永磁同步电机伺服仿真系统关键技术研究
三相永磁同步电机(PMSM)矢量控制建模与仿真
目录1 引言 (1)1.1 课题的背景与意义 (1)1.1.1 课题背景 (1)1.1.2 课题意义 (1)1.2 永磁电机发展概况 (1)2 机电能量转换和拉格朗日方程 (2)2.1 机电能量转换 (2)2.2 三相同步电机电磁转矩 (7)2.3 拉格朗日方程 (9)3 三相永磁同步电机的数学模型 (11)3.1 三相PMSM的基本数学模型 (11)3.2 三相PMSM的坐标变换 (13)3.2.1 Clark变换 (13)3.2.2 Park变换 (14)3.3 同步旋转坐标系下PMSM的数学模型 (14)4 三相永磁同步电机的矢量控制 (16)4.1 转速环PI调节器的参数整定 (16)4.2 电流环PI调节器的参数整定 (17)4.3 三相PMSM矢量控制系统的仿真 (19)4.3.1 仿真建模 (19)4.3.2 仿真结果分析 (22)总结 (23)参考文献 (23)三相永磁同步电机矢量控制建模与仿真摘要:永磁同步电机具有体积小、效率和功率因数高等优点,因此越来越多的应用在各种功率等级的场合。
永磁同步电机的控制是永磁同步电机应用的关键技术,永磁同步电机的结构特点使得采用矢量控制系统有很大的优势。
本文首先分析了永磁同步电机矢量控制的发展概况,然后从机电能量转换的角度出发,解释三相永磁同步电机的机电能量转换原理,推导拉格朗日运动方程。
此外,列写出永磁同步电机在三相静止坐标系和dq坐标系下的数学模型。
基于Simulink建立了转速电流双闭环矢量控制系统的仿真模型,通过对仿真结果分析,验证了永磁同步电机矢量控制系统性能的优越性。
关键词:永磁同步电机,矢量控制,Simulink1 引言1.1 课题的背景与意义1.1.1 课题背景交流电机的控制性能在磁场定向矢量控制技术提出后才有了质的飞跃。
磁场定向矢量控制技术采用的是励磁电流和转矩电流的解稱控制,兼顾磁场和转矩的控制,克服了交流电机自身耦合的缺点。
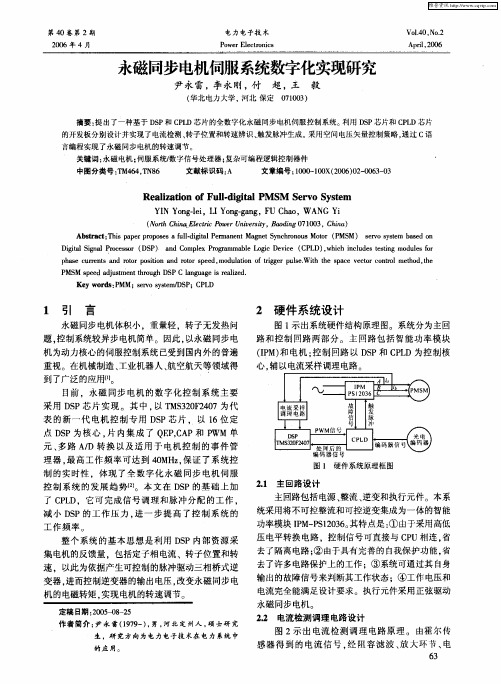
永磁同步电机伺服系统数字化实现研究
工作 频 率 。
习 蓉
21 主回路设 计 .
主回路包括电源 、 整流 、 逆变和执行元件。本系 统采用将不可控整流和可控逆变集成为一体的智能
功率模块 IM P 10 6 其特点是 : 由于采用高低 P — S23 。 ①
压电平转换电路 ,控制信号可直接与 C U相连 。 P 省
整个 系统 的基本 思想是利用 D P内部 资源采 S 集电机 的反馈量 。包括定子相 电流 、转子位置和转 速 .以此为依据产生可控制的脉冲驱动三相桥式逆 变器 。 进而控制逆变器的输出电压 , 改变永磁同步 电 机的电磁转矩 . 实现 电机的转速调节。
22 电流检 测 调理 电路设 计 .
