第三章三相异步电动机的电力拖动
第3章三相异步电动机原理与维修1节

第一节 三相异步电动机的工作原理与结构
一、基本工作原理:
三相异步电动机定子接三相 电源后,电机内便形成圆形 旋转磁动势,旋转磁场转速 n1,设其方向为逆时针转, 如图所示。若转子不转,转 子导条与旋转磁密有相对运 动,导条中有感应电动势e, 方向由右手定则确定。
由于转子导条彼此在端部 短路,于是导条中有电流, 不考虑电动势与电流的相 位差时,电流方向同电动 势方向。这样,导条就在 磁场中受电磁力f,用左手 定则确定受力方向,如图 所示。
3、三相绕组应对称,结构相同、阻抗相等,空 间位置互差120°电角度;
4、用材省,绝缘性能好,机械强度高和散热条 件好;
5、制造工艺简单,维修方便。
(二)基本概念 1、电角度与机械角度 电机圆周在几何上分为360°,这个角度称为机械
角度。
导体切割按正弦规律变化的一对磁极磁场,其中感 应的电动势也按正弦变化一周,即经过360°电角 度,因而一对磁极占有360°电角度,若电机有p对 磁极,电机圆周按电角度计算为p× 360°。
A
ZX
iB C
Y
B
iC
i
iA
iB
iC
ωt
O
120° 240°
360°
首端流入为正,末端流入为负
A
A
A
×
·
Y×
·Z Y
× Z Y·
Z
× C
· BC · ·
X (a) ω t = 0°
X (b) ω t = 120°
BC
×B ×
X (c) ω t = 240°
结论: (1)在对称的三相绕组中通入三相对称电流,可以产
静止的转子与旋转磁场之间有相对运动,在转子导 体中产生感应电动势,并在形成闭合回路的转子导 体中产生感应电流,其方向用右手定则判定。转子 电流在旋转磁场中受到磁场力F的作用,F的方向用 左手定则判定。电磁力在转轴上形成电磁转矩,电 磁转矩的方向与旋转磁场的方向一致。
《电机与应用》习题答案思考题与习题及答案3

思考题与习题三(参考答案)P102 第三章3—1 什么叫电力拖动系统?电力拖动系统通常需由哪些部分组成?答:p 79,由电动机拖动生产机械或工作机构,并按一定的程序工作的系统,电力拖动系统通常需由电源、电动机、控制设备、生产或工作机构等部分组成。
3—2 举出五种常见的电力拖动实例。
答:p79,电风扇、洗衣机、水泵、生产机床、电梯、电动吊车等3—3 以最常见的吊扇为例,说明该电力拖动由哪些部分组成。
答:由电源一220v单相电源、电动机一中间为定子部分,外部为转子部分,、控制设备—调速开关、生产或工作机构—风叶等部分组成。
3—4 家用电器中的日光灯、电视机、电热水瓶能称为电力拖动系统吗?为什么? 答:不是,都没有电动机拖动。
3—5电力拖动系统中电动机产生的拖动转矩T与负载的负载转矩T L,在方向上有什么关系?若电动机在起动瞬间T=TL,则情况如何?若T>T L,则情况如何?若T<TL,则情况如何?答:p79,拖动转矩T与负载的负载转矩T L,在方向上刚相反。
由T= T L,d Q /dt= 0,系统静止或匀速运动状态T>TL,d Q /dt >0,系统处于加速状态T v TL,d Q /dt v 0 ,系统处于减速状态可判断电动机在起动瞬间T=T-,则电动机不能起动;若T>T-,则可以起动;若T<TL, 也不能起动。
3—6 从机械特性上看生产或工作机械负载可分为哪几类?各有什么特点?答:p80,可分为恒转矩负载、(包括反抗性恒转矩负载和位能性恒转矩负载)、恒功率负载、通风机型负载。
恒转矩负载特点是负载转矩的大小不随转速的变化而变化,恒功率负载特点是所需的转矩与转速成反比,功率近似不变,通风机型负载特点是转矩与转速的平方成正比。
3—7 什么叫三相异步电动机的机械特性曲线?答:p81,在以转矩T为横坐标,以转速n为纵坐标的直角坐标系中表示转矩T和转12速n 之间关系的曲线叫三相异步电动机的机械特性曲线。
电机及拖动PPT课件

A、增大励磁电流
B、减小励磁电流
C、保持励磁电流不变 D、使励磁电流为零
答案: C
2.2.2 反接制动
*电压反接制动 电压反接制动时接线如图所示。
开关S投向“电动”侧时,电枢接正极
电压,电机处于电动状态。进行制动时,开
关投向“制动”侧,电枢回路串入制动电R阻B 后,接上极性相反的电源电压,电枢回路内
定义:当 U 、U N I f时,I fN n f(I a )
由方程式可得
n
UN CeΦ
Ra CeΦ
Ia
Tn
Tem
n
T2
T0
0
Ia
)。 A、n=(U-IaRa)/Ceφ B、n=(U+IaRa)/Ceφ C、n=Ceφ/(U-IaRa) D、n=Ceφ/(U+IaRa) 答案: A
第二章直流电动机的电力拖动
电机及拖动
绪论 第一章 直流电机 第二章 直流电动机的电力拖动 第三章 三相异步电动机 第四章 三相异步电动机的电力拖动
为什么要学电机?
