输电线路除冰机器人的设计(开题报告)
一种高压线除冰机器人的设计
一种高压线除冰机器人的设计设计了一款基于STC89C52单片机的高压线除冰机器人。
该机器人可通过蓝牙通讯、短信通信和自我检测完成在高压线上的行走、除冰和数据实时监测等功能。
通过实验室测试和调整,较好地实现了预期功能。
标签:机械除冰;光强检测;高压线路Abstract:A high-voltage deicing robot based on STC89C52 microcontroller is designed. The robot can perform the functions of walking,deicing and data real-time monitoring on high-voltage lines through Bluetooth communication,short message communication and self-detection. Through the laboratory test and adjustment,the expected function is well realized.Keywords:mechanical deicing;light intensity detection;high voltage line改革开放以来,我国的电力行业得到迅速发展,电网覆盖面积扩大,线路走廊穿越的地理环境更加复杂,输电线路冰灾事故更为频发。
严重的输电线路覆冰会导致杆塔倾斜、倒塌、断线,绝缘子闪络,而且线路不均匀覆冰和不同期脱冰还会引起导线舞动现象,这些情况会引发线路跳闸、供电中断等事故,给工农业生产和人民生活造成严重影响。
目前,国内外除冰方法有30余种,根据除冰机理可分为机械除冰法与热力融冰法两类。
机械除冰方法能耗较小,但是除冰效率低,而且一般需要人工参与;热力融冰较机械除冰速度快,安全性高,但实际应用中限制因素太多,不能广泛适用。
对于较为严重的导线覆冰一般以人工上线除冰最为有效,但人工除冰危险性很高且效率较低。
悬挂行走式高压线除冰越障机器人的设计

os I odr Of daapo rt wa f e i do ef zni n o nteh — o g, oo i a teqats f d.n re t n p r i e vo tn r f h oe eads w o i vl e arb t c hsh u i i p a g tg i t r c n h g h  ̄ wh h li o e h gd w l n dbre— raigs rpsdi tit tT ieeteh — o ae n e in cai a aal o rnte- n a e— a iga a i bek ooe se . h fcv i vlg ed—c gmehns r c b ft g n k n rr n ip nh s s i h g t f i i m e p e se h
Th sg f n e - li gBa re - r a n n sa l- u mo ni gRo o it eHih V l g n eDeino Ha g d wakn r ir b e k ga d Ob tce s r u t b t l h g . ot eLie a i n O a
No . v, 201 1
文 章 编 号 :10 — 6 3 (0 )0 — 2 — 3 0267 2 1 1 6020
悬挂行走式高压 线除冰越 障机器人 的设计
朱 健林 ,原 所 先 ,陈 陆淼 ,李建 军
输电线路除冰机器人关键技术综述
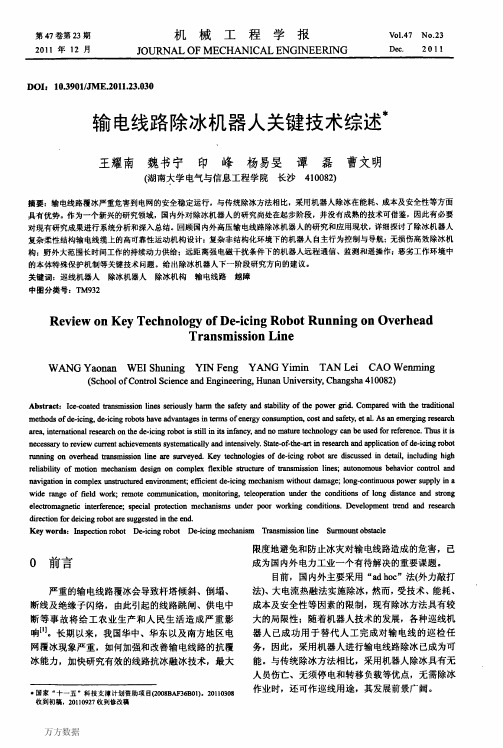
