaptation is the next step.As there are existing approaches,we plan to investigate and evaluate these approaches so that we can to adopt the more suitable to our approach.As a proof of concept,we develop a tool that not only supports the three main steps of your MDE method(design)but also orchestrate the WSC execution and the user interactions with the user(runtime).Finally,we evaluate our approach.Wefirst aim at evaluating our approach against other approaches(e.g.[6,15]and[4]).As comparison criteria,we adopt the usability criteria proposed by the ISO9241[7]:satisfaction,effectiveness,and efficiency.We also aim at evaluating our approach in real scenarios with real users. 6ConclusionIn this work,we propose an MDE approach for providing adaptable UI from WSC.This approach aims at specifying all types of user interactions within WSC process,as well as the derivation of an abstract representation of the UI. The derivation rules rely on the data/controlflow of the WSC for specifying the navigation through these abstract representations.Finally,the obtained repre-sentation can then be materialized to any specific context of use in order to provide an adapted UI.So far,we have reviewed the literature about the users interactions and Web services.We have already proposed a BPEL extension able to modelize all types of user interactions within WSC processes,named UI-BPEL meta-model[3].We have also implemented a design tool that is dedicated to edit a WSC conform to our UI-BPEL meta-model.The tool is an Eclipse plug-in based on the Eclipse BPEL Designer1.As future work,we plan to work on the transformation rules for deriving AUI from UI-BPEL and integrate these rules into our modeling tool. References1.Agrawal,A.,Amend,M.,Das,M.,Ford,M.,Keller,C.,Kloppmann,M.,K¨o nig,D.,Leymann,F.,M¨u ller,R.,Pfau,G.,et al.:Ws-bpel extension for people,bpel4people (2007)1http://webapps.fundp.ac.be/wse/wiki/pmwiki.php?n=Projects.UIBPELo2.ter Beek,M.H.,Bucchiarone,A.,Gnesi,S.:Web service composition approaches:From industrial standards to formal methods.In:ICIW,p.15.IEEE Computer Society(2007)3.Boukhebouze,M.,Neto,W.P.F.,Erbin,L.:Yet Another BPEL Extension for UserInteractions.In:De Troyer,O.,Bauzer Medeiros,C.,Billen,R.,Hallot,P.,Simitsis,A.,Van Mingroot,H.(eds.)ER Workshops2011.LNCS,vol.6999,pp.24–33.Springer,Heidelberg(2011)4.Brambilla,M.,Dosmi,M.,Fraternali,P.:Model-driven engineering of service or-chestrations.In:Proceedings of the7th Congress on Services,pp.562–569.IEEE Computer Society,Washington,DC(2009)5.Daniel,F.,Casati,F.,Benatallah,B.,Shan,M.-C.:Hosted Universal Composition:Models,Languages and Infrastructure in mashArt.In:Laender,A.H.F.,Castano, S.,Dayal,U.,Casati,F.,de Oliveira,J.P.M.(eds.)ER2009.LNCS,vol.5829,pp.428–443.Springer,Heidelberg(2009)6.Daniel,F.,Soi,S.,Tranquillini,S.,Casati,F.,Heng,C.,Yan,L.:From People toServices to UI:Distributed Orchestration of User Interfaces.In:Hull,R.,Mendling, J.,Tai,S.(eds.)BPM2010.LNCS,vol.6336,pp.310–326.Springer,Heidelberg (2010)7.ISO(ed.):ISO9241-11:Ergonomic requirements for office work with visual displayterminals(VDTs)–Part9:Requirements for non-keyboard input devices(2000) 8.Kassoff,M.,Kato,D.,Mohsin,W.:Creating GUIs for web services.IEEE InternetComputing7(5),66–73(2003)9.Khushraj,D.,Lassila,O.:Ontological Approach to Generating Personalized UserInterfaces for Web Services.In:Gil,Y.,Motta,E.,Benjamins,V.R.,Musen,M.A.(eds.)ISWC2005.LNCS,vol.3729,pp.916–927.Springer,Heidelberg(2005) 10.Lee,J.,Lin,Y.Y.,Ma,S.P.,Lee,S.J.:BPEL extensions to user-interactive servicedelivery.J.Inf.Sci.Eng.25(5),1427–1445(2009)11.Pietschmann,S.,Voigt,M.,R¨u mpel,A.,Meißner,K.:CRUISe:Composition ofRich User Interface Services.In:Gaedke,M.,Grossniklaus,M.,D´ıaz,O.