基于VC的上位机与PLC远程通信设计
利用OPC实现VC应用程序与PLC的数据交换
利用OPC实现VC应用程序与PLC的数据交换关键词: OPC RSView32 VC应用程序可编程控制器1 引言VC(Visual C++)是功能强大的一种Windows应用程序可视化软件开发工具。
VC支持面向对象的设计方法,并可以使用功能强大的微软基础类库MFC(Micro-soft foundation class)。
并且由于Microsoft公司在操作市场上的垄断地位,用VC开发出来的软件稳定性好、可移植性强,而且软件与硬件相互独立,可以用来开发控制系统的上层管理系统。
RSView32是作为一种专门用于工业控制的组态软件,不仅包含了大量图形开发工具和现成图形库,使用户能够方便的进行系统开发,而且还可以对报警、活动记录、事件、历史趋势等进行组态,是一个功能强大的工业自动化产品,因此可以很方便地对下层设备进行组态。
在实际系统开发时,利用OPC技术把两种工具有效的结合起来,使上层的VC程序通过RSView32间接地与下层PLC进行数据通信,以获取令人满意的结果。
2 OPC介绍OPC(OLE for Process Control)是根据Microsoft的OLE(现在Active)、COM(部件对象模型)和DCOM(分布式部件对象模型)技术所要求的功能制定的一个开放和互用式的用户界面标准,它保证了自动化/控制应用程序和区域系统/设备之间的互用。
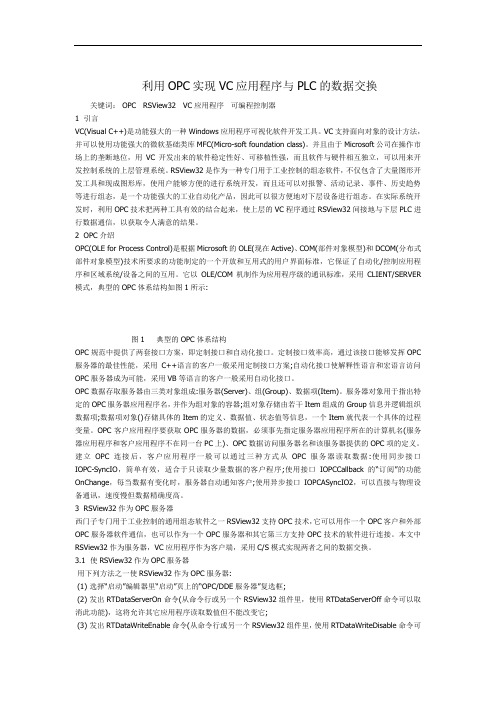
它以OLE/COM机制作为应用程序级的通讯标准,采用CLIENT/SERVER 模式,典型的OPC体系结构如图1所示:图1 典型的OPC体系结构OPC规范中提供了两套接口方案,即定制接口和自动化接口。
定制接口效率高,通过该接口能够发挥OPC 服务器的最佳性能,采用C++语言的客户一般采用定制接口方案;自动化接口使解释性语言和宏语言访问OPC服务器成为可能,采用VB等语言的客户一般采用自动化接口。
OPC数据存取服务器由三类对象组成:服务器(Server)、组(Group)、数据项(Item)。
PLC与上位机的通信
PLC与上位机的通信作者:谭丽来源:《科技资讯》2018年第17期摘要:电子计算机技术的快速发展下不断有新的科技产物出现,电子计算机技术在各个领域中的应用越来越广泛,其中就包括工业上所采用的可编程控制器,集齐编程与控制作用为一身,发挥着非常重要的作用。
为此本文针对这一编程控制系统中最为关键的一部分内容,即PLC与上位机的通信进行简单的介绍,包括其基本原理以及实现通信的必要手段。
因为PLC 与上位机之间实现通信能够更加有效地对工业化生产进行控制,对其发展来说是具有不可替代的作用的,因此这一领域的相关研究人员还不断深入研究,在原有的基础之上不断地进行完善,使其能够充分发挥作用。
关键词:PLC 上位机通信中图分类号:N91 文献标识码:A 文章编号:1672-3791(2018)06(b)-0020-02PLC与上位机通信的实现与发展对于诸多领域来说都是具有非常深刻的意义的,会在很大程度上对其所存在的领域的发展起到促进作用,将电子计算机技术更好地应用到实际中。
本文主要针对工业领域的发展进行详细的介绍,阐述PLC与上位机的基本内容以及通信原理,同时针对实现通信的一些具体内容进行了相关介绍。
相信通过本文的介绍,能够使更多人对PLC 与上位机通信这部分内容有更加详细的了解,这非常有利于其向前发展以及在各行各业中的应用。
1 PLC与上位机通信的基本内容及原理1.1 PLC的简单介绍PLC又称为可编程逻辑控制器,是近些年来计算机领域所研究出来的一种新型控制系统,在工业行业中发挥了非常重要的作用。
PLC早在20年前就已经在一些先进国家被研究和应用了,但是在我国却是近些年来才被广泛使用,在使用过程中能够充分体现出其所具备的优点,可是也存在很多需要改进或是努力的地方,为此首先需要对PLC的基本内容有所了解,清楚到底什么是PLC,只有这样才能够更好地开展研究。