图7输电线路结构示意图
在设计控制系统时可采用如图8所示的分层控 制系统结构,即将总系统分为地面监控层(管理层)
和机器人本体控制层(规划层和执行层),分别实现
除冰机器人运动机构和除冰执行机构的伺服控制。
2011年12月
王耀南等:输电线路除冰机器人关键技术综述
33
杆塔等障碍,行走环境介于结构化和非结构化环境
性的影响,需要结合变结构控制、鲁棒控制、自适 应控制、神经网络、模糊控制或视觉伺服控制等先 进控制方法ll引,研究不确定条件下除冰机器人的精
确运动伺服控制问题。 除冰机器人运行过程中需要跨越的主要障碍 物包括:绝缘子、防振锤和引流跳线(图7)。这通常
输电线除冰机器人跟一般工业机器人不同,它 悬挂在柔性输电导线上,在运行过程中机器人的姿 态时刻发生着变化,呈现出多体系三维空间的复杂
需要解决如下技术问题。 2.2.1机器人运动学和动力学建模与分析
机器人运动学和动力学特性的准确建模是实
现机器人运动控制和导航避障的前提。除冰机器人
动力学建模需要重点考虑以下问题。 (1)必须考虑机器人与柔性作业环境间的非线
性动力学耦合特性。在进行除冰机器人动力学研究 时,必须考虑柔性作业环境对除冰机器人动力学特 性的影响,即大垂度柔性输电导线与相对刚性较大 的机器人之间的刚柔耦合特性。机器人本身是一个 多刚体动力学系统,而高压输电线路相邻两塔间的 万方数据
大的局限性;随着机器人技术的发展,各种巡线机
器人已成功用于替代人工完成对输电线的巡检任
网覆冰现象严重,如何加强和改善输电线路的抗覆 冰能力,加快研究有效的线路抗冰融冰技术,最大
务,因此,采用机器人进行输电线路除冰已成为可
能。与传统除冰方法相比,采用机器人除冰具有无 人员伤亡、无须停电和转移负载等优点,无需除冰
高压线除冰机器人本体结构设计

高压线除冰机器人本体结构设计作者:林坚磊刘文华陈雪侯智强宋赫来源:《宁波职业技术学院学报》2015年第02期摘要:针对高压输电线路的覆冰情况,提出了一种线路除冰机器人,该机器人由行走机构、越障机构、除冰工具、传动系统和摄像系统组成。
机器人利用固定在前端的除冰砂轮对覆冰切割,而后除冰锤实现180°半圆形往复运动对剩余覆冰进行反复敲打清除;驱动轮采用半圆型结构,适应一定范围的线径,为机器人提供了稳定性。
该机器人体积小,除冰效率高,可清除厚度为10~25 mm的覆冰。
关键词:高压线;机器人;除冰;结构设计中图分类号: TP 242 文献标志码: A 文章编号: 1671-2153(2015)02-0063-040 引言随着机器人技术的发展,采用除冰机器人除冰已成为现实。
国外的除冰机器人研发技术较为成熟,但除冰机器人体积较为笨重,成本较高[1-3],而国内的机器人研发处于实验室阶段。
针对高压输电线的覆冰情况,本文提出了一种高效彻底、便捷式除冰机器人,主要由传动机构、越障机构、除冰机构、行走机构和摄像机构组成,具有线上“行走”功能,能够在一条高压电线上自动越障完成各线塔间的除冰工作,还能检测线路破损状况。
1 除冰机器人的总体设计机器人是一个复杂的机电一体化系统,涉及到机械结构、自动控制、通信技术等多个领域,但机械结构是整个系统的基础,也是制约机器人实用化的最大障碍。
除冰机器人在输电线路上的高压线有一定坡度,能否平稳越过障碍物、彻底高效的除冰?本文设计了一种新型实用的高压输电线路除冰机器人,该机器人具有以下功能:(1)能在输电线上以预想速度平稳爬行;(2)具有上下坡越障功能;(3)具有防打滑功能;(4)行进速度与除冰速度保持相协调;(5)能够高效、彻底地除去输电线上的覆冰。
图1为除冰机器人的本体结构。
2 除冰机器人的机构设计2.1 传动机构的设计传动系统可以分为三条传动路线,如图2所示。
第一条:电机—花键轴—滑移齿轮—螺旋齿轮—皮带轮—除冰砂轮。