(eds.) ICWE2009.LNCS,vol.5648,pp.473–476.Springer,Heidelberg(2009)12.Song,K.,Lee,K.H.:Generating multimodal user interfaces for web services.Inter-acting with Computers20(4-5),480–490(2008)13.Spillner,J.,Feldmann,M.,Braun,I.,Springer,T.,Schill,A.:Ad-Hoc Usage of WebServices with Dynvoker.In:M¨a h¨o nen,P.,Pohl,K.,Priol,T.(eds.)ServiceWave 2008.LNCS,vol.5377,pp.208–219.Springer,Heidelberg(2008)14.Steele,R.,Khankan,K.,Dillon,T.S.:Mobile web services discovery and invocationthrough auto-generation of abstract multimodal interface.In:ITCC(2),pp.35–41.IEEE Computer Society(2005)15.Torres,V.,Pelechano,V.:Building Business Process Driven Web Applications.In:Dustdar,S.,Fiadeiro,J.L.,Sheth,A.P.(eds.)BPM2006.LNCS,vol.4102,pp.322–337.Springer,Heidelberg(2006)16.Trewin,S.,Zimmermann,G.,Vanderheiden,G.C.:Abstract representations as abasis for usable user interfaces.Interacting with Computers16(3),477–506(2004) 17.Vermeulen,J.,Vandriessche,Y.,Clerckx,T.,Luyten,K.,Coninx,K.:Service-Interaction Descriptions:Augmenting Services with User Interface Models.In:Gul-liksen,J.,Harning,M.B.,van der Veer,G.C.,Wesson,J.(eds.)EIS2007.LNCS, vol.4940,pp.447–464.Springer,Heidelberg(2008)。
AED-Net——异常事件检测网络

Contents lists available at ScienceDirect
Engineering
Research Artificial Intelligence—Article
AED-Net: An Abnormal Event Detection Network
Some methods have been suggested to deal with abnormal event detection. For example, Ref. [10] proposes a method based on histograms of the optical flow orientation descriptor. As the handcrafted feature descriptor in this case was constructed based on human experience, it did not represent the feature in a training process. Thus, it performs worse than current deep learning
(/licenses/by-nc-nd/4.0/).
1. Introduction
Video studies have attracted an increasing amount of attention from researchers in the computer vision community in recent years. Lately, research into topics such as object tracking [1–3], gait recognition [4,5], and activity recognition [6–8] have achieved competitive results and demonstrated promise for the future.
医学英语多模态语料库系统构建以及应用

医学英语多模态语料库系统构建以及应用作者:魏微来源:《微型电脑应用》2020年第02期摘要:针对医学英语词汇多,更新快,教学方式多样等特点,以Elan为工具,结合MDA理论,设计了医学英语多模态语料库系统,并分析了其应用。
研究表明基于Elan的医学英语多模态语料库具有强大的词汇功能,能够展现真实客观的语料信息,可以为词汇教学、听说教学、阅读教学等医学英语教学提供辅助和支撑可以有效提升医学英语教学质量。
关键词:医学英语; 多模态语料库; Elan; MDA理论中图分类号: G642 ; ; ;文献标志码: AConstruction and Application of Medical English Multimodal Corpus SystemWEI Wei(Medical Language and Culture Research Center, Xi'an Medical University, Xi'an 710021)Abstract: The medical English has its features such as large vocabulary volume, fast up-dating and multi-method in teaching. With Elan as the tool and MDA as the theory, this paper constructs a multimodal corpus system of medical English, and analyzes its application. The research shows that the Elan based multimodal corpus of medical English has a powerful vocabularyfunction, can display real and objective corpus information, and can provide assistance and support for medical English teaching, such as vocabulary teaching, listening and speaking teaching, reading teaching and so on, and effectively improve the quality of medical English teaching.Key words: Medical English; Multimodal corpus; Elan; MDA theory0 引言近年来,全球化程度日渐加深,医学英语重要性日渐增加,医学英语教学的比重日渐提升。
OptiStruct_Optimization
• Shape: is an automated way to modify the structure shape based on a predefined
shape variables to find the optimal shape.
