上海同济大学附属存志学校物理第十一章 简单机械和功易错题(Word版 含答案)

上海同济大学附属存志学校物理第十一章简单机械和功易错题(Word版含答
案)
一、初三物理第十一章简单机械和功易错压轴题提优(难)
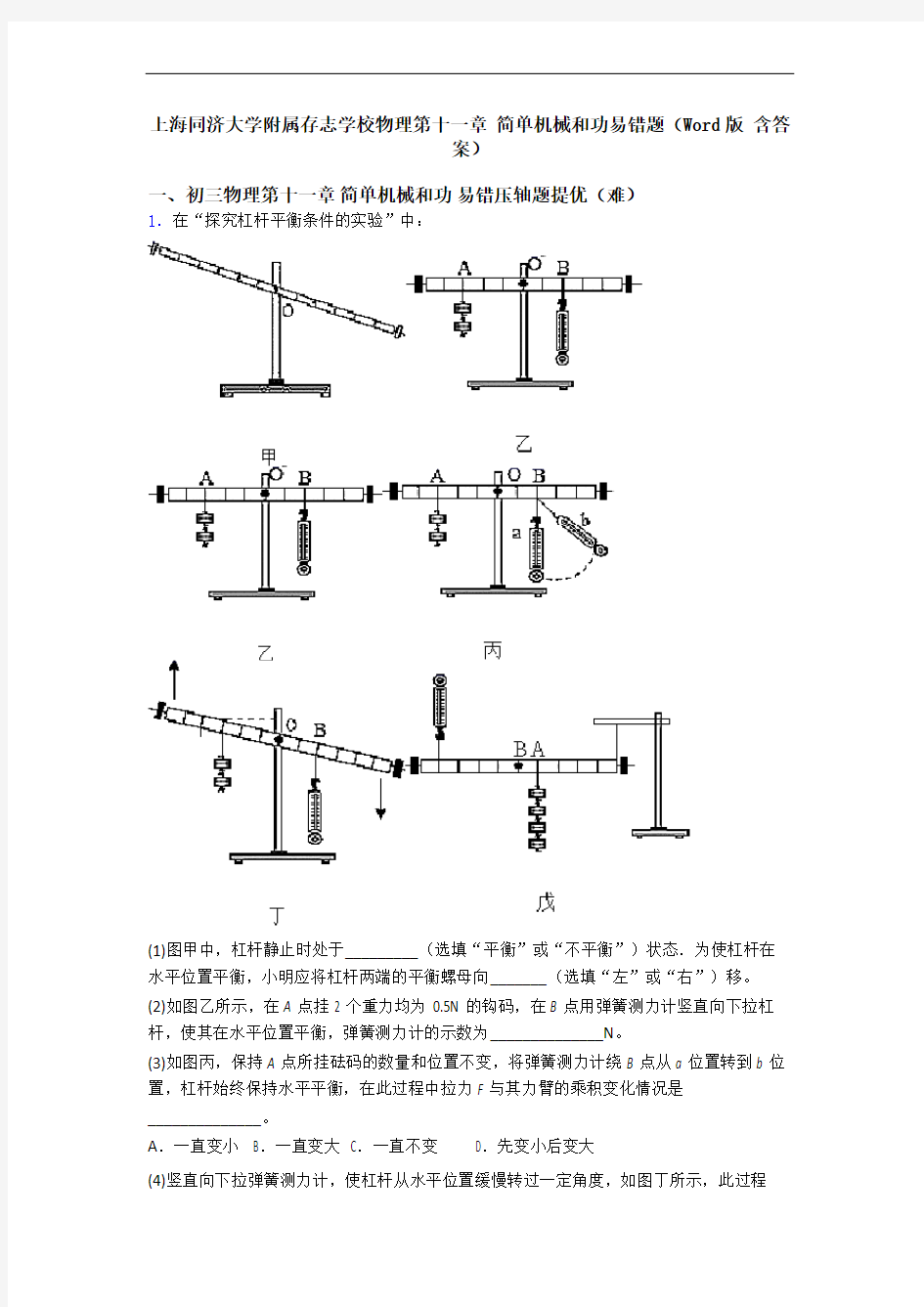
1.在“探究杠杆平衡条件的实验”中:
(1)图甲中,杠杆静止时处于_________(选填“平衡”或“不平衡”)状态.为使杠杆在水平位置平衡,小明应将杠杆两端的平衡螺母向_______(选填“左”或“右”)移。(2)如图乙所示,在A 点挂 2 个重力均为 0.5N 的钩码,在B 点用弹簧测力计竖直向下拉杠杆,使其在水平位置平衡,弹簧测力计的示数为______________N。
(3)如图丙,保持A 点所挂砝码的数量和位置不变,将弹簧测力计绕B 点从a 位置转到b 位置,杠杆始终保持水平平衡,在此过程中拉力F 与其力臂的乘积变化情况是
______________。
A.一直变小 B.一直变大 C.一直不变 D.先变小后变大
(4)竖直向下拉弹簧测力计,使杠杆从水平位置缓慢转过一定角度,如图丁所示,此过程
中,拉力的力臂_________,弹簧测力计的示数__________(均选填“变大”、“变小”或“不变”)。
(5)若要使图丁状态下的弹簧测力计读数减小,可将弹簧测力计绕B 点 _____(选填“顺时针”或“逆时针”)方向转动一个小角度。
(6)小华用如图戊装置进行探究,发现总是无法得到教材上所列出的杠杆平衡条件,其原因是_____________________________________。
(7)小明用如图戊所示的实验装置研究“杠杆的机械效率”.实验时,将总重为G 的钩码挂在杠杆A 处,竖直向上匀速拉动弹簧测力计,钩码上升的高度为h,弹簧测力计的示数为F,其移动的距离为s,则杠杆的机械效率η=__________(用题中字母表示)。若将钩码移动到B 点,仍将它匀速提升h 的高度,则此时弹簧测力计的示数F'________(选填
“>”“=”或“<”)F,杠杆此时的机械效率η′___________η(选择“>”、“=”或“<”)。
【答案】平衡左 1.5 C 变小不变顺时针杠杆自重对杠杆平衡有影响
Gh
×100% > >
Fs
【解析】
【分析】
【详解】
(1)[1]杠杆处于静止状态或匀速转动状态都为杠杆的平衡状态;所以,图甲中实验前没挂钩码时,杠杆处于静止的平衡状态。
[2]由于杠杆左端上翘,调节时重心应向左移动,应将杠杆两端的平衡螺母向左移,使杠杆在水平位置平衡。
(2)[3]如图乙所示,在刻度线A处挂两个钩码,在刻度线B处用调好的弹簧测力计竖直向下拉杠杆,杠杆在水平位置时,每个钩码为G=0.5N,每小格为L,根据杠杆的平衡条件知道,即
2G×3L=F×2L
2×0.5N×3L=F×2L
