基于网络RTK的无验潮水库水下地形测量
GDCORS在水下地形测量中的应用

GDCORS在水下地形测量中的应用摘要:本文主要对GDCORS系统进行了简单的介绍,阐述了虚拟参考站VRS 测量技术及水深测量系统,以及两者相结合的测量原理,笔者结合实际,重点对利用GDCORS系统VRS测量技术结合测深仪实施水下地形测量的步骤和优点等进行了论述。
关键词:GDCORS;VRS;测深仪;水下地形测量Abstract: this paper mainly to the GDCORS system of simple, the author introduces virtual reference VRS measurement technology and stand water depth measuring system, and the combination of the measuring principle, the author combined with practice, focus on GDCORS VRS measuring system using technology in combination with sounders underwater topography measurement of the implementation steps and advantages are discussed.Key words: GDCORS; VRS; Depth-measuring apparatus; Underwater topography measurement前言在港口和航道建设中,水下地形测量工作是基础,它能够提高港口和航道的航运能力及安全等。
水下地形测量就是利用测量仪器将水下地点的三维坐标确定下来,传统水下地形测量主要是用经纬仪、全站仪、水准仪等一些仪器来进行。
传统的测量方式工序繁琐,工作人员多,工作强度大,效率低,并且难以保证精度。
随着电子技术的快速发展,GPS-RTK结合测深仪一度成为水下地形测量的重要工具,随着CORS系统的建成使用,VRS测量技术结合测深仪实施水下地形测量逐渐成为新宠。
RTK原理及注意事项

RTK数据链示意图
RTK的组成部分
1、基准站部分 接收GPS信号, 包括:导航电文信号;提供差分坐标,星 历等信息
2、差分传送部分 将基准站的差分数据传输给移动站包括测站坐标、观测值、 卫星跟踪状态等数据
3、移动站部分 接收GPS信号及基准站差分信号,并进行解算,得到实时的 高精度定位结果
4、手簿终端控制器 内置RTK测量软件,可设置基准站,移动站的工作参数, 显示移动站实时坐标成果,计算测量参数,进行辅助线路 设计等功能。
• 5)基准站应选择在易于保存的地方,以便日后的应用。 • 6)如果使用电台传送差分,由于电台信号传播属于直线
传播,所以为了数据传输距离更远,基准站应该选择在地 势比较高的测点上。 • 7)如果使用手机网络传送差分,应该保证基准站和移动 站都要有较强的信号。
RTK注意事项
• 8)移动站应该保持与基站有效距离;电台作业应尽量小 于10千米范围,手机网络通讯时,一般要求小于30千米范 围
RTK简介
RTK(Real Time Kinematic)---实时动态 载波相位差分定位技术。
RTK测量系统是GPS测量技术与数据传输技术构成 的组合系统,RTK定位技术就是基于载波相位观测的实时 动态差分定位技术,它能够实时实实地提供测站点在指定 坐标系中的三维定位结果,并达到厘米级精度。 RTK是高精度GPS测量定位最常用的技术,是公司产品的 最主要的组成部分。
1、测图根点、 地形测图、 工程放样