• Size: is an automated way to modify the structure parameters (Thickness, 1D
Copyright © 2008 Altair Engineering, Inc. All rights reserved.
Day 1 Agenda
• • • Introduction Structural Optimization Concepts OptiStruct Features: FEA Solver and Optimizer
•
• • • •
Exercise 5.4: Creating Shapes
Exercise 5.5: Pre-processing the Shape Optimization of a Channel Exercise 5.6: Shape Optimization of a Rail Joint Exercise 5.7: Shape optimization of a 3-D bracket model using Free-Shape method
•
Shape Optimization Concepts (Morphing based and Free Shape)
• •
• • •
Exercise 5.1: Basics of Domains and Handles Exercise 5.2: Morph Volume Exercise 5.3: Mapping a mesh to a new geometry
脑监护仪
旋轉式電阻抗斷層攝影系統之電極設計Designing of the Moving Electrodes in Rotary Electrical ImpedanceTomography System1徐鳳明2尤芳銘 1黃振寧1*鍾鴻源1Feng-Ming Hsu 2Fang-Ming Yu 1Cheng-Ning Huang 1Hung-Yuan Chung*1國立中央大學電機工程學系Department of Electrical Engineering, National Central University1* Corresponding authorE-mail: hychung@.tw2聖約翰科技大學資訊工程系Department of computer science and information Engineering,St. John’s University摘要阻抗影像的空間解析度(spatial resolution)和分辨率(distinguishability)是判斷EIT測量系統成像品質的重要指標,電阻抗斷層攝影系統中我們所採用的系統架構、電流驅動模式、定電流源的穩定度與重建演算法皆會影響阻抗成像的品質。
利用旋轉式電極的概念,我們可以增加邊界電壓的獨立資料量數倍,使得影像解析度不佳的問題獲得大幅的改善。
然而,EIT測量系統易受雜訊干擾與金屬電極氧化的影響,引起邊界電壓資料精確度不佳、可靠性低,導致成像失敗,而影響系統精確度不佳的主要原因為與待測區域接觸的感測電極。
本文將提出新型的複合式電極結構,可有效增加電壓電極之間的間距與電流電極的接觸面積,提高訊號雜訊比(SNR),與成像分辨率,由實驗獲得的成像結果可以驗證,旋轉式電阻抗斷層攝影系統的精確度已獲得更進ㄧ步的改善。
關鍵字: 旋轉式電阻抗斷層攝影系統、空間解析度、分辨率、複合式電極結構AbstractSpatial resolution and distinguishability is an important index to estimate the image quality of electrical impedance tomography system. The factors affecting the quality of EIT image include the system structure, the constant current source, the reconstructor algorithm, and current driven pattern. By Utilizing the rotary electrode, REIT can increase the boundary voltage and make the spatial resolution of the impedance image better. However, The accuracy of the measurement data is easily influenced by the noise and the oxidization of the metal electrode. These noises lead to failure of the image reconstruction. Because the main reason for impairing the system accuracy is caused by the structure of the electrode array. In this paper we will propose a new composed-electrode structure. Increasing the interval between voltage-collection electrodes and expanding the area of the current-driven electrodes can improve the signal-to-noise ratio and the distinguishability effectively. According to the experimental results, the image quality of REIT become much better.Keywords: rotary electrical impedance tomography (REIT), spatial resolution, distinguishability ,composed-electrode structure1.EIT簡介 (Introduction)1976年美國Wisconsin Madison大學的Swanson教授首先提出胸剖面(frontal plane)阻抗成像技術,因而引起各國學者的廣泛興趣,開始著手研究人體的電阻抗成像,作為醫學診斷的輔助工具。
学霸五星英语人教版第二单元作文