请同学们就电机的相关应用举例。
绪论
电机是利用电磁感应原理工作的机械。 电机常用的分类是按功能分,有发电机、电动机、变压器和 控制电机四大类;
归纳如下:
电机
变压器 直流电机
把电刷A、B接到直流电源 力形成逆时针方向的电磁转矩。
上,电刷A接正极,电刷B接负 当电磁转矩大于阻转矩时,电机
极。此时电枢线圈中将电流流过。转子逆时针方向旋转。
当电枢旋转到右图所示位置时
原N极性下导体ab转到S极下, 受力方向从左向右,原S 极下 导体cd转到N极下,受力方向 从右向左。该电磁力形成逆时 针方向的电磁转矩。线圈在该 电磁力形成的电磁转矩作用下 继续逆时针方向旋转。
电机及拖动基础 第5版 第五章 三相异步电动机的电力拖动
r1 r2'
s2
X1
X
' 2
2
当s, s0区间,Ts 当s继续至s1区间,T1/s
最 大 转 矩 点
临界转差率
sm
r2,
X1
X
' 2
最大转矩倍数
最大转矩
Tmax
m1 pU12
4f1
X1
X
' 2
过载能力
m
Tmax TN
一般:2.0~2.2
起动时,s=1,代入公式:
起动
转矩
Tst
m1 pU12 r2,
《电机及拖动基础》(4版) 三相异步电动机的电力拖动
例5-1 为何在农村用电高峰期间,作为动力设备的三 相异步电动机易烧毁?
解 电动机的烧毁是指绕组过电流严重,绕组的绝 缘因过热损坏,造成绕组短路等故障。由于用电高峰 期间,水泵、打稻机等农用机械用量大,用电量增加 很多,电网线路电流增大大,线路压降增大,使电源 电压下降较多,这样影响到农用电动机,使其主磁通 大为下降,在同样的负载转矩下,由电磁转矩的物理 表达式可知转子电流大为增加,尽管主磁通下降,空 载电流会下降,但它下降的程度远为转子电流增加的 程度大,根据磁通势平衡方程式,定子电流也将大为 增加,长期超过额定值就会发生“烧机”现象。
据题意
sm
r2, Rs't
X1
X
' 2
1
得
Rs' t
X1
X
' 2
r2,
(3.12
4.25
1.4)
5.97
《电机及拖动基础》(4版) 三相异步电动机的电力拖动
三、电磁转矩的实用表达式
第一章变压器

四、变压器的基本结构
由铁心、绕组、油箱、Байду номын сангаас缘套管及附件组 成。 1.铁心 铁心是变压器的磁路,由铁心柱和铁轭两 部分组成.铁心柱上安放绕组,铁轭使磁路闭 合. 由两面涂有绝缘漆的硅钢片叠成.有心式 和壳式两种结构.
2.绕组 绕组是变压器的电路,它由绝缘扁导线或圆 导线绕成,多为铜或铝线.高低压绕组均绕在 同一铁心 柱上,低压绕组在里侧靠铁心,以利 绝缘.