基于嵌入式系统的输电线路除冰机器人设计

基于嵌入式系统的输电线路除冰机器人设计
张春娜
【期刊名称】《集成电路应用》
【年(卷),期】2024(41)2
【摘要】阐述一种基于嵌入式系统的输电线路除冰破冰机器人,利用破冰锥的特殊结构进行除冰破冰。
此装置以嵌入式系统,通过物联网设计、3D建模和打印技术应用,能够确保高效除冰。
【总页数】2页(P398-399)
【作者】张春娜
【作者单位】三门峡职业技术学院
【正文语种】中文
【中图分类】TP242
【相关文献】
1.高压输电线路除冰机器人的除冰机构设计
2.输电线路除冰技术及除冰机器人设计
3.一种输电线路的智能多功能除冰机器人的设计与实现
4.输电线路防冰除冰机器人设计与仿真
5.基于模糊PID算法的输电线路除冰机器人智能控制系统设计
因版权原因,仅展示原文概要,查看原文内容请购买。
输电线除冰机 毕业设计

摘要机械式输电线除冰技术是利用传统的工具通过机构运动方式达到输电线除冰的目的。
由于机械式输电线除冰技术除冰效率高,操作简单,因此受到很多国家的重视,在国内也引起了极高的重视,尤其是各大院校和科研院所。
本文从输电线覆冰原理及其危害综合说明了输电线覆冰对人们生产生活的影响,提出了一种新的输电线除冰解决方案。
研发一款新式输电线除冰机。
本输电线除冰机主要由4部分组成,行走部分和除冰部分。
行走部分主要通过齿轮传动机构实现,除冰部分通过对滚刀具实现除冰。
关键词:输电线除冰机械式覆冰AbstractMechanical transmission line de-icing technology is used tools by body movements in traditional means to achieve the purpose of transmission line icing. The mechanical transmission line de-icing deicing technology, high efficiency, easy operation. Therefore, the attention by many countries, high in the country also attracted attention, especially in the major universities and research institutes. The ice on the transmission line theory and the consolidated statement of the transmission line against ice impact on people's production and life, to provide new transmission line de-icing solutions. Developing a new transmission line de-icing machine.The transmission line de-icing machine mainly consists of 4 parts, Chassis parts and de-icing. Walking through the gear transmission part, achieved by de-icing rolling tool to achieve some de-icing.Key words: Transmission line de-icing; Mechanical; Ice on the line目录摘要 (I)Abstract .......................................................................................................................... I I 第1章绪论 (1)1.1输电线覆冰概况 (1)1.2输电线覆冰危害及机理 (3)1.3国内外相关除冰设备及技术的特点、发展趋势 (4)1.4除冰机研究的内容和意义 (4)第2章方案设计 (6)2.1 工作原理 (6)2.2 机构的设计方案 (6)2.3 主体结构设计 (10)第3章结构设计 (12)3.1 传动零件的设计 (12)3.1.1 齿轮机构设计 (12)3.1.2 轴的设计 (17)3.1.3 轴承校核 (20)3.2 除冰机构的设计 (23)3.2.1 除冰方式选择 (23)3.2.2刀架设计 (25)3.2.3 除冰机构电机选择 (25)3.3 整机三维装配图 (26)第4章功能及创新点 (29)总结 (30)参考文献 (31)致谢 (33)第1章绪论1.1输电线覆冰概况输电线路因受结冰危害通常容易引起严重的断线、杆塔倒塌、大面积停电、限电等事故。
输电线路开题报告
输电线路开题报告1. 引言输电线路是将电能由发电厂传输至用户的重要通道。
随着电力需求的不断增长,输电线路的建设和维护变得尤为重要。
本报告旨在对输电线路进行全面分析和研究,以便更好地理解和应对输电线路存在的问题,并提出相应的解决方案。
2. 研究背景输电线路是电能传输的主要手段之一,它的安全和稳定运行对于保障电力供应至关重要。
然而,输电线路在长期的使用中面临着多种问题,如老化、损耗、破坏等。
这些问题可能导致线路异常短路、电能损失和供电不稳定,从而给电网运行带来风险。
因此,对输电线路进行深入研究和分析,以解决其存在的问题,提高线路的可靠性和稳定性,具有重要的现实意义和应用价值。
3. 研究目的与意义本研究旨在通过对输电线路进行全面的分析和研究,找出当前存在的问题,并提出相应的解决方案,以改善线路的安全性和可靠性。
研究的主要目的和意义如下:1.分析目前输电线路存在的问题和挑战;2.提出改善输电线路的方法和措施;3.通过研究成果提高电力系统的稳定性和供电质量;4.为输电线路的设计和维护提供参考和指导。
4. 研究内容和方法本研究主要内容包括以下几个方面:4.1 输电线路问题的分析通过对现有输电线路进行调研和实地考察,了解线路存在的问题和挑战。
主要分析以下几个方面内容:•线路老化问题的原因和表现;•输电线路损耗的原因和影响因素;•线路运行异常的原因和演化过程。
4.2 输电线路维护方法的研究通过文献调研和实验分析,总结现有的输电线路维护方法,并针对当前存在的问题进行改进和优化。
主要研究以下几个方面内容:•检修周期的优化;•维护人员的培训和技能提升;•维护设备和工具的改进和更新。
4.3 输电线路安全性评估针对输电线路的安全性问题进行评估和分析,通过数据采集和建模,进行定量分析和综合评价。
主要研究以下几个方面内容:•线路故障发生的概率和趋势预测;•线路故障对电力系统的影响评估;•线路运行状态监测和预警机制的建立。
4.4 输电线路改进方案的制定根据以上的研究内容和研究结果,提出相应的改进方案和措施,旨在提高输电线路的安全性和可靠性。
管道机器人毕业设计开题报告
管道机器人毕业设计开题报告开题报告:管道机器人毕业设计(论文)摘要:在现代工业领域中,管道系统的维护和管理是一个十分重要的任务。
传统的管道维修方法通常需要人工操作,但这种方式存在时间长、工作强度大、操作环境恶劣等问题。
为了解决这些问题,本文将设计一个管道机器人系统,实现管道的智能巡检和维护。
该系统将采用机器人技术、图像处理和控制算法,可以准确地检测管道的损坏并进行修复,提高了工作效率和安全性。
