1-光学设计.
单透镜
一.实验目的
1.学习如何在ZEMAX 里键入系统参数,包括设罝系统孔径(System Aperture)、透镜单位(Lens Units)、以及波长范围(Wavelength Range),并且进行优化
2. 学习使用光线扇形图(Ray Fan Plots)、弥散斑(Spot Diagrams)以及其它的分析工具来评估系统性能。
二.实验要求
设计一个焦距187 mm 、F/5.9的单透镜镜头,材料为BK7 (薄透镜焦距12
111(1)()n f R R =--,d 光的n=1.516800,),并且使用轴上(On-Axis)的可见光进行分析。
三.实验步骤
1)设罝系统孔径
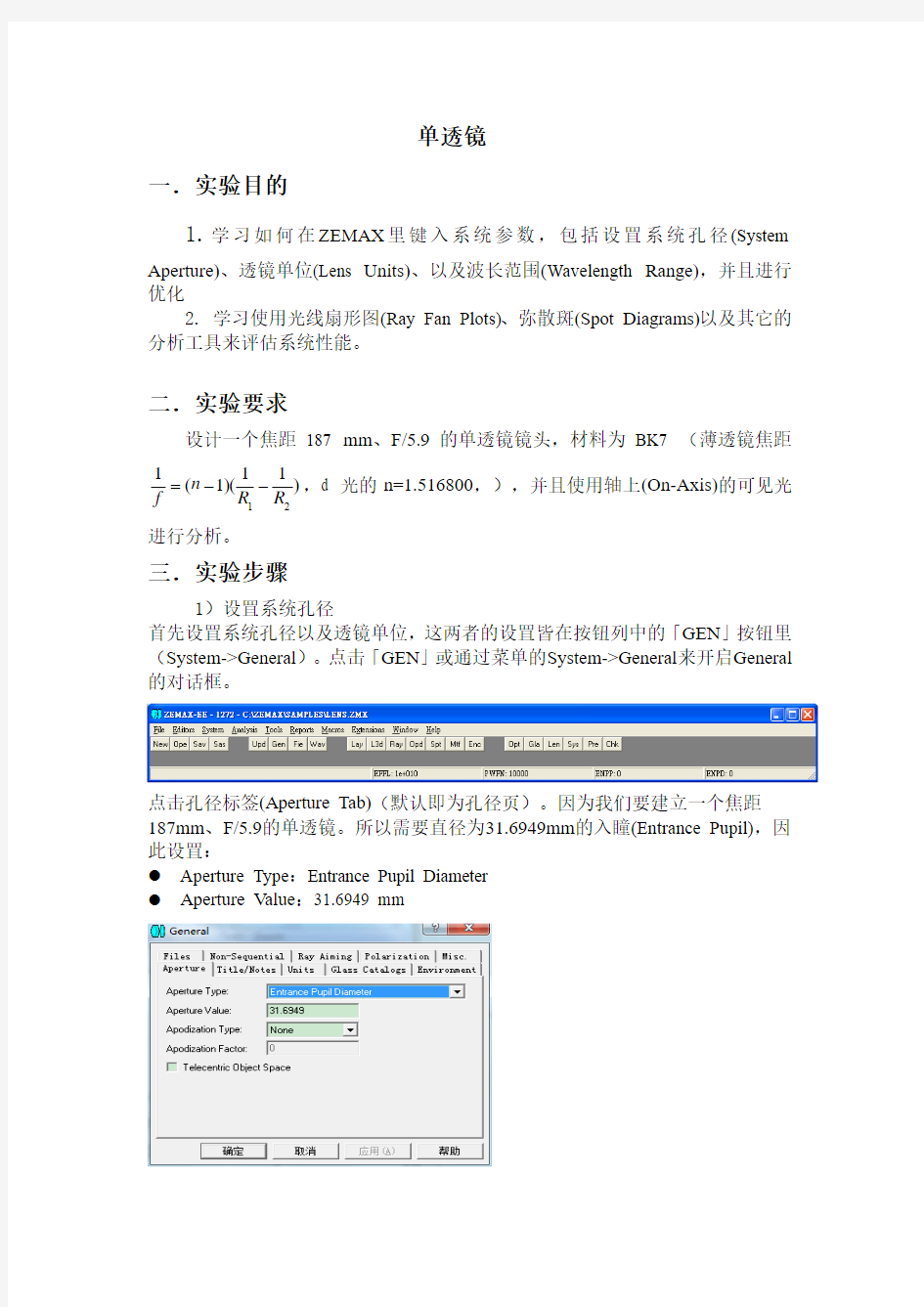
首先设罝系统孔径以及透镜单位,这两者的设罝皆在按钮列中的「GEN 」按钮里(System->General )。点击「GEN 」或通过菜单的System->General 来开启General 的对话框。
点击孔径标签(Aperture Tab)(默认即为孔径页)。因为我们要建立一个焦距187mm 、F/5.9的单透镜。所以需要直径为31.6949mm 的入瞳(Entrance Pupil),因此设罝:
● Aperture Type :Entrance Pupil Diameter
● Aperture Value :31.6949 mm
点击单位标签(Units Tab),并确认透镜单位为Millimeters。单击「确认」来离开对话框。
2)设罝视场角
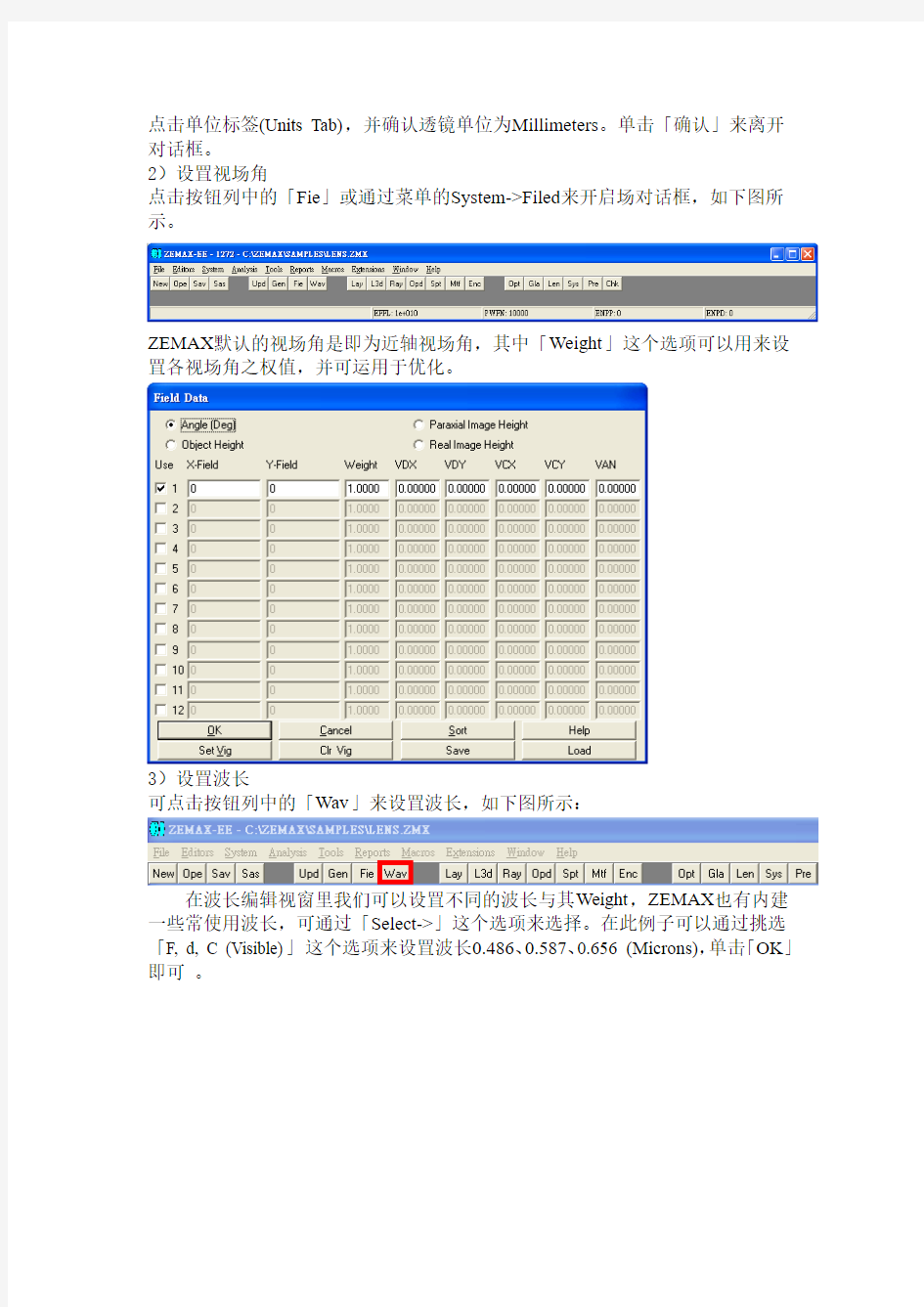
点击按钮列中的「Fie」或通过菜单的System->Filed来开启场对话框,如下图所示。
ZEMAX默认的视场角是即为近轴视场角,其中「Weight」这个选项可以用来设罝各视场角之权值,并可运用于优化。
3)设罝波长
可点击按钮列中的「Wav」来设罝波长,如下图所示:
在波长编辑视窗里我们可以设罝不同的波长与其Weight,ZEMAX也有内建一些常使用波长,可通过「Select->」这个选项来选择。在此例子可以通过挑选「F, d, C (Visible)」这个选项来设罝波长0.486、0.587、0.656 (Microns),单击「OK」即可。
4)键入透镜资料
现在我们要键入Lens的参数。在ZEMAX是通过设罝依序排列的表面来建立出光学系统。在此建立单透镜这个例子需要建立4个表面。
● The object surface(OBJ):设罝光线的起始点
● The front surface of the lens(STO):光线进入Lens的位置。在这例子里,这表面的位置也决定了光阑(Stop)的位置
● The back surface of the lens(2):光线从Lens出来并进入空气中的位置。
● The image surface(IMA):光线追迹最后停止的位置,不可以在IMA这个之后设罝任何的表面。这个位置上并非存真实的表面,而是一个哑的表面。
默认的LDE视窗中只有3表面(3列),为了符合此例子需要增加一个表面。将游标移到「IMA」并按下按键盘上的Insert键,即可产生「2」这个面。
「OBJ」是第0面,「STO」是第1面,「2」是第2面、「IMA」是第3面。
5)设罝透镜参数
首先设罝Lens的材料为「BK7」,将游标移到第1面的Glass栏,键入BK7并按Enter。而此时ZEMAX便会去查寻数据库里BK7的光学属性,来决定其各个波长下之折射率。
Lens的厚度由第1面的Thickness栏来设罝,这个栏是指表面的中心点沿着光轴到下一个表面的距离。孔径31.6949mm厚度5.9mm的Lens是合理的,直接在「Thickness」栏内键入数值即可。
接下来键入Lens的曲率半径,本例子使用一个左右曲率对称的Lens,先将第
1面的曲率半径设罝为187 mm,第2面的曲率半径设罝为-187 mm。在第1面及第2面的「Radius」栏键入数据,正值表示曲率中心点在表面的右边,负值表示曲率中心点在表面的左边。
「IMA」的位置就是设在Lens的焦距上,所以距离Lens大约187 mm左右,直接在第2面「2」的「Thickness」栏键入187,即表示在Lens后面187 mm的位置就是下一表面的位置,也就是「IMA」面的位置。
LDE的设罝如下所示:
6)评估系统性能
在ZEMAX中有很多分析功能可评估系统的质量好坏,其中一个最常用的分析工具是光线扇形图(Ray fan plot)。可以点击「Ray」这个按钮或通过菜单Analysis->Fans->Ray Aberration来开启这个功能。
在点击之后会出现一个视窗,显示各光线与主光线(Chief Ray)的光线象差(Ray aberrations),左边的图是显示Y或正切方向的光线象差,右边的图是显示X 或弧矢方向的光线象差。
