船舶运动控制新进展
多无人艇集群协同控制研究进展与未来趋势
式 中 : ηi = [xi, yi, ψi]T为 第 i艘 无 人 艇 的 位 置 和 艏 摇
无人艇集群控制理论与应用》项目获得基金委人 工智能重大研究专项资助,将无人艇集群控制研
角向量,单位为[m, m, rad]T,其中(xi, yi)为 XE-YE 坐 标 系 下 的 位 置 , τi = [τiu, τiv, τir]T为 控 制 输 入 力 和
AUV), 可 用 于 海 洋 资 源 的 开 发 和 海 洋 权 益 的 争 夺 。 [1-2]
无人艇作为一种以遥控或自主方式航行的小 型化、智能化、多用途无人海洋运载平台,是现代 多种高技术集成的产物,是一个国家海洋科技实 力的重要体现。无人艇具有全天候执行任务的能 力,尤其是可以在恶劣的海洋环境中代替人类执 行危险、耗时且费力的作业任务,在军事和民事 领域都具有广泛的应用前景 。 [3-4] 近年来,美、英、
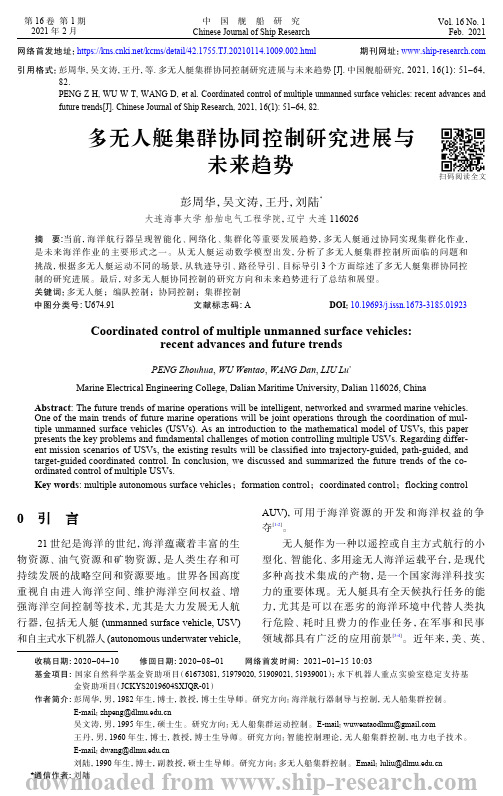
船舶涉及纵荡、横荡、垂荡、横摇、纵摇和艏 摇 6 个自由度的运动。对于无人艇而言,通常忽 略垂荡、横摇和纵摇 3 个自由度上的运动。如图 1 所示,一般在 2 个坐标系下对无人艇的运动进行 描 述 , 即 XE-YE 地 球 坐 标 系 和 XB-YB 船 体 坐 标 系 。 图中,ψi为艏摇角;νi = [ui, vi, ri]T为第i艘无人艇的 线 速 度 和 角 速 度 向 量 , 单 位 为 [m/s, m/s, rad/s]T, 其中ui和vi分别为 XB-YB 坐标系下的纵荡速度和横 荡速度,ri为艏摇角速度;βi 为侧滑角。
究推向了新的高度。由此可见,国内外对无人艇 力矩向量,单位为[N, N, N · m]T;τiw = [τiwu, τiwv, τiwr]T
downloaded 集群控制技术的研究方兴未艾 from ,迫切需要进一w步ww为由.s风h浪i流p海-洋r环e境s引e起a的r扰c动h向.c量o,单m位为
船舶减摇水舱控制技术现状与展望

船舶减摇水舱控制技术现状与展望摘要:船舶在海面航行时,会由于海况的影响,导致横摇运动加剧。
减摇水舱作为最广泛使用的减摇装置之一,具有结构简单、成本低、可在零航速和低航速下进行减摇等优点。
可控被动式减摇水舱作为一种高效的减摇水舱,可通过自动控制系统控制气阀和水阀的状态改变水舱内水的振荡周期,以适应不断变化的海况,保证在任何海浪的作用下都可以进行减摇。
由此可见,良好的减摇水舱控制系统,对提高减摇水舱的减摇效果,进而改善船舶的安全性,减少运输成本,提高装卸效率,有着重要的作用。
关键词:船舶减摇水舱控制技术现状展望引言船舶在海上航行时会受到海风、海浪等的影响,在其作用下会产生剧烈的横摇及横荡运动,这会给船舶的航行安全带来威胁,同时也会给乘客造成不适的感觉,所以如何减小船舶航行过程中的摇摆就成为一个十分有意义的研究课题.减摇水舱是减小船舶横摇的重要减摇装置之一,尤其是在低航速和零航速时,常规的减摇装置如减摇鳍难以发挥作用,采用减摇水舱造价低廉,可以有效解决船舶低航速航行时的耐波性问题,达到明显的减摇效果.减摇水舱在国外应用比较广泛.我国的一些院所也展开过这方面的研究,但鲜有成熟产品.随着对船舶及舰艇耐波形要求的日益提高,开发经济、有效的减摇装置势在必行,减摇水舱无疑是最合适的减摇装置之一.1.船在波浪作用下的运动船舶在水面上的运动有六个运动自由度。
如果以船的首尾方向为 x 轴、左右舷方向为 y 轴、上下方向为 z 轴建立坐标系,那么,沿 x、y 和z 方向的平动分别称为纵荡、横荡和升沉;绕 x、y 和 z 轴的转动分别称为横摇、纵摇和首摇(图1)。
由于水的抗剪切能力极小,所以漂浮在水上的船舶在非零外力的作用下总是不可避免地发生运动,包括平动和转动,即摇摆。
由于横摇运动的惯性矩相对较小,所以横摇运动往往最为剧烈。
即减摇一般是针对船舶的横摇,也是船舶减摇研究的主要内容。
图1 船在水面上运动的坐标系2.船舶减摇技术发展现状近年来,世界船舶技术在大型化、高速化、高性能化三个方面的进步非常明显,这对船舶减摇技术提出了新的要求和挑战。
船舶操纵的控制技术发展综述

船舶操纵的控制技术发展综述摘要介绍与比较了船舶操纵的各种自动舵控制方法,船舶自动舵可分为4个发展阶段,即机械舵、PID舵、自适应舵和智能舵,其中智能舵为目前最先进的自动舵,它分为专家系统、模糊舵和神经网络舵.关键词船舶操纵;自动舵;PID控制;自适应控制;智能控制分类号TP273.2;U666.153Overview on the Development and Comparisonof the Control Techniques on Ship ManeuveringCheng Qiming Wan Dejun(Department of Instrument Science and Engineering, Southeast University, Nanjing 210096)Abstract:The control methods of ship maneuvering autopilot are described and compared. The ship autopilots contain four developmental stages, that is, mechanical, PID, adaptive and intelligent control autopilot. The intelligent autopilot is now the most advanced autopilot, its control methods can be divided into expert system, fuzzy control and neural network.Key words:ship maneuvering; autopilot; PID control; adaptive control; intelligent control船舶操纵的自动舵[1,2]是船舶系统中不可缺少的重要设备,随着对航行安全及营运需求的增长,人们对自动舵的要求也日益提高. 