解得F=1.5N
(3)[4]将测力计绕B点从a位置转动到b位置过程中,钩码的重力不变,其力臂OA不变,即阻力与阻力臂的乘积不变;由于杠杆始终保持水平平衡,所以根据杠杆的平衡条件知道,拉力F与其力臂的乘积也是不变的。
故选C。
(4)[5][6]力臂等于支点到力的作用线的距离,竖直向下拉弹簧测力计,使杠杆从水平位置缓慢转过一定角度,如图丁所示,此过程中,弹簧测力计拉力的力臂变小,钩码对杠杆拉力的力臂也变小,但是根据三角形的相似性,动力臂和阻力臂的比值是不变的,所以拉力大小不变。
(5)[7]根据杠杆平衡条件知道,要使弹簧测力计读数减小,在阻力和阻力臂不变时,需要增大动力臂,当弹簧测力计与杠杆垂直时,动力臂最长,拉力最小,所以需要将弹簧测力计
顺时针转动。
(6)[8]
利用如图戊所示装置进行探究,杠杆的重心没有通过支点,杠杆的自重对杠杆平衡有影响。 (7)[9]由W W η=
有
总
知道,将总重为 G 的钩码挂在杠杆 A 处时,杠杆的机械效率 W Gh W Fs
η=
=
有总
[10]由图示知道,将钩码移动到B 点时,阻力和动力臂都不变,阻力臂增大,由1122Fl F l =知道,动力将增大,即
F ′>F
[11]将钩码移至B 点,提升相同高度,有用功相同,弹簧测力计竖直移动的距离不同,B 点时杠杆上上升的高度小些,做的额外功小些,所以机械效率变大,即
η′>η
2.小军利用如图所示器材测定滑轮组的机械效率,他记录的实验数据如下表。
次数 物重G /N
绳自由端的拉力F /N 钩码上升的高度h /cm 绳自由端移动的距离s /cm 机械效率η/%
1 1.0 0.5 10 30
2
2.0
0.9
5
15
74.1
(1)根据记录表格中提供的信息,组装图中小军使用的滑轮组______;
(2)根据给出的实验数据,计算出第一次的机械效率并填入表格中______;(结果保留三位有效数字)
(3)同一个滑轮组,在两次实验过程中机械效率不同,主要原因是______。
【答案】
66.7 两次提升的物重不同
【解析】 【分析】 【详解】
(1)[1]当钩码上升的高度为10cm 时,绳自由端移动的距离为30cm ,则绳子承担重物的段数
30cm 310cm
s n h =
== 绳子的段数是奇数,从动滑轮开始绕起,如图所示
(2)[2]第一次的机械效率
111111N 0.1m
100%100%100%66.7%0.5N 0.3m
W G h W F s η?=
?=?=?≈?有1有1总 (3)[3]实验中两次测得的机械效率使用的是同一个滑轮组,即绳重、摩擦、滑轮重是相同的,所以导致机械效率不同主要原因是两次提升的物重不同。
3.如图所示是小明和小红利用刻度均匀的杠杆探究“杠杆平衡条件”的实验装置。
(1)在实验前,杠杆静止在图甲所示的位置,此时杠杆处于_______(选填“平衡”或“不平衡”)状态;调节平衡螺母使杠杆在水平位置平衡的目的是消除杠杆自重对实验的影响,同时方便___________;