电能
(U1、I1)
磁场能
(变化的磁场)
电能
( U2、I2)
理想变压器的规律
原、副线圈中产生的感应电 动势分别是: E1=n1/ t E2=n2/ t U1=E1 U2=E2
I1
I2 n2 U2
U1 n1
E1 n1 E2 n2
U1 n1 U 2 n2
若不考虑原副线圈的内阻
(1) 理想变压器原副线圈的端电压之 比等于这两个线圈的匝数之比
变压器一次和二次绕组的电压比可认为是二者的 匝数比k U1 E1 N1 k U 20 E2 N 2
(三)空载电流i0 I0的主要作用是在磁路中产生磁动势建立磁通. 故又称励磁电流. i0的波形:
差900相位角,是纯无功分量.为磁化电流. Iμ与 E 1
Ih与
E 1
同相位,是一个有功分量,对应铁损.
U1 n1 U 2 n2
n2 >n1 U2>U1 ---升压变压器
n2 <n1 U2 <U1 ---降压变压器
理想变压器输出功率应等于输入功率
即:
P 出 = P入
U1I1=U2I2
I 1 U 2 n2 I 2 U 1 n1
(2)理想变压器原副线圈的电流跟它 们的匝数成反比
电力拖动与控制课后答案
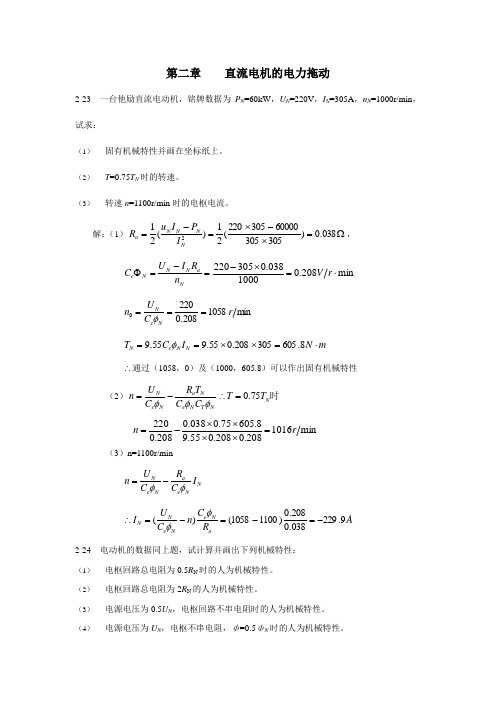
第二章 直流电机的电力拖动2-23 一台他励直流电动机,铭牌数据为P N =60kW ,U N =220V ,I N =305A ,n N =1000r/min ,试求:(1) 固有机械特性并画在坐标纸上。
(2) T =0.75T N 时的转速。
(3) 转速n =1100r/min 时的电枢电流。
解:(1)Ω=⨯-⨯=-=038.0)30530560000305220(21)(212N N N N a I P I u R , =-=ΦNa N N N e n R I U C min 208.01000038.0305220⋅=⨯-r V min 1058208.02200r C U n N e N ===φ m N I C T N N e N ⋅=⨯⨯==8.605305208.055.955.9φ∴通过(1058,0)及(1000,605.8)可以作出固有机械特性(2)时N NT N e Na N e N T T C C T R C U n 75.0=∴-=φφφ min 1016208.0208.055.98.60575.0038.0208.0220r n =⨯⨯⨯⨯-=(3)n=1100r/minN Ne a N e N I C RC U n φφ-=A R C n C U I a N e N e N N 9.229038.0208.0)11001058()(-=-=-=∴φφ 2-24 电动机的数据同上题,试计算并画出下列机械特性:(1) 电枢回路总电阻为0.5R N 时的人为机械特性。
(2) 电枢回路总电阻为2R N 的人为机械特性。
(3) 电源电压为0.5U N ,电枢回路不串电阻时的人为机械特性。
(4) 电源电压为U N ,电枢不串电阻,ф=0.5фN 时的人为机械特性。
注:R N =U N /I N 称为额定电阻,它相当于电动机额定运行时从电枢两端看进去的等效电阻。
解:(1)Ω===721.0305220N N N I U R 当外串后总电阻为0.5R n 时:T T C C R C U n NT N e nN e N 874.010585.0-=⋅-=φφφ (2)当电枢总电阻为Ω=442.12n R 时:T T C C R C U n NT N e nN e N 49.310582-=⋅-=φφφ (3)N U U 5.0=T T C C R C U n N T e aN e N 092.0529)(5.02-=-=φφ (4)N φφ5.0=T T C C R C U n N T e aN e N 368.02116)(25.05.02-=-=φφ2-25 Z2—71型他励直流电动机,P N =7.5kW , U N =110V , I N =85.2A , n N =750r/min ,R a =0.129Ω。