学霸五星英语人教版第二单元作文Education has always been a fundamental aspect of human society, shaping the minds and futures of individuals. In the realm of English language learning, the Student Star English textbook series published by People's Education Press stands out as a comprehensive and engaging resource. Particularly, the second unit of this series offers a wealth of insights and opportunities for students to hone their linguistic skills.At the heart of the Student Star English curriculum lies a focus on holistic development. The second unit delves into a range of topics that not only enhance language proficiency but also foster critical thinking and cultural awareness. From exploring the intricacies of interpersonal relationships to delving into the fascinating realms of science and technology, the unit presents a diverse array of subject matter that caters to the diverse interests and learning needs of students.One of the standout features of the Student Star English second unit is its emphasis on practical language application. Rather than relyingsolely on rote memorization of vocabulary and grammar rules, the unit encourages students to engage in real-world scenarios and use their language skills in meaningful contexts. Through interactive activities, role-playing exercises, and engaging discussions, students are empowered to apply their knowledge in authentic situations, preparing them for the challenges they may face in their academic and professional pursuits.Moreover, the unit's integration of multimedia resources further enhances the learning experience. Audiovisual materials, such as podcasts, videos, and interactive simulations, bring the content to life, making it more accessible and engaging for students. This multimodal approach not only caters to different learning styles but also fosters a deeper understanding of the subject matter, as students are able to connect the theoretical concepts with practical applications.One of the key strengths of the Student Star English second unit lies in its emphasis on cultural awareness and global perspectives. By exploring topics that transcend geographical boundaries, the unit encourages students to develop a broader understanding of diverse cultures, customs, and worldviews. This exposure not only enhances their language skills but also cultivates empathy, respect, and a more nuanced understanding of the interconnected world in which we live.Furthermore, the unit's assessment strategies go beyond the traditional paper-and-pencil tests, incorporating a range of evaluation methods that cater to different learning styles and strengths. From project-based assignments to oral presentations and portfolio assessments, students are given the opportunity to showcase their knowledge and skills in a multifaceted manner, allowing for a more comprehensive evaluation of their progress and growth.Perhaps one of the most remarkable aspects of the Student Star English second unit is its ability to foster a sense of community and collaboration among students. Through group-based activities and peer-to-peer learning opportunities, students are encouraged to engage with their classmates, share ideas, and learn from one another. This collaborative approach not only enhances language proficiency but also develops crucial interpersonal skills, such as communication, problem-solving, and teamwork, which are highly valued in the 21st-century job market.In addition to the unit's academic rigor, it also places a strong emphasis on the holistic development of students. By incorporating elements of social-emotional