一人操作 精度均匀 工作效率高 实时显示 位置信息 导航信息
应用范围
2、无验潮测水深 水下地形测量随着
RTK技术的出现,使得 水上测量采用GPS无验 潮测量方式工作成为 可能。采用此种方式 不仅可以避免定位系 统和测深系统之间的 延迟误差,而且由于 无验潮,使得内业处 理更简单、方便 。
_GPS-RTK配合测深仪在水下测量中的应用

( 3) 流动站在数据采集过程中,按照卫星状况 及数据链的通讯质量,出现异常及时调整和修正。 根据实时模拟信号显示状况,当遇到水草部分,测 出水深为伪值时,这时进行人工测定水深值,并及 时在水深文件里进行修正,确保水深数据采集的质 量。 3. 3. 3 数据处理
1 GPS-RTK 及测深仪工作的基本原理简介
1. 1 GPS-RTK 技术
常规的 GPS 测量如静态 GPS、快速静态 GPS 和 动态 GPS 测量都是先测量事后再进行解算才能得 到所测点位的坐标值,而 RTK( Real Time Kinematic) 载波相位实时差分技术能够实时地提供测站点 在指定坐标系中的三维坐标成果,定位精度可达到 厘米级。GPS-RTK 测量是全球卫星导航定位技术 与数据通信技术相结合的一种技术,主要由基准站 和流动站两部分构成,基准站通过接受数据链将其 观测值和测站坐标信息一起传送给流动站。流动 站通过数 据 链 接 收 来 自 基 准 站 的 数 据,同 时 采 集 GPS 观测数据,并在系统内组成差分观测值进行实 时处理 ( 李征航等,2005; 田雪冬等,2009; 周忠 谟 等,1997) 。随着 GPS 技术的不断发展,利用多基站 网络 RTK 技术建立的连续运行卫星定位服务综合 系统( Continuous Operational Reference System) 简称 CORS 系统在全国多个省市均已建立应用,该系统 由基准站网、数据处理中心、数据传输系统、定位导
图上 1. 0
水深范围 /m
H≤20
深度误差限值 m
± 0. 2
参数的设置: 将该测区的坐标系统转换参数输 入测深仪及 GPS 接收机中。
GPS-RTK与测深技术在近海井场水下地形测量中的应用
庚
( 解放 军 9 2 9 4 1 部 队 葫 芦 岛 1 2 5 0 0 1 )
摘
要
主要介绍 了利用 GP S - RT K 与测深技 术测量 水下 地形 的基 本原理 和作 业步 骤。通 过对渤 海湾 某海 区井场 进行 测量 , 说 明 GP S RTK; 测深仪 ;水下地形测 量
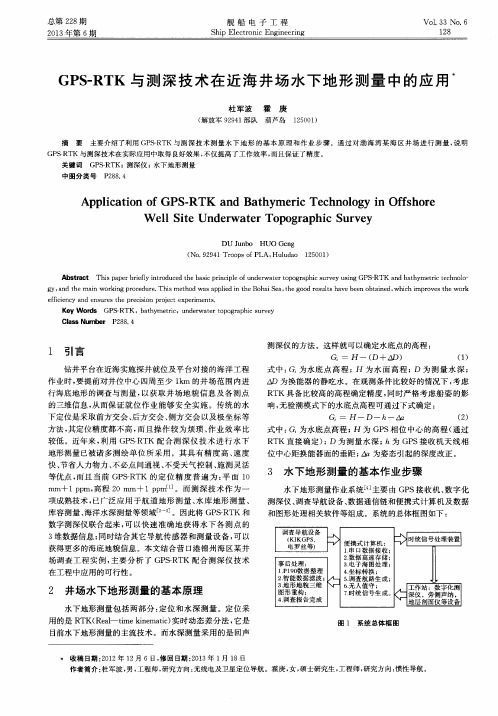
3 水 下地形测量的基本作业步骤
水下地形测 量作 业系统 ] 主要 由 GP S接 收机 、 数字化
测深仪 、 调查导航设备 、 数 据通 信链 和便携式计算 机及数据
和图形处理 相关 软件等组成 。系统的总体框 图如下 :
库 容测 量、 海洋水深测量等领域 _ 2 ] 。因此将 G P S - RT K和 数 字测 深仪 联合 起来 , 可 以快 速准 确地 获得水 下各测 点 的 3 维数据信息 ; 同时结合其它导 航传感 器和测 量设备 , 可 以 获得更 多的海底 地貌信息 。本文结合营 口港锦 州海 区某井 场调查 工程 实例 , 主要 分析 了 GP S - R T K 配合 测深仪 技术 在工程中应用的可行性 。
W e l l S i t e Und e r wa t e r To po g r a p hi c S ur v e y
DU J u n b o HUO Ge ng
( No . 9 2 9 41 Tr oo ps o f PLA , Hu l u d a o 1 2 5 0 0 1 )
