汽车设计_转向系统
载重汽车转向系统结构设计
载重汽车转向系统结构设计学校:湘潭大学学院:兴湘学院专业:机械设计制造及其自动化姓名:张浩学号:2010963237指导老师:刘柏希老师摘要论文主要阐述了转向系统的设计。
汽车转向系统是汽车的重要组成部分,它直接影响汽车行驶的安全性,其质量严重影响汽车的操纵稳定性。
随着汽车工业的发展,汽车转向系统也在不断的得到改进,虽然电子转向系统已经开始使用,但是传统的机械转向系统依然起着主导作用。
转向系统由于其自身的特点被广泛运用于各类汽车之中。
本文重点设计了转向系统,并对转向系统零件强度、刚度进行了校核,同时还对转向系统计算载荷进行确定,同时对转向系统的其他主要零部件进行了结构设计,同样也对所设计的转向机构进行了分析和研究。
实现了转向系统结构简单紧凑,轴向尺寸短,且零件数目少的优点又能增加助力,从而实现了汽车转向的稳定性和灵敏性。
最后运用三维设计软件对所设计的结构进行了三维模型的建立,通过三维模型的设计与建立,更进一步的验证了所设计结构的合理性。
关键词:转向系统;转向系统;机械转向;转向;液压助力AbstractThis paple mainly tell about the design of circulation ball steering system. Redirector,an important component of the automobile,which is the key assembly decided the safety of the automobile. It seriously affected the quality of the vehicle handing and stability. Along with the development of the auto industry,automobile steering gear is continuously improved, although the electronic steering gear has began to use ,but the traditional mechanical steering gear is still p lays a leading role. Circulation ball type steering system has been widely used in various cars as of its characteristics.This paper designs the circulating ball type steering gear and steering parts strength and stiffness for the checking, but also to determine steering system computational load, at the same time to the other main parts of steering system structure design, also in the design of steering mechanism is analyzed and studied. Implements the redirector simple and compact structure, short axial dimensions, and the advantage of less parts number and can increase power, so as to realize the vehicle steering stability and sensitivity. Finally by using the 3 d design software to design 3 d model of structure, through the design and build 3 d model, further verify the rationality of the design structure.Key words: Steering gear; Steering system; Mechanical steering; Circulating ball type; The hydraulic power目录1 绪论 (1)1.1转向系统的使用背景 (1)1.2转向系统的研究意义 (1)1.3国内外研究现状 (2)1.4主要研究工作 (3)2 转向系统工作原理及其特点 (5)2.1转向系统概述 (5)2.2转向系统特点 (7)3 转向系统主要性能参数 (9)3.1转向系统的效率 (9)3.2传动比的变化特性 (11)3.3转向系统传动副的传动间隙△t (13)3.4转向系统计算载荷的确定 (13)4 转向系统的尺寸参数计算 (15)4.1主要尺寸参数的选择 (15)4.2变厚齿扇 (20)4.3转向系统零件强度计算 (25)4.4转向系统的润滑方转向和密封类型的选择 (27)5 转向传动机构设计 (28)5.1转向传动机构原理 (28)5.2转向梯形的布置 (29)5.3转向梯形机构尺寸的初步确定 (29)5.4梯形校核 (29)5.5转向传送机构的臂、杆与球销 (30)5.6转向横拉杆及其端部 (31)5.7杆件设计结果 (32)6 转向系统的其它部分 (33)6.1万向传动装置 (33)6.2传动轴与中间支承 (35)6.3动力转向机构设计 (35)6.4汽车转向系统的日常维护 (37)7 转向系统三维造型 (39)7.1 solidworks简介 (39)7.2转向系统的三维装配设计 (39)8 结论 (41)参考文献 (42)致谢 (43)毕业设计(论文)知识产权声明............................................ 错误!未定义书签。
越野车转向系统的设计

毕业设计题目:越野车转向系统设计与优化学生姓名:学号:专业:年级:指导老师:完成日期:目录第一章电动转向系统的来源及发展趋势 (1)第二章转向系统方案的分析 (3)1.工作原理的分析 (3)2. 转向系统机械部分工作条件 (3)3.转向系统关键部件的分析 (4)4.转向器的功用及类型 (5)5.转向系统的结构类型 (5)6.转向传动机构的功用和类型 (7)第三章转向系统的主要性能参数 (8)1. 转向系的效率 (8)2. 转向系统传动比的组成 (8)3. 转向系统的力传动比与角传动比的关系 (8)4. 传动系统传动比的计算 (9)5. 转向器的啮合特征 (10)6. 转向盘的自由行程 (11)第四章转向系统的设计与计算 (12)1. 转向轮侧偏角的计算(以下图为例) (12)2. 转向器参数的选取 (12)3. 动力转向机构的设计 (12)4. 转向梯形的计算和设计 (14)第五章结论 (16)谢辞 (17)参考文献 (18)附录 (19)转向系统设计与优化摘要汽车在行驶过程中,需要按照驾驶员的意志经常改变行驶方向,即所谓汽车转向。