本文将详细分析该系统的设计原理和实现方法,评估其性能和效果,从而为工业领域中的管道维护任务提供一种创新的解决方案。
一、研究背景和意义:管道系统是现代工业生产和生活中的重要组成部分,承担着输送液体、气体和固体物料的功能。
然而,由于长期使用和环境因素的影响,管道系统容易出现漏损、腐蚀和堵塞等问题,导致生产效率下降和安全隐患增加。
传统的管道维修方法通常需要人工进入管道进行检修,这不仅费时费力,而且存在一定的安全风险。
为了解决传统管道维修方法存在的问题,近年来,管道机器人技术受到了广泛关注。
管道机器人是指能够在管道中自主运行、检测和维修的机器人系统。
它可以利用传感器和图像处理技术对管道内的损伤进行检测和定位,并通过操纵机械臂等装置进行维护和修复。
相比传统方法,管道机器人具有工作效率高、安全性好、适用范围广等优势,已广泛应用于石油、化工、供水、排水等行业。
二、研究内容和方法:本文的研究内容是设计和实现一种管道机器人系统,实现对管道的智能巡检和维护。
基于机器人技术、图像处理和控制算法,该系统主要包括以下几个部分:1.硬件设计:设计机器人的结构和传感器装置,以实现在管道中自由运动和损伤检测等功能。
此外,还需要设计操纵机械臂的装置,实现维护和修复操作。
2.软件设计:开发管道机器人的控制程序和图像处理算法。
控制程序通过对传感器信息的处理和分析,实现机器人的智能导航和操作控制。
图像处理算法用于对管道内部的图像进行分析和损伤定位。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
重庆大学 研究生学位论文选题报告 及论文工作实施计划
学 院: 研究生院 专 业: 控制工程 * 名: ** 学位级别: 工程硕士 指导老师: ***
2013年6月 输电线路除冰机器人的设计 1研究目的意义以及国内外研究概况 1.1研究目的及意义 在输变电工程中,输电线路覆冰是高压线路的安全运行的重大隐患之一。输电线路覆冰可引起导线舞动、杆塔倾斜、倒塌、断线及绝缘子闪络等问题[1],从而导致通信中断或大面积停电。然而,目前解决输电线路覆冰的主要措施是以预防为主,紧急情况下大多数采用人工除冰的方式强制使输电线表面的覆冰脱落。然而,人工除冰工作量大,速度慢,安全系数底,致使一旦输电线路严重覆冰便会影响居民日常生活、造成经济损失,使得冰害事故频发等。
图1.1 线路覆冰导致输电线塔杆倒塌 针对输电线路覆冰现象及危害,近年来国内外大力开展对自动除冰机器人的研究,但大多数除冰机器人在对整条输电线进行除冰时不能自动越过绝缘子、防震锤、悬垂线夹等障碍物,因此,能够智能化、高效安全的对输电线路进行除冰,成为保证高压线路安全运行的一大课题。由此可见,输电线路的正常维护和覆冰线路的及时除冰,对于保障电力系统的安全运行乃至国民经济的稳定发展都有着重要的意义。所以本设计着力于设计和开发一种能自动循迹、自动越障、自动除 冰的自动化除冰机器人。 1.2国内外研究现状
1.2.1国外技术研究现状 在输电线除冰机器人的研究领域中,美国TRC公司早在1989年便研制了自治寻线机器人原型,该机器人不仅能沿架空导线上远距离爬行,还能执行电晕损耗、绝缘子、结合点、压接头等视觉检查任务,并能对探测到的线路故障数据预处理后,传送给地面工作人员,当机器人遇到塔杆时,利用手臂采用仿人攀援的方式从侧面越过塔杆[2]。 同年,日本东京电力公司研制出寻线机器人,该寻线机器人能挂钩在架空输电线路上行走,具有跨越防震锤,塔杆等各种障碍的功能[3]。 在2000年,加拿大魁北克水电研究院研制的名为HQLineROVer遥控小车[4],不仅能对输电线路的故障进行红外检查,还能对压接头状态自动进行评估,并能完成导线与地线的更换,同时也能够完成导线清污、导线除冰,但HQLineROVer遥控小车是在人工遥控下运行的,自动化程度较低,并且无越障能力。当遇到障碍物需要人工进行调整。