G — H — D — h一 ( 2 )
方法 , 其定位精度都不 高 , 而且操 作较 为烦琐 、 作Байду номын сангаас业效 率 比
较低 。近年来 , 利用 G P S - R T K 配合测 深仪 技 术进 行 水下 地形测量 已被诸 多测绘 单位 所采用 。其具 有精度 高 、 速度 快、 节省人力物力 、 不 必点间通视 、 不受 天气 控制 、 施测灵活 等优点 , 而且 当前 GP S - R TK 的定 位 精度 普 遍 为 : 平面 1 O mm+1 p p m, 高程 2 0 1 T i m+1 p p 。而测 深技 术作 为一
RTK技术在水上测量中的应用

RTK技术在水上测量中的应用作者:张建欢唐波来源:《科技资讯》 2014年第7期张建欢唐波(广西八桂工程监理咨询有限公司广西南宁 530028)摘要:RTK是GPS测量技术中的一种新发展,在水上测量中广泛应用,本文将结合具体的水上测量工程实例,介绍这种新技术的特点、作业模式以及适用范围等,同时着重描述了RTK技术在水下地形测量或水上打桩定位中的应用,希望能对类似水上测量工程起借鉴作用。
关键词:RTK技术水上测量水下地形测量中图分类号:P228文献标识码:A文章编号:1672-3791(2014)03(a)-0000-001. 水上测量的特点进行水上测量包括的内容有水下地形测量和水上物体定位导航两种。
总结水上测量的特点主要有以下几点:(1)在水上测量过程中需要应用仪器的组合使用,并且需要通过间接测量的方式。
(2)水上测量与陆地测量方式不同,陆地上进行测量可以采用转点作业的方式,但是在水上测量使用的仪器无法进行固定和架设,特别是在大片是水域中,因此在水上测量工程中,其基准站到流动站单站测量距离通常较远。
(3)相比于陆地,在水上进行测量,相同精度更能实现,同时实时性要求高。
2. RTK技术在水上测量中的应用RTK是GPS技术中的一种,主要是通过差分GPS技术进行定位,是一种高效的定位技术,RTK是利用载波相位差技术,实时处理测站载波相位观测量的差分方法,将基准站采集到的载波相位发送给移动站,进行求差解算坐标。
在水域中进行测量工作,通常是对水下地形的高程进行测量,通过高程的数据可以为设计提供上下地貌图或断面图。
在水域的地带通常较为广阔,比如近水海域等。
在这些水域中如果用传统的测量方法是很难实现该地区的测量工作。
在宽阔的水域中是无法正常进行全站仪的使用的,同时在深水区,棱镜是无法正常发挥其作用的。
因此在这些区域可以使用RTK技术进行测量,这样不仅节省了时间,同时还保证了测量精度。
2.1水下地形测量本工程为某一旅游港口,位于一座山附近,该山四周环水,水域的宽度约有1000m,同时水深最大的地方可以达到150m,为了能在这里进行该旅游港口的建设,施工前,采用RTK技术对水下的地形进行测量。
常规RTK定位技术与多基准站RTK_百度文库解析

无验潮法在航道测量中的应用□广东正方圆工程咨询有限公司霍炽汉摘要:介绍无验潮水下地形测量方法在航道测量中的应用,分析了使用该方法的优劣性。
关键词:水下地形测量GPS RTK 无验潮1引言GPS RTK 最早应用于水上测量时,方法仍同DGPS 一样,用来获得平面定位数据,只是定位精度提高了很多。
很长一段时间GPS 只是作为确定平面位置的方法。
近几年随着RTK 的普及和水上导航测量软件的成熟,一种新型的水上测量方式得到推广,并渐渐成为日后发展的趋势,这就是无验潮水下地形测量方法。
本文结合实践经验,介绍无验潮水下地形测量方法应用,以供参考。
2无验潮水下地形测量基本原理当前GPS 实时动态相位差分(RTK )的定位精度普遍为:平面10mm+1ppm,高程20mm+1ppm。