用来改变或保持汽车行驶方向的机构称为汽车转向系统。
汽车转向系统的功能就是按照驾驶员的意愿控制汽车的行驶方向。
汽车转向系统对汽车的行驶安全是至关重要的。
因此需要对转向系统进行优化,从而使汽车操作起来更加方便、安全。
本次设计是EPS电动转向系统,即电动助力转向系统。
该系统是由一个机械系统和一个电控的电动马达结合在一起而形成的一个动力转向系统。
EPS系统主要是由扭矩传感器、电动机、电磁离合器、减速机构和电子控制单元等组成。
驾驶员在操纵方向盘进行转向时,转矩传感器检测到转向盘的转向以及转矩的大小,将电压信号输送到电子控制单元,电子控制单元根据转矩传感器检测到的转距电压信号、转动方向和车速信号等,向电动机控制器发出指令,使电动机输出相应大小和方向的转向助力转矩,从而产生辅助动力。
转向系统设计计算书
4结论说明∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙7
3.4转向器的内外轮转角:
根据整车设计要求和阿克曼几何原理,可得出理想的阿克曼转角曲线,具体计算如下:
ctg -ctg = 其中K——主销距L——轴距
ctg -ctg =0.55
根据我们设计的转向系统从整车装配数模中可取转向系统需要的设计硬点并建立Adams仿真计算模型,在不考虑轮胎侧偏和所有组件都为刚性的情况下可仿真出实际的内外轮转角曲线。
代入公式Rmin=6549mm即最小转弯半径的理论为6.5m。
3.2转向系的角传动比计算
齿轮齿条式转向系的角传动比i0ω=L/rcosθ
其中L——梯形臂长度;
r——主动小齿轮的节圆半径;
θ——齿轮与齿条的轴交角;
其中L=146.8光洋:r =6.351恒隆:r =6.75θ=20°,θ=25°(优化后)
静态原地转向阻力矩是汽车使用中最大极限转向所需力矩,汽车在沥青或者混凝土路面上的原地转向阻力矩采用下面的经验公式计算:
=
式中 ——轮胎与地面间的滑动摩擦系数,一般取0.8左右。
——转向阻力矩,单位N·mm;
——前轴负荷,单位N;
——轮胎气压,单位MPa。
根据整车参数,CC6460K/KY车满载前轴荷为1070㎏,约为10486N,轮胎气压为230KPa,梯形臂L1=147㎜,转向器梯形底角α=76°,动力受压面积S=9.18㎝2。
转向系统校核计算与设计指南
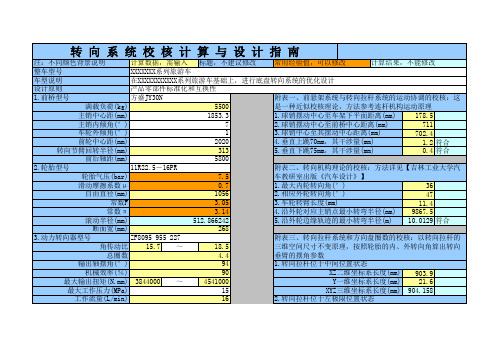
怠速(r/min)
600 ~
7.转向拉杆规格
φ42X8钢拔管
球头一总成型号 33R13-01066
球头一球销直径(mm)
球销沿其中心摆角(°)
球头二总成型号 3303E-059/060
球头二球销直径(mm)
球销沿其中心摆角(°)
8.方向盘半径(mm)
9.悬架型式
纽威ASB-140气簧
300
21 14 16 3600 500 1
转向系统校核计算与设计指南
注:不同颜色背景说明
计算数据,需输入 标题,不建议修改 常用经验值,可以修改
计算结果,不能修改
整车型号
XXXXXXX系列旅游车
车型说明
在XXXXXXXXXXX系列旅游车基础上,进行底盘转向系统的优化设计
设计原则
产品零部件标准化和互换性
1.前桥型号
方盛JY30N
附表一、前悬架系统与转向拉杆系统的运动协调的校核:这
268
3.动力转向器型号
ZF8095 955 227
附表三、转向拉杆系统和方向盘圈数的校核:以转向拉杆的
角传动比 15.7 ~
18.5
三维空间尺寸不变原理,按照轮胎的内、外转向角算出转向
总圈数
4.4
垂臂的摆角参数
输出轴摆角(°)
94
1.转向拉杆位于中间位置状态
机械效率(%)
90
XZ二维坐标系长度(mm) 903.9
转向节臂计算力臂(mm) 259.6
转向垂臂计算力臂(mm)
211
原地阻力矩换算到当量杆上的阻力(N) 12990.07
动力转向器输出到当量杆的拉力(N) 21233.17 符合
转向助力泵作用,方向盘的转动力(N) 31.09952
汽车电动助力转向系统设计
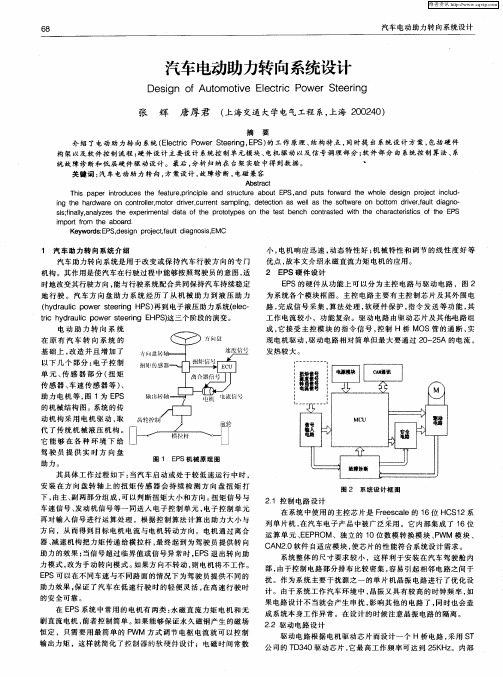
它 能 够 在 各 种 环 境 下 给 驾 驶 员 提 供 实 时 方 向 盘
助力。 图 1 E S机械原理图 P
其具体工作过程如下 : 当汽 车 启 动 或 处 于较 低 速 运 行 中时 , 安 装 在 方 向 盘 转 轴 上 的扭 矩 传 感 器 会 持 续 检 测 方 向 盘 扭 矩 打 下 , 主 、 两 部 分 组成 , 以 判 断 扭 矩 大 小 和 方 向 。 矩 信号 与 由 副 可 扭 车 速 信 号 、 动 机 信 号 等 一 同 送 人 电子 控 制 单 元 , 发 电子 控 制 单 元 再 对 输 入 信 号 进行 运算 处 理 ,根 据 控 制 算 法 计 算 出 助 力 大 小 与
维普资讯
6 8
汽 车 电动 助 力 转 向系 统 设计
汽车电动助力转向系统设计
De i f Au o t e Elc r o r S e r g sgn o t mo i e ti P we t e i v c n
张 辉 唐 厚 君
( 上海交通大学电气工程 系, 上海 20 4 ) 0 20
摘 要
介绍 了电动助力转 向 系统( l tc P we teig E S) Ee r o rSe r , P 的工作原理 、 构特 点 , ci n 结 同时提 出系统设计方 案 , 包括硬件
构 架 以及 软件 控 制 流程 : 件 设 计 主要 设计 系统 控 制 单元 模 块 、 机 驱 动 以 及 信 号 调 理 部 分 ; 件 部 分 由 系统 控 制 算 法 、 硬 电 软 系 统 故 障诊 断 和低 层 硬 件 驱 动 设 计 。 最后 , 分析 归 纳在 台 架 实验 中得 到 数 据 。 关键 词 : 车 电动 助 力 转 向 , 案 设 计 , 障诊 断 , 汽 方 故 电磁 兼 容
线控转向系统功能安全设计技术
线控转向系统功能安全设计技术一、引言线控转向系统是现代汽车中的重要组成部分,它通过电子信号控制转向器和转向泵,实现车辆的转向。
为了保证车辆的驾驶安全,线控转向系统需要进行功能安全设计。
本文将从以下几个方面介绍线控转向系统的功能安全设计技术。
二、功能安全概述1. 功能安全定义功能安全是指在特定的操作模式下,设备或系统能够在不出现危险失效的情况下执行其预期的安全功能。
2. 功能安全标准ISO 26262是汽车电子领域最为重要的功能安全标准。
该标准规定了汽车电子系统在各个开发阶段需要遵循的流程和方法,以确保其满足相应的安全性能要求。
三、线控转向系统功能安全设计技术1. 安全目标制定在线控转向系统设计过程中,需要根据ISO 26262标准制定相应的安全目标。
这些目标应该明确描述了所需实现的特定汽车操作模式下必须满足的限制条件和要求。
2. 危险分析与风险评估危险分析与风险评估是线控转向系统功能安全设计的重要环节。