图1.2 HQ LineROVer遥控小车 2009年,加拿大魁北克水电研究院研制了名为LineScout小车,该小车具有越障功能,突破了除冰机器人无法越障的瓶颈,该越障机构采用了仿人手臂攀援机构[5]。 1.2.2国内技术研究现状 输电线路除冰机器人在国内最早的研究始于1998年,武汉大学研制出了架空高压线路寻线小车,不仅可以通过人工遥控和机械控制器可以实现稳定的行走和越障碍功能,还可以跨越输电线路上的绝缘子、防震锤、悬垂线夹等主要障碍物,并利用红外故障诊断仪完成了线路的诊断。目前该项目组针对22OkV单分裂相线进行了巡线机器人关键技术的研究,在机器人越障能力、智能控制、移动导航、多传感器技术等方面取得了全面的突破,使巡线机器人能够避开和跨越高压输电线路的各种障碍物[6]。 中国科学院沈阳自动化研究所在863计划的支持下开展了“500KV地线巡检机器人的研制”课题攻关,并研制出试验样机。该课题成功攻克了机器人机构、自主控制、数据和图像的传输等关键技术,成功地开发出由巡检机器人和地面移动基站组成的系统,完成了超高压实际环境下的巡检试验。该机器人能够沿500KV地线行走、实时检测和跨越障碍,并可以检测输电线、防震锤、绝缘子和杆塔等输电设备的损伤情况。该巡检机器人的成功研制,在机器人本体、控制系统、检测系统等方面积累了丰富的经验[6]。 2004年,中国科学院兰州分院成功研制出了高压输电线路巡检机器人系统,该巡检机器人包括系统电源、机器人本体、控制系统、检测设备和通讯设备,底面设施包括上下塔杆辅助设施和底面基站。经过现场实验,该设备具有较好的寻线功能,不仅能够完成机器人在线路上自主行走,还能够通过摄像头实现实时监控功能[7]。 此外北京航空航天大学、武汉大学、东南大学、山东大学也开始了对输电线路除冰机器人的研究工作。
2论文的理论依据、研究方法、研究内容 2.1理论依据 2.1.1输电线路覆冰类型与特点 覆冰是在大气温度接近或低于0℃时,有降水并被冰结在温度接近或低于0℃ 的物体上的白色透明或不透明的冰层。若被覆冰物是导线,则称之为导线覆冰。《地面气象观测规范》中称覆冰为积冰,有的地方叫凝冰,也有叫桐油凌、结冰等[8]。线路覆冰分类及特点如表2.1所示。湖南、湖北、江西等省,每逢严冬和初春季节,阴雨连绵,空气湿度很高(90%以上),导线极易覆冰,多位雨淞;云南、贵州等高海拔地区,覆冰多位雾凇或混合淞[9]。 表2.1 线路覆冰分类及特点 名称 性质 形成条件及过程 危害
雨淞 透明或半透明的冰,分布均匀、坚硬,可形成冰柱,密度为0.9g/cm3,粘附力很强
在低地过冷却雨或毛毛细雨落在地域冻结温度的物体上形成,气温-2~0℃;在山地由云中来的冰晶或含有大水滴的底面雾在高风速下形成,气温-4~0℃。 最严重的一种覆冰形式,导线形成雨淞后,如遇降雪或雾凇将导致覆冰迅速增长,且因密度大,产生的机械符合也最大。
雾凇 白色,粒状雪,质轻,为相对坚固的结晶,密度0.3~0.6g/cm3,粘附力颇弱。
在中等风速下形成,在山地由云中来的冰晶或含水滴的雾形成,气温-13~-8℃。 附着力相当弱,对线路一般不构成威胁。
混合淞 不透明(奶色)或白透明冰,常由透明和不透明冰层交错形成,坚硬;密度0.6~0.9g/cm3。粘附力强,生长速度快。 在低地由云中来的冰晶或有雨滴的底面雾形成,气温-5~0℃;在山地,相当高的风速下,由云中水的冰晶或带有中等大小水滴的底面雾形成,气温-4~-3℃。
混合淞是一个符合覆冰过程,首先是雨淞,然后是雾凇,是一种交替的形式,生长速度快,对导线危害特别严重。