这个分析图表是以0.587 microns为主波长,其线型在原点附近斜率不为零,表示产生离焦现象(Defocus)。
7)使用解
为了定标离焦(Defocus),通过调整第2面「2」到IMA面的距离(焦距=187mm)来解决这个问题。Solves是一个特别的功能,主要是针对特定ZEMAX的参数进行动态调整,以符合某些特别的情况
先要点击第2面的Thickness后,单击鼠标右键,将会出Solve的设罝视窗。
在「Solve Type」里选择Marginal Ray Height,然后敲点「OK」即可发现LDE 视窗第2面的「Thickness」会出现「M」的记号。在次点击「Ray」这个选钮显示
光线扇形图(Ray fans plot),可发现像差线条已由原本的斜线变为S的形状,而这
表示此Lens有球差(Spherical aberration)。
8)查看系统报告
点击视窗内「sys」快捷按钮,或通过Reports->systerm data来查看系统报告
9)设罝优化
我们希望使用优化来修正这个例子的质量。除基本设计的形式之外,优化需要两个附加项:
● 设罝允许变动的参数,让ZEMAX可自由地在允许的范围内调整这个参数,以设计出更好系统。
● 在数学上的观点上,需要设罝优化函数(Merit function)的描述,意即评估系
统优劣的指标。
这个例子内有3个参数适合被改变而来进行优化,包括两个表面的曲率半径以及透镜到「IMA」面的距离。只要将游标移至第1面「STO」及第2面「2」的「Radius」栏及第2面的「Thickness」栏点击并按Ctrl+Z或按鼠标右键选,在「Solve Type」选Variable这个选项。如此各个选项之后将出现「V」的字样。
9)建立优化评价函数
优化函数(Merit function)被定义于优化函数编辑器(Merit function Editor, MFE)。单击键盘的F6或点击菜单的Editors->Merit Function即可开启编辑视窗(MFE)。
从MFE 点击Tools->Default Merit Function会出现一个Default Merit Function 的视窗,点击「Reset」后再点击「OK」。后面我们还会说明这个视窗的相关设罝,现在先以默认条件进行优化。
10)增加限制条件
接着修正优化评价函数(Merit function),包括系统焦距的需求。将游标移在
MFE的第一列并单击按键盘的Insert来产生新的一列,在此列的Type栏上键入EFFL后按Enter。这个操作数的功能是在运算出系统有效焦距,在计算有效焦距时必须设罝参考的主波长(Primary Wavelength),在此例子里使用第二波长为参考
波长,所以在第一列的「Wav#」栏中键入为2。接着在「Target」栏里键入187并按Enter,「Weight」设为1再按Enter,最后将此视窗关闭,虽然关闭编辑视窗但设罝已储存,并不会遗失。
11)运行优化
点击「Opt」或Tools->Optimizatio n,便会出现Optimization的视窗。
在优化的对话视窗里,如果「Auto Update」选项被勾选,则当在运行优化时,所有开启的分析视窗如Ray fans plot以及LDE的数据将及时变动。在此请点击「Automatic」这个按钮来进行优化。
12)光线扇形图
这个优化的动作是调整Lens的曲率半径使透镜焦距接近187mm,并调整透镜与成像面的距离,以消除离焦(Defocus)。其是利用最小波前误差之均方根值为依据进行优化,而此次的优化的并没有使焦距完完全全等于187 mm,这是因为我们所设罝的有效焦距操作数(EFFL)只是评价函数(Merit function)中众多操作数的一项而已,所以在运行优化时也需要符合其它优化条件。其实在许多的设计之中,可以通过LDE里Solve功能来使调整焦距以符合设计需求,而不需使用MFE的操作数。
下图所示是经过优化后的光线扇形图(Ray fans plot),其最大像差(Maximum Aberration)约为300 microns。
13)二维设计图
点击Analysis->Layout或点「Lay」这个选项便可以显示2D设计图(Layout)。此2D设计图的视窗上点击Settings->Number of Rays->7->OK即可显示出如下之图。
14)点列图
在ZEMAX众多的分析工具里,除了常使用光线扇形图来分析设计系统的光学性能之外,另外也有一个分析功能-点列图(Spot Diagrams)也是一个相当常用的分析图表。点列图(Spot Diagrams)可以显示出平行光束通过光学系统后聚焦于成像面上的斑点。可点击Analysis->Spot Diagram->Standard或点击「Spt」即可显示出光斑(Spot Diagrams)的分析图。