PLC的基本结构与微型计算机大致相同,主要包括电源、中央处理器、存储器、输入设备以及输出设备等多个基本结构,其中不同的结构发挥着不同的作用,具备各自的功能,首先,电源的作用就不必过多介绍了,这是控制这一系统的开关的。
上位机与PLC的通信与监控设计
上位机与PLC的通信与监控设计2008-7-17 8:46:00 来源:中国自动化网1 引言PLC是专为工业控制而设计的专用计算机,其体积小,具有高可靠性和很强的抗干扰能力,因而在工业控制中得到了广泛的使用。
随着工业的自动化程度的提高,对PLC的应用提出了更高的要求:更快的处理速度,更高的可靠性,控制与管理功能一体化。
控制与管理一体化也就是将计算机信息处理技术,网络通信技术应用于PLC,使PLC用于下位分散控制,用计算机提供图形显示界面,同时对下位机进行监控。
本文讨论的是上位计算机与欧姆龙CPM2A型PLC的通信与监控设计。
2 通信协议2.1 CPM2A 的通信链接方式CPM2A有三种通信联系方式:上位链接系统、同位链接系统、ComPoBus通信系统。
工厂自动化系统中常把三种系统复合起来一起使用来实现工厂自动化系统要求的多级功能。
复合型PLC网络中,上位链接系统处于最高位,负责整个系统的监控优化。
上位机与CMP2A的通信有两种方式:上位机命令与PLC通信命令。
上位机命令方式上位机处于主动,命令由上位机发往PLC。
采用上位机命令方式能方便的实现上位机对PLC的监控。
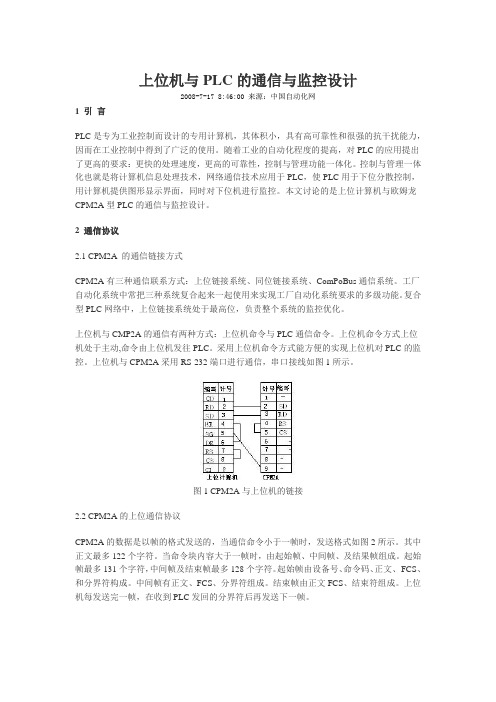
上位机与CPM2A采用RS-232端口进行通信,串口接线如图1所示。
图1 CPM2A与上位机的链接2.2 CPM2A的上位通信协议CPM2A的数据是以帧的格式发送的,当通信命令小于一帧时,发送格式如图2所示。
其中正文最多122个字符。
当命令块内容大于一帧时,由起始帧、中间帧、及结果帧组成。
起始帧最多131个字符,中间帧及结束帧最多128个字符。
起始帧由设备号、命令码、正文、FCS、和分界符构成。
中间帧有正文、FCS、分界符组成。
结束帧由正文FCS、结束符组成。
上位机每发送完一帧,在收到PLC发回的分界符后再发送下一帧。
图2 CPM2A 通信时命令块的格式命令块中的校验码FCS是8位二进制数转换成的2位ASCⅡ字符。
这8位数据是将一帧数据中校验码前的所有字符的ASCⅡ码位按连续异或的结果。
基于VB6.0的上位机与PLC实时通信技术
基于VB6.0的上位机与PLC实时通信技术【摘要】本文围绕基于VB6.0的上位机与PLC实时通信技术展开讨论。
在介绍了该技术的背景和意义。
在分别讨论了VB6.0在工业控制系统中的应用,PLC的应用与特点,上位机与PLC之间的通信方式,以及基于VB6.0的实时通信技术实现方法和在工业控制中的应用。
在预测了该技术的发展趋势和未来应用前景,并对全文进行了总结。
通过本文的研究,读者将了解到基于VB6.0的上位机与PLC实时通信技术在工业控制中的重要性和应用价值,以及未来发展的潜力和前景。
【关键词】关键词:VB6.0、上位机、PLC、实时通信技术、工业控制系统、通信方式、发展趋势、未来应用、应用前景、研究背景、研究意义、实现方法、应用、总结1. 引言1.1 介绍基于VB6.0的上位机与PLC实时通信技术基于VB6.0的上位机与PLC实时通信技术指的是利用Visual Basic 6.0作为编程语言,实现与可编程逻辑控制器(PLC)之间的即时通信。
在工业控制系统中,上位机扮演着监控和控制的角色,而PLC则负责执行实际的控制任务。
通过实时通信技术,上位机可以实时监控和控制PLC的运行状态,实现对生产过程的实时调控。
基于VB6.0的上位机与PLC实时通信技术的实现主要包括建立通信连接、数据传输和接收处理三个步骤。
需要建立通信连接,确定上位机与PLC之间的通信协议和通信方式,例如使用串口通信或以太网通信。