本世纪20年代,美国的Sperry和德国的Ansuchz 在陀螺罗径研制工作取得实质进展后分别独立地研制出机械式的自动舵[3],它的出现是一个里程碑,使人们看到了在船舶操纵方面摆脱体力劳动实现自动控制的希望,这是第1代自动舵. 机械式自动舵只能进行简单的比例控制,为了避免振荡,需选择低的增益,它只能用于低精度的航向保持控制. 本世纪50年代,随着电子学和伺服机构理论的发展及应用,集控制技术和电子器件的发展成果于一体的、更加复杂的第2代自动舵问世了,这就是著名的PID舵[4]. 自然PID舵比第1代自动舵有长足进步,但缺乏对船舶所处的变化着的工作条件及环境的应变能力,因而操舵频繁,操舵幅度大,能耗显著. 到了60年代末,由于自适应理论和计算机技术得到了发展,人们注意到将自适应理论引入船舶操纵成为可能,瑞典等北欧国家的一大批科技人员纷纷将自适应舵从实验室装到实船上,正式形成了第3代自动舵[5~18]. 自适应舵在提高控制精度、减少能源消耗方面取得了一定的成绩,但物理实现成本高,参数调整难度大,特别是因船舶的非线性、不确定性,控制效果难以保证,有时甚至影响系统的稳定性,尽管存在这些困难,熟练的舵手运用他们的操舵经验和智慧,能有效地控制船舶,为此,从80年代开始,人们就开始寻找类似于人工操舵的方法,这种自动舵就是第4代的智能舵[19~29]. 此外,80年代前船舶上安装的自动舵一般只能进行航向控制,它可把船舶控制在事先给定的航向上航行. 随着全球定位系统(GPS)等先进导航设备在船舶上装备,人们开始设计精确的航迹控制自动舵,这种自动舵能把船舶控制在给定的计划航线上.1PID控制直到70年代早期,自动舵还是一个简单的控制设备,航向偏差给操舵设备提供修正信号,此时控制方程为式中,δ,e分别为舵角信号和航向偏差信号;K为比例常数,它应被整定以适应载重和环境要求,为避免振荡,K应取较低值.对于稳定低速航行的船舶,式(1)控制效果基本上是令人满意的,但对不稳定的船舶,式(1)是不合适的. 一个更为先进的控制系统应包含航向误差导数项,它的形式为当存在由横向风引起的下风或上风力矩干扰时,为使航向保持不变,应加入航向偏差的积分项,此时方程式变为这就是经典的PID控制器结构.根据Mort的论文[4],积分项的加入可能会降低舵的响应速度,这会使船舶反应迟钝,为抵消这种影响,可再加入一个加速项,这样控制方程又成为整定好控制参数K1~K4的式(3)或式(4)能得到较好的操纵性能.对海浪高频干扰,PID控制过于敏感,为避免高频干扰引起的频繁操舵,常采用“死区”非线性天气调节,但死区会导致控制系统的低频特性恶化,产生持续的周期性偏航,这将引起航行精度降低,能量消耗加大.此外,当船舶的动态特性(速度、载重、水深、外型等)或外界条件(风、浪、流等)发生变化时,控制参数需连续地进行人工整定,控制参数不合适的控制器将导致差的控制效果,如操舵幅度大、操舵频繁等,而人工整定参数很麻烦,为此,人们提出了自适应控制方法.2自适应控制任何自适应系统都应能连续地自动辨识(整定)PID算法的控制参数,以适应船舶和环境条件的动态特性. 目前提出的方法主要有自适应PID设计法、随机自适应法、模型参考法、基于条件代价函数的自校正法、最小方差自校正法、线性二次高斯法、H∞控制法、变结构法等,这些自适应方法都有各自的优缺点,并且自适应法还处于不断的发展过程中.Sugimoto等[5]提出的自适应PID设计法把自适应思想引入到PID控制设计中,此法着重解决使用自适应函数的波浪条件的识别问题,这个函数根据波浪条件信号、船速和载重情况选择最佳控制参数,此最佳参数值被送给控制器和卡尔曼滤波器. 此法采用海洋分析器测量波浪,测量的结果用于计算波浪条件指标.Merlo等[6]的随机自适应法包含一个参数,此参数由海浪自回归滑动平均模型中的海浪功率谱决定,此法包括一个代价函数,它的形式为也就是假定代价函数J是航向偏差y(n)和舵操作u(n)的均方加权函数,此法的目标是使J值为最小.此法与Motora[7]提出的方法不同,Motora的代价函数形式为式中,θ为航向偏差;δ为舵角;λ取为8(Norrbin[8]建议取为4),最优控制的代价函数究竟采用何种形式还没有完好的评判标准.Akaike[9,10]提出了多变量随机系统的辨识方法,此法是在Ohtsu等[11]提出的方法基础上发展起来的,它的模型取决于最小Akaike信息标准,它的代价函数依赖于被控变量的偏差、控制信号大小(舵角)和控制信号变化率的补偿值.Amerogen[12]的模型参考自适应法的应用前提为过程是线性、阶次和结构已知,且无随机扰动. Dennis[13]通过假定船舶是线性、常系数、无限工作系统,提出了船舶线性叠加原理,此原理把船舶对不规则海况的响应用对构成这种海况的规则分量响应的线性累加来表示. 由于船舶实际上是一个含有噪声的非线性系统,因此,在平静的天气和“完美”的条件下,此法设计的系统工作很好,但在较差海况及载重变化的条件下,这种系统的控制效果变差.Lim等[14]使用Clarke等[15]提出的基于条件代价函数的自校正方法,此法的控制器输出被明确地加到性能标准公式中. 