作者简 介 : 尹永 雷(9 9 ) 男 , 北定 州人 , 士研 究 17一 , 河 硕
关键词 : 永磁 电S ; L伺服 系统/ 数字信号处理器 ; 复杂可编程逻辑控制器件
中图分类号 :M 6 . N 6 T 4 4 T 8
文献标识码 : A
文章编号 :0 0 10 20 )2 0 6 — 3 10 — 0 X(0 60 — 0 3 0
Re l ai n o l d gt l M S e v y tm ai t fFul iia z o - P M S r o S se
p a e c re t n t r p st n a d r tr s e d, d l t n o r g r p leW i h p c e tr c nr lmeh d t e h s u r n s a d r o o i o n o p e mo u ai ft g e u s . t t e s a e v co o t to .h o i o o i h o
永磁同步直线电机速度控制系统的研究

d£
-A 4 B + / .
( 6 )
式中: “ 、 “ 、 i 、 i 、 L 、 L 分 别 为 直 、 交 轴 电压 、 电 流 及
1 永 磁 直 线 电 机 数 学 模 型
本 文 中永 磁直 线 电机 伺 服控制 系统 由速度 外环 和
电感 , 对 直线 电机 L 一L 。 一L; P为极 对 数 ; R为 电枢
L i .
3 永 磁 直 线 电机控 制 算 法
收 稿 日期 : 2 0 1 2 0 5 0 3
基 金项 目 : 福 建 省 科 技 计 划 重 大项 目 ( 2 0 1 2 H6 0 2 3 )
*通信 作 者 : h o n g y q @x mu . e d u . c n
线 电 机 控 制 系 统 的优 缺点 . 通 过 分 析 比较 , 得 出永 磁 同步 直 线 电机 调 速 系 统 中基 于 饱 和 函数 的模 糊 滑 模 控 制 系统 具 有 很 强 的 鲁 棒性 , 可 以有 效 地 削 弱 抖 振 , 系统 动 静 态 性 能 良好 .
关键 词 : 永磁 同步直线 电机 ; 模糊滑模控制 ; MA TL A B仿真 中图分类 号 : T M 3 0 1 . 2 文献标 志码 : A 文章 编号 : 0 4 3 8 — 0 4 7 9 ( 2 0 1 3 ) 0 1 — 0 0 4 8 — 0 5
3 . 1 比例 、 积分 、 微分 ( P l D) 控 制
最 常用 的 P I D控 制 运 用 于 各 种 控 制 系 统 中. 利 用 临
第 1期
王春梅等 : 永 磁 同 步 直 线 电 机 速 度 控 制 系 统 的研 究
( a ) d 轴 电压方程
永磁同步电机伺服系统H∞控制研究

?
d
警
, .