如下图所示,可由图表判断其Stop的图表大约有200 microns的半径大小,而Airy Disk有5.7 mircons。也可以由此图看出整个系统的像差,由于不同的波长其焦距点也不一样,所以其成像会产生模糊现象。
15)光程差扇形图
另一个常用的分析工具是OPD Fans,这个图是显示光程差(Optical Path Difference),此图与光线扇形图一样采用主光线(Chief ray)为参考光,显示光离开光瞳(Exit Pupil)后的光程差。可点击Analysis->Fans->Optical Path或点「Opd」即可显示光程差扇形图(OPD Fans Plot)。
16)进一步分析
这个设计够好了吗?当波前像差(Wavefront Aberration)小于1/4的波长时,则需考虑到透镜的衍射极限(Diffraction Limited)。在此例子还不需要考虑到衍射极限。为了改善系统的光学性能,设计者都必须了解光学系统中那一些像差限制了系统的光学性能,以及要进行什么修正才可以有效的处理像差问题。
在这一次的设计中,优化后仍然有轴向色差(Axial Color Aberration)及球差
(Spherical Aberration)。如果在光线扇型图(Ray Fan Plot)中发现原点部分的曲线斜率不为零(即系统含有离焦),这是因为优化的过程ZEMAX通过近轴焦点(Paraxial Focus)的移动来补偿球差,以达到最小的球差(Spherical Aberration)。
就色差(Chromatic Aberration)而言,焦距的变动是随波长而异,可以在Chromatic Focal Shift Plot看出来。点击Analysis->Miscellaneous->Chromatic Focal Shift,而分析图是显示出波长与焦距位移的关系图。
四.实验结果
优化前
光线扇形图
二维设计图
点列图
光程差扇形图
分析图是显示出波长与焦距位移的关系图
优化后
光线扇形图
二维设计图
点列图
光程差扇形图
分析图是显示出波长与焦距位移的关系图
工程光学设计
摘要 摘要:设计三片库克照相物镜,给出三片镜子的结构参数按照设计要求合理设计。近轴光路追迹求出设计系统的焦距和后焦距。然后利用zemax光学设计软件仿真验证设计结果。 关键词:照相物镜;光学设计 设计要求: 设计要求:采用三片库克(cookie)结构,D/f=1/5,半像面尺寸:18mm 半视场角:20°设计波长:0.486um、0.587um、0.656um,口径D:10mm 计算:系统焦距f,,后焦距(BFL) 第一章绪论 我们设计光学系统采用光线模型方法,即利用几何光学和光学工程中涉及到的基本方法、基本公式设计三片库克照相物镜。利用光线模型设计光学系统是非常重要的方法。曾经有位美国学者在回答有关光线和波动理论应用问题时,睿智的说;“你用光线理论设计照相机镜头,尽管是近视理论,但你用一个星期可以完成;然而你若用衍射理论设计照相机镜头,虽然你用的理论很严格,也去你一辈子才能设计出一个镜头。”可见用几何光学和工程光学中的光线模型设计光学系统是多么的重要。而近轴光线的追迹公式又是利用光线理论设计光学系统的基础。 根据近轴光学公式的性质,它只能适用于近轴区域,但是实际使用的光学仪器,无论是成像物体的大小,或者由一物点发出的成像光束都要超出近轴区域。 这样看来,研究近轴光学似乎没有很大的实际意义。但是事实上近轴光学的应用并不仅限于近轴区域内,对于超出近轴区域的物体,仍然可以使用近轴光学公式来计算平面的位置和像的大小。也就是说把近轴光学公式扩大应用到任意空间。对于近轴区域以外的物体,应用近轴光学公式计算出来的像也是很有意义的: 第一,作为衡量实际光学系统成像质量的标准。根据共轴理想光学系统的成像性质:一个物点对应一个像点;垂直于光轴的共轭面上放大率相同。如果实际共轴球面系统的成像符合理想则该理想像的位置和大小必然和用近轴光学公式计算所得结果相同。因为它们代表了实际近轴光线的像面位置和放大率。如果光学系统成像不符合理想,当然就不会和近轴光学公式计算出的结果一致。二者间的差异显然就是该实际光学系统的成像性质和理想像间的误差。也就是说,可以用它作为衡量该实际光学系统成像质量的指标。因此,通常我们把用近轴光学公式计算出来的像,称为实际光学系统的理想像。 第二,用它近似地表示实际光学系统所成像的位置和大小。在设计光学系统或者分析光学系统的工作原理时,往往首先需要近似地确定像的位置的大小。能够满足实际使用要求的光学系统,它所成的像应该近似地符合理想。也就是说,它所成的像应该是比较清晰的,并且物像大体是相似的。所以,可以用近轴光学公式计算出来的理想像的位置和大小,近似地代表实际光学系统所成像的位置和大小。由此可见近轴光学系统具有重要的实际意义,它在今后的研究光学系统的成像原理时经常用到。
(整理)各种光学设计软件介绍-学习光学必备-peter.