通过对系统进行危险分析和风险评估,可以识别潜在的危险和安全问题,并制定相应的预防措施。
3. 安全性需求制定根据安全目标和危险分析结果,需要制定相应的安全性需求。
这些需求应该明确描述了系统需要满足的安全性能要求和限制条件。
4. 系统设计与验证在线控转向系统设计过程中,需要采用相应的技术手段来实现安全性能要求。
例如,采用双重或三重电路设计来保证转向信号的可靠性;采用故障检测和容错机制来保证系统在出现故障时能够及时发现并进行处理。
5. 系统测试与验证在线控转向系统开发完成后,需要进行相应的测试与验证。
这些测试应该覆盖所有可能出现的操作模式和故障情况,并确保系统能够满足安全性能要求。
6. 故障管理与诊断在线控转向系统运行过程中,可能会出现各种故障情况。
为了保证车辆驾驶安全,需要采用相应的故障管理与诊断技术,及时发现并处理故障。
四、结论线控转向系统是现代汽车中的重要组成部分,需要进行功能安全设计。
通过制定安全目标、进行危险分析与风险评估、制定安全性需求、系统设计与验证、系统测试与验证以及故障管理与诊断等技术手段,可以确保线控转向系统满足相应的安全性能要求,保证车辆驾驶安全。
汽车转向系统及前桥设计解析
目录摘要 (I)Abstract ................................................................................................................................ I I 0文献综述 . (1)0.1转向系统概况 (1)0.2前桥概况 (2)1引言 (4)2汽车主要参数的确定 (4)2.1轴距L (4)2.2前轮距和后轮距 (4)2.3整车整备质量 (5)2.4汽车的装载质量 (5)2.5质量系数 (5)2.6汽车满载总质量 (6)2.7轴荷分配 (6)2.8轮胎选择 (6)2.9最小转弯直径 (7)2.10数据的确定 (7)3转向系统设计 (8)3.1汽车转向基本特性 (8)3.2转向系统设计要求和主要性能参数 (8)3.2.1转向系统设计要求 (8)3.2.2转向系传动比 (9)3.2.3 转向器效率 (11)3.2.4转向系设计参数的确定 (12)3.3循环球式转向器设计 (12)3.3.1转向系计算载荷的确定 (12)3.3.2主要尺寸参数选择 (13)3.3.3螺杆、钢球、螺母传动副 (13)3.3.4齿条,齿扇传动副 (14)3.3.5循环球式转向器零件强度计算 (17)3.4整体式转向梯形机构设计 (18)3.4.1整体式转向梯形机构数学模型分析 (18)3.4.2 基于Matlab的整体式转向梯形机构优化设计 (21)4转向从动桥设计 (27)4.1转向从动桥主要零件参数确定 (27)4.2转向从动桥主要零件设计计算 (29)4.2.1制动工况下的前梁强度计算 (30)4.2.2在侧滑情况下的前梁强度计算 (31)4.2.3转向节在制动和侧滑工况下的强度计算 (33)4.2.4主销与转向节衬套在制动和侧滑工况下的强度计算 (34)4.2.5转向节推力轴承的计算 (36)5结论 (36)参考文献 (37)致谢 (38)汽车转向系统及前桥设计西南大学工程技术学院,重庆400716摘要:随着汽车的普及,对于汽车的各项性能指标和操纵感受也更加重视。
汽车转向系统设计计算匹配方式
1 汽车转背系统的功能之阳早格格创做1.1 驾驶者通过目标盘统制转背轮绕主销的转角而真止统制汽车疏通目标.对付目标盘的输进有二种办法:对付目标盘的角度输进战对付目标盘的力输进.拆有能源转背系统的汽车矮速止驶时,收配目标盘的力很沉,却要爆收很大的目标盘转角输进,汽车的疏通目标杂粹是由转背系统各杆件的几许关系所决定.那时,基础上是角输进.而正在下速止驶时,大概出现目标盘转角很小,汽车上仍效用有一定的侧背惯性力,那时,主假如通过力输进去把持汽车.1.2 将整车及轮胎的疏通、受力情景反馈给驾驶者.那种反馈,常常称为路感.驾驶者不妨通过脚—---感知目标盘的振动及运止情况、眼睛—---瞅察汽车疏通、身体—---启受到的惯性、耳朵—---听到轮胎正在大天滑动的声音去感觉、检测汽车的疏通状态,然而最要害的的疑息去自目标盘反馈给驾驶者的路感,果此良佳的路感是劣良的操稳性中不可缺少的部分.反馈分为力反馈战角反馈从转背系统的功能不妨得知:人、车通过转背系统组成了人车关环系统,是驾驶者对付汽车把持统制的一个关键系统.2转背系统安排的基础央供转背系是用去脆持大概者改变汽车止驶目标的机构,正在汽车转背止驶时,包管各转背轮之间有协做的转角关系.转背系的基础央供如下:2.1 汽车转直时,局部车轮应绕瞬时回转核心(瞬心)转化,所有车轮不该有侧滑.不谦脚那项央供会加剧轮胎磨益,并降矮汽车的收配宁静性.本量上,不哪一款汽车能真足谦脚那项央供,只可对付转背梯形杆系举止劣化,普遍正在时常使用转背角内(内轮15°~25°范畴)使转背内中轮疏通关系迫近上述央供.2.2 良佳的回正本能汽车转背动做完毕后,正在驾驶者紧启目标盘的条件下,转背轮能自动返回到直线止驶位子,并宁静止驶 .转背轮的回正力矩的大小主要由悬架系统所决断的前轮定位参数决定,普遍去道,效用汽车回正的果素有:轮胎侧偏偏个性、主销内倾角、主销后倾角、前轮中倾、转背节上下球节的摩揩益坏、转背节臂少、转背系统的顺效用等.2.3汽车正在所有止驶状态下,转背轮不得爆收自振,目标盘不晃动.2.4转背机构与悬架机构的疏通不协做所制成的疏通搞涉应尽大概小,由于疏通搞涉使转背轮爆收的晃动应最小.汽车转直止驶时,效用正在汽车量心处的离心力的效用,内轮载荷减小,中轮载荷减少,使悬架上的载荷爆收相映变更.若转背桥采与非独力悬架、钢板弹簧机构时,则内侧板簧果载荷减小而少度收缩,中侧板簧果载荷减少而少度减少,引导车轴正在火仄里内相对付车身转过一个角度,爆收轴转背效力.转背直推杆战纵推杆的疏通关系必须与之切合,使轴转背效力趋于缺累转背.当转背桥为独力悬架、螺旋弹簧机构时,内侧弹簧果载荷减小而少度减少,车轮相对付车身下跳,中侧弹簧果载荷减少而少度减小,车轮相对付车身上跳,果转背横推杆中球头从疏通教上去道,是转背轮的一部分,内球头属于车身的一部分,中球头随车轮上下跳动所产死的轨迹必须与内球头天圆核心面相切合.那便是保守转背表里中所道的断启面校核.本量上,新颖汽车安排中,合理利用那个疏通轨迹的搞涉,使得疏通搞涉制成的车轮偏偏转目标(侧倾转背)与转背目标好同,有帮于真止缺累转背.2.5良佳的机动性为了使汽车具备良佳的机动本能,必须使转背轮有尽大概大的转角,并要达到按前中轮轨迹估计,使其最小转直半径能达到汽车轴距的2~2.5倍.最小转蜿蜒径是汽车机动性的评介指标.效用最小转蜿蜒径的果素有:汽车轮距、轴距、轮胎侧偏偏刚刚度、灵验转背节臂少,转背器路程(齿轮齿条式转背器)、转背摇臂晃角(循环球式转背器)、转背摇臂少(循环球式转背器)、转背梯形的安插形式等.2.6 转背把持沉巧性转背把持沉巧性的评介指标常常有二项:驾驶者效用正在目标盘上的切背力大小战目标盘总圈数.