自校正自动舵能用每个取样时刻的Ricatti方程稳态解的计算值来设计,航向保持和航向改变采用不同的性能标准. 对一个未知参数的系统来说,由于波浪会使船舶动态特性发生变化,因而需用在线辨识技术识别动态参数. 此法主要问题是波浪系统建模引起的偏差,以及Ricatti方程的求解计算时间较长.Katebi等[16]的线性二次高斯法使用公式表示动态代价函数,并在用多项式表示的随机结构中优化代价函数,此法与风和浪的测量和计算有关,波浪的模型被用作控制函数,以便使输出信号的变化为最小. 风力由平均风速和扰动组成,平均风速只用作建模,系统的误差将随风、浪的测量和建模出现.Messer等[17]的H∞控制法采用横摇与舵角之间关系式作为船舶运动模型,前向速度的影响包含在频率项中,航迹偏差表示成航向和实际船位的函数,用假定的横摇/偏航动态特性来确定航迹偏差与需要的航向之间要求的关系.Papoulias等[18]提出的船舶操纵变结构(滑模)控制采用伪线性变换将船舶操纵非线性系统近似地化为线性可控正则型系统,以简化控制设计并保证较大工作范围内的控制性能与精度,然后,对线性化系统设计了一种连续的变结构控制,以适应较大范围的干扰变化,完全抑制抖振,并得到理想的精度.总之,自适应控制技术不仅与代价函数的估计值有关,而且也与精确地建立扰动模型有关,在船舶所遇到的复杂的工作台条件下,自适应自动舵并不能提供完全自动的最优操作.3智能控制对有限维、线性和时不变的控制过程,传统控制法是非常有效的,如果这样的系统是充分已知的,那么,它们能用线性分析法表示、建模和处理,但实际船舶系统常具有不确定性、非线性、非稳定性和复杂性,很难建立精确的模型方程,甚至不能直接进行分析和表示,而人工操作者通过他们对所遇情况的处理经验和智能理解与解释,就能有效地控制船舶航行. 因此,人们很自然地开始寻找类似于人工操作的智能控制方法[19]. 目前已提出3种智能控制方法,即专家系统、模糊控制和神经网络控制.专家系统的关键技术是知识经验的获取与表示. Brown等[20]采用了模仿人工操作的专家系统方法,而并没有直接使用船舶的数学模型,通过研究人工操作与普通自动舵控制之间的差异,建立了规则库以便修正自动舵的特性,也就是自动舵与基于规则的专家系统之间进行交互作用. 例如,舵手把两次连续的转弯当作一次长的转弯来处理,这种措施及其它类似措施都可在修正后的自动舵上实现. 此文还论述了这种模拟人工操作的自动舵构造方法,当然,这里的舵手是选择对不同船舶、工作条件、环境及可能发生的情况很有处理经验的人. 这种的自动舵专家系统与船舶操纵模型无关.模糊控制不需建立被控对象的精确数学模型,它的算法简单,便于实时控制. Amerongen 等[21]提出的船舶航向模糊控制系统由模糊化、模糊推理决策、反模糊化三部分组成,此系统取得了较好的控制效果,但由于受船舶控制过程的非线性、高阶次、时变性以及随机干扰等因素影响,造成原有的模糊控制规则粗糙或不够完善,影响了控制效果. 为克服这些缺点,模糊控制器向着自适应、自组织、自学习方向发展,使得模糊控制参数或/和规则在控制过程中自动地调整、修改和完善,从而使系统的控制性能不断改善,达到最佳的控制效果. Sutton等[22]提出了船舶航向的自组织模糊控制器,它是在简单模糊控制器的基础上,增加性能测量、控制量校正和控制规则修正3个功能块而构成的一种模糊控制器. Jeffery等[23]提出了一种船舶航向的模型参考模糊自适应控制系统,此法中利用参考模型表示船舶在转向时的性能要求,然而其控制器及自适应功能是利用模糊控制技术实现的,其控制器为基本模糊控制器借助于对象的模糊逆模型得到用于自适应修正的校正量.神经网络具有非线性映射(逼近)能力以及自学习、自组织、自适应、分布存贮、联想记忆、并行计算等能力. 它的缺点是理论不成熟、实时性差、硬件实现成本高等. 目前的神经网络控制器还处于软件仿真模拟阶段. Witt等[24]提出了一种神经网络控制船舶航迹保持的方法,它用GPS精确决定船舶位置,在-45°~+45°范围内它能产生随机变化航向的一系列给定航线,它采用PD控制器作为船舶的数学模型,在给定航线的每一部分,通过使PD舵控制信号与神经舵控制信号之间差值最小,来离线训练神经控制器,一旦差值最小,神经控制器就被认为已学习到了PD控制器的工作特性,此后,神经控制器就可取代PD控制器. Witt等使用100种给定航线集合训练神经网络,并假定通过这100种不同航线学习得到的知识可处理任何新选择的航线,仿真结果表明对未学习过的任意航线,PD控制器和神经控制器的控制效果基本相同. Burn[25]采用更复杂的最优控制器进行离线学习,这篇文章主要工作是训练神经网络,使它与最优船舶控制系统具有相同的性能,训练后的神经控制器能识别出不同的前向速度,或操纵情况怎样改变船舶的动态特性. 原则上,六自由度船舶运动模型和舵机模型的组合可得到状态矩阵,当辨识出最优控制系统的特性后(对不同的前向速度),影响舵机的状态变量被输入到最优控制系统和三层前向神经网络,两系统计算各自的舵令,两舵令差值用于训练神经网络,训练采用BP算法. 对每种选定的前向速度的每种方案,使用20万个采样数据来训练神经网络. 神经网络的隐层和每层神经元最佳数以及反向传播学习法的学习速率和动量因子的最佳值都采用试探法确定,最后仿真比较了最优控制器和神经控制器所产生的航迹偏差大小. 在上述的2种方法中,一旦被选用的传统控制器和神经控制器的控制作用误差足够小,就可认为神经控制器已训练好了,从而可用神经控制器取代传统控制器. Hearn等[26,27]提出一种在线训练的船舶神经控制系统,此法只要知道船舶操作的一般定性知识,就可完全去除船舶动态特性的数学模型辨识过程,此法还不需要“教师”进行监督学习. 