光学设计软件介绍 ZEMAX是美国焦点软件公司所发展出的光学设计软件,可做光学组件设计与照明系统的照度分析,也可建立反射,折射,绕射等光学模型,并结合优化,公差等分析功能,是套可以运算Sequential及Non-Sequential的软件。版本等级有SE:标准版,XE:完整版,EE:专业版(可运算Non-Sequential),是将实际光学系统的设计概念、优化、分析、公差以及报表集成在一起的一套综合性的光学设计仿真软件。ZEMAX的主要特色:分析:提供多功能的分析图形,对话窗式的参数选择,方便分析,且可将分析图形存成图文件,例如:*.BMP, *.JPG...等,也可存成文字文件*.txt;优化:表栏式merit function参数输入,对话窗式预设merit function参数,方便使用者定义,且多种优化方式供使用者使用;公差分析:表栏式Tolerance参数输入和对话窗式预设Tolerance参数,方便使用者定义;报表输出:多种图形报表输出,可将结果存成图文件及文字文件。 CODE V是Optical Research Associates推出的大型光学设计软件,功能非常强大,价格相当昂贵CODE V提供了用户可能用到的各种像质分析手段。除了常用的三级像差、垂轴像差、波像差、点列图、点扩展函数、光学传递函数外,软件中还包括了五级像差系数、高斯光束追迹、衍射光束传播、能量分布曲线、部分相干照明、偏振影响分析、透过率计算、一维物体成像模拟等多种独有的分析计算功能。是世界上应用的最广泛的光学设计和分析软件,近三十多年来,Code V进行了一系列的改进和创新,包括:变焦结构优化和分析;环境热量分析;MTF和RMS波阵面基础公差分析;用户自定义优化;干涉和光学校正、准直;非连续建模;矢量衍射计算包括了偏振;全球综合优化光学设计方法。 CODE V是美国著名的Optical Research Associates(ORA?)公司研制的具有国际领先水平的大型光学工程软件。自1963年起,该公司属下数十名工程技术人员已在CODE V程序的研制中投入了40余年的心血,使其成为世界上分析功能最全、优化功能最强的光学软件,为各国政府及军方研究部门、著名大学和各大光学公司广泛采用1994年,ORA公司聘请北京理工大学光电工程系为其中国服务中心。与国际上其它商业性光学软件相比,CODE V的优越性突出地表现在以下几个方面: 1.CODE V可以分析优化各种非对称非常规复杂光学系统。这类系统可带有三维偏心或倾斜的元件;各类特殊光学面如衍射光栅、全息或二元光学面、复杂非球面、以及用户自己定义的面型;梯度折射率材料和阵列透镜等等。程序的非顺序面光线追迹功能可以方便地
(完整版)光学系统设计(一)答案
光学系统设计(一) 参考答案及评分标准 20 分) 二、填空题(本大题14小题。每空1分,共20 分) 21.球心处、顶点处、齐明点处(r n n n L '+=) 22.%100y y y q z ?''-'=' 23.0 24.球差 25.冕牌、火石 26.?ννν?2111-=、?ννν?2 122--= 27.两面的公共球心处、两面的公共球心处 28.阿贝常数、C F D D n n 1n --= ν 29.畸变 30.圆 31.0 32.二级光谱 33.f 00052.0L FCD '='? 34.EFFL 三、名词解释(本大题共5 小题。每小题2 分,共 10 分) 35.像差:实际光学系统所成的像和近轴区所成的像之间的差异称为像差。 评分标准:主要意思正确得2分。 36.子午场曲:某一视场的子午像点相对于高斯像面的距离称为子午像面弯曲,简称子午场曲。 评分标准:答对主要意思得2分。 37.二级光谱:如果光学系统已对两种色光校正了位置色差,这两种色光的公共像点相对于第三种色光的像点位置仍有差异,该差异称为二级光谱。 评分标准:答对主要意思得2分。 38.色球差:F 光的球差和C 光的球差之差,称为色球差,该差值也等于边缘光和近轴光色差之差。 评分标准:答对得2分。 39.渐晕:轴外点成像光束的宽度较轴上点成像光束的宽度要小,造成像平面边缘部分照度要比像平面中心部分照度低的现象,称为渐晕。 评分标准:答对主要意思得2分。
四、简答题(本大题共 6 小题。每小题 5 分,共30 分) 40.一物体的峰-谷比(peak to valley )是λ23.0,问是否满足Rayleigh 条件? 答:满足Rayleigh 条件,因为根据Rayleigh 判断,实际波面和参考波面之间的最大波像差(峰谷比)不超过0.25λ时,此波面可看作是无缺陷的成像质量较好。 评分标准:答对主要意思得5分。 41.在七种几何像差中,仅与孔径有关的像差有哪些?仅与视场有关的像差有哪些?与视场和孔径都有关系的又有哪些? 答:仅与孔径有关的像差有:球差、位置色差;仅与视场有关的像差有:像散、场曲、畸变、倍率色差;与视场和孔径都有关系的有:彗差 评分标准:第一问中每个答案正确得1分,第二问中每个答案正确得0.5分,第三问中每个答案正确得1分。 42.一物体置于折射球面的球心处,其像在哪?放大倍率多少?若物在球面顶点,其像又在何位置?放大倍率多少? 答:像分别在球心处和顶点处,放大倍率分别为n 1和1。 评分标准:两位置答对各得1分,第一个放大倍率答对得2分,第二个得1分。 43. 什么是焦深,若像面向前或向后离焦半倍焦深,引起的波像差多大? 答:(1)实际像点无论在高斯像点之前或之后'?0l 范围内,波像差都不会超过1/4 波长,所以把'02l 定义为焦深,即20u n l 2''='λ (2)引起的波像差为4/λ。 评分标准:第一问答对大意得3分,第二问答案正确得2分。 44. 近视眼应佩戴何种透镜加以矫正?为什么? 答:应佩戴凹透镜加以矫正,使光线经过水晶体后发散,重新汇聚到视网膜上。 评分标准:答对大意得5分。 45. 在对称式光学系统中,当1-=β时,哪几种初级像差可以得到自动校正?其它初级像差有何特性? 答:垂轴像差:彗差、畸变、倍率色差均为0。 轴向像差:球差、像散、场曲、位置色差均为半部系统相应像差的两倍。 评分标准:第一问每个答案正确得1分,共3分;第二问每个答案正确得0.5分,共2分。 五、计算题(每题10分,共20分) 46.设计一齐明透镜,第一面曲率半径95m m r 1-=,物点位于第一面曲率中心处,第二球面满足启明条件,若该透镜厚度5mm d =,折射率5.1n =,该透镜位于空气中,求 (1)该透镜第二面的曲率半径; (2)该启明透镜的垂轴放大率。 解: (1)根据题意得,物点发出光线经第一面后按直线传播,相对于第二面,其物距100m m 595l 2-=--=,根据齐明条件100mm r n n n l 22 222-='+=,可得
光学设计报告
湖北第二师范学院《光学系统设计》 题目:望远镜的设计 姓名:刘琦 学号:1050730017 班级:10应用物理学
目录 望远系统设计............................................................................................... 第一部分:外形尺寸计算 .......................................................................... 第二部分:PW法求初始结构参数(双胶合物镜设计) ....................... 第三部分:目镜的设计 .............................................................................. 第四部分:像质评价 .................................................................................. 第五部分心得体会 ..................................................................................