儿
() 1
其 中 : , 分别 为直轴 ( “ 轴 )交 轴 ( 、 q轴 ) 电压 ;
、
f 分别 为直轴 、 。 交轴 电流 ;
。
经济模 型 的控制 等 。但 H 控 制在 永 磁 同 步 电机 控制 系统 中的应 用 还 较少 , 薛鹏 等 人 对 永磁 同
这 发展前景广阔 , 正在 成为 电力传 动 领 域 的研 究 热 点 。 目前 , 磁 同 永
步 电动机 的控制 器大都 采用 经典 的 P 控 制方 式 , I 受负载 状况 、 和 、 升及 老 化 等 因素 的影 响 , 饱 温 永 磁 同步 电动 机 的绕 组 电阻 、 电感 和转 子 磁链 等 参 数会发 生变 化 , 得控 制系统 的性 能很不 理想 J 使 。 H 鲁 棒控 制是 当今 国 内外 研究 热 点 J其应 用 , 的场合 非 常广 泛 , 航 空 发 动 机 、 如 帆船 的 航 向 系
收 稿 日期 :o 8一 9一l 2o O 1
其 中 : 为 电磁转 矩 。 = + , =Lf, 将它 们代 入式 ( ) 2 ,
第 5期
吴 雪芬 : 永磁 同步 电机伺 服 系 统 H 控制 研究
2 3
即 司得 到 P M 总 转 矩 公 式 MS
=
大 惯 量 为 0 0 4 k m 转 轴 阻 尼 系 数 标 称 值 . 0 g・ ,
02N・ s电机 的转矩 常数 七 =l N・ . m・, 1 n A。
动 力 学方程 。根据 伺服 系统参数 变动 范围和扰 动 力 的特 点 , 选择 了较 优 的权 重 函数 , 计 了 H 设 鲁 棒 速度控 制 器 。仿 真结 果表 明 , 设计 的 H 速 度控 制 器与传 统的 P 控 制 器相 比 , I 对模 型摄 动具 有较
基于matlab的永磁同步电机调速系统的仿真
摘要本文首先介绍了永磁同步电机的国内外发展状况,然后介绍了永磁同步电机的结构及原理,接着建立了永磁同步电机的数学模型,并在此基础上用MATLAB 进行了仿真,最后进行了仿真及仿真结果的分析。
永磁同步电机是具有非线性、强耦合性、时变性的系统,在运行过程中会受到负载扰动等多因素影响。
以往研究永磁同步电机的做法是在硬件上搭建一个平台进行模拟,但是这样在做实验中难免会造成一些损失,而且硬件上的反馈会比较长研究周期长。
目前在国内外关于永磁同步电机调速系统的研究现状上来讲,基于MATLAB环境下仿真模型的构建下进行研究,这可极大的缩短研究周期和研究成本。
在利用MATLAB仿真模型研究永磁同步电机时,我们可以把那些扰动因数做成模拟信号给予模型,这样可以准确的定性分析实验得出结论。
关键字:永磁同步电机,空间矢量调制,MATLAB仿真,数学模型。
ABSTRACTIn the first, this paper introduces the domestic and international development status of Permanent Magnet Synchronous Motor(PMSM), gives a explanation about its basictheory, structure. Then it builds a mathematical model, and uses MATLAB to simulate that model.The PMSM is a nonlinear, strong-coupling and time-varying system, so in the operation process, it will be influenced by many factors such asload disturbance. Therere, it is necessary to take action when researching the control method of PMSM. The former research method is setting up a platform on hardware to perform experimensbut it is undesirable, because it often cause some loss, and the feedback cycle is longer than research