白霜 白色,雪状,不规则针状结晶,很脆而轻,密度0.05~0.3g/cm3,粘附力弱。 水汽直接凝结而成,发生在寒冷平静的天气,气温低于-10℃。
粘附力弱,几乎不对线路构成威胁,但会增加输电线路的电晕损失
雪和雾 在低地为干雪,密度低,粘附力弱;在丘陵为凝结雪和雨夹雪或雾,重量达 粘附雪经过多次融化和冻结,成为雪和冰的混合物,可以达到相当高的重量和粘附力弱,几乎不会对线路构成威胁,但会增加电晕损失。 体积。 2.1.2输电线路导线覆冰导致的事故
导线覆冰覆冰引起的事故可以分为如下几类: (1)过负载事故 过负载事故为导线覆冰超过设计抗冰厚度,即覆冰后质量、风压面积增加而导致的机械和电气方面的事故。这种事故造成金具损坏、导线断股、塔杆损折、绝缘子串翻转、撞裂等机械事故;也可能使弧垂增大,造成闪络和烧伤、烧断导线的电气事故。 (2)不均匀覆冰或不同使其脱冰事故 响铃档的不均匀覆冰或线路不同期脱冰会产生张力差、损坏金具、导线和绝缘子及使导线电气间隙减少,发生闪络,也有可能破坏塔杆。 (3)覆冰导线舞动 不均匀覆冰或冰、风荷载的作用使导线产生自激震荡和低频率的舞动,造成金具损坏、导线断股、断线和塔杆倾斜或倒塌等机械及电气事故[10]。
2.1.3输电线路的除冰技术
目前国内外除冰方法有多种,可分为如下4类[10]: (1)热力除冰法 利用附加热源或导线自身发热,使冰雪在到线上无法积覆,或是使已经积覆的冰雪融化。 目前应用较多的是低居里铁磁材料,这种材料在温度<0℃时,磁滞损耗大,发热可阻值积覆冰雪或融冰;当温度>0℃时,不无要融冰,损耗很小。这种方法除冰的效果较为明显,低居里热名防冰套筒和低居里磁热线已投入工程实用。采用人力和动力绕线机除冰能耗成本较高。 (2)机械除冰法 机械外力除冰最早采用有“ad hoc”法、滑轮铲刮法和强力振动法,其中滑轮铲刮法较为实用,它耗能小,价格低廉,但操作困难,安全性能亦需完善。 采用电磁力或电脉冲使导线产生强烈的而又在控制范围内震动来除冰,对雾凇有一定的效果,对雨淞效果有限,除冰效果不佳。 (3)被动除冰法 在到线上安装阻雪环、平衡锤等装置可使到线上的覆冰堆积到一定程度时,由风或其它自然力的作用自行脱落。该法简单易行,但可能因不均匀或不同使其脱冰产生的导线跳跃的线路事故。 (4)其他除冰法 除上诉方法外,电子冻结、电晕放电和碰撞前颗粒冻结、加热等方法也正在国内外研究。
2.1.4机器人的常用控制策略
在目前情况下,机器人建模时总存在误差、各种扰动和一些未知参数等各种不确定性因素。输电线路除冰机器人在系统运行的环境较为复杂,在复杂环境下运行、跨障、除冰等系统稳定性尤为重要,目前采用或正在大力研究的主要控制策略有[11]: (1)传统PID控制 早期的机器人控制大多采用分散单关节PID控制,PID控制作为传统控制方法,其最大的优势就是设计简单,个参数作用、意义明确;另外相应的参数整定技术也经历多年不断发展趋于成熟。 (2)自适应控制 自适应控制的方法就是在运行过程中不断测量受控对象的特征,根据测得的特征信息使控制系统按最新的特性实现闭环最优控制。自适应控制能认识环境的变化,并能改变控制器的参数和结构,自动调整控制作用,以保证系统达到满意的效果。自适应控制是以精确的数学模型为基础的,它不仅要求事先知道对象的模型结构信息,还需要通过辨识获取对象的精确模型。 (3)鲁棒控制 鲁棒控制可以在不确定因素的一定变化范围内,保证系统稳定和维持一定的性能指标,它是一种固定控制,比较容易实现。一般鲁棒控制系统的设计是以一些最差的情况为基础,因此一般系统并不工作在最优状态。 (4)智能控制 在研究机器人等被控对象的模型存在不确定性及位置环境交互作用较强下的控制时,智能控制方法得到了成功的应用。智能控制包括模糊控制、神经网络控制、集成智能控制、学习控制以及专家控制等。人工智能与传统方法不同,它