无验潮水下地形测量的基本原理是利用RTK 测得的GPS 天线精确的三维坐标(X ,Y ,H ),其中X 、Y 确定定位点的平面位置,RTK 高程结合由测深仪同步测得的水深换算出同一平面位置上的水下泥面的高程或水深值,从而获得水下地形数据,见图1。
用户可以测得的数据:h :GPS 天线到水面的高度H :GPS 接收机测得的高程(水准高)S :测深仪测得的水面到水底的深度用户需要得到的最终数据:B :水底到水准面的距离即通常说的水深值C :水准面到水底的距离即通常说的水底高程由图1得出:C=(H–h –S ;B=S –(H–h3航道水深测量的应用水深测量的作业系统主要由GPS 接收机、数字化测深仪、数据通信链和便携式计算机及相关软件等组成。
测量作业分三步来进行,即测前的准备、外业的数据采集测量作业和数据的后处理形成成果输出。
在东江中游航道测量中,为满足航道整治施工图使用的需要,根据项目设计要求,需对该水道进行1∶2000水下地形图测量。
测区内早期施测的I 、II 级导线点和IV 等水准点,可以作为1∶2000水下地形图测绘控制点。
作业采用的仪器设备软件有:法国THALES Navigation 公司生产的双频R TK Z -MAX 接收机2台套,其中1台作为岸台(基准站),1台为船台(流动站),HY1600数字化测深仪1台,便携式计算机1台,中海达海洋导航测量成图软件1套和南方CASS6.0成图软件1套。
基于GNSSS技术模式下的无验潮水下地形测量方法研究

基于GNSSS技术模式下的无验潮水下地形测量方法研究作者:马耀昌樊小涛惠燕莉来源:《地球》2013年第01期[摘要]水库作为人类蓄水发电、灌溉和防洪调度等的重要设施,发挥着越来越大的作用,并取得了巨大的社会效益和经济效益。
但水库库容和淤积量是水库调度的重要参数,其精度直接影响到水库的防洪安全与蓄水兴利。
随着现代测控技术的迅速发展,将基于GNSSS技术模式下的无验潮水下地形测量方法应用到水利电力和防洪调度值得值得研究和推广。
[关键字] GNSS 无验潮水库[中图分类号] TU198+.1 [文献码] B [文章编号] 1000-405X(2013)-1-120-20引言水下地形测量方法一般用GNSS作为测点定位,回声测深仪测深,根据瞬时水位的高程来反算河底点高程的基本模式。
对瞬时水位资料获取方式而言,其资料大多来自于设立在岸边的水位站。
在实际测量中,往往水位站很难设立或者水位站的数据不能很好地代表测量区域的水位,则常规的水下地形测量难以准确地实施。
随着GNSS实时差分技术(RTK)的日益成熟,能够在动态环境下,获得厘米级甚至毫米级的水平定位精度和厘米级的高程定位精度[1]。
这使得人们对GNSS 的应用不仅局限于平面定位方面,而且深入到高程领域。
因此提出了一种无验潮模式下的水下地形测量方法,该法不需要传统水下地形测量的潮水位资料,实施起来简单方便,且测量精度优于传统测量模式。
1 基本工作原理GNSS差分测量可以非常精确地测定2点之间的相对高差,小区域范围内,通过该高差便可反算出流动站GNSS 相位中心的高程,该高程同基准站具有相同的高程基准面。
假设参考站GNSS天线离已知点高度为ha1,参考站GNSS天线的大地高和正常高分别为Hg1 和Hm1;已知点的正常高为Ho1;高程异常值为Δh;流动台GNSS天线到水面的高度为ha2,流动台GNSS天线的大地高和正常高分别为Hg2和Hm2,测深仪换能器底部的瞬时高程ho2,测深仪换能器底部到海底水深为hi;测量的海底正常高为H = ho2 - hi。
测深仪与GPS组合在水下地形测量中的应用