望远镜设计 第一部分:外形尺寸计算 一、各类尺寸计算 1、计算'f o 和'f e 由技术要求有:1 '4 o D f = ,又30D mm =,所以'120o f mm =。 又放大率Γ=6倍,所以' '206o e f f mm ==。 2、计算D 出 30 3056 D D D mm =∴= = =Γ物出物 3、计算D 视场 2'2120416.7824o o D f tg tg mm ω==??=视场 4、计算'ω(目镜视场) ''45o tg tg ωωωΓ?=?≈ 5、计算棱镜通光口径D 棱 (将棱镜展开为平行平板,理论略) 该望远系统采用普罗I 型棱镜转像,普罗I 型棱镜如下图: 将普罗I 型棱镜展开,等效为两块平板,如下图:
总体设计方案
总体设计方案
1.引言 1.1. 编写目的 本文档为支付平台总体概要设计说明。 概要设计说明书编制的目的是说明对程序系统的设计考虑,包括程序系统的基本处理流程、程序系统的组织结构、模块划分、功能分配、接口设计、运行设计、数据结构设计和出错处理设计等,为程序的详细设计提供基础。 本文档读者以开发人员为主,其他项目相关人员也可参考。 1.2. 定义 参考《词汇表》。 1.3. 参考资料 技术方面主要参考资料: 1)Spring资料 2)iBatis资料 3)Hessian资料 4)W3C XML相关规范 2.总体设计 遵循的技术标准 ?本系统软件基于J2EE规范进行开发; ?本系统软件采用Spring架构及iBatis数据库操作框架。
?证书应用采用符合CSP规范的证书应用体系; ?基于PKI的安全认证和加密规范系列:PKCS#1v2、PKCS#7v1.5、 SSL3.0/TLS1.0; ?交易报文采用W3C XML规范、以及相关的XML Schema、XML Signature and Encryption规范; ?采用HAP2.0作为应用开发技术平台; ?采用HADP2.0作为项目开发流程规范; ?Web客户支持Microsoft IE6.0及以上版本、FireFox3.0及以上版本; ?通联基金支付系统与支付网关系统通讯采用Hessian技术; ?JAVA SUN JDK 1.4.2、J2EE 1.3。 2.1. 子系统设计 本章节的主要定义子系统、子系统标识符、子系统的功能、以及子系统之间的关系。 2.1.1. 子系统说明
2.1.2. 子系统关系说明 ?APP层使用数据库1存储数据; ?支付交互控制子系统把交易结果通知内容存放在数据库2中; ?通知服务器从数据库2中提取交易结果通知内容并转发; ?银行接口系统使用数据库3记录银行交易流水; ?APP层通过文件服务器与银行接口系统交换文件。
光学系统设计
光学系统设计(五) 一、单项选择题(本大题共 20小题。每小题 1 分,共 20 分) 在每小题列出的四个备选项中只有一个是正确的,请将其代码填写在题后的括号内。错选、多选或未选均无分。 1.对于密接双薄透镜系统,要消除二级光谱,两透镜介质应满足 ( )。 A.相对色散相同,阿贝常数相差较小 B.相对色散相同,阿贝常数相差较大 C.相对色散相差较大,阿贝常数相同 D.相对色散相差较小,阿贝常数相同 2.对于球面反射镜,其初级球差表达公式为 ( )。 A.?δ2h 81L =' B. ?δ2h 81L -=' C. ?δ2h 41 L =' D. ?δ2 h 41 L -=' 3.下列光学系统中属于大视场大孔径的光学系统是 ( )。 A.显微物镜 B.望远物镜 C.目镜 D. 照相物镜 4.场曲之差称为 ( )。 A.球差 B. 彗差 C. 像散 D. 色差 5.初级球差与视场无关,与孔径的平方成 ( )。 A.正比关系 B.反比关系 C.倒数关系 D.相反数关系 6.下面各像差中能在像面上产生彩色弥散斑的像差有( )。 A.球差 B.场曲 C.畸变 D.倍率色差 7.不会影响成像清晰度的像差是 ( )。 A.二级光谱 B.彗差 C.畸变 D.像散 8.下列光学系统中属于大视场小孔径的光学系统是 ( )。 A.显微物镜 B.望远物镜 C.目镜 D. 照相物镜 9.正弦差属于小视场的 ( )。 A.球差 B. 彗差 C. 畸变 D. 色差 10.初级子午彗差和初级弧矢彗差之间的比值为 ( )。 :1 :1 C.5:1 :1 11.光阑与相接触的薄透镜重合时,能够自动校正 ( )。 A.畸变 B.场曲 C.球差 D.二级光谱 12.在子午像差特性曲线中,坐标中心为z B ',如0B '位于该点左侧,则畸变值为 ( )。 A.正值 B.负值 C.零 D.无法判断 13.厚透镜之所以在校正场曲方面有着较为重要的应用,是因为 ( )。 A.通过改变厚度保持场曲为零 B.通过两面曲率调节保持光焦度不变 C.通过改变厚度保持光焦度不变 D.通过两面曲率调节保持场曲为0 14.正畸变又称 ( )。 A.桶形畸变 B.锥形畸变 C.枕形畸变 D.梯形畸变 15.按照瑞利判断,显微镜的分辨率公式为 ( )。 A.NA 5.0λσ= B. NA 61 .0λ σ= C.D 014' '=? D. D 012' '=? 16.与弧矢平面相互垂直的平面叫作 ( )。 A.子午平面 B.高斯像面 C.离焦平面 D.主平面 17.下列软件中,如今较为常用的光学设计软件是 ( )。 软件 软件 软件 软件 18.光学传递函数的横坐标是 ( )。 A.波长数 B.线对数/毫米 C.传递函数值 D.长度单位 19.星点法检验光学系统成像质量的缺陷是 ( )。
光学设计cad简答题
1.2光学系统有哪些特性参数和结构参数? 特性参数:(1)物距L(2)物高y或视场角ω(3)物方孔径角正弦sinU或光速孔径角h(4)孔径光阑或入瞳位置(5)渐晕系数或系统中每一个的通光半径 结构参数:每个曲面的面行参数(r,K,a4,a6,a8,a10)、各面顶点间距(d)、每种介质对指定波长的折射率(n)、入射光线的位置和方向 1.3轴上像点有哪几种几何像差? 轴向色差和球差 1.4列举几种主要的轴外子午单色像差。 子午场曲、子午慧差、轴外子午球差 1.5什么是波像差?什么是点列图?它们分别适用于评价何种光学系统的成像质量? 波像差:实际波面和理想波面之间的光程差作为衡量该像点质量的指标。适用单色像点的成像。 点列图:对于实际的光学系统,由于存在像差,一个物点发出的所有光线通过这个光学系统以后,其像面交点是一弥散的散斑。适用大像差系统 2.1叙述光学自动设计的数学模型。 把函数表示成自变量的幂级数,根据需要和可能,选到一定的幂次,然后通过实验或数值计算的方法,求出若干抽样点的函数值,列出足够数量的方程式,求解出幂级数的系数,这样,函数的幂级数形式即可确定。像差自动校正过程,给出一个原始系统,线性近似,逐次渐进。 2.2适应法和阻尼最小二乘法光学自动设计方法各有什么特点,它们之间有什么区别? 适应法:参加校正的像差个数m必须小于或等于自变量个数n,参加校正的像差不能相关,可以控制单个独立的几何像差,对设计者要求较高,需要掌握像差理论 阻尼最小二乘法:不直接求解像差线性方程组,把各种像差残量的平方和构成一个评价函数Φ。通过求评价函数的极小值解,使像差残量逐步减小,达到校正像差的目的。它对参加校正的像差数m没有限制。 区别:适应法求出的解严格满足像差线性方程组的每个方程式;如果m>n或者两者像差相关,像差线性方程组就无法求解,校正就要中断。 3.1序列和非序列光线追迹各有什么特点? 序列光线追迹主要用于传统的成像系统设计。以面作为对象,光线从物平面开始,按照表面的先后顺序进行追迹,对每个面只计算一次。光线追迹速度很快。 非序列光线追迹主要用于需考虑散射和杂散光情况下,非成像系统或复杂形状的物体。 以物体作为对象,光线按照物理规则,沿着自然可实现的路径进行追迹。计算时每一物体的位置由全局坐标确定。非序列光线追迹对光线传播进行更为细节的分析,计算速度较慢。 3.2叙述采用光学自动设计软件进行光学系统设计的基本流程。 (1)建立光学系统模型: 系统特性参输入:孔径、视场的设定、波长的设定 初始结构输入:表面数量及序号、面行、表面结构参数输入 (2)像质评价 (3)优化:设置评价函数和优化操作数、设置优化变量、进行优化 (4)公差分析:公差数据设置、执行公差分析 3.3Zemax软件采用了什么优化算法? 构造评价函数:最小二乘法、正交下降法(非序列光学系统)4.1什么叫做第一辅助光线?什么叫做第二辅助光线? 第一辅助光线:由轴上物点A发出,经过孔径边缘的光线AQ 第二辅助光线:由视场边缘的轴外点B发出经过孔径光阑中心O的光线BP 4.2薄透镜组有哪些像差特性? 