然后通过编程实现数据的传输和接收处理,将上位机发送的指令和数据传输给PLC,并接收并处理PLC返回的状态和数据。
这种基于VB6.0的上位机与PLC实时通信技术在工业自动化控制中具有重要意义。
它可以实现生产过程的实时监控和控制,提高生产效率,减少人力成本,降低故障率,提升生产质量。
同时也为工业控制系统的智能化和网络化发展提供了重要技术支持。
1.2 研究背景由于工业现场环境复杂多变,传统的PLC与上位机通信方式往往存在诸多不足,如实时性差、稳定性差、数据传输速度慢等问题。
基于组件对象模型的上位机—PLC串行通讯程序设计
通 过 实际的 运行 测试 . 功地 对 P C 中的 参数 进行 监控 和 改 写 。 成 L 关 键词 : 组件 ;X一N;L 通 讯协议 F 2 P C;
D s nB sdo o o e tO jc d l ei ae n C mp n n bet g Mo e
WE J njn N a - i u
f h 5hIs tueo E C B in at aj o1 0 ,hn ) T e t ii t f T ,e igE s Y ni 0 C i 4 n st C j a 1 1 6 a
t ra d d f h a a t r ft o n mo iy t e p r mee so PLC fe tv l . he e f c ie y
Ke wo d: o o e t F 2 : L S ra c mm u i ai n P oo o y r C mp n n ; X一 N P C; e — o i nc t r tc l o
Ab t a t T r u h a a y ig t e s r l o sr c : h o g n l zn h e i — mm u ia i n p o o o fM I S BI HIF 2 P C a d U — a c n c t — r t c lo T U S X一 N L n S o
维普资讯
基于组件对象模型的上位机—P C L 串行通讯程序设计
温建 军 ( 国电子 科技 集 团公 司第 四 十五 研究 所 , 中 北京 东 燕郊 1 10 ) 0 6 1 摘 要 : 过应 用 C M 技 术及 对三 菱公 司 F 2 系列 P C 串行 通讯 协 议 的分 析 ,建 立 了用 于 通 O X一N L
基于FINS协议的OMRON PLC与上位机通信

(3)在 VB 中新建一个 standard.EXE 文件。添加 OMRON FinsGateway FinsMessaging Control,对象名为"FinsMsgl"。
(4)在 form 区添加一个 Command button(命名为"Command1")作为发送 Fins 指 令之用;同时添加一个 textbox(命名为"Text1")作为显示所接受数据之用。
ICF 为信息控制域,用于标明指令和响应;RSV 为系统保留;GCT 为网关允许数目;DNA
为目的网络号;DA1 为目的节点号;DA2 为目的单元号;SNA 为源网络号;SA1 为源节 点号;SA2 为源单元号;SID 为服务和响应的标识号,可任意设置,指令和响应对应相同; MRC 和 SRC 分别为 FINS 指令的主指令和从指令;参数/数据域,用于标明所操作的数据 地址、范围等,在响应帧中前两个字节 MRES 和 SRES 构成响应码,用来诊断错误信息。
Private Sub FinsMsg1_OnReceive () Dim net As Integer,node As Integer,unit AsInteger Text1.Text=Fins Msg1.receive Message(net,node,unit,vbString) End Sub
基于 Visual C++6.0的PC与PLC的通信接口软件设计
基于 Visual C++6.0的PC与PLC的通信接口软件设计王局柏;张桂香;赵吉兴
【期刊名称】《计算技术与自动化》
【年(卷),期】2003(022)004