(2)杠杆平衡后,小明在左右两侧分别挂上如图乙所示的钩码,杠杆不能在水平位置平衡,在不增加钩码且不改变钩码悬挂点位置的前提下为了使杠杆重新在水平位置平衡,只
需将____________即可;
(3)为获得更多组数据,他们取下右侧钩码,小明和小红分别设计了两种实验方案,小明的方案如图丙所示,小红的方案如图丁所示。你认为__________(“小明”或“小红”)的方案更合理,理由是___________;
(拓展)探究杠杆的平衡条件后,小明又利用杠杆测量了石块的密度,实验装置如图所示。
实验步骤如下:
①将石块悬挂在杠杆左侧,通过调节细线长度使石块缓慢浸没在下方裝满水的溢水杯中(未触底),同时用质量忽略不计的薄塑料桶接住溢出的水;
②将薄塑料桶悬挂在杠杆右侧,调节塑料桶的悬挂位置,使杠杆在水平方向平衡,如图所示;
③测量出AB 两悬挂点距支点O 的距离分别为10m 和15cm ,则石块密度为___________kg/m 3。
【答案】平衡 测量力臂 左侧的钩码去掉一个 小明 排除测力计的重力对实验的影响 2.5×103 【解析】 【分析】 【详解】
(1)[1]杠杆静止时,无论杆身是否水平,都为杠杆的平衡状态。
[2]杠杆在水平位置平衡,其力臂和杆身重合,可以方便测量力臂的大小。
(2)[3]在乙图中,杠杆左右两侧所挂钩码的重力可分别视为动力和阻力,两侧钩码的悬挂点可分别视为动力臂和阻力臂,根据杠杆的平衡条件1122Fl F l =可知,只需将左侧的钩码去掉一个即可满足杠杆在水平位置平衡。
(3)[4][5]对比丙、丁两图可知,小明的实验方案更加理想;因为弹簧测力计本身受到重力,小明的方案可以排除测力计的重力对实验的影响。
(3)①[6]设石块排开的水的重力为G 水,由阿基米德原理可知,石块受到的浮力
F G =浮水
水中的石块为平衡状态,故其对绳的拉力
F G F G G =-=-石石浮水
根据杠杆和平衡条件可得
F OA
G OB ?=?水
即
153
102
G G OB cm G OA cm -===石水水 由上式整理可得
3
2
V g V g V g ρρρ-=石石水水水水
由于石块排开水的体积和石块自身体积相等,所以上式可简化为
3
2
ρρρ-=石水水 所以石块的密度
33335
5 1.010kg/m 2.510kg/m 22
ρρ==??=?石水
4.小明想测量常见的两种简单机械的机械效率。
(1)他先测滑轮组的机械效率,所用装置如图所示,实验中每个钩码重2N ,测得的数据如下表:
次数 钩码总重G /N 钩码上升的高度h/m 测力计示数F /N 测力计移动距离s /m 机械效率率η
1 4 0.1 1.8 0.3
2 6 0.1 2.4 0.
3 83% 3
4 0.1 1.4 0.