cycle. As fordomestic and international current situation on the research of PMSM, it is obvious that researching under the simulation model created by MATLAB could greatly reduce the cost and cycle of researchment. When using MATLAB to build simulation model on the research of PMSM, we can transform these disturbance factors into analog signal, making a qualitative analysis to draw conclusions from them.Keywords:PMSM, SVPWM, MATLAB simulation, mathmatical model目录摘要 (I)ABSTRACT .............................................. I I 目录............................................... I II 第一章绪论 (1)1.1 研究背景及意义 (1)1.1.1 研究背景 (1)1.1.2 研究的目的及意义 (1)1.2 国内外研究现状 (2)1.2.1 国内研究历史及现状 (2)1.2.2 国外研究现状及趋势 (2)1.3 本文的主要内容 (3)第二章永磁同步电机调速系统的结构和数学模型 (5)2.1 引言 (5)2.2 永磁同步电机调速系统的结构 (5)2.3 永磁同步电机调速系统的数学模型 (6)2.3.1 PMSM在ABC坐标系下的磁链和电压方程 (6)坐标系下的磁链和电压方程 (8)2.3.2 PMSM在02.3.3 PMSM在dq0坐标系下的磁链和电压方程 (9)2.4 永磁同步电机的控制策略 (11)2.5 本章小节 (12)第三章永磁同步电机矢量控制及空间矢量脉宽调制 (14)3.1 引言 (14)3.2 永磁同步电动机的矢量控制 (14)3.3 空间矢量脉宽调制概念 (15)3.4 SVPWM模块的建立 (17)3.5 本章小结 (23)第四章基于Matlab的永磁同步调速系统仿真模型的建立 (24)4.1 引言 (24)4.2 MATLAB软件的介绍 (24)4.3永磁同步电机调速系统整体模型的建立 (25)4.4仿真参数调试及结果分析 (28)4.5本章小结 (29)第五章总结与展望 (30)5.1全文总结 (30)参考文献 (31)致谢 (33)第一章绪论1.1 研究背景及意义1.1.1 研究背景随着电力电子技术、微电子技术和现代电机控制理论的发展,交流调速系统逐步具备了宽调速范围、高稳速精度、快速动态响应及四象限运行等良好的技术性能,交流调速系统应用越来越广泛。
基于永磁同步电机的零航速减摇鳍伺服系统研究
( col f l tcl ni e n n uo ao , ab stt o eh o g , a i 100 C i 1Sho o Ee ra E g er gadA t tn H ri I tu f cnl y H r n 50 1,h a c i n i m i nn i e T o b n 2S h o o uo t n abnE g er gU ie i , ri 10 0 C i ) col f t i ,H ri n i e n nvr t Habn 5 0 1, hn A ma o n i sy a
维普资讯
第 1卷 第 4期 20 0 6年 8月
中 国
舰
船
研
究
V0 _ No 4 l1 . Au . 2 06 g 0
C i e e u n lo hp Re e r h h n s o r a fS i s a c
基 于 永 磁 同步 电机 的 零航 速 减 摇 鳍 伺 服 系统 研 究
姚 绪 梁 张 晓飞
( 1哈 尔滨工 业大 学 电 气工程 与 自动化 学院 , 黑龙 江 哈尔滨 10 0 ; 50 1 2哈 尔滨 工程大 学 自动化学 院 , 黑龙江 哈 尔滨 10 0 ) 5 0 1