852020.12|3水下地形测量3.1准备工作水下测量前,对基准站、流动站仪器进行初始化,得到固定解后开始观测。
以测回间平面坐标误差小于40m m 、大地高差小于40m m 为标准,取3次测量均值作为最终观测结果。
根据《水运工程测量规范》对测深定位点误差限值、深度误差限制进行校对(如表1所示)。
校正G P S 主机及测深仪后,将测区坐标系统转换参数输入测深仪及G P S 接收机内。
图2 测深仪与GPS天线安装位置示意图测深仪换能器保持同一轴线,R T K接收机与测深仪数据按等时间间差调整测量船航向。
由于本工程部分区域存在礁石,导致水下地方法,并及时输入水深文件中修正,确保水下测量数据准确性、业地形图软件中进行建模,剔除异常测点数据后生成水下地形图1m m范围内水深点深度比互差应小于0.4m,为校核、验证测深查线,共计检查266点,发现有4点差值超过粗差,粗差率为1.5%要求。
制:①将测深线文件导入测深仪内,及时调整测量船航向,确保持轴线统一;③船体横摇、纵倾时,对换能器瞬时高程进行多,选择风力小于4级,测量船行驶速度小于0.9m/s,浪高大于0.4m[1]何广源,吴迪军,李剑坤.GPS无验潮多波束水下地形测量技术的分析与应用[J].地理空间信息,2013(02);[2]杨玉光.关于水下地形测量中GPS-RTK技术的应用探讨[J].江西测绘,2013(03);[3]李峰.浅析水下地形测量技术[J].中国新技术新产品,2015(24)。
作者简介周尚伟(1986-),男,福建福鼎人,大学本科,工程师,现主要从事工程变形监测和86|CHINA HOUSING FACILITIES。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于网络 RTK的无验潮水库水下地形测
量
摘要:本文主要介绍了基于网络RTK的无验潮水下地形测量原理,并详细
介绍了无验潮水下地形测量的作业流程,最后通过主检测线比对结果确定了无验
潮水下地形测量作业方式的可行性。
关键词:网络RTK、水下地形、无验潮、连续运行参考站
水库是拦洪蓄水和调节水流的水利工程建筑物。
水库发挥着防洪、蓄水、灌溉、水土保持、改善环境等多种功能,在促进区域经济社会发展和维持生态平衡
中发挥着重要作用,具有重要的社会、经济和生态意义。
由于上游来水携带泥沙、水库护坡坍塌等因素使水库淤积,造成水库库容减少,水情测报不准,入库出库
流量不符,给水库的科学管理、安全运营带来了诸多隐患,因此,开展水库水下
地形测绘,获取水库水下地形基础地理信息数据,实现库区水上水下基础地理信
息数据的无缝衔接,可以为水库科学管理、安全运营、水资源的高效利用、水环
境保护、防洪排涝及重大水利工程建设提供数据支撑。
水深测量过程中受到涌浪、潮汐等因素的影响,实测的水深数据需要经过吃
水改正、声速改正、姿态改正和潮位改正后才能得到基于某一基准面的水深数据。
传统水深测量采用人工或自动验潮方法直接获取水位,严重制约了水深测量的效
率和精度。
随着卫星定位、计算机网络、数字通讯、气象分析等技术的快速发展,连续运行卫星定位参考站网系统(CORS)得到广泛应用,为无验潮水深测量提供
了技术支撑。
山东省卫星定位连续运行综合应用服务系统(SDCORS)在全省范围内建立
101个GNSS连续运行参考站,构成全省新一代网络化的大地基准和空间数据采集
服务系统。
SDCORS实时定位的内符合精度可以达到平面0.020m,高程0.030m
的精度,实时定位外符合精度可以达到平面0.030m,高程0.080的精度[1],定位精度满足无验潮水深测量的技术要求。
一、无验潮水下地形测量原理