【摘要】本文介绍了在Visaul C++6.0环境下,利用Windows98操作系统的多线程技术,实现了Win32 API函数开发的上位机和PLC的串行通信.本文给出了系统的通信原理和软件设计方法.
【总页数】4页(P81-84)
【作者】王局柏;张桂香;赵吉兴
【作者单位】湖南大学,机械与汽车工程学院,长沙,410082;湖南大学,机械与汽车工程学院,长沙,410082;湖南省冶金科技工贸公司,长沙,410007
【正文语种】中文
【中图分类】TM921
【相关文献】
1.基于Visual C++6.0实现PC与PLC的通信 [J], 李晓明;李东晓
2.PC与PLC实时通信的Visual C++6.0实现 [J], 李东晓;李晓明;李留振;何洋;段俊东
3.基于Visual C++6.0的PLC与计算机之间通信的设计 [J], 王芸;高菲菲
4.基于Visual C++6.0的PLC与计算机之间通信的设计 [J], 王芸;高菲菲
5.基于面向对象编程的PC-PLC以太网通信接口软件设计 [J], 谢哲天
因版权原因,仅展示原文概要,查看原文内容请购买。
c#上位机与三菱PLC(FX3U)串口通讯
c#上位机与三菱PLC(FX3U)串⼝通讯项⽬中会经常⽤到上位机与PLC之间的串⼝通信,本⽂介绍⼀下C#如何编写上位机代码与三菱FX3U进⾏通讯1. 第⼀种⽅法是⾃⼰写代码实现,主要代码如下://对PLC的Y7进⾏置1byte[] Y007_ON = { 0x02, 0x37, 0x30, 0x37, 0x30, 0x35, 0x03, 0x30, 0x36 };//选择串⼝参数SerialPort sp = new SerialPort("COM5", 9600, Parity.Even, 7);//打开串⼝sp.Open();//写⼊数据sp.Write(Y007_ON, 0, Y007_ON.Length);//关闭串⼝sp.Close(); 该⽅法的缺点在于我们⾸先要熟悉三菱PLC的通讯协议,然后根据通信规程来编写通信代码 举例说就是要对三菱PLC的Y007⼝进⾏操作,我们需要知道要对三菱PLC发送什么参数,这 ⾥可以参考百度⽂库的⼀篇⽂章: https:///view/157632dad05abe23482fb4daa58da0116c171fa8.html2.使⽤MX COMPONENT软件 2.1 MX Component 是⼀个⼯具,通过使⽤该⼯具,可以在⽆需具备通信协议及模块知 识的状况下实现从计算机⾄三菱PLC的通信。
MX Component的安装使⽤教程⽹上有很多,顺便找⼀下就可以找到合适的,这样 要说明的是MX Component⼯具,使⽤⼿册和编程⼿册都可以在三菱的⽹站上下载。
⼯具下载: https:///fa/zh/download/dwn_idx_softwareDetail.asp?sid=45 ⼿册下载: https:///fa/zh/download/dwn_idx_manual.asp 下载安装之后sample路径(win10,默认安装):C:\MELSEC\Act\Samples 2.2 介绍安装配置好MX Component之后C#使⽤ActUtlType控件进⾏串⼝通信 ⾸先要引⽤,这两个DLL在例程中可以找到//Logical Station Number的值和在MX Component中设置⼀样int logicalStationNumber = 0;//添加axActUtlType对象AxActUtlTypeLib.AxActUtlType axActUtlType = new AxActUtlTypeLib.AxActUtlType();//不加这三句会报//引发类型为“System.Windows.Forms.AxHost+InvalidActiveXStateException”的异常((ponentModel.ISupportInitialize)(axActUtlType)).BeginInit();this.Controls.Add(axActUtlType);((ponentModel.ISupportInitialize)(axActUtlType)).EndInit();//openaxActUtlType.ActLogicalStationNumber = logicalStationNumber;axActUtlType.ActPassword = "";axActUtlType.Open();//Y7写⼊1int wirteData = 1;axActUtlType.WriteDeviceRandom("Y7", 1, ref wirteData);//D0写⼊100int wirteData1 = 100;axActUtlType.WriteDeviceRandom("D0", 1, ref wirteData1);//读D0数据int readData;axActUtlType.ReadDeviceRandom("D0", 1, ref readData);//closeaxActUtlType.Close(); 这⾥只是简单介绍,更深⼊的内容还是去看编程⼿册和例程。
基于VB6.0的上位机与PLC实时通信技术
基于VB6.0的上位机与PLC实时通信技术一、通信原理上位机与PLC之间的通信是通过通信协议来实现的。
通信协议是一种规定了通信双方之间通信方式和通信内容的标准化协议。
常见的通信协议有MODBUS、OPC、PROFIBUS等。
在实际应用中,根据不同的PLC型号和通信需求,选择适合的通信协议进行通信。
二、通信协议MODBUS协议是一种基于主从结构的通信协议,包括MODBUS RTU和MODBUS TCP两种通信方式。
MODBUS RTU是基于串行通信的通信方式,通信速度较快,适合于工业现场环境。
MODBUS TCP是基于以太网通信的通信方式,通信速度更快,可实现远程通信。
基于VB6.0的上位机与PLC通信通常采用MODBUS RTU协议。
在VB6.0中,可以通过串口通信控件MSComm控件实现MODBUS RTU通信。
通过设置通信端口、波特率、数据位、停止位等参数,编写相应的通信程序,实现与PLC的通信。
三、软件设计基于VB6.0的上位机软件设计需要考虑可视化界面和通信功能的实现。
在软件设计中,需要设计用户界面,包括监控界面、控制界面、报警界面等。
需要设计通信功能,包括与PLC的连接、数据读写、通信异常处理等。
在VB6.0中,可以通过控件的方式实现软件的界面设计。
通过使用标签、文本框、按钮等控件,设计出符合用户需求的可视化界面。
在通信功能的实现中,可以通过MSComm控件实现与PLC的连接和数据读写功能。
通过编写相应的通信程序,实现与PLC之间的实时通信。
四、实现方法基于VB6.0的上位机与PLC通信的实现方法主要包括以下几个步骤:1. 确定通信协议:根据PLC型号和通信需求,选择适合的通信协议,如MODBUS协议。
2. 设计界面:设计符合用户需求的可视化界面,包括监控界面、控制界面、报警界面等。
3. 编写通信程序:通过VB6.0编写通信程序,实现与PLC的连接、数据读写等功能。
在编写通信程序时,需要考虑通信协议的格式要求,保证通信数据的准确传输。
基于VC++的PC与PLC的通信软件设计
基于VC++的PC与PLC的通信软件设计
李丰堂;谢明红
【期刊名称】《计算机技术与发展》
【年(卷),期】2008(018)008
【摘要】目前PLC已广泛应用于工业控制的各个领域,在现代化建设中发挥了重要作用.在PLC的实际应用中,人们需要对其工作状态进行实时监控,对不符合要求的参数进行及时修改,以提高产品的质量.正是根据这种需求设计了基于VC++的PC 与PLC的通信软件.文中介绍了OMRONPIG与计算机之间的通信协议以及通信参数的设置,并用VC++6.0编写的串口通信软件实现了两者之间的通信,并给出了通信软件的设计方法.利用这个软件,人们可以方便直观地对PLC的工作状态进行随时监控.