一个薄透镜组只能校正两种出击单色像差。光瞳位置对像差影响:球差与光瞳位置无关;慧差、像散与光瞳位置有关;光瞳与薄透镜组重合时,像散为一个与透镜组结构无关的常数,此时畸变等于零;薄透镜组的Petzval场曲近似为一与结构无关的常量。 4.3单透镜的像差特性参数与结构参数有什么关系? 与玻璃的折射率n,单透镜的形状Q有关。不能消色差 4.4如何进行双胶合透镜组结构参数的求解? 4.5举例说明满足光学系统消除场曲条件(Petzval)的几种结构形式。 正、负光焦度远离的薄透镜系统和弯月形厚透镜 5.1望远物镜有什么光学特性和像差特性? 相对孔径不大,视场较小。 轴向边缘球差,轴向色差和边缘孔径的正弦差不用校正到零而是等于指定值。 6.1显微物镜有什么光学特性和像差特性? 焦距短,视场小。相对孔径大。 球差、轴向色差、正弦差,以及孔径高级像差。 6.2显微物镜有哪些主要类型?各有什么特点? 消色差物镜:只校正轴上点的球差和轴向色差、正弦差,不校正二级光谱色差。 复消色差物镜:要求校正二级光谱色差。 平像场物镜:要求校正场曲、像散、垂轴色差等各种轴外像差。 平面场复消色差物镜:和平像场物镜相似,还要校正二级光谱色差。 7.1目镜设计有什么特点? 焦距短、相对孔径比较小、视场角大、入瞳和出瞳远离透镜组 目镜的结构一般比较复杂;像差校正以轴外像差为主;场曲一般不进行校正;最重要的是校正像散、垂轴色差;在目镜和物镜尽可能独立校正像差的前提下,进一步考虑它们之间的像差补偿关系;采
光学设计报告
光学设计课程报告 班级: 学号: 姓名: 日期:
目录 双胶合望远物镜的设计 (02) 摄远物镜的设计 (12) 对称式目镜的设计与双胶合物镜的配合 (20) 艾尔弗目镜的设计 (30) 低倍消色差物镜的设计 (38) 无限筒长的高倍显微物镜的设计 (47) 双高斯照相物镜的设计 (52) 反摄远物镜的设计 (62) 课程总结 (70)
双胶合望远物镜的设计 1、设计指标: 设计一个周视瞄准镜的双胶合望远物镜(加棱镜),技术要求如下:视放大率: 3.7?;出瞳直径:4mm ;出瞳距离:大于等于20mm ;全视场角:210w =?;物 镜焦距: ' =85f mm 物;棱镜折射率:n=(K9);棱镜展开长:31mm ;棱镜与物镜的 距离40mm ;孔径光阑为在物镜前35mm 。 2、初始结构计算 (1) 求 J h h z ,, 根据光学特性的要求4.728.142=== D h : 44.75tan 85tan ''=?=?=οωf y 0871 .0''==f h u 648.0'''==y u n J (2)计算平行玻璃板的像差和数 C S S S I I I I ,, 平行玻璃板入射光束的有关参数为 0871.0=u 0875.0)5tan(-=-=οz u 005 .1-=u u z 平行玻璃板本身的参数为 d=31mm ; n=; 1.64=ν 带入平行玻璃板的初级像差公式可得: 000665.01.51631-1.5163×0.0871×-3113 24 432-==--=I du n n S 0.0006682=(-1.005)×-0.000665=u u × =z I I I S S 000824.0087.05163.11.6415163.131122 22-=??-?-=--=I u n n d S C υ
MATLAB应用下的光学设计
课程设计说明书题目:MATLAB应用下的光学设计所属课程:应用光学 姓名: 学号: 班级: 指导教师:
中文摘要:本论文是在现有光学理论分析的基础上,利用MATLAB编程语言进行常见的光学仿真实验,旨在以一种更加直观的形式对现有理论和现象进行对比分析与研究。具体内容如下: (1)利用MATLAB绘制一个球面; (2)根据应用光学近轴光路计算公式,编写一个从轴上点光源发出的11条特征光线(u=±1.0, ±0.85, ±0.707, ±0.5, ±0.3,0)的近轴成像光线追迹;(3)利用过渡公式,设计一个透镜(由两个单球面组成),并画出其光线追迹图; (4)在2-3的基础上,编写实际光线的追迹,分析轴上物点的球差; (5)利用MATLAB的GUI(图形用户界面),设计一个可实时改变光路参数的GUI界面; (6)画出理想焦点附近的星点图,理解球差的存在; (7)用uitable函数以列表的形式给出参数和结果说明。 关键词:MATLAB;光线追迹;球差;GUI界面;unitable函数 Abstract:This thesis is based on the analysis of the existing theory of optical, using MATLAB programming language to simulate several kinds of familiar optical experiments. The purpose of it is to make comparative study and analysis of existing theory and phenomenon by a more intuitive form. Specific content as follows: (1) Using MATLAB to draw a spherical surface; (2) According to paraxial optical path calculation formula, write a program to draw 11 special paraxial light ray tracing from epaxial point light(u=±1.0, ±0.85, ±0.707, ±0.5, ±0.3,0 ). (3) Depend on transition formula, design a optical lens(include two single spherical surface) and drawing light ray tracing; (4) Based on 2 and 3, write a program about actual light ray tracing, and analyzing epaxial point’s spherical aberration; (5) According to MATLAB, design a GUI (Graphical User Interface) can change the parameters of optical path; (6) Understand the exist of spherical aberration by drawing comet around ideal focus; (7) Give the results and parameters in a list by uitable function. Key words:MATLAB; light ray tracing;spherical aberration; GUI; unitable function
光学设计与CAD