摘 要 : 有 的船 舶 零 航 速 减 摇 鳍 都 采 用 液 压 伺 服 系 统 , 是 存 在 许 多 缺 点 。为 了 克 服 这 些 缺 点 , 索 了 电 现 但 探
p rmee f du traes t h o l e rP D c nrl ri d s n d t e u eteafcsc u e aa tr o j s r e.T en ni a I o t l e i e ord c h fet a sd s a e n oe s g
基于ANSOFT的在线启动永磁同步电机空载启动仿真研究
2010年第34期(总第169期)NO.34.2010(C um ula tive tyNO.169)摘要:利用Ansoft公司的M axw ell2D瞬态模块,建立了在线启动永磁同步电动机模型,加载激励源,构成一个完整的仿真系统。
通过对电动机的模型瞬态有限元分析,得到了绕组磁链、转速、转矩和反电势曲线。
仿真结果精确地反映了在线启动永磁电动机启动过程,为永磁同步电动机优化设计、减少转矩脉动、提高启动转矩提供了理论依据。
关键词:在线启动永磁同步电动机;启动过程;电磁场有限元法;Ansoft瞬态分析中图分类号:TM341 文献标识码:A文章编号:1009-2374(2010)34-0140-03在线起动永磁同步电机也是一种典型的永磁同步电动机,该机与一般普通感应电机一样,在启动过程中也要求具有一定的起动转矩倍数、起动电流倍数和最小转矩倍数,还要求其具有足够的牵入同步的能力。
由于在线起动永磁同步电机在转子上安放了永磁体,使得电机交、轴磁路磁导不相等以及永磁体的存在,给起动过程的计算分析带了困难。
若启动绕组设计不当,即使电机运行性能很好,也可能使机不能牵入同步运行。
因此在线启动永磁同步电机的启动过程比感应电机复杂,在启动过程中既有平均转矩又有脉动转矩,并且这些转矩的幅值随电机转速的变化而改变,在线起动永磁同步电机一般用在要求较高的场合,对电动机的要求主要体现要求电动机具有高效率、高功率因数、较高的起动品质因数和单位功率的永磁体用量,所以,正确地确定电机的主要尺寸、选择永磁材料和转子磁路结构、估算永磁体尺寸定转子冲片尺寸和绕组数据的选择,对电机的性能有重大影响。
本文应用Ans oft公司的电磁分析软件对电机动过程进行了仿真,说明有限元磁场分析方法对复杂永磁同步电机分析的精确性。
1 设计软件分析随着计算机辅助设计技术的飞速发展,涌现出了许多用于电磁场有限元数值计算的软件。
大多数软件静态场分析较为完善,所以目前一般是利用有限元软件进行静态分析,优化设计永磁同步电动机。
飞轮储能系统高速永磁同步电动发电机控制关键技术研究
飞轮储能系统高速永磁同步电动发电机控制关键技术研究一、本文概述随着全球能源结构的转型和可再生能源的大力发展,飞轮储能系统作为一种新型储能技术,凭借其高功率密度、快速充放电、长寿命等优势,逐渐受到业界的广泛关注和深入研究。
高速永磁同步电动发电机作为飞轮储能系统的核心部件,其控制技术的优劣直接影响到整个系统的性能与稳定性。
对高速永磁同步电动发电机控制关键技术的研究具有重要的理论意义和实际应用价值。
本文旨在深入研究飞轮储能系统中高速永磁同步电动发电机的控制技术,针对其高速旋转、高功率密度、高精度控制等特点,探索有效的控制策略和优化方法。
对高速永磁同步电动发电机的基本原理和结构特点进行详细介绍,为后续的控制技术研究奠定理论基础。
重点分析现有控制技术的优缺点,并针对存在的问题提出改进方案。
在此基础上,结合先进的控制理论和技术手段,设计高效的控制算法,实现对高速永磁同步电动发电机的高效、稳定控制。
通过仿真和实验验证所提控制技术的有效性和可行性,为飞轮储能系统的实际应用提供有力支持。
本文的研究内容不仅有助于推动飞轮储能技术的发展和应用,也为相关领域的研究人员提供有益的参考和借鉴。
同时,本文的研究成果对于提高我国在新能源和储能技术领域的自主创新能力和核心竞争力具有重要意义。
二、飞轮储能系统概述飞轮储能系统(Flywheel Energy Storage System,FESS)是一种基于机械能储存与释放原理的新型储能技术。
其基本原理是,通过高速旋转的飞轮将电能转化为机械能进行储存,当需要能量时,飞轮减速将机械能再转化回电能。
这种储能方式具有响应速度快、效率高、寿命长、维护成本低等优点,因此在电力调峰、分布式能源、不间断电源等领域具有广泛的应用前景。