【总页数】4页(P219-222)
【作者】李丰堂;谢明红
【作者单位】华侨大学,机电及自动化学院,福建,泉州,362021;华侨大学,机电及自动化学院,福建,泉州,362021
【正文语种】中文
【中图分类】TP311
【相关文献】
1.基于VC++的多PLC与PC通信系统的研究 [J], 陈其松
2.基于 Visual C++6.0的PC与PLC的通信接口软件设计 [J], 王局柏;张桂香;赵
吉兴
3.VC++环境下Siemens PLC与PC的串行通信 [J], 卫庆军;曾文火;曹传生;闫红蕾
4.用VC++实现PC与多PLC之间串行通信的方法 [J], 陈兴; 张礼全; 史旺旺
5.基于面向对象编程的PC-PLC以太网通信接口软件设计 [J], 谢哲天
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
着上位 机 根据 HOS I 通信 协议 , P C发送 命 令 帧 数 据 , P 行 信 息 交 换 。 T LNK 向 L 与 I c进
该 方法 为 进一 步开 发基 于 电话 网 的远 程监控 P C系 统提 供 了有 价值 的参 考 。 L
关键词 :电话 网 ; 程通 信 ;MS o 远 C mm; L P C;HOS I 协议 ;VC T L NK 中 图分 类 号 :T 3 1 8 P 9 . 文 献标识 码 : A
当上位 计算 机 与 P C近距 离通 信 时 , 常 使 用 R 2 2 L 通 S 3 C或 RS 2/ 8A 通信 口, 者 的通 信 距 离一 般 4 2 45 前 限制在 1 后 者 的通 信距 离可 达 12 0m。当上位 机 与 P C相距 遥 远 时 , 用 Mo e 借 助 电话线 进行 通 5m, 0 L 使 dm
维普资讯
第2卷 第 3 1 期
20 0 6年 9月
青 岛大 学 学 报 ( 程 技 术 版 ) 工
J R L O NG A NI E ST ( OU NA F QI D O U V R I Y E&T)
Vo . 1 No 3 I2 .
命帧 节点号 命令码 正文, 三 FCS 结束符 令 匝 最多 13 2 个字符
响应帧 @ l I × ×I× l ×l ×l ×l … l×l ・ C ×l l R
节点号 命令码 响应码 正文, 最多 1 1 2 个字符 F S结束符 C
节点 号用 于标 识与 上位 机通 信 的 P C, L 响应码 用 于返 回命令 的完成 状 态 , 显示是 否 产生 错误 及 原 因 。 上位机 发 送 命 令 时 , 计算 帧校 验 码 F S 并将 F S作 为 命 令 数 据 帧 的一 部 分 发 送 到接 收端 , 收 到 要 C , C 接 P C的 响应 帧后 , L 要重 新计 算 F S并 与 响应 帧 中的 F S相 比较 , C C 如果 相 同 , 示通 信 成 功 , 果 不相 同表示 表 如
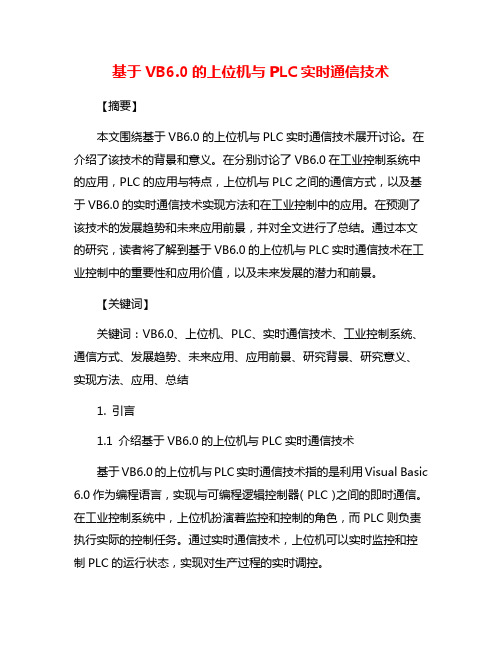
图 1 上 位 机 通 过 电话 线 对 P C进 行 远 程 编 程 与 监 控 L
2 HO TL N 通 信 协 议 S I K