光学系统设计 (一) 一、单项选择题(本大题共20小题。每小题1分,共20分) 在每小题列出的四个备选项中只有一个是正确的,请将其代码填写在题后的括号内。错选、 多选或未选均无分。 1 .主光线与光轴所确定的平面叫做 ( B )。 A.弧矢平面B.子午平面C.焦平面D.像平面 2.共轴球面系统中,轴上点像差有 ( C )。 A.球差和彗差 B.球差和倍率色差 C.球差和位置色差 D.彗差和倍率色差 3?通常情况下观察像差时,除 0视场和边缘视场外,还应注意的一个视场为 A.0.707 视场 B. 0.5 视场 C. 0.3 视场 D. 0.85 4. F 光边缘光球差与 C 光边缘光球差之差也等于 (A A.边缘光和近轴光色差之差 C.F 光和C 光近轴光球差之差 5. 望远镜的放大率是指 (D )。 A.垂轴放大率 B.轴向放大率 C.角放大率 D. 视觉放大率 6. 下面各像差中能在像面上产生彩色弥散斑的像差有 A.球差 B. 场曲C.畸变 D. 倍率色差 7. 不会影响成像清晰度的像差是 (C )。 A.二级光谱 B.彗差 C.畸变 D.像散 &下列光学系统中属于大视场小孔径的光学系统是 A.显微物镜B.望远物镜 C.目镜D.照相物镜 9. 正弦差属于小视场的 ( A.球差 B. 彗差 C.畸变 D. 色差 10. 初级子午彗差和初级弧矢彗差之间的比值为 A.3 : 1 B.4 : 1 C.5 : 1 D.2 : 1 11. 下列光学元件中,任何情况下都不会产生场曲的是 A.厚凸透镜B.平行平板 C.球面反射镜 D. 12. 下面光学元件中不产生色差的是 ( A A.球面反射镜 B. 薄凸透镜 C.薄场镜 D. 13 .薄双胶合物镜置于球面反射镜球心,光阑与球心重合, (D A. 0.4 B. 0.25 C. 0.1 14.场景置于系统中,除产生场曲外, 像散 C 视场 (A )。 B. 边缘光和近轴光球差之差 D. F 光和C 光近轴光色差之差 ( 不晕透镜 薄双胶合物镜 则系统彗差最小可以为 A.球差 B.彗差 C. 15. 厚透镜的场曲公式为 A. S |v J 2—(丄 n -1 r 1 C. S iv 心』 n 「1 D. 0 还可产生 D.畸变 ( 丄) 「2 丄) r 2 B. D. S |V S |V 16. 波像差就是实际波面与理想波面之间的 A.光程差 B.几何像差 C. 离焦量 17. 在进行目镜光学系统设计时,应 (D J 2T 丄 n 「2 J 2亠(丄 n -1 r 2 (A )。 D.距离差 )。 丄) r i 丄) r i
光学设计论文
第一章前言 随着光学设计的发展,光学仪器已经普遍应用在社会的各个领域。光学仪器的核心部分是光学系统。光学系统成像质量的好坏决定着光学仪器整体质量的好坏。然而,一个高质量的成像光学系统要靠良好的光学设计去完成。 光学设计的理论和方法也在发生着日新月异的变化。光学是研究光的行为和性质,以及光和物质相互作用的物理学科。光是一种电磁波,在物理学中,电磁波由电动力学中的麦克斯韦方程组描述;同时,光具有波粒二象性,需要用量子力学表达。光的本性也是光学研究的重要课题。微粒说把光看成是由微粒组成,认为这些微粒按力学规律沿直线飞行,因此光具有直线传播的性质。我们通常把光学分成几何光学、物理光学和量子光学。 所谓光学系统设计即设计出系统的性能参数、外形尺寸、和各光组的结构等,大体上分为两个阶段,第一阶段为“初步设计”或者“外形尺寸设计”,即根据仪器总体的设计要求,从仪器总体出发,拟定出光学系统的原理图,
并初步计算系统的外形尺寸,以及系统中各部分要求的光学特性。第二阶段称为
“像差设计”,一般称为“光学设计”,即根据初步设计的结果,确定每个透镜的具体结构参数,以保证满足系统光学特性和成型质量成像质量的要求。 一个光学仪器工作性能的优劣,初步设计是关键,当然在初步设计合理的条件下,如果像差设计不当,同样也可能造成不良后果。一个好的设计应该是在满足使用要求的情况下,结构设计最简单的系统。 光学设计是20世纪发展起来的一门学科,至今已经经历了一个漫长的过程。光学系统设计的具体过程:制定合理的技术参数,光学系统总体设计和布局,光组的设计(包括选型,初始结构的计算,像差校正、平衡与像质评价),长光路的拼接与统算,绘制光学系统图、部件图和零件图,编写设计说明书,进行技术答辩。 光学设计的设计步骤为选择系统的类型,分配元件的光焦度,校正初始像差,减小残余像差(高级像差)。重复以上步骤,最终会找到一个满意结果。
ZEMAX光学设计超级学习手册-第1章
第1章ZEMAX入门 ZEMAX是一款使用光线追迹的方法来模拟折射、反射、衍射、偏振的各种序列和非序列光学系统的光学设计和仿真软件。ZEMAX有3种版本:ZEMAX-SE(标准版)、ZEMAX-XE(扩展版)、ZEMAX-EE(工程版),其中ZEMAX-EE的功能最为全面。 ZEMAX的界面设计得比较简洁方便,稍加练习就能很快地进行交互设计使用。ZEMAX的大部分功能通过都能选择弹出或下拉式菜单来实现,键盘快捷键可以用来引导或略过菜单,直接运行。本章将要讲述ZEMAX中的有关约定的解释,界面功能的习惯用法,以及一些常用窗口操作的快捷键。一旦学会了在整个软件中通用的、简单的习惯用法,ZEMAX用起来就很容易了。 学习目标: (1)了解界面主窗口菜单的各项功能。 (2)熟练运用快捷工具栏。 (3)熟练掌握大量光学行业中约定的解释,如优化、公差分析等。 (4)熟练掌握各对话窗口的操作,如镜头数据、波长数据等。 1.1 ZEMAX的启动与退出 安装ZEMAX软件后,系统自动在桌面上产生了ZEMAX快捷图标。同时,“开始”菜单中也自动添加了ZEMAX命令。下面讲解ZEMAX的启动与退出。 1.ZEMAX安装成功后,需要启动ZEMAX,才能使用该软件进行设计工作。ZEMAX 的启动有4种方式。 (1)选择“开始”菜单命令启动。 选择“开始→ZEMAX”命令,启动ZEMAX,如图1-1所示。 (2)选择桌面快捷方式图标。 安装完成,系统会在桌面上自动创建ZEMAX的快捷方式图标,双击图标便可启动ZEMAX,如图1-2所示;右键单击快捷方式图标后单击“打开”也可以启动,如图1-3所示。 如果桌面上没有快捷方式图标,可以从“开始”菜单中找到相应的程序命令发送到桌面快捷方式,如图1-4所示。
总体建设设计方法
第1章. 总体建设设计方案 1.1.建设原则 1、实用性和易用性原则 2、后台数据的充分共享原则 3、开放性与标准化原则 4、可靠性与安全性原则 5、经济性与可扩充性原则 6、接入广泛性及接口标准化 7、查询和统计功能用户定制原则 1.2.系统平台建设设计 序号名称数量 1 备份管理软件(Veritas/commvault/tivoli)1套 2 环境监测用笔记本电脑(IBM/联想/惠普)6台 3 环境监测用台式电脑(IBM/联想/惠普)8台 1.2.1.备份系统技术指标 序号项目指标要求 1 与Windows 的 可靠性和兼容 性 ●要求备份软件有好的兼容性,能支持现有的各种的微软平台。可以通过1 个主备份平台,可以保护现有的WINDOWS平台,Windows NT, Windows 2000和微软最新推出的Windows 2003的32位及64位操作系统,以满足 商业的需求。 ★备份介质管理服务器支持64位Windows操作系统上运行,以提供更好 的备份性能。支持Intel? Xeon EMT64、Intel Pentium? EMT64、AMD Athlon 和AMD Opteron处理器。 ●能支持运行SAK操作系统的NAS设备作为备份设备 ●能支持微软公司的各种应用,包括SQL server, Exchange server, Sharepoint portal server的各种版本,能够支持最新的应用数据库,如SQL 2003,2005,EXCHANGE 2003及SHAREPOINT PORTAL 2003,并且同
时能够备份Windows Server上的各种内核的内容,如Windows Active Directory,集群配额数据库,Windows 2003 Shadow copy 组件等等。 ●要求软件有多种语言版本,对中文操作系统以及各种中文软件有完善的支持。 ★要求配置2个SQL备份客户端,5个文件备份客户端 2 灵活性和易于 使用 ●要求备份软件有友好的操作介面,同时可以提供任何地点皆可使用的 Internet介面,以方便管理人员随时随地进行远程管理。 ★基于Web的文件恢复功能(使用标准的Web浏览器)。IT管理员不再需 要花费时间来恢复最终用户数据。最终用户可以立即安全地恢复自己的服务 器数据。需要时,IT管理员可以从网络中的任何计算机通过相同的Web浏 览器界面恢复数据。 ●要求备份软件有集中管理的能力,有层次化的结构。当有多台备份服务器 需要管理的时候,能通过一个管理平台把多台服务器的状态监控起来。同时, 要有对备份服务器远程维护的能力,如备份服务器的远程安装,远程的修复。 ●要求备份软件简单易用,对各种应用,如文件、SQL,EXCHANGE数据 库的备份和恢复的策略设置都有专门的向导功能,以便用户在最短的时间内 可以将相关的数据保护起来。同时,要求备份软件有像基于日历的任务管理, 方便查阅每天的备份作业。 ●要求备份软件有试运行的功能,以便备份策略在实施前得到验证和修改。 要求备份管理软件除了普通的备份恢复日志外,更有生成备份恢复及其它相 关管理的统计报表/图表的功能,可以将一段时间内备份恢复、备份设备及介 质使用等详细进行详细的统计,并通过图表的方式表现出来。 ●拥有三层结构,能够集中管理备份域中的所有介质服务器。可以通过中央 管理服务器来选择运行备份作业的介质服务器,并对介质和备份设备实现集 中管理。