此法BP学习算法中的误差函数对权值的偏导数采用它们本身的符号函数来近似表示,舵机执行器输出的脉动变化和饱和问题通过选择暂时的训练目标并建立模糊规则表来解决,仿真表明此法控制器优于PID控制器的控制效果.4国内研究状况国内在自动舵方面研究工作开展较早和研究水平较高的单位主要有大连海事大学轮机系、哈尔滨船舶工程学院自控系、上海交通大学仪器系、清华大学仪器系、华东船舶工程学院自控系、武汉海军工程学院、华东理工大学造船系、厦门集美大学航海学院、中国船舶总公司船舶系统工程部、中国船舶总公司707所九江分部等. 他们发表了大量自动舵控制方法的论文,其研究成果基本上都处于理论仿真阶段,还没有形成过硬的自动舵产品.目前国外市场上有多种成熟的航向舵、航迹舵产品,但控制方法大多为比较成熟的自适应控制,近几年发展起来的智能控制及其它近代控制在自动舵上应用处于方案可行性论证阶段. 国内自动舵生产厂家也很多,如九江、上海、广州、锦州等航海仪器厂或仪表厂,其产品以落后的模拟式航向舵为主,航迹舵基本上还处于研制阶段.我校1995年开始进行自动舵开发与研究工作,此课题得到中国船舶工业国防科技应用、基础研究基金项目“舰船航行智能控制技术”和九江仪表厂委托开发项目“数字式航迹操舵仪”等资助. 目前我们开发的自动舵样机已通过厂家验收,现正做进一步的完善工作,力争早日鉴定并生产,此外,我们在自动舵的理论研究方面也取得了一些成果,现已在核心刊物上发表了多篇论文.5结论本文简单介绍了船舶操纵自动舵的控制方法发展过程及各种控制方法,控制方法可分为机械控制、PID控制、自适应控制和智能控制4个发展阶段,文中还比较了这些方法的优缺点. 由于这些方法都有各自的优点,因此,近年来自动舵的控制方法正向组合集成型方向发展,如PID与模糊控制结合、PID与神经控制结合、模糊控制与神经控制结合[28]、模糊控制与遗传算法结合[29]、神经控制与遗传算法结合等.船舶操纵的控制技术发展综述船舶操纵的控制技术发展综述*程启明万德钧摘要介绍与比较了船舶操纵的各种自动舵控制方法,船舶自动舵可分为4个发展阶段,即机械舵、PID舵、自适应舵和智能舵,其中智能舵为目前最先进的自动舵,它分为专家系统、模糊舵和神经网络舵.关键词船舶操纵;自动舵;PID控制;自适应控制;智能控制分类号TP273.2;U666.153Overview on the Development and Comparisonof the Control Techniques on Ship ManeuveringCheng Qiming Wan Dejun(Department of Instrument Science and Engineering, SoutheastUniversity, Nanjing 210096)Abstract:The control methods of ship maneuvering autopilot aredescribed and compared. The ship autopilots contain four developmentalstages, that is, mechanical, PID, adaptive and intelligent control autopilot.The intelligent autopilot is now the most advanced autopilot, its controlmethods can be divided into expert system, fuzzy control and neural network. Key words:ship maneuvering; autopilot; PID control; adaptive control; intelligent control船舶操纵的自动舵[1,2]是船舶系统中不可缺少的重要设备,随着对航行安全及营运需求的增长,人们对自动舵的要求也日益提高. 本世纪20年代,美国的Sperry和德国的Ansuchz在陀螺罗径研制工作取得实质进展后分别独立地研制出机械式的自动舵[3],它的出现是一个里程碑,使人们看到了在船舶操纵方面摆脱体力劳动实现自动控制的希望,这是第1代自动舵. 机械式自动舵只能进行简单的比例控制,为了避免振荡,需选择低的增益,它只能用于低精度的航向保持控制. 本世纪50年代,随着电子学和伺服机构理论的发展及应用,集控制技术和电子器件的发展成果于一体的、更加复杂的第2代自动舵问世了,这就是著名的PID舵[4]. 自然PID舵比第1代自动舵有长足进步,但缺乏对船舶所处的变化着的工作条件及环境的应变能力,因而操舵频繁,操舵幅度大,能耗显著. 到了60年代末,由于自适应理论和计算机技术得到了发展,人们注意到将自适应理论引入船舶操纵成为可能,瑞典等北欧国家的一大批科技人员纷纷将自适应舵从实验室装到实船上,正式形成了第3代自动舵[5~18]. 自适应舵在提高控制精度、减少能源消耗方面取得了一定的成绩,但物理实现成本高,参数调整难度大,特别是因船舶的非线性、不确定性,控制效果难以保证,有时甚至影响系统的稳定性,尽管存在这些困难,熟练的舵手运用他们的操舵经验和智慧,能有效地控制船舶,为此,从80年代开始,人们就开始寻找类似于人工操舵的方法,这种自动舵就是第4代的智能舵[19~29]. 此外,80年代前船舶上安装的自动舵一般只能进行航向控制,它可把船舶控制在事先给定的航向上航行. 