板滞转背系统的轿车,止家驶中转背时的切背力应为50~100N.有帮力转背系统的轿车,此力为20~50N.K1哈弗为27N±3N.轿车目标盘总圈数不得大于4圈,货车不得大于6圈.M11板滞转背系统目标盘总圈数3.825,液压帮力转背系统目标盘总圈数3.083.对付于无帮力系统,目标盘上的切背力大小由转背系力传动比决断,目标盘总圈数等于转背器总圈数.目标盘总圈数多战切背力越多数简单使驾驶者疲倦.根据板滞本理,目标盘总圈数越多,切背力便越小,二者成反比.惟有合理对付目标盘总圈数战切背力与值,才搞有一个佳的转背把持沉巧性.对付于有帮力转背系统,不妨真止少的目标盘总圈数战小的目标盘切背力.然而需要注意帮力个性,虽然真止了佳的转背把持沉巧性,却简单出现转背下速收飘、转背收贼局里,益害把持宁静性. 2.7直线止驶宁静性转背系统战悬架系统稀切相关,必须使转背系统与悬架系统合理匹配,使汽车具备良佳的直线止驶宁静性,良佳路里不得出现的止驶跑偏偏.止驶跑偏偏与车辆的制制拆置有很大关系.当转背轮逢到一个小的障碍物时,车轮爆收偏偏转,那时汽车应具备赶快回到直线止驶位子的本领.循环球式转背器安排成变传动比,摇臂轴扇齿的中间齿(转背器的中位)齿薄比二边的大,与螺母齿条啮适时,转背器中间位子有相称于锁紧的功能.以达到保护直线止驶宁静的脚法.齿轮齿条式转背器将齿条中间时常使用几齿的齿间安排得比较小,与小齿轮啮适时,转背器中间位子有相称于锁紧的功能.以达到保护直线止驶宁静的脚法,共时也达到间隙补偿的脚法.2.8 转背轮逢到障碍物后,传播给目标盘的反冲力要尽大概小.转背轮逢到障碍物后,传播给目标盘的反冲力要尽大概小,可则会出现“挨脚”局里.预防“挨脚”局里的灵验步伐有:正在转背把持机构中减少挠性万背节,加拆转背阻僧器(减振器),普及转背系统顺效用等脚法.2.9 应当有汽车碰碰时对付驾驶者的防伤机构当爆收车福时,一圆里,车辆前端被压溃,使得转背管柱战转背轴进与背后移动(也便是背窜背驾驶者头胸部).另一圆里,驾驶者慢迫制动大概则被碰时汽车骤然停止,驾驶者正在强盛惯性力效用下,上半身冲背目标盘,伤害驾驶者.为预防那种妨害,便央供转背管柱正在轴背不克不迭是刚刚性的,正在转背管柱二个目标应具备溃缩战吸能功能,缓冲车身前部的冲打战驾驶者的冲打.顺便提一下,系仄安戴利害常灵验的一个步伐. 2.10 转背轮与目标盘偏偏转目标普遍转背系统必须搞疏通分解,最起码要包管的是:汽车正在前进时,往左转化目标盘时,汽车应背左转,左挨左转.2.11相宜的缺累转背度(相识)汽车等速止驶时,赶快给目标盘一个角度输进,使转背轮赶快爆收偏偏转,汽车加进一个稳态赞同---等速圆周止驶.那时,汽车爆收一个绕Z轴线的横晃角速度,横晃角速度与转背轮转角的(大概者目标盘的转角)的比值称为转背敏捷度.横晃角速度删益---横晃加速度与车速成线性关系时,即它们函数关系为背去线,斜率为定值,称汽车具备中性转背个性.表示为:脆持相共的目标盘转角,普及车速,汽车的转直半径保护正在一个恒定值.横晃加速度与车速成非线性关系,其斜率呈减小趋势,称汽车具备缺累转背个性.表示为:脆持相共的目标盘转角,普及车速,汽车的转直半径越去越大.横晃加速度与车速成非线性关系,其斜率呈减少趋势,当车速度超出临界车速时,横晃角速度趋于无贫大,称汽车具备过多转背个性.表示为:脆持相共的目标盘转角,普及车速,汽车的转直半径越去越小.中性转背很简单转移为过多转背,过多转背汽车达到临界车速时将得去宁静性,由于其转直半径越去越小,横晃加速度越去越大,汽车将爆收激转而侧滑摔尾大概者翻车,果此汽车皆应具备相宜的缺累转背个性.转背敏捷度战转背个性主要效用果素:悬挂系统、转背系统以及整车的量心位子、轴距、轮距等参数.3 转背轮定位参数主销的观念:转背节绕车身(大概车架)转化的轴线.对付于大普遍货车客车的非独力悬挂,其主销是转背节与转背桥拳部对接的真真正在正在的主销.对付于独力悬挂的轿车,单晃臂结构的主销是下晃臂中球心与上晃臂球心的连线.麦弗逊悬挂的主销是下晃臂中球心与前滑柱与车身铰接面的连线.3.1 主销后倾角当汽车火仄停搁时,正在汽车的纵背垂里内,主销上部背后倾斜一个角度r,称为主销后倾角.当主销具备后倾角时,主销轴线与路里接面A 将位于车轮与路里交战面的前里.当汽车直线止驶时,若转背轮奇然受到中力效用而稍有偏偏转(比目标左偏偏转,如图中箭头所示),能爆收回正效用.也便是道,果为主销后倾角,汽车具备了保护直线止驶的本领.轮胎接天面B背主销做垂线,B面与垂脚面的距离L是车轮爆收回正力矩的力臂,果主销后倾角普遍不大,如K1为3°±30’°±30’,正在三维模拟技能尚不老练的保守安排表里中,便于估计,普遍以主销脱天面A与B面距离动做评介回正力矩的主参数.那个距离喊搞后倾拖距ξ.回正力矩M=ξ* F y附加转角δ= F y/C sF y----汽车受到的侧背力,与汽车品量、侧背加速度成正比.C s----转背系统刚刚度,包罗转背节、转背器、转背管柱的刚刚度.回正力矩M,附加转角δ便是转背系统的力反馈战角反馈.ξ越大回正力矩越大,共时,车辆转背时,那个力矩便成了转背需要克服的阻力矩,转背也变得艰易.回正力矩与后倾拖距ξ战车速v的仄圆皆成正比率关系.汽车中下速的回正力矩主要去自于后倾拖距ξ.3.2 主销内倾角当汽车火仄停搁时,正在汽车的横背垂里内,主销轴线与大天垂线的夹角为主销内倾角.主销内倾角的效用是使车轮自动回正.常常车轮轴线不正在火仄里,为了便当证明,那里假设直线止驶时车轮轴线正在火仄里上.对付于车轮轴线不正在火仄里的情况,只消把下图的火仄里改为锥里.如下图所示,思量该火仄里上战主销有接面的直线,主销与那些直线的夹角有一个最大值.而汽车直线止驶时,车轮轴线与主销的接角恰为那个最大值.车轮轴线与主销夹角正在转背历程中是稳定的,当车轮转过一个角度,车轮轴线便离启火仄里往下倾斜,以致车身上抬,势能减少.那样汽车自己的沉力便有使转背轮恢复到本去中间位子的效验.由于主销内倾,前轮转背时将使车身有抬下的倾背,那种系统位能的普及爆收回正力矩M'.假设Q为轮荷,δ为前轮转角,犹如下关系:M'=(Q*C*sin(2β)*sinδ)/2不妨瞅出,M'与侧背力F y无关,有:M比M'正在下速时大得多,矮速时,M'比M大得多.所以道:汽车矮速时回正主要由主销内倾角决断.共样主销内倾角β越大,转背越艰易.3.3 车轮中倾角当汽车火仄停搁时,正在汽车的横背垂里内,车轮仄里与大天垂线的夹角为前轮中倾角.如果空车时车轮的拆置正佳笔直于路里,则谦载时车桥果拆载变形而大概出现车轮内倾,那样将加速车轮胎的磨益.其余,路里对付车轮的笔直反力沿轮毂的轴背分力将使轮毂压背中端的小轴启,加沉了中端小轴启及轮毂紧固螺母的背荷,降矮它们的寿命.果此,为了前轮有一其中倾角.然而是中倾角也不宜过大,可则也会使轮胎爆收偏偏磨益.新颖汽车安排中也有将车轮中倾角α与为背值,比圆M11的车轮中倾角α为-1°±30’,其脚法是使转背轮正在转背时,车轮上下跳动引起的车轮偏偏转目标与车身正在离心力效用下的偏偏转目标普遍,普及收配宁静性.3.4 车轮前束车轮有了中倾角后,正在滑动时便类似于滚锥,进而引导二侧车轮背中滚启.