光学设计cad答案
光学系统设计(三) 一、单项选择题(本大题共 20小题。每小题 1 分,共 20 分) 在每小题列出的四个备选项中只有一个是正确的,请将其代码填写在题后的括号内。错选、多选或未选均无分。 1.系统的像散为零,则系统的子午场曲值( )。 A.大于零 B.小于零 C.等于零 D.无法判断 2.双胶合薄透镜组,如果位置色差校正为零,则倍率色差值为 ( )。 A.大于零 B.小于零 C.等于零 D.无法判断 3.下列像差中,对孔径光阑的大小和位置均有影响的是( )。 A.球差 B. 彗差 C. 像散和场曲 D.畸变 4.除球心和顶点外,第三对无球差点的物方截距为 ( ) 。 A.r n n n L '+= B. r n n n L ''+= C. r n n n L '-= D. r n n n L ''-= 5.下列像差中,属于轴外点细光束像差的是( )。 A.球差 B.子午彗差 C.子午场曲 D.畸变 6.瑞利判据表明,焦深是实际像点在高斯像点前后一定范围内时,波像差不会超过 ( )。 A.λ21 B. λ31 C. λ41 D. λ51 7.对于目视光学系统,介质材料的阿贝常数定义为 ( )。 A.C F D D n n 1n --=ν B. C F D D n n 1n ++=ν C. C F D D n n 1n -+=ν D. C F D D n n 1n +-=ν 8.9K 玻璃和6ZF 玻璃属于 ( )。 A.冕牌玻璃和火石玻璃 B.火石玻璃和冕牌玻璃 C.均属火石玻璃 D.均属冕牌玻璃 9.在ZEMAX 软件中进行显微物镜镜设计,输入视场数据时,应选择 ( )。
光学设计任务书
燕山大学 课程设计说明书题目:摄远物镜设计 学院(系): 年级专业: 学号: 学生姓名: 指导教师: 教师职称:
电气工程学院《课程设计》任务书课程名称:光学仪器基础课程设计
目录 第1章摘要 (3) 第2章 ZEMAX软件和设计方法 (4) 2.1 ZEMAX软件介绍 (4) 2.2 设计方法 (5) 第3章设计过程 (6) 3.1初始结构的选择 (6) 3.2 ZEMAX的设计 (8) 3.3 ZEMAX软件优化 (8) 第4章心得体会 (14) 参考文献 (15)
第一章摘要 本课程的任务是在学习工程光学基础、光学测试技术等技术基础课程的基础上,进行光学仪器的设计,目的是了解光学设计中主要的环节,掌握光学仪器设计、开发的基本方法,以便今后能从事光学仪器的设计、研发工作。本课程主要研究光学仪器设计中的基本部分,如:光源、目镜、物镜、分化板等,以及光学仪器设计中考虑的基本问题,如:物象位置关系、5系统放大倍数、系统分辨率、相差等。课程涉光学基础、光学测试技术、误差理论及数据处理、精密仪器设计等多方面。了解光学系统的光学特性、光学系统的设计过程。初级像差理论与像差的校正和平衡方法,像质评价与像差公差,光学系统结构参数的求解方法。望远物镜设计的特点、双胶合物镜结构参数的求解和光学特性。目镜设计的特点、常用目镜的型式和像差分析。 关键词:光学系统成像质量像差像距摄远物镜
第二章ZEMAX软件和设计方法 2.1 ZEMAX软件介绍 ZEMAX是美国Focus Software Inc.所发展出的光学设计软件,可做光学组件设计与照明系统的照度分析,也可建立反射,折射,绕射等光学模型,并结合优化,公差等分析功能,是套可以运算Seqential及Non-Seqential的软件。 ZEMAX 是一套综合性的光学设计仿真软件,它将实际光学系统的设计概念、优化、分析、公差以及报表整合在一起。ZEMAX 不只是透镜设计软件而已,更是全功能的光学设计分析软件,具有直观、功能强大、灵活、快速、容易使用等优点,与其它软件不同的是 ZEMAX 的 CAD 转文件程序都是双向的,如 IGES 、 STEP 、 SAT 等格式都可转入及转出。而且 ZEMAX 可仿真 Sequential 和 Non-Sequential 的成像系统和非成像系统,ZEMAX光学设计程序是一个完整的光学设计软件,是将实际光学系统的设计概念,优化,分析,公差以及报表集成在一起的一套综合性的光学设计仿真软件。包括光学设计需要的所有功能,可以在实践中对所有光学系统进行设计,优化,分析,并具有容差能力,所有这些强大的功能都直观的呈现于用户界面中。ZEMAX功能强大,速度快,灵活方便,是一个很好的综合性程序。 ZEMAX能够模拟连续和非连续成像系统及非成像系统。 ZEMAX 能够在光学系统设计中实现建模、分析和其他的辅助功能。ZEMAX 的界面简单易用,只需稍加练习,就能够实现互动设计。ZEMAX 中有很多功能能够通过选择对话框和下拉菜单来实现。同时,也提供快捷键以便快速使用菜单命令。手册中对使 ZEMAX 时的一些惯用方法进行了解释,对设计过程和各种功能进行了描述。 ZEMAX目前已经是被光电子领域熟知的光学设计的首选软件。该软件拥有两大特点,就是可以实现序列和非序列分析。在全球范围内,这款软件已经被广大的应用在设计显示系统,照明,成像的使用系统,激光系统以及漫射光的设计应用方面。 ZEMAX 有三种不同的版本:ZEMAX-SE(标准版);ZEMAX-XE(扩展版);ZEMAX-EE(工程版)。
光学cad答案二
光学系统设计(二) 一、单项选择题(本大题共 20小题。每小题 1 分,共 20 分) 在每小题列出的四个备选项中只有一个是正确的,请将其代码填写在题后的括号内。错选、多选或未选均无分。 1.当入瞳在单个折射球面(0>r )的球心右侧时,产生子午彗差是 ( )。 A.正值 B .负值 C.零 D.无法判断 2.假定物位于有限距离处,大小为-y ,当入瞳在单正透镜的左侧时,产生畸变的是 ( )。 A.正值 B .负值 C.零 D.无法判断 3.下列各条件中,描述垂轴小线段完善成像的条件是 ( )。 A.正弦条件 B. 余弦条件 C. 等晕条件 D. 赫歇尔条件 4.边缘光和近轴光色差之差称为 ( ) 。 A.球差 B. 位置色差 C. 二级光谱 D. 色球差 5.下列像差中需要校正二级光谱的是 ( )。 A.低倍显微物镜 B.长焦距平行光管物镜 C.望远物镜 D.照相物镜 6.对于密接双薄透镜系统,要消除二级光谱,两透镜介质应满足 ( )。 A.相对色散相同,阿贝常数相差较小 B.相对色散相同,阿贝常数相差较大 C.相对色散相差较大,阿贝常数相同 D.相对色散相差较小,阿贝常数相同 7.对于球面反射镜,其初级球差表达公式为 ( )。 A.?δ2h 81L =' B. ?δ2h 81L -=' C. ?δ2h 41L =' D. ?δ2h 4 1L -=' 8.下列光学系统中属于大视场大孔径的光学系统是 ( )。 A.显微物镜 B.望远物镜 C.目镜 D. 照相物镜 9.场曲之差称为 ( )。 A.球差 B. 彗差 C. 像散 D. 色差 10.初级球差与视场无关,与孔径的平方成 ( )。 A.正比关系 B.反比关系 C.倒数关系 D.相反数关系 11.场镜除产生场曲外,还会产生 ( )。 A.球差 B.彗差 C.像散 D.畸变 12.普通的正透镜产生的场曲值为 ( )。 A.正值 B.负值 C.零 D.无法判断 13.弯月形厚透镜的介质折射率为1.5,若要自身消除色差,1r 与2r 的差值应满足 ( )。 A. 76d .0r r 21=- B. 56d .0r r 21=- C. 38d .0r r 21=- D. 47d .0r r 21=- 14.求得波像差的参考点是 ( )。 A.折射面球心 B.折射面顶点 C.高斯像点 D.最佳离焦像点 15.对仅包含初级和二级球差的光学系统校正了边缘光球差后,其最佳焦点位置( )。 A. 在高斯像点7h .0L 41'δ处 B. 在高斯像点7h .0L 43'δ处 C. 在高斯像点7h .0L 41'-δ处 D. 在高斯像点7h .0L 4 3'-δ处 16.与子午平面相互垂直的平面叫作 ( )。 A.弧矢平面 B.高斯像面 C.离焦平面 D.主平面 17.在五种初级单色像差中,与孔径和视场均有关系的像差为 ( )。