第六章:三相异步电动机的电力拖动
图6-6 定子串三相对称电阻人为机械特性
4、改变极对数时的人为机械特性 5、改变频率时的人为机械特性
图6-4 三相异步电动机变频时的人为机械特性
三、三相笼型异步电动机的起动方法
1、生产机械对异步电动机起动性能的要求 起动电流要小;起动转矩大。
2、直接起动——全压起动
起动一瞬间,相当于堵转运行,S=1;
结论
可以看成是Y-Δ起动的推广; 起动转矩大于Y-Δ起动,适用于重载起动;
采用不同的抽头比例,可以改变相电压;
体积小、质量小、可以经常起动、价格低廉,将 取代自耦变压器起动;
内部接线复杂。
仅适用于正常运行时定子绕组为Δ连接的电动机, 即额定电压为380/660V的笼型异步电动机。
在确定起动方法时,应根据电源允许的最大起动电流、 负载对起动转矩的要求及起动设备的复杂程度、价格 等条件综合考虑。
2)最大转矩Tm与定子电压的平方成正比,与频率的 平方成反比,与r2无关;
③ 过载倍数
m
Tm TN
④ 起动转矩
1.6-2.2(普通异步电动机)
2.2-2.8(起重、冶金用异 步电动机)
开始起动时,电机转速n=0,转差率s=1。
s=1
Tem
2
f1[(r1
m1 pU12r2' / s r2' / s)2 (x1
Ist =
U1
= U1
(r1 r2' )2 (x1 x2' )2 Zk
中大容量的笼型异步电动机若不满足直接起动的条 件,则必须通过降压,把Ist降到电源的允许电流值。
① 定子回路串电阻或电抗起动
•
Ist
rst xst rk
xk
•
电机及拖动基础第三章
第二节 生产机械的负载转矩特性
生产机械运行时常用负载转矩标志其负载的大小。不同的生产机 械转矩随转速变化规律不同,用负载转矩特性来表征,即生产机械的 转速n与负载转矩TL之间的关系n=f(TL)。各种生产机械特性大致可分 为以下三种类型。 一、恒转矩负载特性
恒转矩负载是指负载转矩TL的大小不随转速变化,TL=常数,这 种特性称为恒转矩负载特性。它有反抗性和位能性两种: 1.反抗性恒转矩负载
为恒定值,即
就是说,负载转矩与转速成反比。例如,一些机床切削加工, 车床粗加工时,切削量大(TL大),用低速档;精加工时,切削量小 (TL小),用高速档。恒功率负载特性曲线如图3-7所示。
三、通风机型负载特性 通风机型负载的特点是负载转矩的大小与转速n的二次方成正比,
即
式中K——比例常数。 常见的这类负载如鼓风机、水泵、液压泵等,通风机型负载特性
本章中首先介绍电力拖动系统的运动方程式,然后介绍生产机械 的转矩特性和三相异步电动机的机械特性,最后主要研究三相异步电 动机拖动应用的三大问题——起动、制动、调速。
第一节 电力拖动系统的运动方程式
电力拖动系统中所用的电动机种类很多,生产机械的性质也各不 相同。因此,需要找出它们普遍的运动规律,予以分析。从动力学的 角度看,它们都服从动力学的统一规律。所以,我们首先研究电力拖 动系统的动力学,建立电力拖动系统的运动方程式。 一、单轴电力拖动系统的运动方程式
曲线如图3-8所示。 必须指出,以上三类是典型的负载特性,实际生产机械的负载特
性常为几种类型负载的综合。例如起重机提升重物时,电动机所受到 的除位能性负载转矩外,还要克服系统机械摩擦所造成的反抗性负载 转矩,所以电动机轴上的负载转矩TL应是上述两个转矩之和。
电力拖动基础总结-
他励直流电动机的制动
n
• 能耗制动
nG 327 C D (R eC a 5 T R 2 z)d dn tTzC (R eC aT R 2z)
0 -nz
tT
t
n n z(1 e t/T tM ) n se t t/T tM
Ia Iz
nRa Rz Ce
Ia
0
tT
电力拖动基础总结
杜少武
2019/9/17
1
第一章 电力拖动系统的动力学基础
运动方程式
• 直线运动
dv
F Fz
m dt
• 旋转运动 • 转动惯量
T Tz
J
d
dt
J m2 GD2 单位为
4g kg ·m2
T
Tz
GD2 dn 375dt