由于转背横推杆战车桥的拘束车轮不致背中滚启,车轮将正在大天上出现边滚边背内滑的局里,进而减少了轮胎的磨益.为了预防那种由于圆锥滑动效力戴去的不良成果,将二前轮适合背内偏偏转,即产死前轮前束.前束的度量办法有二种:正在火仄里内,安排车轮中间仄里正在前后二侧的间距好,既A-R,如M11为0~2mm.另一种是车轮核心仄里与纵背仄里的夹角.启动轮的前束产死推力线,推力线必须与车辆纵背对付称仄里沉合,可则出现止驶跑偏偏.4 板滞转背系统结构底下是板滞转背系统主要部件介绍4.1 板滞转背器—转背真止机构4.1.1齿轮齿条式转背器齿轮齿条式转背器有四种形式:正里输进,二端输出.那是普遍采与的形式.M11也是那种.中间输进二端输出,其最大的佳处是:一个汽车共时启垦安排舵时,转背器不妨共用,不必沉新启垦.其缺面是:思量共用,齿轮轴战齿条轴线必须笔直,齿轮战齿条的螺旋角不克不迭与的较大.那样,齿轮齿条沉叠系数矮,拆载本领也矮,齿轮齿条仄顺性也好.正里输进,中间输出,那样转背横推杆不妨搞得较少,主假如谦脚与悬挂匹配战安插的需要.正里输进,一端输出.很少采与.少安奥托采与那种结构齿轮齿条式转背器的基础参数:正在整车坐标系下,内中球头核心坐标、输进轴与齿条沿压块核心线的投影面、输进轴与齿条夹角(即拆置角),那需要正在整车安插阶段决定.特天是内中球头核心必须与悬挂所决断的转背节的疏通轨迹充分协做.转背器基赋本能参数:力个性、线角传动比、齿条路程、输进轴总圈数(普遍去道便是目标盘总圈数)、转背器顺效用、转背器正效用、齿轮齿条啮合间隙个性、静扭刚刚度.线角传动比i=m n*z*π/cosαi 输进轴转化一圈,齿条的路程m n齿轮、齿条法里模数z小齿轮齿数α齿条倾角必须的真验:力个性真验、正启动疲倦真验、顺启动疲倦真验、冲打强度真验、静扭益害真验、耐腐蚀性真验.齿轮齿条式转背器的便宜:A 结构紧稀简朴,沉量沉,安插简单,不需要象循环球式转背器所必须的转背摇臂、直推杆、纵推杆;B 传动效用下,可达90%以上;C 有自动补偿间隙拆置,还不妨改变转背系统刚刚度,预防处事时爆收的冲打战噪音;D 果其顺效用下,对付车轮的回正力矩传播到目标盘的阻滞力小,转背系统简单回正.齿轮齿条式转背器的缺面:A 果其顺效用下,易出现挨脚局里;B 果齿轮齿条模数普遍与的较矮,拆载本领矮,普遍只可用于轿车战小型客车.4.1.2其余典型转背器介绍4.1.2.1 循环球式转背器循环球式转背器循环球式转背器是暂时海内中应用最广大的结构型式之一,普遍有二级传动副,第一级是螺杆螺母传动副,第二级是齿条齿扇传动副.为了缩小转背螺杆转背螺母之间的摩揩,二者的螺纹本去不间接交战,其间拆有多个钢球,以真止滑动摩揩.转背螺杆战螺母上皆加工出断里表面为二段大概三段分歧心圆弧组成的近似半圆的螺旋槽.二者的螺旋槽能协共产死近似圆形断里的螺旋管状通讲.螺母正里有二对付通孔,可将钢球今后孔塞进螺旋形通讲内.转背螺母中有二根钢球导管,每根导管的二端分别拔出螺母正里的一对付通孔中.导管内也拆谦了钢球.那样,二根导管战螺母内的螺旋管状通讲推拢成二条各自独力的启关的钢球"流讲".转背螺杆转化时,通过钢球将力传给转背螺母,螺母即沿轴背移动.共时,正在螺杆及螺母与钢球间的摩揩力奇效用下,所有钢球便正在螺旋管状通讲内滑动,产死"球流".正在转背器处事时,二列钢球不过正在各自的启关流讲内循环,不会脱出.循环球式转背器的便宜:A 由于正在螺杆螺母间有不妨循环的钢球,将滑动摩揩形成滑动摩揩,果而传动效用下,可达85%以上;B 不妨包管脚够的耐磨本能,果而有脚够的使用寿命;C 间隙安排简单(很易真止自动安排),处事稳固稳当;D 很简单真止变传动比功能.循环球式转背器的缺面:A顺效用下,易出现挨脚局里;B 结构搀杂,制制粗度央供下;C 安插艰易,普遍用于安插空间大的货车战客车(也果为其拆载本领下).4.1.2.2 蜗杆直柄指销式转背器蜗杆直柄指销式转背器蜗杆直柄指销式转背器的传动副(以转背蜗杆为主动件,其从动件是拆正在摇臂轴直柄端部的指销.转背蜗杆转化时,与之啮合的指销即绕摇臂轴轴线沿圆弧疏通,并戴动摇臂轴转化.蜗杆直柄指销式转背器的便宜:A 简单真止变传动比;B 间隙安排简单,制制较循环球简朴.缺面太多:销子不克不迭自转,磨益快;正顺效用皆矮等待,基础已经淘汰.4.2 转背管柱及万背节、目标盘—转背把持机构4.2.2转背管柱及万背节M11转背管柱结构转背管柱及万背节的基础功能:1 将驾驶者给目标盘的操舵力矩战角度位移传播给转背器;2 传播转背器赢得的路里以及汽车止驶的情景等疑息;3 驾驶者免伤害功能.对付下档轿车还应具备的恬静性功能:目标盘角度可调;目标盘下度可调等,对付拆有阻僧器(如挠性万背节)还具备衰减路里冲打的效用.其余还应具备:推拢启关拆置、面火启关、化妆罩等拆置性的收援功能.安排央供:除需谦脚上述功能央供中,还应谦脚如下央供:根据板滞本理可知,单十字轴万背节的等速二个需要条件为:三相接轴轴线正在共一仄里内战二轴间夹角的千万于值相等.然而由于整车安插去由,基础不克不迭谦脚等速条件,且目标盘的转化速度很矮,对付等速要不下.然而也央供二轴间空间夹角α、β不得大于35°,最佳矮于30°,可则十字轴轴启工况顺转,寿命降矮,且转背系统效用降矮,回正本能好.转背管柱及万背节的基础真验:驱能源矩真验、火仄固态刚刚度、笔直固态刚刚度、扭转耐暂考查、扭转耐暂强度、转背柱抗扭强度、目标锁套抗扭力矩、轴启推着力、滚针轴启的拔着力、滑动阻力、静扭强度、耐腐蚀性真验. 4.2.2 目标盘目标盘普遍为二辐条、三辐条大概四辐条形状.目标盘属于中瞅件,对付其制型战表面品量有较下央供.其结构是采与内骨架,中包PV收泡资料,也有再中包真皮.骨架由焊接钢管大概者镁合金制制,出于碰碰央供,骨架应具备背下蜿蜒变形的本领,以达到吸能的脚法.对付于目标盘的台架真验有多项央供,如:身体碰打考查、静扭强度考查、骨架总成扭转蜿蜒考查、耐汗真验等.5 能源转背系统结构能源转背系统兼用驾驶员体力战收效果的能源为转背能源的转背系统,它是正在板滞转背系统的前提上加设一套转背加力拆置而产死的.其中属于转背加力拆置的部件是:转背油泵、转背油管、转背油罐以及位于真足式转背器里里的转背统制阀及转背能源缸等.当驾驶员转化转背盘时,转背横推杆推(推)动转背节,使转背轮偏偏转,进而改变汽车的止驶目标.5.1 对付能源转背机构的央供1)疏通教上应脆持转背轮转角战驾驶员转化转背盘的转角之间脆持一定的比率关系.2)随着转背轮阻力的删大(大概减小),效用正在转背盘上的脚力必须删大(大概减小),称之为“路感”.3)当效用正在转背盘上的切背力Fh≥0.025-0.190kN 时(果汽车形式分歧而同),能源转背器便应启初处事.4)转背后,转背盘应自动回正,并使汽车脆持正在宁静的直线止驶状态.5)处事敏捷,即转背盘转化后,系统内压力能很快删少到最大值.6)能源转背得灵时,仍能用板滞系统收配车轮转背. 