5 57% 4
4
0.2
1.4
1.0
57%
①在实验中,测绳端拉力F 时,应尽量竖直向上_____拉动弹簧测力计;
②第1次实验测得的机械效率为________( 保留整数),第4次实验是用____图做的(选填“a ”、“b ” 或“c ”);
③分析第1、3次实验数据可得结论:___________________;
(2)接着小明用如图所示的装置探究杠杆的机械效率,每个钩码的质量为m ,O 为支点(支点处的摩擦不计)。
①他先将2只钩码悬挂在B 点,在A 点竖直向上匀速拉动弹簧测力计,拉力为F 1,机械效率为η1;
②然后他将这2只钩码悬挂在C 点,在A 点竖直向上匀速拉动弹簧测力计,使C 点上升高度与第一次相同,则此时弹簧测力计的示数F 2将____ (选填 “>”“=”或“<”) F 1; [拓展]对比杠杆实验的第①②两步,判断第②步中杠杆的机械效率η2如何变化并说明理由_________。
【答案】匀速 74% c 使用不同的滑轮组,提升相同的重物,动滑轮越重,滑轮组的机械效率越小 > 见详解 【解析】 【分析】 【详解】
(1)[1]测绳端拉力F 时, 应尽量竖直向上匀速拉动弹簧测力计,使物体处于平衡状态。 [2]第1次实验测得的机械效率为
4N 0.1m
100%100%100%74%1.8N 0.3m
W Gh W Fs η?=
?=?=?=?有用总 [3]第4次实验,钩码上升的高度为0.2m ,测力计移动距离为1.0m 。则绳子股数为
1.0m
=50.2m
s n h =
=绳 第4次实验是用图c 做的。
[4]分析第1、3次实验数据,提升重物相同,但第1次实验,应用图a 一个动滑轮的滑轮组进行试验,第3次实验,应用图c 两个动滑轮的滑轮组进行试验,第一次机械效率高于第3次实验数据,可得结论:使用不同的滑轮组,提升相同的重物,动滑轮越重,滑轮组的机械效率越小
(2)[5]钩码从B 点移动到C 点,阻力不变阻力臂变长,弹簧测力计位置不变,动力力臂不变,根据杠杆平衡条件可知,弹簧测力计的示数将变大,则F 2>F 1。
[6] η2变大,因为C 点被提的高度相同,克服杠杆自身重力所做的额外功相同,钩码提升的高度增加,有用功变大,根据
100%W W W η=?+有
有额
可知η2变大。
5.小明在“测量滑轮组的机械效率”的实验中,利用如图所示的滑轮组进行了4次测量,测得数据如下表所示:
次数钩码所受的重
力G/N
钩码提升的
高度h/m
拉力F/N
绳端移动的距离
s/m
机械效率η
1 1.00.10.80.431.25%
2 1.00.20.80.831.25%
3 2.00.1 1.20.441.67%
4 3.00.1 1.5
(1)试验中应沿着竖直方向______(选填“加速”或“缓慢”)拉动弹簧测力计,且在弹簧测力计______时读数;(选填“匀速运动”或“静止”)
(2)根据表中的数据计算得出第4次实验时绳端移动的距离s=_______m,机械效率
η=_______;
(3)通过比较1、3和4三次实验数据得出:同一滑轮组,物重越大,滑轮组的机械效率
_____;
(4)在忽略摩擦力和绳重的前提下,通过第1次数据可算出动滑轮的重力为_____N;
(5)以下选项中不影响滑轮组机械效率的因素是______
A.动滑轮的重力 B.绳子与滑轮之间的摩擦 C.物体上升的高度
【答案】缓慢匀速运动 0.4 50% 越大 2.2 C
【解析】
【分析】
【详解】
(1)[1]为了使弹簧测力计的示数大小等于绳端的拉力大小,试验中应沿着竖直方向缓慢拉动弹簧测力计。
[2]假设弹簧测力计静止时读数,测力计没有测出绳子与滑轮间的摩擦,测得的拉力偏小,即没有考虑到摩擦对滑轮组机械效率的影响,所以需要弹簧测力计匀速运动时读数。(2)[3]从图中可以看到,四条绳子托着动滑轮,第4次实验时,钩码提升的高度是0.1m,绳端移动的距离是0.4m。
[4]第4次实验时滑轮组做的有用功
3N 0.1m 0.3J W Gh ==?=有用功
滑轮组做的总功
1.5N 0.4m 0.6J W Fs ==?=总
滑轮组的机械效率
0.3J
100%100%50%0.6J
W W η=
?=
?=有用功总功
滑轮组的机械效率是50%。
(3)[5]通过比较1、3和4三次实验数据可知,物重越大,滑轮组的机械效率越大。 (4)[6]忽略摩擦力和绳重,四条绳子托着动滑轮,那么
4G G F +=动
代入数据可得
1N 40.8N G +=?动
解得 2.2N G =动。 (5)[7]根据
Gh Gh G
Fs nFh G G η=
==+动
可知动滑轮的重力影响滑轮组机械效率,物体上升高度不影响滑轮组机械效率,绳子与滑轮之间的摩擦将增加额外功的比例,影响滑轮组机械效率。 故选C 。
6.在“探究杠杆平衡条件”的实验中,杠杆刻度均匀,每个钩码的重力均为0.5N 。 (1)实验开始时,杠杆如图甲所示处于静止状态。为使杠杆在水平位置平衡,应将两端的平衡螺母向______移动(选填“左”或“右”);
(2)调节杠杆水平平衡后,如图乙所示,在M 点挂上2个钩码,在N 点挂上3个钩码。此时,杠杆在水平位置______(选填“平衡”或“不平衡”);
(3)用弹簧测力计和钩码配合使用,也可以探究杠杆平衡条件。如图丙所示,用弹簧测力计在A 处竖直向上拉杠杆,使其在水平位置平衡,此时弹簧测力计示数为______N 。
【答案】左 不平衡 1.2 【解析】 【分析】
(1)如果杠杆左端下沉,应向右调节平衡螺母,如果杠杆右端下沉,应向左调节平衡螺母,
使杠杆在平衡位置平衡;
(2)杠杆是否平衡,取决于两边力和力臂的乘积是否相等,若1122
Fl F l
=,杠杆平衡;若1122
l F F l
≠,杠杆就不平衡,会沿力和力臂乘积大的力的方向转动;
(3)左侧钩码对杠杆的作用力向下,使杠杆沿逆时针转动,则弹簧测力计施加的力使杠杆沿顺时针转动,保持杠杆平衡;杠杆平衡条件1122
Fl F l
=计算出弹簧秤的示数,判断弹簧测力计的位置。
【详解】
(1)[1]图甲中,杠杆右端下沉,为了使杠杆在水平位置平衡,应将杠杆两端的螺母向左调。
(2)[2]图乙中,设一格长度为L,一个钩码重G,则有
2433
G L G L
?