随着全球定位系统(GPS)等先进导航设备在船舶上装备,人们开始设计精确的航迹控制自动舵,这种自动舵能把船舶控制在给定的计划航线上.1 PID控制直到70年代早期,自动舵还是一个简单的控制设备,航向偏差给操舵设备提供修正信号,此时控制方程为分别为舵角信号和航向偏差信号;K为比例常数,它应被整定式中,δ,e以适应载重和环境要求,为避免振荡,K应取较低值.对于稳定低速航行的船舶,式(1)控制效果基本上是令人满意的,但对不稳定的船舶,式(1)是不合适的. 一个更为先进的控制系统应包含航向误差导数项,它的形式为当存在由横向风引起的下风或上风力矩干扰时,为使航向保持不变,应加入航向偏差的积分项,此时方程式变为这就是经典的PID控制器结构.根据Mort的论文[4],积分项的加入可能会降低舵的响应速度,这会使船舶反应迟钝,为抵消这种影响,可再加入一个加速项,这样控制方程又成为整定好控制参数K1~K4的式(3)或式(4)能得到较好的操纵性能.对海浪高频干扰,PID控制过于敏感,为避免高频干扰引起的频繁操舵,常采用“死区”非线性天气调节,但死区会导致控制系统的低频特性恶化,产生持续的周期性偏航,这将引起航行精度降低,能量消耗加大.此外,当船舶的动态特性(速度、载重、水深、外型等)或外界条件(风、浪、流等)发生变化时,控制参数需连续地进行人工整定,控制参数不合适的控制器将导致差的控制效果,如操舵幅度大、操舵频繁等,而人工整定参数很麻烦,为此,人们提出了自适应控制方法.2 自适应控制任何自适应系统都应能连续地自动辨识(整定)PID算法的控制参数,以适应船舶和环境条件的动态特性. 目前提出的方法主要有自适应PID设计法、随机自适应法、模型参考法、基于条件代价函数的自校正法、最小方差自校正法、线性二次高斯法、H∞控制法、变结构法等,这些自适应方法都有各自的优缺点,并且自适应法还处于不断的发展过程中.Sugimoto等[5]提出的自适应PID设计法把自适应思想引入到PID控制设计中,此法着重解决使用自适应函数的波浪条件的识别问题,这个函数根据波浪条件信号、船速和载重情况选择最佳控制参数,此最佳参数值被送给控制器和卡尔曼滤波器. 此法采用海洋分析器测量波浪,测量的结果用于计算波浪条件指标.Merlo等[6]的随机自适应法包含一个参数,此参数由海浪自回归滑动平均模型中的海浪功率谱决定,此法包括一个代价函数,它的形式为也就是假定代价函数J是航向偏差y(n)和舵操作u(n)的均方加权函数,此法的目标是使J值为最小.此法与Motora[7]提出的方法不同,Motora的代价函数形式为式中,θ为航向偏差;δ为舵角;λ取为8(Norrbin[8]建议取为4),最优控制的代价函数究竟采用何种形式还没有完好的评判标准.Akaike[9,10]提出了多变量随机系统的辨识方法,此法是在Ohtsu等[11]提出的方法基础上发展起来的,它的模型取决于最小Akaike信息标准,它的代价函数依赖于被控变量的偏差、控制信号大小(舵角)和控制信号变化率的补偿值.Amerogen[12]的模型参考自适应法的应用前提为过程是线性、阶次和结构已知,且无随机扰动. Dennis[13]通过假定船舶是线性、常系数、无限工作系统,提出了船舶线性叠加原理,此原理把船舶对不规则海况的响应用对构成这种海况的规则分量响应的线性累加来表示. 由于船舶实际上是一个含有噪声的非线性系统,因此,在平静的天气和“完美”的条件下,此法设计的系统工作很好,但在较差海况及载重变化的条件下,这种系统的控制效果变差.Lim等[14]使用Clarke等[15]提出的基于条件代价函数的自校正方法,此法的控制器输出被明确地加到性能标准公式中. 自校正自动舵能用每个取样时刻的Ricatti方程稳态解的计算值来设计,航向保持和航向改变采用不同的性能标准. 对一个未知参数的系统来说,由于波浪会使船舶动态特性发生变化,因而需用在线辨识技术识别动态参数. 此法主要问题是波浪系统建模引起的偏差,以及Ricatti方程的求解计算时间较长.Katebi等[16]的线性二次高斯法使用公式表示动态代价函数,并在用多项式表示的随机结构中优化代价函数,此法与风和浪的测量和计算有关,波浪的模型被用作控制函数,以便使输出信号的变化为最小. 风力由平均风速和扰动组成,平均风速只用作建模,系统的误差将随风、浪的测量和建模出现.控制法采用横摇与舵角之间关系式作为船舶运动Messer等[17]的H∞模型,前向速度的影响包含在频率项中,航迹偏差表示成航向和实际船位的函数,用假定的横摇/偏航动态特性来确定航迹偏差与需要的航向之间要求的关系.Papoulias等[18]提出的船舶操纵变结构(滑模)控制采用伪线性变换将船舶操纵非线性系统近似地化为线性可控正则型系统,以简化控制设计并保证较大工作范围内的控制性能与精度,然后,对线性化系统设计了一种连续的变结构控制,以适应较大范围的干扰变化,完全抑制抖振,并得到理想的精度.总之,自适应控制技术不仅与代价函数的估计值有关,而且也与精确地建立扰动模型有关,在船舶所遇到的复杂的工作台条件下,自适应自动舵并不能提供完全自动的最优操作.。
无舵双桨船舶运动控制系统的研究

2441 绪论本文所研究的船舶驱动方式为无舵双螺旋桨方式,取消了常规船舶用于转向的操舵转向方式。
螺旋桨电机转动产生的推力是船舶运动的动力来源,当两个螺旋桨电机转速相同时,船舶作直线运动;当两个螺旋桨电机的转速不同时,转速差会在船舶的重心出产生一个转向力矩,驱动船体进行转向,此类转向方式控制方便多用于小型船舶[1]。
本文设计了一种无舵双螺旋桨船舶的运动控制系统,为进一步研究此类船舶运动提供一定的依据。
2 螺旋桨数学模型螺旋桨在水中旋转一圈的同时其在轴线上运动的距离称为螺旋桨的进程,螺旋桨的进程与螺旋桨直径D 的比值称为进速比,对进速比进行有界处理后其表达式为: (1)其中,V 为船舶的航速度,n 为螺旋桨的转速,D 为螺旋桨的直径。