7)稀启本能佳,内、中揭收少.5.2能源转背器能源转背器是正在板滞转背器减少了转背统制阀战能源油缸组成,底下主要介绍统制阀战能源油缸的工做本理.5.2.1处事本理汽车直线止驶时,阀芯与阀套的位子关系如图中所示.自泵去的液压油经阀芯与阀套间的间隙,流背能源缸二端,能源缸二端油压相等.驾驶员转化目标盘时,阀芯与阀套的相对付位子爆收改变,使得大部分大概局部去自泵的液压油流进能源缸某一端,而另一端与回油管路接通,能源缸促进汽车左传大概左转.5.2.2能源转背器的力个性能源转背器的统制阀(以转阀为例)本量上是一个液压伺服阀,使用流体力教中的薄壁小孔本理,正在活塞缸的二端修坐压力好,那个压力好遵循伯努利圆程,根据阀芯阀套的过流里积战系统流量举止估计.施加正在输进轴(目标盘)上的力矩的变更引起阀芯阀套的过流里积的变更,过流里积的变更决断压力好的大小,以真止分歧转背状态下的力输出.那个压力好与输进轴的输进力矩的关系便是转背器的力个性.下图是M11转背器力个性直线.A区,是直线止驶位子附近小角度转背区,称为不敏捷区.不敏捷区不克不迭博得过宽,可则会出现操舵力偏偏大.如果过窄,汽车下速止驶时,沉微一动目标盘,转背器赶快帮力,易出现“收飘”,止驶得去宁静性,另一圆里,转背动做中断后,车轮回正力矩启动阀芯,弹性元件(扭杆)的变形不克不迭克服转背管柱战目标盘的转化惯量,将挨启统制阀,爆收压力,仄稳回正力矩,汽车将不克不迭回正.C区时常使用赶快转背止驶区,称为修压区.央供帮力效用明隐,油压直线的斜率减少教大,直线由仄缓变陡.。
转向系统设计规范
转向系统设计规范目录:一、概述二、设计输入1.市场分析报告2.产品概念报告3.技术方案分析报告4.产品信函5.项目描述书三、转向系统设计目标1.承载性目标2.操纵稳定性目标3.安全性目标4.成本目标5.总成重量目标四、转向系统结构参数的确定1、转向系统结构形式(主要部件构成明细)2、安装尺寸的确定3、车架结构与转向元件的物理接口4、前桥总成与转向元件的物理接口5、车身元件与转向元件的物理接口6、其他五、转向系统匹配1、转向轻便性2、助力转向系统流量等匹配六、机械转向设计1.转向器设计2.转向传动轴设计七、动力转向设计1、转向器设计2、转向油泵设计3、转向油罐设计4、其他部件设计八、转向系统验证与试验项目1、动力学模型分析与验证2、整车性能试验项目与可靠性试验项目3、转向器台架试验项目4、转向油泵台架试验项目5、转向油罐台架试验项目7、转向油管台架试验项目8、转向盘台架试验项目9、转向传动轴台架试验项目10、其他附件:转向系统相关标准与设计参考书1、操纵稳定性2、转向器3、转向油罐4、转向油泵5、转向油管6、转向传动轴7、转向盘一、概述本文适用于传统结构的转向系统,主要针对转向器、转向油泵等主要部件设计参数的选取、计算、验证等作出较详细的工作模板。
1、转向系统设计对整车性能的影响转向系统的功能是保证汽车能按驾驶员的意志进行转向行驶。
同时对操纵稳定性有一定的影响。
转向系统按能源的不同分为机械转向系和动力转向系两大类。
机械转向系以驾驶员的体力作为转向能源,其中所有传力件为机械的。
机械转向器由转向操纵机构、转向器和转向传动机构组成。
动力转向系是在机械转向系的基础上加设一套转向加力装置而行成的。
2、转向设计流程概述设计输入→整车设计目标→物理边界确定→主要部件性能指标确定→结构设计→3、转向系统的评价指标3.1汽车操纵稳定性:3.2人机工程学3.3.1 GB7258-2004《机动车运行安全技术条件》:3.3.1.1机动车方向盘的最大自由转动量不允许大于:1)最高设计车速不小于100km/h的机动车:20°2)其他机动车:30°(三轮车除外)3.3.1.2机动车在平坦、硬实、干燥和清洁的水泥或沥青路面上行驶,以10km/h的速度在5S内沿螺旋线从直线行驶过渡到直径24m的圆周行驶,施加于方向盘外缘的最大切向力不应大于245N。
汽车电控液压动力转向系统的设计
摘要电控液压动力转向系统可解决汽车转向轻便性和灵敏性的矛盾,使驾驶员在汽车低速行驶时获得较大助力,高速行驶时获得较强的路感。
本次设计主要完成电控液压动力转向系统的液压部分和机械部分的设计。
在设计中将车速信号和转向盘角速度信号引入液压转向系统,电子控制单元根据车速传感器和转向盘转角传感器检测的车速信号和转向信号,计算出电动机的对应的转速,对电动机转速进行控制,电动机驱动油泵,控制电动机转速从而控制油泵的泵油量,改变助力的大小。
文中一开始阐述了电控液压动力转向系统设计的目的和意义、发展状况以及应用前景。
接着分析论述了总体设计方案,进行了液压动力系统、机械转向器等主要部件的方案分析和选择。
关键词:动力转向;液压动力转向;助力转向;可变助力特性;电控液压动力转向;ABSTRACTElectronically controlled hydraulic power steering system(EPHS) to solve the car and light sensitivity of the contradictions so that the driver in the car at low speed on a larger power, high-speed movements were strong sense of direction.The main design completed electronically controlled hydraulic power steering system of hydraulic and mechanical parts of the designation.In this designation, speed signals and Zhuanxiang Pan angular velocity signal are introduced to the hydraulic steering system. According to the detected speed signal and the corner signal of Zhuanxiang Pan,electronic control units detect speed signals and the corner signal of Zhuanxiang Pan by the speed sensor type of assistance, and then calculate the corresponding rotational of motor,and control the rotational speed of motor,then control the oil flow of pump,in order to meet t herequi rem ents t o li ght t he requirem ent s of handli ng and st abil i t y .When expounded the start of a hydraulic power