式中:GD2 = 4gJ 称为飞轮惯量(N ·m2 )。
2019/9/17
16
第二章 直流电动机的电力拖动
过渡过程能量损耗
4) 空载反转过程
ΔA sxtJ(0)d
1) 空载起动
Δ A T3 0 0J( 0 )d 2J 0 2
5) 减少过渡过程能量损耗方法
Δ A st0 0J( 0 )d 1 2J 0 •–
2019/9/17
忽略R1,则
T 2Tm s/ sm sm / s
20
第三章 三相异步电动机的机械特性及各种运转状态
三相异步电动机固有机械特性与人为机械特性
1) 固有机械特性
• 几个特殊运行点
1)起始点A,特点:n = 0(s = 1),T = Tst, I1st=(4~7)IN;
2)额定工作点B ,特点:n = nN(s=sN),T = TN,I1 = IN ;
电力拖动与控制课件:第三章 三相异步电动机的电力拖动
第Ⅰ象限为 电动机运行 状态
图3-2 异步电动机的机械特性
第Ⅱ象限为 发电回馈制 动状态
r2
T
m1 p
1
U12
r1
r2 s
2
s
x1
x2 2
几个特殊点:
1)起动点A
n 0, s 1
起动转矩
Tst
m1 p
1
U12
r1
r22
r2
x1
x2 2
起动转矩倍数
KT
Tst TN
KT反映了电动机的起动能力。
反比。
定义过载倍数
T
Tmax TN
它反映了电动机短时过载的极限。
3)额定运行点C
sN
n1 nN n1
4)同步转速点D
TN
9550
PN nN
s0
n
n1
60 f1 p
T 0
又称为理想空载点。
三、机械特性的实用表达式
将电磁转矩公式与最大转矩公式相除得
r2
T
m1 p
1
U12
r1
r2 s
2
s
m1 p 2
N1kw1
;
kw1—基波绕组系数
N1 —定子绕组每相串联匝数 cos2—转子侧的功率因数
物理表达式表明,三相异步电动机的电磁 转矩是由磁通与转子电流的有功分量相互作 用产生的。
物理表达式反映了异步电机电磁转矩产生 的物理本质,适用于对异步电动机机械特性 做定性分析。
二、机械特性的参数表达式
3)起动设备力求结构简单,运行可靠,操作方便; 4)起动过程的能量损耗越小越好,起动时间越短越
好。 最主要的要求是在起动电流比较小的情况下 得到较大的起动转矩。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
化简后可得
Rst r (a 1) x rk
2
当s 1时
' r 1 2 1 2 T m1 p( ) 2 2 ' 2 1 s[r1 1 ( L1 L2 ) ] s
u1
2.最大转矩和临界转差率
Sm
pm1
r2'
' r12 (x1 x 2 )2
Tmax
1
u
2 1
1
' 2 2[ r1 r12 ( x1 x 2 )
I1ST 1 电源总容量( KVA ) 3 I N 4 起动电机容量 KW
I1St / I N K I 为笼型异步电动机的起动电流倍数
2、降压起动——大中容量电动机轻载起动方法
定子电路串电阻器或电抗器降压起动 (1)起动线路
笼型异步电动机电阻减压起动原理图
(2)起动电流和起动转矩
三、机械特性的实用表达式
由
r 2Tmax (1 sm 1 ) r2 T sm s r 2 sm 1' sm s r2
如忽略 r1 ,得到机械特性的实用表达式为:
2Tmax T sm s sm s
机械特性的近似计算公式:
2Τ max Τ s sm
其中:
sm 2T s N
曲线的形状可分析如下。
' s r 1 2 T m1 p( ) 2 1 (sr1 r2' ) 2 s 212 ( L1 L'2 ) 2
u1
L1
1
' x2
x1
—定子的漏电感。
L'2
1
—转子的漏电感。
当很s 小时
s1 T m1 p ( ) s ' 1 r2 u1
第二节 三相异步电动机的起动
一、对异步电动机起动性能的要求
(1)具有足够大的起动转矩 Tst 。 (2)在保证一定大小的起动转矩的前提下,电动机的起 动电流 I1st 越小越好; (3)起动设备力求结构简单,运行可靠,操作方便; (4)起动过程的能量损耗越小越好,起动时间越短好。