螺旋桨转动产生的螺旋桨推力与力矩如下:F=K p ρn 2D 4T =K M ρn 2D 5 (2)其中,K p ,K M 分别为螺旋桨的推力系数和转矩系数,都是进速比的函数[2]。
3 螺旋桨等效舵理论本文所研究的船舶没有舵,转向时是通过两个螺旋桨电机的转速差在船体的重心处产生转向力矩实现转向动作。
基于对无舵双螺旋桨船舶的的数学建模,左右螺旋桨电机转速不同在船舶重心处产生的力矩为[3]:N =(1+d N )[T z (y cos θz +x sin θz )+T y (-y cos θy +x sin θy )](4)其中,d N 为转船力矩的响应因素,T z 和T y 为左右螺旋桨的力矩,y 为螺旋桨距离船体重心的横向距离,x 为螺旋桨距离船体重心的纵向距离而在有舵的船艇中。
转向一定角度时由舵产生的力矩和转向角度的关系为:N d =(1+d N )x R F d cos δ (5)其中,x R 为舵到船舶重心的横向距离,F d 为舵叶也所受的力,δ为舵角。
以上两个式子是驱动无舵双桨船舶和有舵船舶转向的力矩,将它们进行等效近似变换化简后得出螺旋桨等效舵的模型为:(6)其中,n 为左右螺旋桨电机的平均转速,v 为水流速度,A R 为舵叶面积,k t 为左右螺旋桨的推力系数的平均值。
多无人艇集群协同控制研究进展与未来趋势
YE
图 1 地球坐标系和艇体坐标系 Fig. 1 Reference frames: earth-fixed reference frame and body-
fixed reference frame
队 试 验 。 华 中 科 技 大 学 研 发 了 HUSTER 全 自 主 无人艇,完成了 5 艘无人艇的十字和环形编队队 形湖上试验。大连海事大学研制了一套多无人艇 集群协同控制系统,开展了协同路径跟踪、协同 目标跟踪、协同目标包围等协同控制试验,实现 了 7 艘无人艇的“一字”、“人字”、“环形”等多种
无人艇集群控制研究涉及舰船科学、制导与控 制、人工智能、通信科学、计算机科学、仿生学等 众多学科和技术领域,综合多学科理论和技术对 无人艇集群协同控制问题进行研究,为无人艇海 洋作业提供新理论、新方法和新技术,既体现智 能船舶的发展趋势,又满足国家海洋战略的发展 需求,具有重要的科学意义和应用价值[5, 。 8]
挑战,根据多无人艇运动不同的场景,从轨迹导引、路径导引、目标导引 3 个方面综述了多无人艇集群协同控
制的研究进展。最后,对多无人艇协同控制的研究方向和未来趋势进行了总结和展望。
关键词:多无人艇;编队控制;协同控制;集群控制
中图分类号: U674.91
文献标志码: A
DOI:10.19693/j.issn.1673-3185.01923
彭周华等:多无人艇集群协同控制研究进展与未来趋势
53
[N, N, N · m]T; gi(νi)包 括 未 建 模 流 体 动 态 和 建 模
船舶涉及纵荡、横荡、垂荡、横摇、纵摇和艏 摇 6 个自由度的运动。对于无人艇而言,通常忽 略垂荡、横摇和纵摇 3 个自由度上的运动。如图 1 所示,一般在 2 个坐标系下对无人艇的运动进行 描 述 , 即 XE-YE 地 球 坐 标 系 和 XB-YB 船 体 坐 标 系 。 图中,ψi为艏摇角;νi = [ui, vi, ri]T为第i艘无人艇的 线 速 度 和 角 速 度 向 量 , 单 位 为 [m/s, m/s, rad/s]T, 其中ui和vi分别为 XB-YB 坐标系下的纵荡速度和横 荡速度,ri为艏摇角速度;βi 为侧滑角。
船舶设计与建造的最新技术进展

船舶设计与建造的最新技术进展在如今不断发展的航运业中,船舶设计与建造领域的技术进步对于提高航行效率、降低成本以及提升船舶安全性都起到了至关重要的作用。
本文将介绍船舶设计与建造的最新技术进展,包括船体材料、动力系统、自动化技术和环保措施等方面。
1. 船体材料的创新船体材料的选择对船舶的载重能力、强度和耐久性有着重要影响。
传统上,钢铁是主要的船体材料,但如今航空航天领域的进展为船舶设计带来了新的材料选择,例如高强度复合材料和铝合金。
这些新材料具有更好的强度、重量比和抗腐蚀性能,能够降低船舶自重并提高燃油经济性。
2. 绿色动力系统随着对环境保护意识的提高,船舶设计和建造行业逐渐转向采用更为环保和节能的动力系统。
传统的船舶动力通常采用燃油发动机,而现在越来越多的船舶开始采用液化天然气(LNG)作为动力燃料。
LNG可以降低温室气体和颗粒物排放,提高船舶的环境可持续性。
此外,还有一些船舶采用太阳能、风能和氢燃料电池等新兴的清洁能源技术,为船舶提供动力。
3. 自动化技术的应用船舶设计与建造中的自动化技术的应用可提高船舶的操控性、运营效率和安全性。
船舶自动化技术主要包括自动驾驶系统、智能导航和集成的船舶信息系统。
自动驾驶系统可以通过计算机和传感器来实现船舶的自动导航和避碰,减少人为失误的风险;智能导航系统可以根据天气、海洋条件和船舶状态进行实时调整航线和速度。
集成的船舶信息系统则可以集中管理船舶的各种信息,包括航行数据、货物追踪和设备状态等,提高船舶的运营管理效率。
4. 船舶环保措施随着全球环境问题的日益严峻,船舶设计与建造行业开发了一系列环保措施以减少船舶对海洋和大气的污染。
船舶排放控制区域的设立和船舶排放标准的制定要求船舶使用低硫燃油或安装排放控制装置,以减少硫氧化物和氮氧化物的排放。
此外,还有一些新技术应用于船舶设计中,如洗涤装置和废弃物处理设施,以最大程度地降低废水和垃圾的排放。
综上所述,船舶设计与建造的最新技术进展涵盖了船体材料、动力系统、自动化技术和环保措施等方面。
船舶振动主动控制的研究进展探讨