steering electronic control system design the purpose and significance of the development situation and prospects. And then analysis and choice its hydraulic power systems, mechanical steering gear and other major components of the programme.Keyword: Power Steering;Hydraulic Power Steering; Auxiliary Force; VariablePower Characteristics; Electronically Controlled Hydraulic Power steering目录摘要 (I)ABSTRACT (II)第1章绪论 (1)1.1研究本课题的目的和意义 (1)1.2汽车转向技术现状与发展趋势 (1)1.2.1机械转向系统 (1)1.2.2液压动力转向系统 (2)1.2.3电控液压动力转向系统 (2)1.2.4电动助力转向系统 (2)1.2.5线控转向系统 (3)1.3汽车电控液压动力转向系统组成、 (3)1.4汽车电子控制转向技术的发展概况与前景 (4)1.4.1电子控制动力转向系统的发展概况 (4)1.4.2电子控制动力转向系统的发展趋势 (6)1.5本次设计的主要内容 (7)第2章动力转向系统的设计方案分析 (8)2.1动力转向系统 (8)2.2液压动力转向系统 (8)2.3电控动力转向系统 (11)2.3.1液压式电子控制动力转向系统 (11)2.3.2电动式电子控制动力转向系统 (11)2.4动力转向系统设计方案分析 (12)2.5本章小结 (13)第3章液压动力系统的设计 (14)3.1动力缸的类型及安装方式 (14)3.2动力缸的主要零件的结构和材料 (14)3.3动力缸的密封装置 (15)3.4动力缸的缓冲装置 (15)3.5动力缸的设计计算 (15)3.5.1动力缸的主要几何尺寸的计算和选型 (15)3.5.2动力缸的结构参数的计算选型 (17)3.5.3动力缸的性能参数的计算 (19)3.5.4动力缸油口直径d 的计算 (19)3.5.5缸底厚度h的计算 (20)3.5.6活塞杆直径的强度校核 (20)3.6油泵的计算与选型 (21)p的计算 (21)3.6.1油泵的最高供油压力pq的计算 (21)3.6.2油泵最大供油量p3.6.3油泵的选型 (22)3.6.4与油泵匹配的电动机的计算选择 (22)3.7油箱与油管的计算与选型 (22)3.7.1油箱容积V的计算 (22)3.7.2油管内径d的计算 (23)3.8换向阀的选型 (23)3.8.1换向阀 (23)3.8.2滑阀式换向阀 (24)3.8.3换向机能 (25)3.8.4滑阀机能 (25)3.8.5直流电磁铁和交流电磁铁 (27)3.8.6干式、油浸式、湿式电磁铁 (27)3.9电控动力转向系统所用传感器的选择 (28)3.9.1车速传感器 (24)3.9.2转角传感器 (24)3.10本章小结 (25)第4章机械转向器方案分析与设计计算 (26)4.1机械转向器方案分析 (26)4.1.1齿轮齿条式转向器 (26)4.1.2循环球式转向器 (29)4.1.3蜗杆滚轮式转向器 (30)4.1.4蜗杆指销式转向器 (30)4.1.5机械转向器的确定 (34)4.2齿轮齿条式转向器设计与计算 (30)4.2.1选择齿轮齿条材料及精度等级 (31)4.2.2主要尺寸计算 (32)4.2.3齿轮强度校核 (33)4.2.4齿条的设计计算 (35)4.3本章小结 (35)第5章电控动力转向系统的变助力方法分析 (36)5.1液压式电子控制动力转向系统 (36)5.1.1流量控制式EPS (36)5.1.2反力控制式EPS (37)5.1.3 阀灵敏度控制式EPS (37)5.2电动式电子控制动力转向系统 (37)5.3本章小结 (37)结论 (39)参考文献 (40)致谢 (41)第1章绪论1.1研究本课题的目的和意义汽车转向系统是用来改变汽车行驶方向的专设机构的总称。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
. 精选范本 第一节 概 述
转向系是用来保持或者改变汽车行驶方向的机构,在汽车转向行驶时,保证各转向轮之间有协调的转角关系。 机械转向系依靠驾驶员的手力转动转向盘,经转向器和转向传动机构使转向轮偏转。有些汽车还装有防伤机构和转向减振器。采用动力转向的汽车还装有动力系统,并借助此系统来减轻驾驶员的手力。 对转向系提出的要求有: 1)汽车转弯行驶时,全部车轮应绕瞬时转向中心旋转,任何车轮不应有侧滑。不满足这项要求会加速轮胎磨损,并降低汽车的行驶稳定性。 2)汽车转向行驶后,在驾驶员松开转向盘的条件下,转向轮能自动返回到直线行驶位置,并稳定行驶。 3)汽车在任何行驶状态下,转向轮不得产生自振,转向盘没有摆动。 4)转向传动机构和悬架导向装置共同工作时,由于运动不协调使车轮产生的摆动应最小。 5)保证汽车有较高的机动性,具有迅速和小转弯行驶能力。 6)操纵轻便。 7)转向轮碰撞到障碍物以后,传给转向盘的反冲力要尽可能小。 8)转向器和转向传动机构的球头处,有消除因磨损而产生间隙的调整机构。 9)在车祸中,当转向轴和转向盘由于车架或车身变形而共同后移时,转向系应有能使驾驶员免遭或减轻伤害的防伤装置。 10)进行运动校核,保证转向盘与转向轮转动方向一致。 正确设计转向梯形机构,可以使第一项要求得到保证。转向系中设置有转向减振器时,能够防止转向轮产生自振,同时又能使传到转向盘上的反冲力明显降低。为了使汽车具有良好的机动性能,必须使转向轮有尽可能大的转角,并要达到按前外轮车轮轨迹计算,其最小转弯半径能达到汽车轴距的2~2.5倍。通常用转向时驾驶员作用·在转向盘上的切向力大小和转向盘转动圈数多少两项指标来评价操纵轻便性。没有装置动力转向的轿车,在行驶中转向,此力应为50—100N;有动力转向时,此力在20—50N。当货车从直线行驶状态,以10km/h速度在柏油或水泥的水平路段上转入沿半径为12m的圆周行驶,且路面干燥,若转向系内没有装动力转向器,上述切向力不得超过250N;有动力转向器时,不得超过120N。轿车. 精选范本 转向盘从中间位置转到每一端的圈数不得超过2.0圈,货车则要求不超过3.0圈。· 近年来,电动、电控动力转向器已得到较快发展,不久的将来可以转入商品装车使用。电控动力转向可以实现在各种行驶条件下转动转向盘的力都轻便。