二、异步电动机的固有起动特性
rK r1 r2 , x K x1 x2 , 分别为每相的短路电阻 式中, 和电抗。
(3)起动电阻或电抗的计算
设起动时,定子绕组串入的电阻为 Rst
则
将
uN ' I 1st
I1st ,
2 ( Rst rk ) 2 xk
I1st
2
代入上式
uN 2 ( Rst rk ) x a a rk2 xk I1st
p pM
PM
为电磁功率它有两种表达式
1 2f1
' ' P m E M 1 2 I 2 cos 2 ' r PM m1I 2' 2 2 s ' 分别为折算到定子边的转子电阻和漏抗 r2' 和x2 cos 2 为转子边的功率因数。
一、机械特性表达式
1、物理表达式
pm1 cos 2 CT m I 2 cos 2 T N1K w1 m I 2 2 pm1 CT N1 K 1 —是常数。 2
0.64Tst
Tst
异步电动机降压时的人为机械特性
Tmax
(2)转子电路中串对称电阻时的人为特性
sm sm1
绕线转子异步电动机转子电路串接对称电阻 a)电路图 b)人为机械特性
sm2
(3)定子电路串接电阻或电抗的人为特性
s'm sm Xst≠0
Xst=0
T'max Tmax
异步电动机定子电路串接对称电抗 a)电路图 b)人为机械特性
不论是鼠笼电机还是绕线式电机,如果不采取措施 直接接入电源起动,这样的起动特性称为固有起动特性, 主要指起动电流 和起动转矩 。 I1st KT
I1st u1 (r1 r ) ( x1 x )
' 2 2 ' 2 2
KT 0.9 1.3
三、 鼠笼式异步电动机的起动
直接起动 降压起动 1、直接起动——小容量电动机起动方法 直接起动也称为全压起动。若能满足下列要求,就允 许直接起动。
三相异步电动机的固 有机械特性是指异步 电动机在额定电压和 额定频率下,按规定 的接线方式接线,定、 转子外接电阻为零时 的转速n与电磁转矩T 的关系。 三相异步电动机的固有特性
人为机械特性 (1)降低定子电压时的人为机械特性
sm
0.5UN
0.8UN
UN
0.25Tmax
0.64Tmax
0.25Tst
2 1
' 2
Tst 与 TN 之比称为起动转矩倍数 K T ,即
Tst KT TN
4.稳定运行范围 负 载 转 矩 特 性 1 为 恒 转 矩 负 载
n
n0
1
A
n f (T )
B
2
C
o
TZ
T
异步电动机拖动系统稳定运行点
负 载 转 矩 特 性 2 为 通 风 机 类 负 载
5.固有机械特性和人为机械特性
式中(+)为电动状态,(-)为发电状态。
通常
ห้องสมุดไป่ตู้
r1 ( x1 x ) ,则有:
' 2
Sm
' r2 x1 x 2
Tmax
pm 1
1
1 u ' 2( x1 x2 )
2 1
3.起动转矩
Tst
pm1
1
r u ' 2 ' 2 (r1 r2 ) ( x1 x2 )
UN 设加在定子绕组上的电压为 U1 ,并令 U 1
令
(r1 r ) ( x1 x )
' 2 2 ' 2 2
r x zk
2 k 2 k
直接起动时, 降压起动时, 由式
I 1st
I
' 1st
uN zk
UN I1st U1 zk z k
Tst
2
' Tst
第三章 三相异步电动机的电力拖动
第一节 三相异步电动机的机械特性 第二节 三相异步电动机的起动 第三节 三相异步电动机的制动 第四节 第五节 三相异步电动机的四象限运行(应用实例) 三相异步电动机拖动系统的调速
第一节 三相异步电动机的机械特性
三相异步电动机的电磁转矩
1 式中: p为极对数,
T
N1
—定子绕组每相串联匝数。
K w1 —为基波绕组系数。
二、机械特性的参数表达式
1、机械特性参数表达式的推导
异步电动机的T形等效电路
、
异步电动机的机械特性
第一象限,n<n1, T 0
,为电动机运行状态
第二象限,n n1 , T 0 ,为发电回馈制动状态
S m 称为临界转差率
T s