船舶振动主动控制的研究进展探讨作者:徐华国范超来源:《科学与财富》2018年第19期摘要:本文在此以船舶振动当中的阻尼技术、在船舶当中的使用方式、船舶振动的隔离技术、动力吸振器的相关研究和整船振动的控制技术研究等方面为基础,对船舶振动主动控制技术实施了探讨,阐述了近些年主动控制技术应用于船舶振动主动控制的研究进展,并提出了加快船舶振动主动控制研究发展进程的相关办法。
希望能够起到一定的帮助作用。
关键词:船舶振动;主动控制;研究进展引言舰船的振动和产生的噪声一直以来都被船舶界高度关注。
船舶振动时,经常使用的有阻尼技术、动力式机械隔振与振动式吸振等。
尽管这些办法具有一定的经济性和可靠性,然而因船舶的振动较为复杂且又要求其必须达到一定的效果,而振动被动控制技术在低频时段的振动控制又不是很理想,无法与外界的振动变化相适合,导致振动被动控制技术的使用范围较为狭窄。
然而,还因其可以对结构振动的相关特性加以检测,同时能够随时做出响应,并有着较强的适应性特点,使其在船舶的振动和噪声的控制方面还是得到了使用,而且在以后会被更加广泛。
1.阻尼技术在船舶当中的具体应用方法阻尼技术对于控制船舶的振动有着非常明显的效果。
根据结构形式的不同,阻尼技术包含自由阻尼以及约束阻尼两种技术。
这当中,自由阻尼主要就是在应被减振和降噪的物体表面粘贴或者喷上一层具有阻尼特性的材料;而所谓的约束阻尼就是在结构物体与具有金属特性的约束板之间粘上具有阻尼性质的材料,后者所起到的作用要比前者明显好很多。
相关研究人员曾经对化工部海洋涂料研究所研发出来的T54/T60型号的具有阻尼性质的涂料实施了试验,使用阻尼性能相对较好的锰铜合金材料来制作中间机座,组建出了模型测试系统,试验结果表明,其所起到的减振作用非常显著。
另有一些相关学者对具有粘弹特性的材料的筏架组成和艇体以及声学方面介质的耦合性实施了更加细致化的理论性探究,接下来又对在阻尼处理的范围与具体位置还有上下层隔振器的刚体变化、基座面以及板厚的改变等方面对浮筏隔振系统在传递性质上所产生的影响实施了精确的计算和探究。
船舶建造项目进度管理与控制策略研究

船舶建造项目进度管理与控制策略研究摘要:本论文旨在研究船舶建造项目的进度管理与控制策略,以提高项目执行的效率和质量。
首先,我们分析了船舶建造项目的特点和挑战,包括复杂的工程流程、资源调度难题以及技术创新的影响。
接着,我们探讨了传统进度管理方法的不足之处,并提出了一种基于现代项目管理理论的新策略,包括项目计划的优化、资源分配的智能化以及风险管理的强化。
最后,我们结合实际案例研究,验证了新策略在船舶建造项目中的可行性和效益。
研究结果表明,采用新策略可以有效提高项目的进度控制和管理水平,为船舶建造行业的可持续发展提供了有力支持。
关键词:船舶建造、进度管理、控制策略、项目管理、可持续发展。
引言:船舶建造项目作为复杂而具有挑战性的工程,在全球海洋产业中扮演着重要角色。
然而,如何有效地管理和控制这些项目的进度一直是一个备受关注的问题。
本论文旨在探讨船舶建造项目进度管理与控制策略,以提高项目执行效率和质量。
我们将深入分析船舶建造项目的独特特点,并介绍一种现代化的项目管理策略,该策略有望为船舶建造行业带来革命性的变革。
通过本研究,我们将揭示新策略的潜力,以满足未来海洋产业的不断增长需求。
一、船舶建造项目特点与挑战分析在分析船舶建造项目的特点与挑战时,我们可以从几个关键方面着手如图1所示。
图 1船舶建造流程的思维导图,突出了设计、规划、建造和测试等各个阶段的关键要素1、是工程流程的复杂性。
船舶建造是一个包含多个阶段的复杂过程,涉及设计、规划、建造和测试等环节。
每个环节都有其特定要求,如设计阶段需要创新思维,建造阶段则需注重细节和质量控制。
例如,在设计阶段,项目组可能需要评估超过100种不同的设计参数,从而确保船舶的功能和安全性。
2、资源调度是一个显著的挑战。
船舶建造需要大量的物质和人力资源。
例如,一个典型的中型船舶项目可能需要使用超过30,000吨的钢材和数千小时的工程师工作时间。
有效地管理这些资源对于控制成本和保证项目按时完成至关重要。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
船舶运动控制 已经成为智能 船舶自主控制 的核心
船舶运动控制很重要
现代航海对控制的要求
控制目标
稳
准
快
控制实践
节
经
简
落实到船舶运动控制领域,即是国际海事组织(IMO)新提 出的航海所追求的目标:“清洁海洋上安全、保安和高效的航 运 (Safe, Secure and Efficient Shipping on Clean Oceans)”,清洁海洋体现了经济;安全、保安体现了稳定; 高效的航运体现了准确、快速、节能、算法简单。
HLioghwssppeeeeddStmaabinliozeiunvgringCalmModerateHighExtreme
船舶运动控制的5类情况
大洋航行自动导航问题
速度
海洋环境条件
船舶运动镇定控制: 减摇、动力定位
自动化水平
无人水面船舶的控制
港区航行及自动靠离 泊问题
拥挤水道航行及大洋 航行的自动避碰问题
自动舵各种控制策略研究中最核心的问题在于寻求确定函
数f1,f2 的方ຫໍສະໝຸດ 并得到这两个函数的最终结果。确定函数f1, f2 的方法比较多,八仙过海、各显神通。
船舶运动控制研究的基本问题
船舶动态具有大惯性特点,万吨级油轮的时间常数可 达百秒以上,对操舵的响应缓慢,其控制更为困难。
在操舵伺服子系统中存在着饱和、时滞和继电器特性 等非线性因素,这些是采用某些线性控制理论所设计的自 动舵控制算法之效果与研究者的期望相差甚远的根本原因。
显然,这是研究者追求的最终目标!