learning, the curriculum helps students navigate the complexities of adolescence, fostering self-awareness, emotional regulation, and the development of positive relationships. This holistic approach ensures that students not only excelacademically but also cultivate the necessary life skills to thrive in the ever-changing landscape of the modern world.As students delve into the second unit of the Student Star English textbook series, they embark on a transformative journey that transcends the boundaries of language learning. Through its comprehensive curriculum, engaging pedagogical strategies, and focus on holistic development, the unit equips students with the knowledge, skills, and mindset to become confident, adaptable, and globally-minded individuals. Whether they aspire to pursue higher education, embark on international careers, or simply enrich their personal lives, the lessons and experiences gained from this unit will undoubtedly serve as a solid foundation for their future success.In conclusion, the Student Star English second unit is a remarkable educational resource that goes beyond the confines of traditional language instruction. By seamlessly integrating academic rigor, practical application, cultural awareness, and holistic development, it empowers students to become not only proficient in English but also well-rounded, adaptable, and engaged global citizens. As students navigate this transformative journey, they will undoubtedly emerge as the next generation of leaders, innovators, and change-makers, poised to make a meaningful impact on the world around them.。
很好的外文翻译
英文翻译1外文原文出处:EngineeringStructures 30(2008)1002–1013弹性位移要求:系统参数的不确定性与地型数据的随机性摘要:本文的主要内容是:量化成比例的源于(1)广泛承认记录的变化性,(2)内在随机性的系统参数,弹性的总位移比率模式主导结构相当名义上决定横向强度。
随机系统参数处理均为:系统正常独立考虑横向屈服强度和系统粘性阻尼比。
Monte Carlo模拟技术是一套选自从20规模地震数据中总结出来被广泛用来取代SDOF系统的数据模拟系统。
各向主要倾向的措施是,变化性的分散系数,被认为是这位移的数率。
被普遍认为,分散的数率在位移比率的准则下被认为随机性的系统参数要远小于人为记录数据时的多变性。
估计这种被报道的复表面重力波的分解的以后很有可能实施于性能抗震设计新兴概率和评价方法。
据还表明,在所产生的分散位移比率的可变性参数低于本身内在分散系统参数只有在极少数的情况或短时间内发生。
1 介绍最近推出的关于使用标准性能的抗震设计方法的是位移法,而不是强度的基本要求的参数设计,评定和修复的结构法。
此外,目前的建议,评估现有的结构基本建立简化分析方法,其中SDOF系统是通过估算全球弹性位移需求结构。
例如这些例子ATC - 40准则[1],FEMA- 273[2],FEMA- 356[3]。
在这些资源文件,全球需求弹性位移的结构计算考虑到之间的关系,最大的需求弹性位移的非线性SDOF系统和最大弹性位移需求的线弹性SDOF系统。
因此,最近的一项新关注的近似方法来计算合理的估计数最多要求位移弹性SDOF系统。
此外,以概率为基础的抗震设计/评估方法正在获得越来越多的引起地震工程社区面上研究人员和设计师的关注。
因此,据全面的资料估计,预期平均值(即主要倾向措施)的最大弹性位移的模式广泛的占主导地位的结构和相关的变化性(即分散)在此参数是非常重要的有效实施这种概率为基础的方法。
第一份研究调查报告说,最大变形的弹性和弹性系统之间的关系,续集中提到的作为弹性位移比率 DRin ,指导人Veletsos et al. [4]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
TheEvaluationofAdaptableMultimodalSystemOutputsErinMariePanttajaMediaLabEuropeDublin,Ireland{erin,reitter}@mle.media.mit.eduDavidReitterMediaLabEuropeDublin,IrelandFredCumminsUniversityCollegeDublinDublin,Irelandfred.cummins@ucd.ie
AbstractAdaptablemultimodalsystemsaredifficulttotest.Wepresentamethodologyforevaluatingparallelmultimodaloutputwhichisgeneratedinresponsetoaspecificsetofuser,device,andsituationcon-straints.Wefocusonthegenerationofmultiplevariantsofuserinterfacesforsmall-screengraphicaldeviceswithnaturallanguagevoiceoutput,withinasystemwetermUIontheFly.Ourmethodologytestsanysystemthatrankspotentialoutputvariantsusingafitnessfunction.