即右边的力和力臂的乘积大于左边的力和力臂的乘积,杠杆不能在水平位置平衡,会沿顺时针方向转动。
(3)[3]丙图中钩码的重力
440.5N2N
G G
==?=
由杠杆平衡条件1122
Fl F l
=可得
拉力在A处竖直向上拉杠杆,使其在水平位置平衡,则
2
1
2N3
1.2N
5
G L L
F
L L
??
===
此时弹簧测力计示数为1.2N。
【点睛】
本题主要考查对“探究杠杆平衡条件”的实验内容的了解。杠杆的平衡条件:动力?动力臂=阻力?阻力臂,即1122
Fl F l
=;运用此条件进行杠杆平衡的计算。
7.如图所示,是“探究杠杆的平衡条件”的实验装置。
(1) 实验前,杠杆右端偏高,应将两端的螺母向________调节,使杠杆在_______位置平衡;
(2) 杠杆平衡后,在左侧挂两个钩码,每个钩码重1N,在右端竖直向下拉着弹簧测力计,使杠杆在水平位置重新平衡,如图所示。此时弹簧测力计的示数F=_____________N(弹簧测力计自重不计);
(3) 当弹簧测力计处于图中的虚线位置时,若使杠杆在水平位置平衡且弹簧测力计的示数仍等于F,应将钩码向_________(填“左”或“右”)移动适当的距离;
(4) 小华想到若铁架台不是在水平桌面上,而是在略微倾斜的桌面上是否影响实验呢?经小组分析不在水平桌面上_______ (填“影响”或“不影响”)实验过程。
【答案】右水平 3 右不影响
【解析】
【分析】
【详解】
(1)[1][2]实验前杠杆右端偏高,应将两端的平衡螺母右调节,直到杠杆在水平位置平衡,这样在实验操作过程中,才能读出力臂。
(2)[3]设杠杆每一小格的长度为l,据杠杆的平衡条件有
2N?3l=F?2l
所以此时弹弹簧测力计的示数
F=3N
(3)[4]若使弹簧测力计处于图中虚线处,则弹簧测力计对杠杆的力的力臂变小,而弹簧测力计的示数不变,钩码的重力不变,据杠杆的平衡条件,若想让杠杆在水平位置平衡,须向右适当移动钩码。
(4)[5]铁架台放在略微倾斜的桌面上,不会影响实验过程。即使铁架台不是水平放置,但依然可调节杠杆在水平位置平衡。
8.小华利用如图所示的装置来探究“杠杆的平衡条件”。
(1)实验前杠杆静止在如甲图所示位置,则此时杠杆是否平衡?____(选填“是”、“否”),杠杆的重心是否在支点上?________(选填“是”、“否”),若使杠杆在水平位置平衡,左边的螺母应向______移动;
(2)如乙图,杠杆调节平衡后,小华在B点悬挂了3个钩码,若要使杠杆再次平衡,D点应该挂_____个钩码。如果此时两边再各增加一个钩码,则杠杆将向_______边倾斜;
(3)如图丙所示,小华在A、C两点分别悬挂等重的载物盘,制作了一个天平,左盘放物体,右盘加减砝码,此天平是利用了哪一类杠杆制作而成的?________。假如支点O因某种原因向右偏移,则天平的测量值____真实值(选填“大于”“等于”或“小于”)。【答案】是否右 4 左等臂杠杆大于
【解析】
【分析】
【详解】
(1)[1]杠杆静止在如甲图所示位置保持静止状态,受力平衡,则此时杠杆是平衡的。
[2]如图甲所示,此时杠杆左端下沉,说明杠杆的重心不在支点上,而是在支点的左端的某一点。
[3]如图甲所示,此时杠杆左端下沉,右端上翘,则应该将平衡螺母向右调使杠杆重新平衡。
(2)[4]如图乙所示,假设一个钩码重为G ,杠杆上一格为L ,在B 点悬挂了3个钩码,则杠杆左端为
3412G L GL ?=
根据杠杆平衡条件有
1243GL
G L
=? 即需要在D 点挂4个钩码才能使杠杆重新平衡。 [5]如果此时两边再各增加一个钩码,杠杆左端为
4416G L GL ?=
右端为
5315G L GL ?=
左端大于右端,即杠杆向左边倾斜。
(3)[6]如图丙所示,在A 、C 两点分别悬挂等重的载物盘,即力的方向与杠杆垂直,则A 、C 两点到支点的距离即为力臂,由图可知两力臂相等,杠杆为等臂杠杆,所以此天平是利用了等臂杠杆制作而成。
[7]支点O 因某种原因向右偏移,杠杆不再是等臂杠杆,变成了费力杠杆,则C 点的力臂减小,根据杠杆的平衡条件可知,C 点需要更大的力,即会导致天平的测量值大于真实值。
9.如图是某学习小组探究“斜面的机械效率”实验装置及实验数据记录表:
(1)沿斜面拉动木块时,为使测力计的示数稳定,应尽量使木块做__运动。
(2)比较表中“物块重”和“__”两栏对应的数据,可知斜面是一种省力的简单机械。 (3)第三次实验时即“最陡”时,此次实验把物块拉上去的机械效率是__。 (4)分析第1次实验的数据即“较缓”时可知,斜面对物体摩擦力为__N 。
【答案】匀速直线 沿斜面拉力 625%. 4 【解析】 【分析】 【详解】
(1)[1]沿斜面拉动木块时,为使测力计的示数稳定,应尽量使木块做匀速直线运动。 (2)[2]比较表中“物块重”和“沿斜面拉力”两栏对应的数据,可知斜面是一种省力的简单机械。
(3)[3]第三次实验时即“最陡”时,此次实验把物块拉上去的机械效率是
10N 0.5m =
=
==62.5%8.0N 1m
W Gh W Fs η??有总
(4)[4]由表中第1组实验数据可知
==5.0N 1m=5J W Fs ?总 ==10N 0.1m=1J W Gh ?有用
额外功
=-=5J-1J=4J W W W 额总有用
由W fs =额,得摩擦力大小
4J
=
=
=4N 1m
W f s
额
10.如图为测量滑轮组机械效率的实验装置,钩码总重6N 。
(1)实验时要竖直向上______拉动弹簧测力计,由图可知拉力大小为______N ,若钩码上升的高度为8cm ,则弹簧测力计向上移动______cm ,该滑轮组的机械效率为_________; (2)在弹簧测力计静止时进行读数,则他这样得出的机械效率与实际值相比_____;(选填“偏小”、“偏大”或“相等”)
(3)若仅增加钩码的个数,该滑轮组的机械效率将________。(选填“增大”、“减小”或
“不变”)
【答案】匀速 2.4 24 83.3 % 偏大 增大 【解析】 【分析】 【详解】
(1)[1]在实验中,应竖直向上匀速拉动弹簧测力计,才能准确测出拉力的大小。 [2]由图可知,弹簧测力计的分度值为0.2N ,所以其为2.4N ,即拉力的大小为2.4N 。 [3]由图可知,滑轮组承重绳子的根数为3根,当钩码上升8cm ,则弹簧测力计向上移动的距离为
8cm×3=24cm
[4]实验中,所做的有用功
W 有=Gh =6N×0.08m=0.48J
通过滑轮组所做的总功
W 总=Fs =2.4N×0.24m=0.576J
则机械效率
0.48J
83.3%0.576J
W W η=
==有总 (2)[5]实验中,若在静止时读弹簧测力计的示数,会造成拉力比实际的拉力小,因为静止时绳子与滑轮间没有摩擦,那么求出的总功也会偏小,而有用功的大小不变,那么机械效率会偏大。
(3)[6]实验中仅增大钩码的个数,那么有用功随之增大,而额外功不变,那么机械效率会增大。
11.某实验小组进行测量滑轮组机械效率的实验,先用弹簧测力计测量钩码所受的重力G (如图甲),再按图乙所示的连接方式组装好滑轮组,并分别记下钩码和弹簧测力计的起始位置:
(1)如图乙中,为了测量绳子自由端的拉力F ,A 同学在缓慢匀速提升时读数,B 同学在弹簧测力计静止时读数,然后把测得各个量数值,代入机械效率的公式,计算出机械效率的值,这两位同学_______(选填“A ”或“B ”)操作是正确的;
(2)按照A 同学的测量方法,测出的拉力F 与钩码所受重力G 的大小关系为F ______(选填“大于”、“小于”或“等于”)
3
G ;
(3)实验中要分别记下钩码和弹簧测力计的起始位置,是为了_________。 【答案】A
大于 测量钩码和弹簧测力计移动的距离 【解析】 【分析】
(1)在使用滑轮组时,滑轮组还要克服一些机械摩擦,所以要测量滑轮组的机械效率,需使物体上升进行读数。
(2)使用滑轮组时,拉力不仅要克服物体的重力,还要克服动滑轮的重力及机械摩擦。
(3)要测滑轮组的机械效率,需测出G 、h 、F 、s ,根据公式100%Gh
Fs
η=
?计算。所以需要测量钩码和弹簧测力计移动的距离,从而计算有用功和总功。 【详解】
(1)[1]为了测量滑轮组提升物体时的机械效率,所以需在缓慢匀速提升时读数,则A 同学操作正确。
(2)[2]由图知,滑轮组由3段绳子承担物重,则3
G
F =,但其成立的条件是不考虑机械自重和摩擦,若考虑的话拉力F 大于
3