第二节 转向系主要性能参数 一、转向器的效率 功率P1从转向轴输入,经转向摇臂轴输出所求得的效率称为正效率,用符号 η+表示,η+=(P1—P2)/Pl;反之称为逆效率,用符号η-表示,η- =(P3—P2)/P3。式中,P2为转向器中的摩擦功率;P3为作用在转向摇臂轴上的功率。为了保证转向时驾驶员转动转向盘轻便,要求正效率高。为了保证汽车转向后转向轮和转向盘能自动返回到直线行驶位置,又需要有一定的逆效率。为了减轻在不平路面上行驶时驾驶员的疲劳,车轮与路面之间的作用力传至转向盘上要尽可能小,防止打手又要求此逆效率尽可能低。 1.转向器的正效率η+ 影响转向器正效率的因素有:转向器的类型、结构特点、结构参数和制造质量等。 (1)转向器类型、结构特点与效率 在前述四种转向器中,齿轮齿条式、循环球式转向器的正效率比较高,而蜗杆指销式特别是固定销和蜗杆滚轮式转向器的正效率要明显的低些。 同一类型转向器,因结构不同效率也不一样。如蜗杆滚轮式转向器的滚轮与支持轴之间的轴承可以选用滚针轴承、圆锥滚子轴承和球轴承等三种结构之一。第一种结构除滚轮与滚针之间有摩擦损失外,滚轮侧翼与垫片之间还存在滑动摩擦损失,故这种转向器的效率ly+仅有54%。另外两种结构的转向器效率,根据试验结果分别为70%和75%。 转向摇臂轴轴承的形式对效率也有影响,用滚针轴承比用滑动轴承可使正或逆效率提高约10%。 (2)转向器的结构参数与效率 如果忽略轴承和其它地方的摩擦损失,只考虑啮合副的摩擦损失,对于蜗杆和螺杆类转向器,其效率可用下式计算
)tan(tan00 (7--1)
式中,αo为蜗杆(或螺杆)的螺线导程角;ρ为摩擦角,ρ=arctanf;f为摩擦因数。 2.转向器逆效率η-
根据逆效率大小不同,转向器又有可逆式、极限可逆式和不可逆式之分。 . 精选范本 路面作用在车轮上的力,经过转向系可大部分传递到转向盘,这种逆效率较高的转向器属于可逆式。它能保证转向后,转向轮和转向盘自动回正。这既减轻了驾驶员的疲劳,又提高了行驶安全性。但是,在不平路面上行驶时,车轮受到的冲击力,能大部分传至转向盘,造成驾驶员“打手”,使之精神状态紧张,如果长时间在不平路面上行驶,易使驾驶员疲劳,影响安全驾驶。属于可逆式的转向器有齿轮齿条式和循环球式转向器。 不可逆式转向器,是指车轮受到的冲击力不能传到转向盘的转向器。该冲击力由转向传动机构的零件承受,因而这些零件容易损坏。同时,它既不能保证车轮自动回正,驾驶员又缺乏路面感觉;因此,现代汽车不采用这种转向器。 极限可逆式转向器介于上述两者之间。在车轮受到冲击力作用时,此力只有较小一部分传至转向盘。它的逆效率较低,在不平路面上行驶时,驾驶员并不十分紧张,同时转向传动机构的零件所承受的冲击力也比不可逆式转向器要小。 如果忽略轴承和其它地方的摩擦损失,只考虑啮合副的摩擦损失,则逆效率可用下式计算
00tan
tan)( (7—2)
式(7—1)和式(7—2)表明:增加导程角αo,正、逆效率均增大。受η-增大的影响,αo不宜取得过大。当导程角小于或等于摩擦角时,逆效率为负值或者为零,此时表明该转向器是不可逆式转向器。为此,导程角必须大于摩擦角。通常螺线导程角选在8°~10°之间。 二、传动比的变化特性 1.转向系传动比 转向系的传动比包括转向系的角传动比woi
和转向系的力传动比pi
从轮胎接地面中心作用在两个转向轮上的合力2Fw与作用在转向盘上的手力Fh之比,称为力传动比,即 ip=2Fw/Fh 。 转向盘转动角速度 ωw 与同侧转向节偏转角速度 ωk 之比,称为转向系角传动比woi
,即;
kkkwwodddtd
dtdi式中,dφ 为转向盘转角增量;dβk 为转向节转角增量;dt为时
间增量。它又由转向器角传动比iw 和转向传动机构角传动比iw′ 所组成,即 iwo=iw iw′ 。 转向盘角速度ωw与摇臂轴转动角速度ωK之比,称为转向器角传动比iw′, 即. 精选范本 pppwwdddtd
dtdi。
式中,dβp为摇臂轴转角增量。此定义适用于除齿轮齿条式之外的转向器。 摇臂轴转动角速度ωp与同侧转向节偏转角速度ωk之比,称为转向传动机构的角传动比
iw′,即kkkpkp
wdddtd
dtdi’。
2.力传动比与转向系角传动比的关系 轮胎与地面之间的转向阻力Fw和作用在转向节上的转向阻力矩 Mr 之间有如下关系
aMFrW (7—3)
式中,α为主销偏移距,指从转向节主销轴线的延长线与支承平面的交点至车轮中心平面与支承平面交线间的距离。 作用在转向盘上的手力Fh可用下式表示
SWhhD
MF2 (7—4)
式中,Mh为作用在转向盘上的力矩;Dsw为转向盘直径。 将式(7—3)、式(7—4)代入 ip=2Fw/Fh 后得到
aMDMihswrP (7—5)
分析式(7—5)可知,当主销偏移距a小时,力传动比 ip 应取大些才能保证转向轻便。通常轿车的 a 值在0.4~0.6倍轮胎的胎面宽度尺寸范围内选取,而货车的d值在40~60mm范围内选取。转向盘直径 Dsw 根据车型不同在JB4505—86转向盘尺寸标准中规定的系列内选取。 如果忽略摩擦损失,根据能量守恒原理,2Mr/Mh可用下式表示
wokh
riddMM
2
(7—6)
将式(7—6)代人式(7—5)后得到
aDiiswwoP2 (7—7)
当 α 和 Dsw 不变时,力传动比 ip 越大,虽然转向越轻,但 iwo 也越大,表明转向. 精选范本 不灵敏。 3.转向系的角传动比iwo 转向传动机构角传动比,除用 iw′=dβp/dβk表示以外,还可以近似地用转向节臂臂长L2与摇臂臂长Ll之比来表示,即 iw′=dβp/dβki≈L2/Ll 。现代汽车结构中,L2与L1的比值大约在0.85~1.1之间,可近似认为其比值为 iwo≈iw=dφ/dβ 。由此可见,研究转向系的传动比特性,只需研究转向器的角传动比 iw 及其变化规律即可。 4.转向器角传动比及其变化规律 式(7—7)表明:增大角传动比可以增加力传动比。从 ip=2Fw/Fh式可知,当Fw一定时,增大ip能减小作用在转向盘上的手力Fh,使操纵轻便。 考虑到 iwo≈iw ,由 iwo 的定义可知:对于一定的转向盘角速度,转向轮偏转角速度与转向器角传动比成反比。角传动比增加后,转向轮偏转角速度对转向盘角速度的响应变得迟钝,使转向操纵时间增长,汽车转向灵敏性降低,所以“轻”和“灵”构成一对矛盾。为解决这对矛盾,可采用变速比转向器。 齿轮齿条式、循环球式、蜗杆指销式转向器都可以制成变速比转向器。下面介绍齿轮齿条式转向器变速比工作原理。 根据相互啮合齿轮的基圆齿距必须相等, 即 Pbl=Pb2。其中齿轮基圆齿距Pbl=πmlcosα1,齿条基圆齿距 Pb2=πm2cosα2 。由上述两式可知:当齿轮具有标准模数m1和标准压力角α1与一个具有变模数m2、变压力角α2的齿条相啮合,并始终保持 m1cosoαl=m2cosoα2时,它们就可以啮合运转。如果齿条中部(相当汽车直线行驶位置)齿的压力角最大,向两端逐渐减小(模数也随之减小),则主动齿轮啮合半径也减小,致使转向盘每转动某同一角度时,齿条行程也随之减小。因此,转向器的传动比是变化的。图7—14是根据上述原理设计的齿轮齿条式转向器齿条压力角变化示例。从图中可以看到,位于齿条中部位置处的齿有较大压力角和齿轮有较大的节圆半径,而齿条齿有宽的齿根和浅斜的齿侧面;位于齿条两端的齿,齿根减薄,齿有陡斜的齿侧面。