1IntroductionCoordinatedmultimodality,adaptivity,andautomatically-generatedinterfacesarerelativelynewparadigmsinhumancomputerinterfacedesign.Ratherthansequentiallyemployingmodestoconveyinformationtotheuser,severalmodesareusedredundantlyorcomplementarily.Sound-enabledinterfacesareasimpleexampleforcoordinatedmultimodality,voice-enabledSALT1
documentsanother.Someresearchprototypesrepresentdynamicallygenerateduserinterfaces,whichcanbeadaptedtotheuser’sspecialneedsinagivensituation,forexample,iftheusercannotpaymuchattentiontothescreenwhileperformingmaintenanceoperationsordrivingacar.Naturallanguageplaysacentralroleinsuchinterfaces,notonlyinvoiceoutput,butalsoinvisualuserinterfacesadaptedtodeviceslikemobilephonesthathaveonlylimitedinputoptions.Theseadvancedsystemsarenotoriouslydifficulttotest,astheychangetheirbehaviordynamicallyandunpredictably.Assystemsbegintofollownewinterfaceparadigms,evaluationmetricswillneedtotakeintoconsiderationadditionallearningtimeonthepartoftheuser.Inaddition,testsystemsareof-tenlimitedintheirfunctionality,andmaydependontheimplementationofacompletedialoguesys-temthatmaynotbeavailableduringtesting.Wecircumventsomeoftheseproblemsbyfocusingon
1SpeechApplicationLanguageTags,www.saltforum.org
asystemwithanadaptablesituationmodelwhichremainsfixedduringeachtestcase.Therearemanydifferentmeasurementsforde-scribinga‘good’system.Doesitfunctionwithinthespecificationofitsdesigndocument?Canitbeusedbyitstargetgroup?Isitaccessibletothehardofhearing?Totheblind?Tothosewithmotorim-pairments?Evenaccessibilityishardtodefine.Asystemmaybetechnicallyaccessiblewithoutbeingusable.Doesitallowuserstocompletethetaskstheysetouttocomplete?Arethesetasksusefulintheirdailylives?Dotheyenjoythesystem?Dotheytrustthesystem?Inourexamplecase,thesystemperformstheau-tomated,parameterizablegenerationofauserin-terfacewithavisualcomponentandtext-to-speechvoiceoutputforsendingemail(seeFigure1).Thesystemreliesonagrammarofhierarchicalcompo-nentstodefinethedisplay.Thegenerationalgo-rithmandthecomponentsensurethattheoutputisconsistentacrossmultipledevices.Thedesignchoicesthatthealgorithmmakesarealsobasedonthepredictionofutilityandcognitiveloadthatapossibleoutputvariantwillhave.WedescribetheunderlyingformalisminSection4.Inwhatfollows,wewillpresentageneralmethodologyfortheevaluationofmultimodalsys-temoutputswhichwebelieveiscapableofpoten-tialapplicationtoawidevarietyofevaluationprob-lems.Weillustratethemethodasitiscurrentlybeingappliedtoaspecificapplication(anemailclient),alongwithaconcreteformalismwhicheas-ilysupportsthemethodbythegenerationofmulti-pleoutputvariants.Fullevaluationresultswillbepresentedattheworkshop.
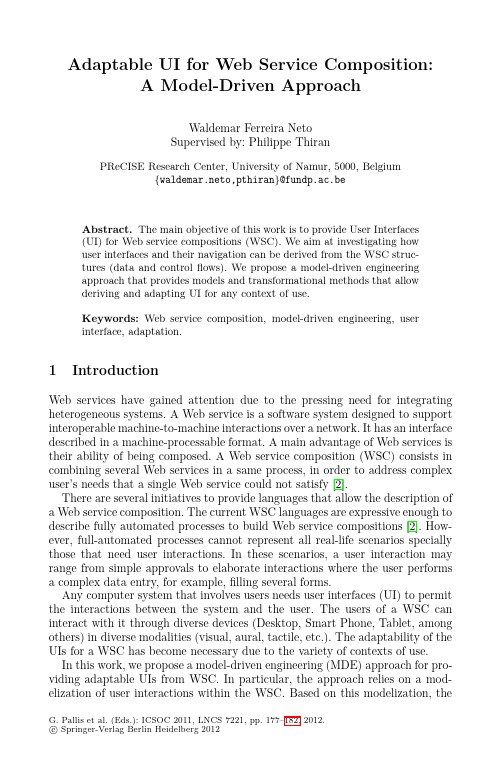
2RecentworkItcantakeaverylongtime,ontheorderofyears,tofindoutifuserswillreallyuseasystemorac-ceptanewparadigm.Thisacceptancemaybede-pendenton(orimpededby)otherfactors(e.g.is-sueswithdocumentation,trust,advertising,cost...)(ReiterandDale,2000).Itisnotsurprisingthat(a)(b)(c)Figure1:a)Voice:“SendtheemailregardingIrishWeather?”b)Voice:“Sendtheemail?”c)Voice:“DoyouwanttosendtheemailtoMickregardingIrishWeather?”