G 。 (3)[3]为了测量钩码和弹簧测力计移动的距离,从而计算有用功和总功,应分别记下钩码和弹簧测力计的起始位置。
12.如图甲所示是一款自拍神器,它能够在一定长度内任意伸缩,使用者只需将手机固定在伸缩杆上,通过按键或遥控器就能实现多角度自拍。自拍杆主要有伸缩杆、三角支架、底端按键和蓝牙遥控自拍器。
(1)蓝牙遥控自拍器是一种短距离通信的无线电技术,它是利用______(“电磁波”或“超声波”)来传递信息而控制拍摄的。
(2)如图乙所示是一群人正在利用自拍杆上的手机进行自拍,拿着自拍杆的人发现还有同事没有进入取景窗,请你给她一个合理的操作建议:____________。自拍时自拍杆的简图如图所示,O为支点,请你在图中画出力F2的力臂L2,并画出施加在A点的最小动力F1。(____________)
(3)如图甲中左图,小明把手机固定到自拍杆上,再高高跳起,按下手中的蓝牙遥控自拍器,自拍起跳后的自己(图丙)。他利用蓝牙自拍器设计了如图丁中A图所示的自动拍照装置,他将蓝牙遥控器带有按键的一端套上一个大小合适、另一端封闭的套管,并在套管内放置一个小球(可以在套管内滚动),想利用小球撞击蓝牙按键来自动遥控手机的拍摄。小明起跳时,应该选择图丁中图____(填“B”或“C”)的方式,用手竖直方向握住遥控器,就能自拍到人跳到最高处那个瞬间。为使该装置能准确的抓拍到人跳到最高处那
个瞬间,需要反复调整____________________(写出一条合理的建议)。
【答案】电磁波将自拍杆变的更长一些B套
管与蓝牙遥控器按键的距离
【解析】
【分析】
【详解】
(1)[1]蓝牙遥控自拍器是利用电磁波来传递信息而控制拍摄的。
(2)[2]照相时景物没有全部进入镜头的原因是景物到照相机镜头太近,此时应增大它们之间的距离,所以应将自拍杆变的更长一些。
[3]如图,过O点做力F2作用线的垂线,因为过A点的最大力臂就是过A点最小的力,而过A点最大力臂与作自拍杆的简图互相垂直,所以过A点作自拍杆的简图的垂线段,在线段的末端画上箭头就是力F1。
(3)[4]小明起跳时,应该选择图丁中图B的方式,用手竖直方向握住遥控器,人到达最高点时,小球由于惯性继续向上运动,撞击开关,C图起跳时小球在重力的作用下就撞击蓝牙
按键。
[5]为了使该装置能准确的抓拍到人跳到最高处那个瞬间,需要反复调整套管与蓝牙遥控器按键的距离。
13.小明同学测定斜面的机械效率,实验记录结果如下表:
(1)根据表格中数据,第四次(最陡)实验的有用功是_____J,总功是_____J。机械效率是_____;
(2)分析数据可知斜面越陡,机械效率_____(选填“越高”、“越低”或“不变”);
(3)分析实验数据还可知道,斜面的机械效率与物重_____(填“有关”或“无关”);
(4)第一次实验中,若拉力作用时间是5s,则拉力的功率是_____W。
【答案】1.5 2.4 62.5% 越高有关 0.3
【解析】
【分析】
(1)物体重力和高度的乘积计算有用功,拉力和绳子拉长的长度的乘积计算总功,有用功和总功的比值计算机械效率;
(2)根据实验数据判断机械效率的大小;
(3)当斜面上的重力改变时,机械效率改变,说明斜面的机械效率和物体重力有关;
(4)利用功和时间的比值计算功率。
【详解】
(1)[1]根据物体重力和高度计算有用功为:
W有=Gh=5N×0.3m=1.5J;
[2]拉力和绳子拉长的长度计算总功为:
W总=Fs=2.4N×1m=2.4J;
[3]机械效率为:
4
1.5J
100%=100%62.5%
2.4J
W
W
η=??=
有
总
;
(2)[4]根据测量的实验数据,斜面越陡,机械效率越大;
(3)[5]当物体重力增大时,斜面的机械效率变大,说明机械效率和物体重力有关;
(4)[6]利用功和时间计算功率为:
11 1.5J
==0.3W 5s
W P t =
总。
14.小华用一个弹簧测力计、一个圆柱体、两个底面积均为200cm 2的薄壁烧杯(分别装有一定量的酒精和水),对浸在液体中的物体所受的浮力进行探究,其中C 、D 分别是圆柱体刚好浸没在酒精和水中的情况.如图甲表示探究过程及有关数据.(酒精密度为0.8×103kg/m 3,g =l0N/kg )
(1)实验中使用弹簧测力计测量拉力前,应将测力计处于________方向将指针调至“0”刻度线上.