飞轮储能系统的核心部件是高速永磁同步电动发电机(HighSpeed Permanent Magnet Synchronous MotorGenerator,HSPMSG)。
永磁同步电动机矢量控制模型的设计与仿真
永磁同步电动机矢量控制模型的设计与仿真交流调速理论包括矢量控制和直接转矩控制。
1971年,由F.Blaschke 提出的矢量控制理论第一次使交流电机控制理论获得了质的飞跃。
矢量控制采用了矢量变换的方法,通过把交流电机的磁通与转矩的控制解耦使交流电机的控制类似于直流电动机。
矢量控制方法在实现过程中需要复杂的坐标变换,而且对电机的参数依赖性较大。
直接转矩控制是1985年Depenbrock教授在研究异步电机控制方法时提出的。
该方法是在定子坐标系下分析交流电机的数学模型,强调对电机的转矩进行直接控制,对转矩进行砰一砰控制,无需解耦,省掉了矢量旋转变换计算。
控制定子磁链而不是转子磁链,不受转子参数变化的影响,但不可避免地产生转矩脉动,低速性能较差,调速范围受到限制。
而且由于它对实时性要求高、计算量大,对控制系统微处理器的性能要求也较高。
矢量控制的基本思想是在普通的三相交流电动机上设法模拟直流电动机转矩控制的规律,在磁场定向坐标上,将电流矢量分解成为产生磁通的励磁电流分量和产生转矩的转矩电流分量,并使得两个分量互相垂直,彼此独立,然后分别进行调节。
这样交流电动机的转矩控制,从原理和特性上就和直流电动机相似了。
控制策略的选择上是PID控制,传统的数字PID控制是一种技术成熟、应用最为广泛的控制算法,其结构简单,调节方便。
1 永磁同步电机的数学模型1.1 永磁同步电机系统的结构永磁同步电机的基本组成:定子绕组、转子、机体。
定子绕组通过三相交流电,产生与电源频率同步的旋转磁场。
转子是用永磁材料做成的永磁体,它在定子绕组产生的旋转磁场的作用下,开始旋转。
1.2 坐标变换坐标变换,从数学角度看,就是将方程中原来的一组变量,用一组新的变量来代替。
线性变换是指这种新旧变量之间存在线性关系。
电动机中用到的坐标变换都是线性变换。
在永磁同步电机中存在两种坐标系,一种是固定在定子上的它相对我们是静止的,即:α,β 坐标系,它的方向和定子三相绕组的位置相对固定,它的方向定位于定子绕组 A 相的产生磁势的方向,另一种是固定在转子上的旋转坐标系,我们通常称之为 d,q 坐标,其中 d 轴跟单磁极的 N 极方向相同,即和磁力线的方向相同,q 轴超前 d 轴 90 度下图所示。
基于SVPWM控制的永磁同步伺服电机调速研究
以永 磁 同步 电机 的 磁路 和绕 组对 称 , 电 机 磁
MA T L A B\ S i m u l i n k中集 成 的永磁 同步 电机模 型在 调 速系 统 中 存 在 着参 数 不 可 动态 修 改 , 坐标 定义 不符 合 常 规 逻 辑 等不 足 , 笔 者 重新 建 立 了 永 磁 同步 电机 的仿 真模 型 。永 磁 同步 电机 的转 子 结
修, 体 积 比较小 , 并且 对 转速 和功 率 的提 高很 有 帮
助 。笔 者对 由伺 服 驱动 器所 构成 的永 磁 同步 伺 服 系统 进 行 了数 学 描 述 , 并 采 用 电 压 空 间矢 量对 永 磁 同步交 流 伺服 系 统进 行 控 制 , 在 MA T L A B环境 中, 固有 的永 磁 同步 电机 模块 虽然 参数 可 以设 定 , 但 由于模 型 是 不 完 全 开 放 的 , 所 以限 制 了一 些 算 法 的应 用 。笔者 对永 磁 同步 电动 机进 行 了完 整 的
摘 要 通 过 电 压 空 间 矢 量 控 制 方 法 时 永 磁 同 步 伺 服 电机 进 行 了 研 究 。 在 传 统 S V P WM 算 法 的 基 础 上, 对 扇 区判 断环 节 、 电压 矢量 作 用 时 间 求 解 环 节 进 行 改进 , 化 简 了传 统 计 算 方 法 中 的 繁 琐 过 程 。 应 用
多相 平衡 电流获得 旋转 磁势 。笔 者应 用坐 标 变换
来 实现永 磁 同步 电机模 型 的简化 和解 耦 。
பைடு நூலகம்
数学 建模 并设 计 得 出全开 放 的永磁 同步 电机 仿 真
模 块 。依 据 系统 模 型 着 重 研 究 了矢 量 控 制 策 略 ,