auserwhohasyearsofexperienceusingatwo-dimensionalgraphicaluserinterfacewithakey-boardandamousewillseldomfindthatanovelinterfacewith3Dgraphicsandcoordinatednaturallanguageinteractionisabetterwaytoinputcom-mandsanddata,atleastatfirst.Inmanyprojectsrelatedtonaturallanguageormultimodaldialogue,evaluationisignoredalto-gether.Experimentswithhumanusersareoftenusedmainlyaspartofthesystemdesignprocess.(asinFeinerandMcKeown,1988).Manyofthesesystemsareresearchprototypesthatapplytoalim-iteddomainoralimitednumberofinterestingtestcases.Auser-basedevaluationisonlyfeasibleoncethesystemissufficientlystabletoallowuserstoac-cessitovertime.Whilethisisaneventualgoal,preliminaryevaluationwillpreventwastingtimeonsubstandarduserinterfaces.Whenitcomestotheevaluationitself,thereareavarietyofquantitativemeasures(timetoperform,accuracy,percentagreementofassessments)andqualitativeones(userperceptionsofutility,easeofuse,andnaturalness).(MayburyandWahlster,1998)Qualitativemeasuresalsoincludethestudyofthink-aloudprotocolsandobservationofusers.Thesetechniquesobviouslyrequireastableandevenrobustsystemtobeavailable.Atearlierdesignstages,acognitivewalk-throughoraheuristiceval-uationagainstrules-of-thumb(Cocktonetal.,2002)canprovideguidance.Evaluationbasedonusermodelsemploysasim-ulateduserthatbehavesunder,ideally,thesamelimitationsandstrategiesthatahumanuserwoulddemonstrate.GOMS(Goals,Operators,MethodsandSelectionrules,Kieras,2002)isamethodologythatallowstheformalization,evenbeforeasystemcanbeused,ofelementsofauserinterfaceintermsoftheknowledgerequiredfromauser.AGOMSmodelseemsinappropriateforanadaptablesystemthatmaydynamicallychangetheoperatorsavail-abletotheuser.Adaptivityinvolvesaconstantlychangingsystemmodel.Itsbenefitsbecomeclearonlyinthecontextofauserundercertainexternallimitations-suchasthoseimposedbyparallel,un-relatedtaskslikedrivingacarorparticipatinginaconversation.InSUPPLE,GajosandWeld(2004)presentasystemthatadaptablygeneratesagraphicaluserin-terface.Theydiscussanumberofdifferentevalua-tionstotheirsystem.Efficiencytestsofthegener-ationalgorithmshowtheeffectofcertainproposedoptimizations.GajosandWeldproposejudgingthequalityoftheuserinterfacesbycomparingthesys-tem’sdecisionstothosemadebyhumandesign-ersundersimilarconstraintsregardingtheavailableuserinterfacewidgets.Ingeneral,subjectivetestingasksauserorde-signerfortheirimpressionandjudgmentofasys-tem.ReiterandDale(2000)discusshavingexpertsevaluatebothautomatically-generatedandhand-generatedexamples.InComfort,Knightetal.(2002)evaluatewearableUIsonthebasesofemo-tion,attachment,harm,perceivedchange,move-ment,andanxiety.Thissetofcriteriawasgeneratedbymultidimensionalscaling,andcouldbeadaptedforusewithothermobile(butnotnecessarilywear-