上 位 机 使 用 HOS ik通信 协 议 与 O ON P C通信 , 位 机 具有 传 送 优 先 权 , 是 首 先 发 出命令 T Ln MR L 上 总 并启动 通信 , L P C收 到命令 后 加 以执行 , 将执 行 结果返 回上位 机 , 者 以帧为 单 位 轮 流交 换 数 据 。通 信 时 并 二
信不 失 为一种 简 便易 行 的方法 。
1 系统 组成
文 中系统 由监 控 中心 的上 位 机 、 d m 及 现 场 的 Mo e
Mo e 和 C dm QM1 P C 组 成 。C H L QM1 配 有 R 2 2 H S 3
接 口, 经通 信 电缆 与 Mo e 相 连 。图 1给 出 了 上位 机 dm 通过 电话线 对 P C进行 远 程编 程 与监 控 的的示 意 图 。 L
摘要 :上位机 对 远程 P C监 控 时 , 要 与远程 P C建立 通 信 连 接 , L 需 L 研究 通 过 电话 网 实 现 上位 机和 远程 P C通 信 的方法 。下位 机选 用 OMRON C L QM1 型 机 , 位 机利 用 Vi — H 上 s u a C+ +6 0及 MS o l . C mm 控 件 编程 , 调用 调制 解 调器 指 令拨 号与 远 程 P C建 立 连 接 , L 接
收 稿 日期 :20 —0 0 6 1—2 ;修 回 日期 : 0 6—0 0 20 6—0 9
作 者 简 介 :徐世 许 (9 5一 , , 1 6 )男 副教 授 , 读 博 士 , 在 主要 从 事 计 算机 控 制等 研 究 工 作 。
维普资讯
一
组传送 的数据 称 为块 , 从上 位 机发 送 到 P I C的数据 块称 为命 令 块 , P 送 到上 位 机 的 数据 块 称 为 响 从 I c发
。单 帧时 的命 令 和响 应格 式如 下 所示 :
应 块 。每个 块 以@及 节点 号 开始 , 以校验 码及 结 束符结 束 , 帧 发送 时最 大 数 据 块为 1 1个 字 符 , 单 3 当信 息 内 容 大于 一帧 时 , 由起 始帧 、 中间帧 和结 束 帧组 成多 帧发送
交互 作用 的方法 : 事件 驱 动法 , 方 法利 用 O C mm 事件 捕获 并 处理 通信 及 其错 误 , C mmE et 该 no 当 o vn 属性 发 生变 化 时 , 就产 生事件 并 等待相 应 处理 。每个 MS o C mm 控 件都 有 一个 串 口相 对 应 。MS o C mm 控件 基 本
4 2 通 信失 败 。
青岛大 学学报 ( 程技术版 ) 工
第 2 卷 1
3 上 位机 通信 程序 设计
VC ++6 0中利用 MS o . C mm 控 件通 过 串行端 口传 送 和接 收 数 据 , 分 方便 。如 果 通 过 串 口连 接 Mo 十 — d m, 可 以经过 电话线 与远 程设 备进 行数 据交换 及 实时 监 控 。MS o e 则 C mm 控 件提 供 了一 种 有 效 的处 理 串 口
Se . 2 0 0 6 p
文 章 编 号 :0 6 7 8 2 0 )3—0 4 10 —9 9 (0 6 0 0 1—0 5
ห้องสมุดไป่ตู้
基于 V C的上 位机与 P C远程 通信 设计 L
徐 世 许。 ,孙 卫 国 ,于 金 鹏 ,郑 健
( 岛大 学 a 自动化 工程 学院 ,b 青 . .人 事 处 ,山 东 青 岛 26 7) 60 1