(2)比较图甲中A 、B 、C 的数据,可以得出浮力的大小与________有关. (3)如图甲中D 所示,圆柱体浸没在水中所受的浮力是________N.
(4)如图乙所示,完成实验后,小华将烧杯中水倒出,将该圆柱体放在烧杯底部,然后向烧杯倒入另一种液体,圆柱体受到的浮力F 浮与容器内液体的深度关系如图丙所示,圆柱体始终处于沉底状态,则该圆柱体的底面积为______m 2;未倒液体前圆柱体对容器底部的压强为_______Pa ,液体的密度为________kg/m 3.
(5)由图甲中A 到C 的过程中,圆柱体的重力做功是________J .
【答案】竖直 物体排开液体的体积 4 5×10-3 1.2×103 1.15×103 0.36 【解析】 【详解】
第一空.使用弹簧测力计测量拉力前,将测力计处于竖直方向,需要将指针调到零刻度线;
第二空.分析A 、B 、C 可知:液体均为酒精,探究过程中控制了液体的密度相同,物体排开液体的体积不同,弹簧测力计的示数不同,说明浮力和物体排开液体体积有关; 第三空.图A 中弹簧测力计的示数为6N ,物体的重力为6N ,图甲D 中,弹簧测力计的示数为2N ,圆柱体浸没在水中所受的浮力 F 浮=G -F =6N-2N=4N ;
第四空.根据阿基米德原理得到圆柱体的体积
V =V 排=33
4N
110kg/m 10N/kg
F g ρ=??浮水=4×10-4m 3, 由图丙可知,容器内水的深度为8cm 时,圆柱体受到的浮力为4.6N ,浮力不变,说明圆柱体全部浸入液体中,圆柱体的高度是8cm ,圆柱体排开液体的体积等于圆柱体的体积,圆柱体的底面积
S =43410m 0.08m
V h -?==5×10-3m 2; 第五空.未倒液体前圆柱体对容器底部的压强 p =
-32
6N
510m
F S =?压=1.2×103Pa ; 第六空.根据阿基米德原理得到液体的密度
ρ液=-434.6N 10N/kg 410m
F gV =??浮=1.15×103kg/m 3。 第七空.由图甲中A 到C 的过程中,圆柱体排开酒精的体积V 排酒=V =4×10-4m 3=400cm 3,圆柱体全部浸入酒精中,酒精上升的高度 Δh =
3
2
400cm =200cm V S 排酒精容
=2cm , 圆柱体下降的距离 h 1=h -Δh =8cm-2cm=6cm , 圆柱体的重力做功 W =Gh 1=6N×0.06m=0.36J 。
15.在探究“杠杆的平衡条件”的实验中:
(1)若实验前,杠杆静止在图甲所示位置,此时的杠杆是_____(平衡/不平衡)的. (2)如图甲,杠杆在支架上,要使其在水平位置平衡,可通过调节杠杆平衡螺母,使杠杆在水平位置平衡时,此时杠杆自重的力臂为_____cm .
(3)如图乙所示,杠杆在水平位置处于平衡状态,杠杆上每格均匀等距,每个钩码都相同.下列四项操作中,会使杠杆左端下倾的是_____.
①杠杆的两侧同时各减掉一个钩码; ②在两侧钩码下同时各加挂一个相同的钩码; ③将两侧的钩码同时各向外移动相同距离; ④将两侧的钩码同时各向内移动相同距离. A .①③B .②④C .②③D .①④
(4)如图丙,在右边用弹簧测力计竖直向下拉,使杠杆在水平位置平衡,这样做的好处是