船舶自动舵研究的发展趋势
智能船舶的核心控制技术是导航的智能化, 体现在自动舵上就是使船舶操纵控制更智能化、 更容易化、更网络化。因此自动舵研究将朝着 算法先进化、功能综合化、实现网络化、使用 简单化和装备国产化5个方向发展。
大洋航行的自动导航(我们的研究)
原来靠航海经验,现在通过理论计算。
基于动态虚拟船 形的制导算法
原理
YE
Real ship
Dynamical virtual ship
Guidance virtual ship
Wi1
Wi1 Wi
OE
XE
自动避碰(我们的研究) 6级海况下仿真测试 (11个静态障碍物、7条船)
建立一个简单数学模型,然后做回转实验,与实船的结果符合度为86.7%。
控制的基础是数学模型
船舶建模与控制实例
育鲲
建立一个简单数学模型,然后做回转实验,与实船的结果符合度为88.1%。
简单数学模型精度 不高,用于控制器 设计尚可,用于航 海模拟器的数学模 型要用复杂的数学 模型!
船舶自动舵
船上保持航向和航迹的控制设备
航迹保持要求用舵角 δ 克服环境干扰把船舶的运动轨迹维
持在设定航迹上,这时不但要消除航迹误差 η,而且要消除航
向误差 Δψ = ψr - ψ 。
δ = f2 (Δψ,r,η)
船舶自动舵
船舶自动操舵仪 航向保持: 航迹保持:
δ = f1(Δψ,r)
δ = f2 (Δψ,r,η)
不能只是与众不同, 还要更稳、更准、更 快、更节能、更经济、 更简单!
2维波谱环境下的机理波浪(方 向谱、频率谱)
无人船及自主靠泊(我们的研究)
自
自
主
主
靠
避
泊
障
中国船级社编制发布《智能船舶规范》
• 由中国船级社(CCS)编制的《 智能船舶规范》在中国国际海 事会展期间正式对外发布, 2016年3月1日生效。
• 《智能船舶规范》中定义:“ 智能船舶指利用传感器、通信 、互联网等技术手段,自动感 知信息和数据,并通过自动控 制技术和大数据处理分析技术 来实现智能化运行。”
客观世界是复杂、多变的,不存在没有不确定性、干扰、 不精确性的被控过程及量测手段。
船舶运动控制研究的基本问题
一个控制器如果能够在被控过程存在不确定性、 干扰及量测不精确性条件下使闭环控制系统稳定,称 该系统具有鲁棒稳定性(Robust Stability);
若在此基础上系统同时满足规定的性能指标,则 称之为具有鲁棒性能(Robust Performance)。
船舶运动控制研究的基本问题
一 个 控 制 器 如 果 在 被 控 过 程 处 于 标 称 条 件 (Nominal condition)下(即过程模型不存在不确定性、环境无干扰、 量测无误差)使闭环控制系统稳定,则称该系统具有标称稳 定性;
如果此时闭环系统的动态性能也满足规定的要求(例如满 足最大超调量和调节时间等要求),称该系统具有标称性能。
船舶运动控制新进展
船舶运动控制很重要
海上航行充满了风浪雾礁的危险,如何科学地操纵和控制船舶,使之 安全、准时到达目的港,是一个生命攸关影响重大的问题。
为了掌握船舶运动规律和船舶驾控技术,人类已经奋斗了多个世纪。
手动发展到自动
单个系统的自动化提高到 综合自动化
简单的控制装置发展成 计算机化、网络化的体系结构
航速变化和装载增减最终导致船舶运动数学模型的参 数甚至结构产生摄动(Perturbation),这就是研究者甚 感棘手的不确定性。
船舶运动控制研究的基本问题
风、浪、流的存在从实质上讲也会转换成船舶模 型的参数和结构的摄动,即干扰同样引起不确定性。
在对船舶运动进行闭环控制时,获得反馈信息的 量测手段也不可能是完善的,一些重要的量测数据例 如航向、船位等都有一定的误差,后者呈现为一种随 机噪声,因而我们不得不面对量测信息的不精确性。
程和自动驾驶船舶非常重要,这将决定船舶在接收到 传感信号后如何做出反应、采取何种行动; • 第三是对通讯和互联的探索,自动船舶仍然需要来自 岸上的指令,因而保证岸上操作人员和船舶的沟通也 很重要。
控制的基础是数学模型
船舶建模与控制实例
育鹏(大连海事大学最新3万吨实习船,2017.5首航,3.4亿元)
无人船的3大关键技术
• 英国双罗公司副总裁Oskar Levander:未来如何能 够将无人驾驶船技术与船舶环境高度融合?
• 基于以下3大技术进行探索。 • 首先是对传感器融合的探索,目前传感技术发展已相
当成熟,并被用于诸多自动驾驶交通工具的运行。 • 其次是对控制算法的探索,安全航行和避免碰撞对远
船舶自动操舵仪
δ = f1(Δψ,r)
N(北)
r
r
x
y
r
航向 自动舵
干扰
图1 航向保持问题图
船上保持航向和航迹的控制设备
船舶自动舵
船舶自动操舵仪
如果取 δ 与Δψ 和 r 成线性关系,就得到比例-微分(PD)
舵,这是广泛应用的一种控制律,可初步满足通常情况下的航 向保持要求。为提高控制性能,必须引用各种先进的控制策略。