网络RTK可实时获取厘米级的三维坐标,但其获取的高程是基于参考椭球面的大地高,而高程系统一般采用基于似大地水准面的正常高系统,将实时获取的WGS-84大地高经过似大地水准面精化转化为1985国家高程而不需要人工验潮对水深数据进行潮位改正,这种方法就是无验潮水下地形测绘。
具体原理如下图1.1所示:
图1.1 无验潮水深测量示意图
水底面相对于参考椭球面的高程为:
H
底=H
GPS-
a
-
b
-
d (1.1)
水底面相对于似大地水准面的高程为:
h=H
底-ξ= H
GPS-
a
-
b
-
d
-
ξ (1.2)
式中,H
GPS
可以通过RTK接收机经过CORS差分获得,a为GPS接收机到水面的垂直距离,b为测深换能器的吃水,ab均可通过现场测量获取,d可以通过测深仪获取,为测深仪测量的换能器至水底面的垂直距离,ξ为似大地水准面和参考椭球面之间的差值,即高程异常,可以通过似大地水准面精化获取。
二、无验潮水深测量过程
测试位置选择在山东省某水库,选用的设备有中海达HD-370单波束测深仪,中海达V90 GNSS接收机,Digibar Pro声速剖面仪等。
第一步,设备安装。
将测深仪固定安装在船舷上,保持测深仪安装杆近似垂
直状态,换能器吃水约1.0m左右,并通过前后缆拉紧固定,V90 GNSS接收机安
装于测深仪安装杆顶端,使两者处于同一垂线上,量取换能器吃水b和GPS接收
机天线至水面的距离a,如图1.2所示。
图1.2 设备安装示意图
第二步,设备调试。
GPS数据通过串口与测深仪COM口连接,测深换能器与
测深仪TX接口连接,连接其他外接设备,接通电源。
打开测量导航软件,设置
坐标系、中央经线和投影参数,进行记录设置(RTK固定解)、端口设置,在天
线改正设置中输入天线至水面的距离a。
加载测量范围,根据比例尺按照图上
1cm布设测线,调试GPS数据、水深信号是否正常,设置声波发射功率、增益和
脉宽等参数使测深信号清晰连续。
第三步,水深数据采集。
在测区附近采集声速剖面数据,按照布设的测线采
集水深数据,监视数据采集界面定位信号、测深信号是否正常。
第四步,数据处理。
加载水深原始数据,检查水深数据是否异常,剔除水深
假信号,进行声速改正和潮位改正,得到水底面基于参考椭球面的大地高,将数
据发送精化中心进行似大地水准面精化即可得到1985国家高程基准下的水下地
形数据。
第五步,数据比对。
检查线垂直主测线布设,检查线长度不小于主测线长度
的5%,主检比对时选取比对半径为5m,比对结果如表1.1所示,比对结果符合
规范要求。
三、结束语
本次利用网络RTK无验潮方法获得的水深数据经检验精度满足作业要求,精
度较高。
与传统水深测量相比,无验潮水深测量摒弃了传统水深测量对潮位观测
的依赖,可以直接获取水底面基于参考椭球面的大地高,不受距离和验潮站的影响,无需人工观测潮位,节省了成本;可以24h作业,提高了作业效率;消除了
船舶动吃水、涌浪等因素对水深的影响,避免了潮位观测误差对水深数据的影响。
因此,基于网络RTK的无验潮水深测量方法可在水深测量中广泛应用。
参考文献:
[1]张海平,高士民等,SDCORD系统测试与技术性能分析[J],全球定位系统,2013,38(3):61-63
[2]张国利,时小飞等,网络RTK支持下的无验潮水深测量方法及其应用[J],测绘通报,2016,(12):140-141
[3]余彬彬,周晓华等,有验潮海洋测量与无验潮海洋测量的精度比对分析[J],江西测绘,2015,(2):12-15
[4]李昱,阎成赟,基于JSCORS的无验潮水下地形测量研究[J],海洋测绘,2014,34(3):48-51
[5]何广源,吴迪军,李剑坤,GPS无验潮多波束水下地形测量技术的分析与
应用[J],地理空间信息,2013,11(2):155-159。